-1си ,vr.i ,1 . Члемент 14 понорачи- :и попадания лаж- рног о луча и ), JH. /1ля регистрации движении к ч,1лу .0 присоединен гибки(| вал, nepi . KiioiiiHH число требуемых оПорптон к(1легп 2 на индикаторное приспособление, гс1Л повпрота передается че- реч колесо 3 и сегмент колеса ЗА. .
1
ИтоПретение относится к горному лепу и может быть использовано при прихолке выработок заданного профиля.
Целью изобретения является упро- ii(CHiie процес са К(;нтроля.
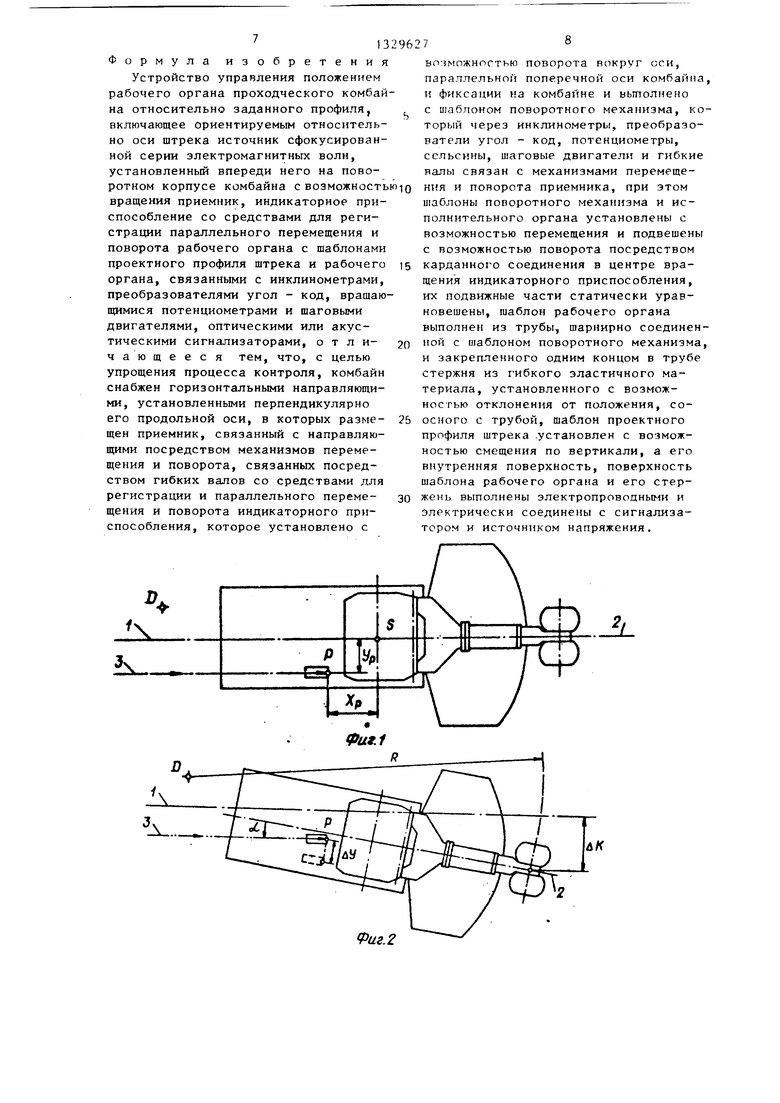
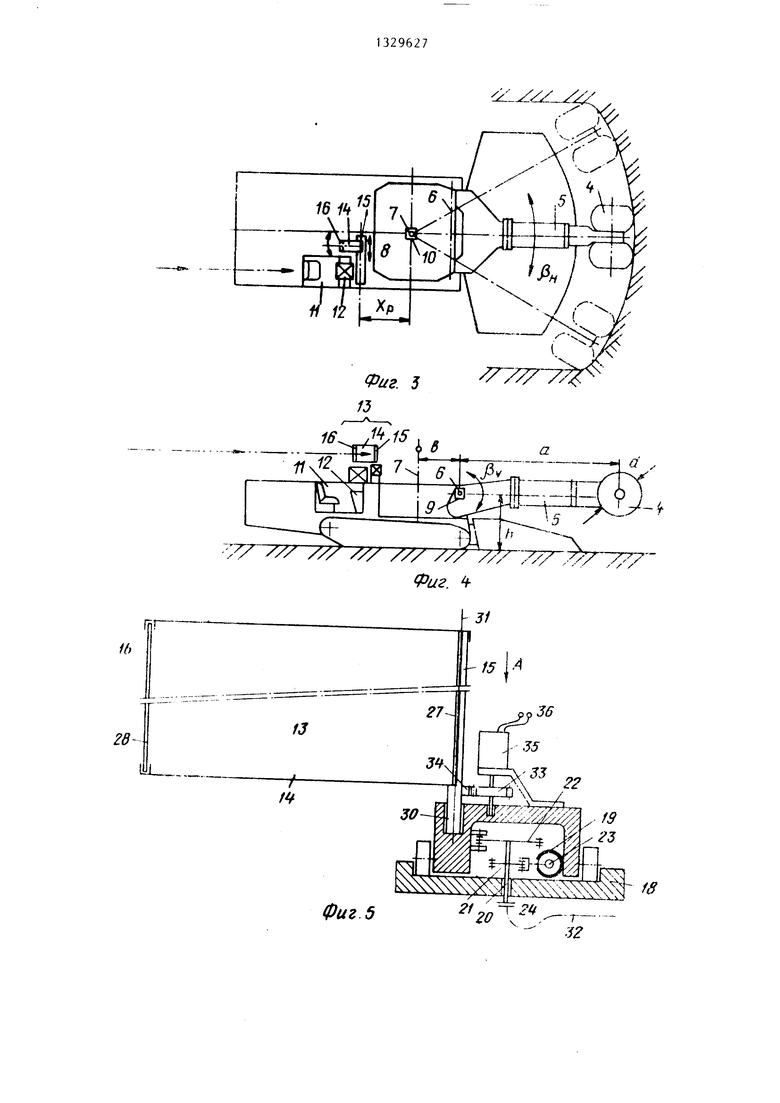
На фиг. 1-3 и- ображен комбайн, вид сверху; на фиг. Д - то же, вид сбоку; на ф иг. 5 - приемник, продольный раз- ре, па фиг. () - вид Л на фиг. 5; из фи . 7 - шкала приемника со стрел- на фиг. 3 - разрез )-Б на фиг.; на фи: , 9-13 - варианты шаблова про- фячя iinpeK.ij на фиг. 14 - индикатор- нос приспосо1 ление продольный разрез; на ||)И . 1 - пид S на фиг. 14, на фиг. 1Ь - схема отклонения комбайна пперх, ча фиг. 17 и 18 индикаторное приспособление, варианты, на фиг.19 - шаблон рабочего органа.
Устройство содержит ориентируе- Miiie (Относительно оси 1 штрека ось 2 комбайна и источник сфокусированной серии электромагнитных волн, например лучей 3, лазера.
Рабочий (.фган 4 находится на стреле 3 и может поворачиваться нок- руг ос1й 6 и 7 с помоЩ 1Ю механизма 8. В осях f) и 7 механизма 8 смонтированы у1 -1С1меры 9 и 10, которые дают для определенной величины угла определенный ана.ло1 овый или пифровой сигнал. Вверху перед кабиной I 1 установлено с во 1можностьН1 поворота индикаторное приспособление 12, приемник 13, имеющий перемещаемый и BpaoiaeNfbu i члемгнт 14 iMvKiKy с прорезью) и установленный впереди источника ноли lia корпусе .
1и:.:и к1:г. Г;ай ; отклоняется от про- скгн( гт :ложс 1ия, то лазерной) луч 3 не iH i au. K T n/i проектную линию (NiyiiiVc сройг ти.- и:.1оет (чаОлон : рабочег о органп, rrpoijK I Ho.i41 профиля штрека и поворотного М1 ханичмя. Шаблон последнего связан с м(-ханизмами перемещения и попорота 1риомиика 13 через инклинометры, ripeoojia oBai ели уг ол - код, п 1тепциг;метрь1, се.пьсины, наговые двигатели и гиГжие валы. 19 ил.
ку) диска IS ггрисмника 13. Оператор может визуально установить ято и, если отклонение к омбайна является только парал. и льиым перемещением, ., через гидрл влячс с кий привод совместить элемент 14 и лазерный луч 3. Если луч 3 и ::сь 2 комбайна расположены под yi.uoM, то лемевт 14 следует пс5рернуть так, чт(1бы луч 3 поП пал на диск 15 приемника 13 в проречь детали 1Ь приемника 13.
Пройденный угол измеряется и переносится на индикаторное приспособ- лерпк 12. Рама 17 приемника 13 пере метается п горязоитальных направляющих 18 )1ог1ерек продольной оси комбайна посредством гидроцилиндра 19 и депной передачи. С помощью общего вала 20, на котс ром находятся
0 малое колесо 21 и колесо 22, происходит увеличение хода цилиндра. С помо11и-|Ю рычага ручного управления ноди гел может ма ружать гидродилинд- ры 19. Через шток 23 и поводок 24
движение поршня передается на цепь 25, преобразуется с помощью обоих цепных KO.TICC на общем валу 20 и через цепь 2Ь идет на раму 17, тем самым осуи1естнляется движение рамы 17
0 поперек оси 2 комбайна до тех пор, пока лазерный гуч Я не попадет на продольный -.rit Mt HT 27 диска 15. Это возможнее 1 т( когд.а для ограничивающей проречьш 28 детали 16 исг, ки;ьзуегся светопроницаемый материал. Как тол)Ко луч попадает в злемент 27, движение перемещения прекращается родителем и нагружается цилиндр 29. Зто Н1лчывает понорот приемника
0 13 н опорах 1) вокруг оси 31 поворо- та. Так как ;; ; OIM, поштрота сонпа
дает с осью чувстпитг.льтюго элемента 27, его позиция не изменяется. Lnc- мент 14 с помоп1ью цилиндра 29 поворачивается вокруг оси 31 поворота до тех пор, пока лазерный луч 3 не попадет в прорезь 28, после чего поворот прекращается. Для регистрации этих движений к валу 20 присоединен гибкий вал 32, который передает числ требуемых оборотов цепного колеса 22 на индикаторное приспособление 1 Угол поворота передается через колесо 33 и сегмент колеса 34 на прибор 35 измерения угла. Последний выдает на выходных клеммах 36 сигнал, соответствующий углу поворота, с помощью которого в индикаторном приспособлении осуществляется перестановочное движение.
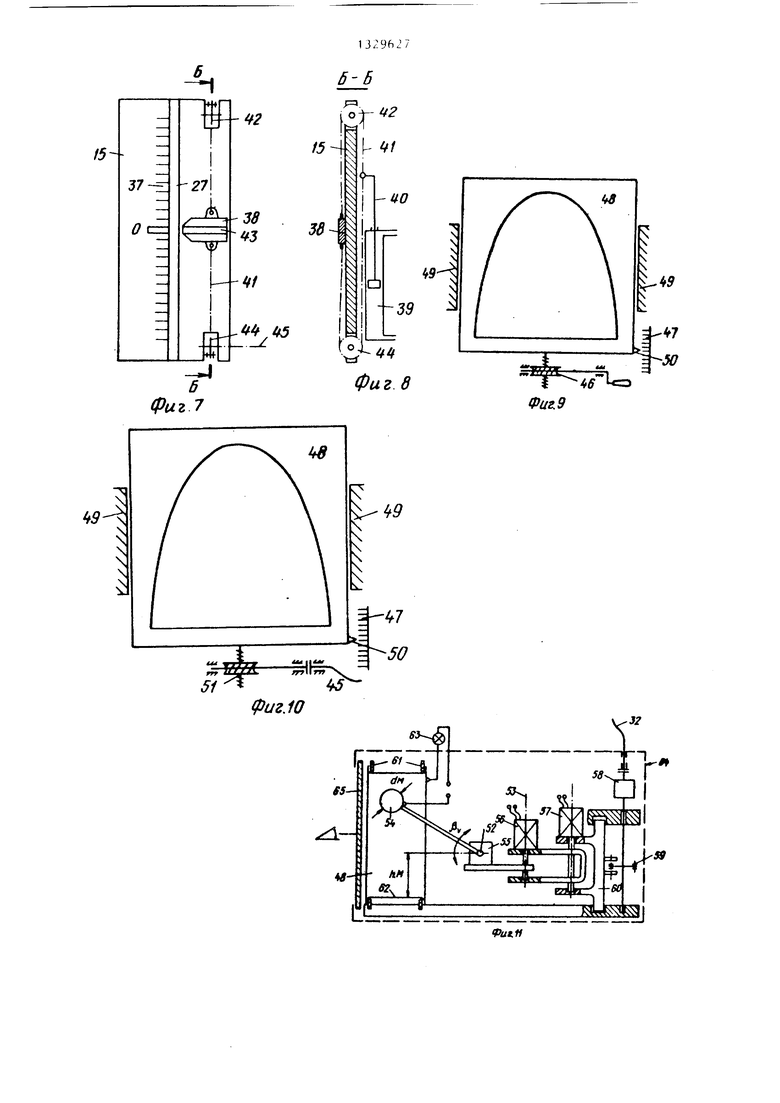
На диске 15 рядом с чувствительным элементом 27 (фиг. 7 и 8) размещена шкала 37, с нее оператор может считать величину, при которой попадает лазерный луч с учетом масштаба М шаблонов поворотного механизма и штрека.
Стрелка 38 (фиг. 8) вертикально перемещается цилиндром 39, штоком 40 цепью 41 и колесом 42 за счет приведения в действие гидравлического рычага ручного управления. При попадании лазерного луча на чувствительный элемент 27 со смещением относительно нулевой линии стрелка 38 перемещается до тех пор, пока ее отметка 43 не будет находиться на высоте лазерного луча. Этот путь стрелки може сниматься с колеса 44 и с помощью гибкого вала 45 передаваться в индикаторное приспособление 12 (фиг.10).
Расстояние между штрихами шкалы 37 равно М мм. Когда установлена величина отклонения на шкале 37, оператор должен установить ее с мощью ручного привода 46 на шкале 47. С этой целью шаблон 48 проектного штрека устанавливается в двух боковых направляющих 49 и отрегулированная величина на шкале показывается стрелкой 50. Деление шкалы составляет преимущественно 1 мм, так что штрих шкалы 47 соответствует штриху шкалы 37. Вертикальное движение корректировки может выполняться автоматически (фиг.10). Привод 51 через гибкий нал 45 соединен с колесом 44 приемника 13 (фиг.7 и 8) так что коррекция стрелки переносит
5
0
Q
штрска в умсиыигпном
с я на niafwioH 4i масштабе.
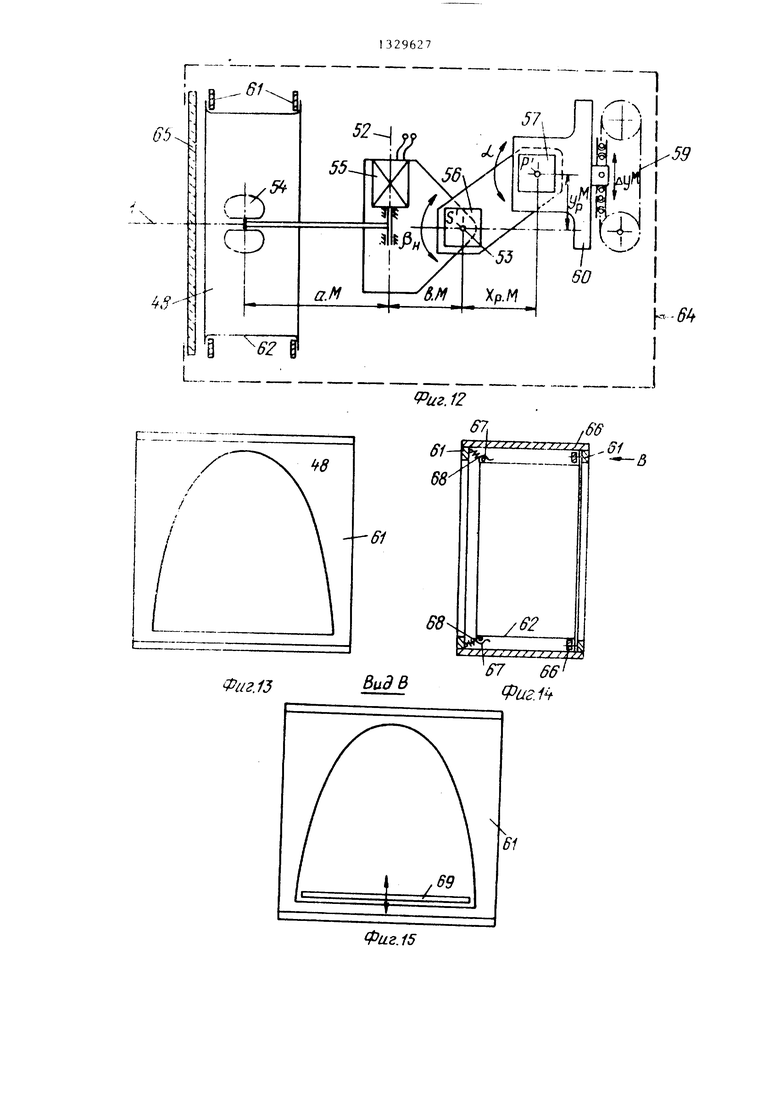
Шаблон поворотного механи- ма ет лпалогичные стсям 6 и 7 оси 2 и 53, вокруг которых почорлчивагтся шаблон 54 рабочего органа, и чсрр-э инклинометры, преобразователи уг ол - код, вращающиеся потенциомемрм, сельсины, шаговые двигатели и гибкие па т связан с механизмом перемещения.Поэтому, если с угломеров 9 и 10 (фиг. 3 и 4) снимается сигнал и направляется на исполнительные звенья 55 и 56, то последние занимают положение рабочего органа 4.
Если комбайн отклоняется в горизонтальной плоскости от проектного положения, то любое отклонение определяется с помощью приемника 13 и переносится на индикаторное приспособление 12. При этом величина угла передается от угломера 35 на исполнительное звено 57, за счет чего осу- 5 шествляется поворот шаблонов поворотного механизма и рабочего органа на тот же угол.
Если возникает параллельное отклонение, эта величина определяется приемником через гибкий вал 32, передается на передачу 58 с передаточ)1ым числом М и с помощью цепной передачи 59 вновь преобразуется в линейное движение. Тем самым салазки 60 (которые несут весь шаблон поворотного механизма) перемещаются поперек продольной оси на величину М между обоими профильными шаблонами 61, имеющими вырез в форме проектного профиля (фиг. 9 и 10). Между ними натянута гибкая электропроводная пленка 62, которая взаимодействует с электропроводной поверхностью шаблона рабочего органа, за счет чего можно подать оптический или акустический сигнал 63, когда достигнута граница профиля.
Все индикаторные приспособления находятся в защитном кожухе 64, закрытом на обращенной к водителю стороне с помощью стекла 65. После удаления стекла шаблон 48 штрека может выниматься и заменяться другим. Пленка 62 при отсутствии эластичности закрепляется на одном из шаблонов 61,
0
5
0
5
0
5
например, с помощью зажимной планки 66 и на втором шаблоне с помощью про- йолочной скобы 67 и нескольких пружин 68.
51
Основание d и;а(.пона - 48 штрека может псрег га г1,1Р.чиват1)Ся в псртнкаль ном напрап.пенни (фиг . 13).
(;и пиноротиого механизма шар- нирно под . посредством карданно- I o соедипонил, как маятник, и центре вращения D индикаториог о приспособления. fSenTp тяжести всего шаблона поворопмго механизма должен находиться под точкой )фашения Г,, для создания CTaOnnijHoi o положения, а подпижные части шаблонов статически уравно).
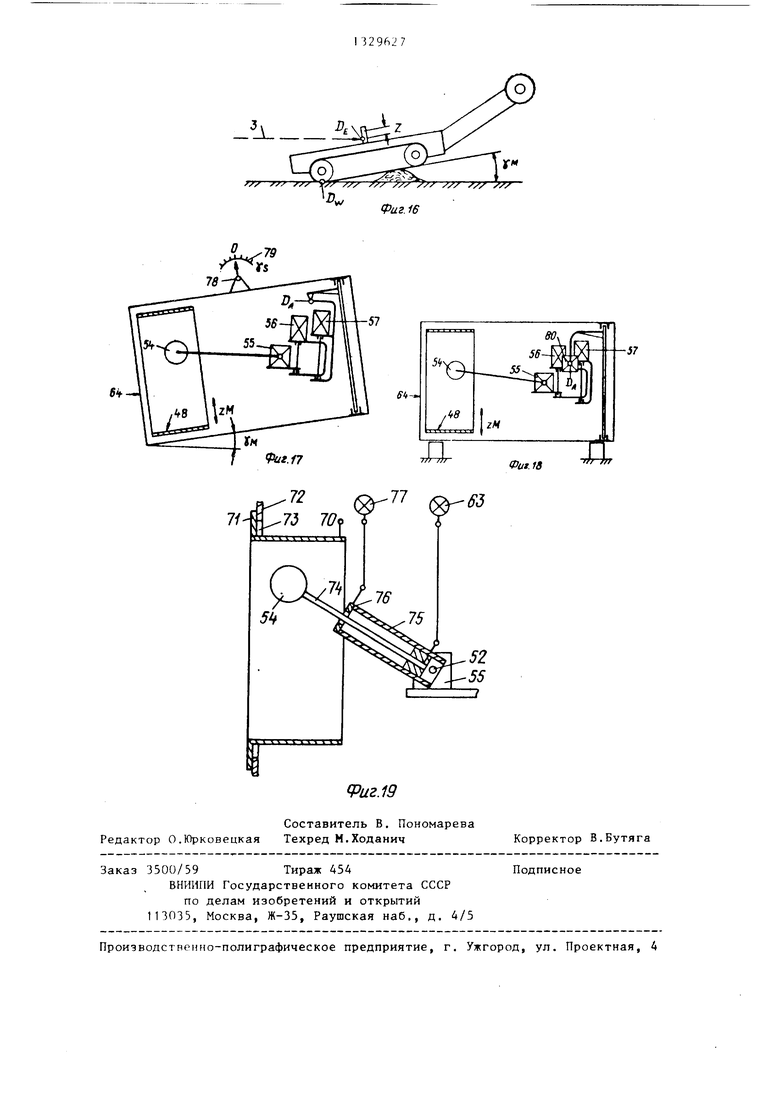
Шаблон 54 рабочего органа пере- с-танаг.динается с помощью исполнительного звена bS по вмсоте в соответствие, с перестановкой по высоте рабочего органа комбайна. С помошью исполнителт, звеньев 56 и 57 гори- зонталг.ные повороты рабочего органа и oтклoнefIИC крмбайь а с г оси штрека переносятся на индикаторное приспособленке. и1абдон 48 штрека переста- навливас-тся по высоте с учетом масштаба М. Шаблон 70 штрека может быть выполнен в виде трубы из листового металла (фиг. 19) с наружным фланцем 71 с одной стороны и внутренним г альваническим покрытием (например, серебр,1м1 для лучшего контакта с шлб.пг Ном 3ч режущей головки. Размеры в свету Поперечного сечения шаблс На профиля штрек:) 70 сог тветствуют проектному профи,П(, цодлежащег о проходке штр(;ка .
111.1 бiKiH /О п}К)филя штрека фланцами 71 закреплен на держателе 72 шаблона и зготоялеяиом из более прочного листового материапа и имеющем вырез 73 с умен 1 1епны-1 в масштабе профилем.
В вырез
7
авляется и фиксируется
шаблон иаружнсч о профиля.
Шабл1М jA з;п:рег1лс Н на гибком стрежне 7А, (шин конец которого зажат I трубе 7S. Последняя на открытом торцевом конце имеет контактную поверхность 76 к одiiдевой формы и другим концом (фе1тно соединена с испо:шител1.ньм звоном 55.
К(1гда шпб- топ т-1 рабочег о органа касается шаблона 70 профиля штрека, замыкается контур тока, запускающий первый сигч,. 61 (оптическиГ или акустическ;- ) и псгазынающ 1Й лости- жение грлняи профиля. Если этот сигна.и б . дст грен или на него осознлняо не обратят внимание, то при посде. :viiiuoN повороте имитатора
O
5
0
5
0
5
0
5
0
5
276
зарубного бара iчбкий стержень 74 деформируется п Г(и тг етствии со своей лини(й изги()а и ка(;:ается досле опре; елени1Ч о ПУТИ контактной поверхности 6 кольцев ш формы на торцевом к-онце rpyiVii 75. При этом замыкается следующиГг контур тока и запускается второй сигнап /7. Зазор кол1 цево1 формы между контактной по- вгрхн(ичч,н) 76 и стержнем 74 является мерой допустимого перерезания, на достижение которого yKa3F,iBaeT второй сигнал. (оотБстствукшшм назначением ширины этого зазора могут допускаться различные перерезания. По по- треблости могут запускаться другие сигналы, если установлены следующие контактные кольца и труба выполнена изгибаемой.
Ка;кд1)ГЙ контакт может, помимо сигнализации о достижении границы профиля или о переходе границы профиля на заранее определенную величину, использоваться для того, чтобы останавливать привод поворота проходческого комбайна.
С. помощью поворота индикаторного приспособления яокру оси 78 и фиксирования его и отклоненном от нулевого положении на шкале 79 может . ччтен 11ОСТОЯНН1ЛЙ угол подъема у. того, чтобы воспрепятствовать Ht-жодаомому колебанию вследствие сотрясений комбайна, в точке вращения Г д имс отся демпфер.
Дополнительно к исполнительным звеньям 55 - 37 может быть предусмотрено следукщее исполнительное звено 80 (фиг. 3) для того, чтобы обеспечить в зависимости от измерительных величин инглинометра или углово- г о ко 1ирующего устройства (преобразователь угол - код) поворот поворотного механизма вокруг заменяющей точку вращения Dj точки вращения комбайна, в которой установлен измерительный прибор. При таком выполнении фиг. о) кожух 64 установлен неподвижно на комбайне. Шаблон поворотного механизма внутри кожуха 64 поворачивается центра тяжести шаблона :uiBopc)T4oro механизма м по г поему горизонтальному положению соответствует положению приемника. Исполтштельное звено 80 может, например, выполняться в ви/де шагового мотора или сервомотора и поворачивает ВРС1 na6j;oH ловоротнш о механизма.
13
Формула изобретения
Устройство управления положением рабочего органа проходческого комбайна относительно заданного профиля, включающее ориентируемым относительно оси штрека источник сфокусированной серии электромагнитных волн, установленный впереди него на поворотном корпусе комбайна с воэможность вращения приемник, индикаторное приспособление со средствами для регистрации параллельного перемещения и поворота рабочего органа с шаблонами проектного профиля штрека и рабочего органа, связанными с инклинометрами, преобразователями угол - код, вращающимися потенциометрами и шаговыми двигателями, оптическими или акустическими сигнализаторами, о т л и
чающееся тем, что, с целью упрощения процесса контроля, комбайн снабжен горизонтальными направляющими, установленными перпендикулярно его продольной оси, в которых размещен приемник, связанный с направляющими посредством механизмов перемещения и поворота, связанных посредством гибких валов со средствами для регистрации и параллельного перемещения и поворота индикаторного приспособления, которое установлено с
8
возможностью поворота вокруг оси, параллельной поперечной оси комбайна, и фиксации на комбайне и вьтолнено с шаблоном поворотного механизма, который) через инклинометры, преобразователи угол - код, потенциометры, сельсины, шаговые двигатели и гибкие валы связан с механизмами перемещения и поворота приемника, при этом шаблоны поворотного механизма и исполнительного органа установлены с возможностью перемещения и подвешены с возможностью поворота посредством карданного соединения в центре вращения индикаторного приспособления, их подвижные части статически уравновешены, шаблон рабочего органа выполнен из трубы, шарнирно соединенной с шаблоном поворотного механизма, и закрепленного одним концом в трубе стержня из гибкого эластичного материала, установленного с возможностью отклонения от положения, со- осного с трубой, шаблон проектного профиля штрека .установлен с возможностью смещения по вертикали, а его внутренняя поверхность, поверхность шаблона рабочего органа и его стержень выполнены электропроводными и электрически соединены с сигнализатором и источником напряжения.
иг.2
Фиг 5
f8
20
б
Фиг
39
Фиг 8
Фиг. 9
ff
51
фиг,10
S5
-ti-1 -50
.Ъ,.
иг. 12
57,
М
.31
в
Фаг.13
Вид В
фиг. 15
Фиг. 16
fut.17
6kФа. 18
6д
Редактор О.Юрковецкая
(Риг.19
Составитель В. Пономарева Техред М.Ходанич
Заказ 3500/59 Тираж 454
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
Корректор В.Бутяга
Подписное
Изобретение относится к горному делу, м.б. использовано при проходке вьфаботок заданного профиля и упрощает процесс контроля. Устр-во имеет индикаторное приспособление и приемник 13 с перемещаемым и вращаемым элементом 14. Рама (Р) 17 приемника 13 размещена в горизонтальных направляющих 18, установленных перпендикулярно продольной оси комбайна, и имеет механизмы перемещения и поворота. Вдоль направляющих Р 17 перемещается посредством гидроцилиндра 19 и цепной передачи. Через шток 23 и поводок 24 движение поршня передается на цепь 25, преобразуется с помощью цепных колес 21 и 22 на общем валу 20 и через цепь 26 передается на Р 17 перемещая ее до тех пор, пока лазерный луч 3 не попадет на продольный элемент 27 диска 15 приемника 13. При попадании луча на элемент 27 перемещение Р 17 прекращается и нагружается цилиндр 29. Обеспечивается поворот приемника в опорах 30 вокруг § (У) f9 со ю со О5 to r tS ы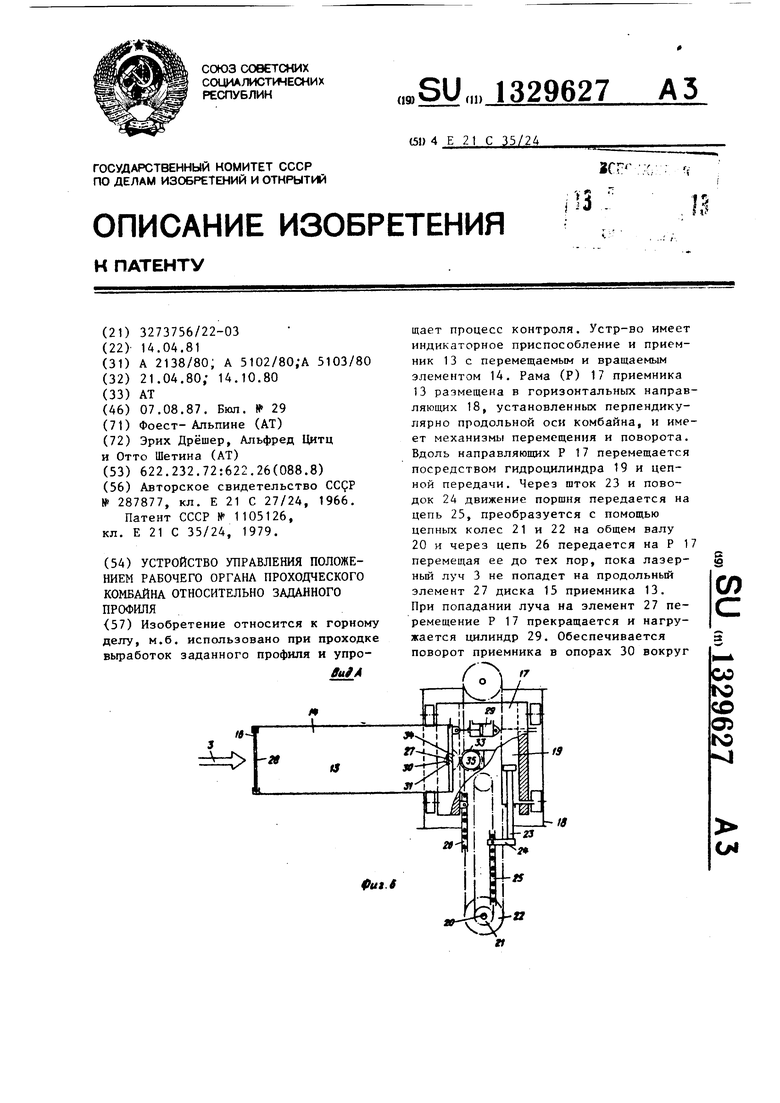
| УКАЗАТЕЛЬ ПОЛОЖЕНИЯ РАБОЧЕГО ОРГАНА ПРОХОДЧЕСКОГО КОМБАЙНА | 0 |
|
SU287877A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Способ управления положением рабочего органа проходческого комбайна и устройство для его осуществления | 1979 |
|
SU1105126A3 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
