Изобретение относится к устройствам пожаротушения, а именно к роботизированным установкам пожаротушения, пожарным роботам и пожарным стволам.
Известны роботизированные установки пожаротушения, см., например, патент № 2807716 «Роботизированная установка пожаротушения повторно-кратковременного действия модульного типа». Недостатком известных устройств является использование в их составе отдельных устройств по перекрытию потока с большой инерционностью, что значительно снижает быстродействие и ограничивает возможность применения установок модульного типа.
Наиболее близким по технической сути является устройство по патенту № 2699849 «Пожарный мини-робот в потолочном исполнении», включающее в себя пожарный ствол, установленный на стойке с фланцем, направленный вниз, снабженный приводами вертикального и горизонтального наведения, блок программного управления, устройство обнаружения загорания и насадок, состоящий из головки насадка с приводом регулирования угла распыливания струи с энкодером, корпуса насадка, тарельчатого сердечника со штоком, втулки перекрытия.
Недостатком данного устройств является необходимость для перекрытия потока пройти стадию регулирования струи, например, если струя широкая, но нужно перейти на прямую струю, а потом уже следует перекрытие, также отсутствует возможность регулирования расхода, что ограничивает применение устройства.
В основу изобретения поставлена задача создания устройства с независимым механизмом перекрытия с возможностью регулирования расхода.
Эта цель достигается тем, что в устройстве, включающее в себя пожарный ствол, установленный на стойке с фланцем, направленный вниз, снабженный приводами вертикального и горизонтального наведения, блок программного управления, устройство обнаружения загорания и насадок, состоящий из головки насадка с приводом регулирования угла распыливания струи, корпуса насадка, тарельчатого сердечника со штоком и втулки перекрытия,
на втулку перекрытия устанавливают корпуса линейных приводов перекрытия и регулирования угла распыливания струи с энкодерами, при этом подвижную часть линейного привода перекрытия соединяют с корпусом насадка, а подвижную часть линейного привода регулирования угла распыливания струи соединяют с головкой насадка,
дополнительно вводят датчик давления, устанавливаемый на стойке с фланцем, при этом в блок программного управления вводят дополнительную программу установки заданного расхода и автоматического регулирования расхода с использованием обратной связи о положении втулки перекрытия и о давлении на входе в ствол от энкодера линейного привода перекрытия и датчика давления, которые соединяют с блоком программного управления.
Предложенное техническое решение с независимым приводом позволяет перекрывать подачу воды при любой форме струи, а возможность установки заданного расхода и автоматической регулировки расхода в зависимости от изменения напора в сети повышает качество и точность подачи струи, что значительно повышает эффективность и расширяет область применения устройства.
Автору не известны устройства с отличительными признаками в соответствии с заявляемыми техническими решениями.
Изобретение отвечает требованиям новизны и положительного эффекта, а также критерию “существенные отличия”.
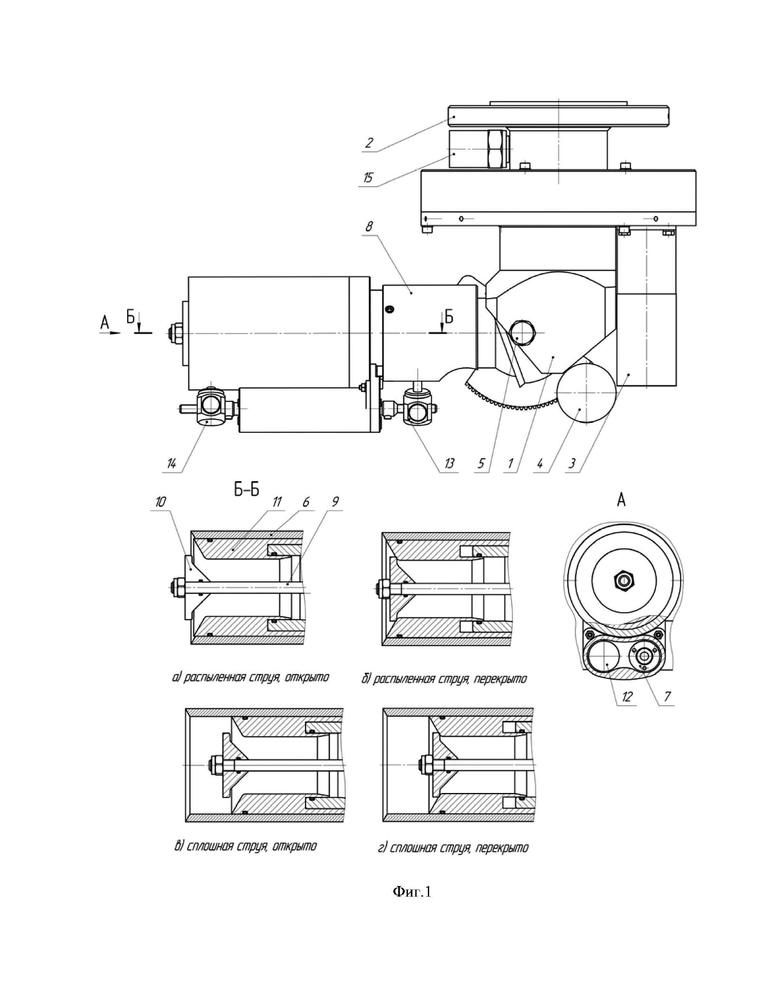
На фиг.1 представлен пожарный робот в потолочном исполнении с регулируемым клапаном перекрытия.
Устройство содержит пожарный ствол 1, направленный вниз, устанавливаемый на стойке с фланцем 2, монтируемой на пожарном трубопроводе, снабженный приводами горизонтального наведения 3 и вертикального наведения 4 ствола 1 с использованием поворотного канала в виде шарового шарнира на полуосях 5. В устройство входит также насадок, включающий в себя головку насадка 6, перемещаемую линейным приводом регулирования угла распыливания струи с энкодером 7, корпус насадка 8, шток 9 с тарельчатым сердечником 10, втулку перекрытия 11. На втулке перекрытия 11 жестко закреплен линейный привод перекрытия с энкодером 12, при этом его подвижная часть 13, например, в виде передачи винт-гайка, соединена с корпусом насадка 8. На втулке перекрытия 11 установлен линейный привод регулирования угла распыливания струи 7, при этом подвижная часть 14 линейного привода 7 соединена с головкой насадка 6. На стойке с фланцем 2 установлен датчик давления 15 для измерения давления на входе в ствол 1. Для управления приводами наведения 3, 4 и линейными приводами 7, 12 используется устройство обнаружения загорания и блок программного управления, соединенный с энкодерами линейных приводов 7, 12 и датчиком давления 15 информационными каналами (не показано). Блок программного управления содержит программу установки заданного расхода и программу автоматического регулирования расхода с использованием обратной связи от датчика давления 15 о напоре сети на входе в ствол 1 и от энкодера линейного привода 12 о положении втулки перекрытия 11 относительно тарельчатого сердечника 10, определяющей кольцевой щелевой зазор и, соответственно, проходное сечение и расход на выходе струи из насадка.
Устройство работает следующим образом. В дежурном режиме пожарный робот находится в режиме ожидания. Насадок в состоянии «перекрыто»: втулка перекрытия 11 плотно прилегает к тарельчатому сердечнику 10, при этом втулка перекрытия 11 находится в крайнем левом положении, см. фиг.1 (б,г). При поступлении сигнала «Пожар» пожарный робот включается посредством блока программного управления в режим поиска, при этом включается привод горизонтального наведения 3 с устройством обнаружения загорания для кругового обзора. При обнаружении координат загорания ствол с насадком 1 приводами наведения 3,4 наводится на очаг загорания. Блок программного управления подает команду на тушение по заданным координатам, при этом привод регулирования угла распыливания струи 7 перемещает подвижную часть привода 14 с головкой насадка 6 в позицию, соответствующую заданному углу распыливания. После этого блок программного управления подает команду на подачу воды линейному приводу 12, который переводит втулку перекрытия 11 в положение «открыто», см. фиг.1 (а, в). В соответствии с нормативными требованиями, расход установки пожаротушения зависит от группы защищаемого помещения по пожароопасности. Нормативный расход может быть определен кольцевым щелевым зазором, определяемым положением втулки перекрытия 11 и тарельчатым сердечником 10 в соответствии с программой расхода, установленной в блоке программного управления при пуско-наладочных работах данного объекта. Программа также предусматривает автоматическое регулирование расхода относительно заданного нормативного расхода регулированием кольцевого щелевого зазора при изменении давления в сети противопожарного водоснабжения по информации от датчика давления 15, что позволяет оптимизировать дальность подачи струи при колебаниях напора.
Предложенный пожарный робот в потолочном исполнении, расположенный в зоне, удобной для обозрения и наведения струи на очаг пожара, является эффективным автоматически и дистанционно управляемым средством борьбы с пожарами, позволяющим направить поток огнетушащего вещества непосредственно на очаг загорания, обнаруженный в ранней стадии.
В отличие от известных, предложенный пожарный робот имеет независимое компактное перекрывное устройство с возможностью программной установки расхода и автоматической регулировки расхода при колебаниях напора в сети, что позволяет значительно повысить эффективность устройства, использовать огнетушащее вещество адресно, не допуская его применения вне зоны загорания, приносящего дополнительный ущерб, что особенно актуально для музейных объектов, зрелищных сооружений, объектов с массовым пребыванием людей.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОЖАРНЫЙ МИНИ-РОБОТ В ПОТОЛОЧНОМ ИСПОЛНЕНИИ | 2019 |
|
RU2699849C1 |
| Пожарный мини-робот с тонкораспыленной водой высокого давления | 2024 |
|
RU2832524C1 |
| Роботизированная установка пожаротушения модульного типа повторно-кратковременного действия | 2020 |
|
RU2751690C1 |
| РОБОТИЗИРОВАННАЯ УСТАНОВКА ПОЖАРОТУШЕНИЯ МОБИЛЬНАЯ НА БАЗЕ ПОЖАРНЫХ РОБОТОВ С ТЕЛЕСКОПИЧЕСКИМ МАНИПУЛЯТОРОМ И ВОДОЗАПОРНЫХ КЛАПАНОВ С ПОДВИЖНЫМ СЕДЛОМ | 2020 |
|
RU2740968C1 |
| Роботизированная установка пожаротушения с системой оптимизации и контроля параметров тушения | 2020 |
|
RU2739820C1 |
| Роботизированная установка пожаротушения контейнерная для автоматизированных складов | 2020 |
|
RU2739816C1 |
| РОБОТИЗИРОВАННАЯ УСТАНОВКА ПОЖАРОТУШЕНИЯ МОДУЛЬНОГО ТИПА ПОВТОРНО-КРАТКОВРЕМЕННОГО ДЕЙСТВИЯ | 2022 |
|
RU2785398C1 |
| САМОДВИЖУЩИЙСЯ КОМПЛЕКС ПОЖАРОТУШЕНИЯ НА БАЗЕ САМОХОДНОГО РОБОТА | 2020 |
|
RU2755461C1 |
| РОБОТИЗИРОВАННАЯ УСТАНОВКА ПОЖАРОТУШЕНИЯ С СИСТЕМОЙ КОРРЕКЦИИ СТРУИ | 2020 |
|
RU2745641C1 |
| РОБОТИЗИРОВАННАЯ УСТАНОВКА ПОЖАРОТУШЕНИЯ С СИСТЕМОЙ БЛИЦ-МОНИТОРИНГА | 2020 |
|
RU2739390C1 |
Изобретение относится к области роботизированных установок пожаротушения, а именно к пожарному роботу в потолочном исполнении с регулируемым клапаном перекрытия. Робот включает в себя пожарный ствол, установленный на стойке с фланцем, направленный вниз, снабженный приводами вертикального и горизонтального наведения, блок программного управления, устройство обнаружения загорания и насадок, состоящий из головки насадка с приводом регулирования угла распыливания струи, корпуса насадка, тарельчатого сердечника со штоком и втулки перекрытия, на втулке перекрытия установлены корпусы линейных приводов перекрытия и регулирования угла распыливания струи с энкодерами, при этом подвижная часть линейного привода перекрытия соединена с корпусом насадка, а подвижная часть линейного привода регулирования угла распыливания струи соединена с головкой насадка, дополнительно на стойке с фланцем установлен датчик давления, при этом в блок программного управления введена дополнительная программа установки заданного расхода и автоматического регулирования расхода с использованием обратной связи о положении втулки перекрытия и о давлении на входе в ствол от энкодера линейного привода перекрытия и датчика давления, которые соединены с блоком программного управления. Предложенное устройство позволяет перекрывать подачу воды при любой форме струи, а возможность установки заданного расхода и автоматической регулировки расхода в зависимости от изменения напора в сети повышает качество и точность подачи струи, что значительно повышает эффективность и расширяет область применения устройства. 1 ил.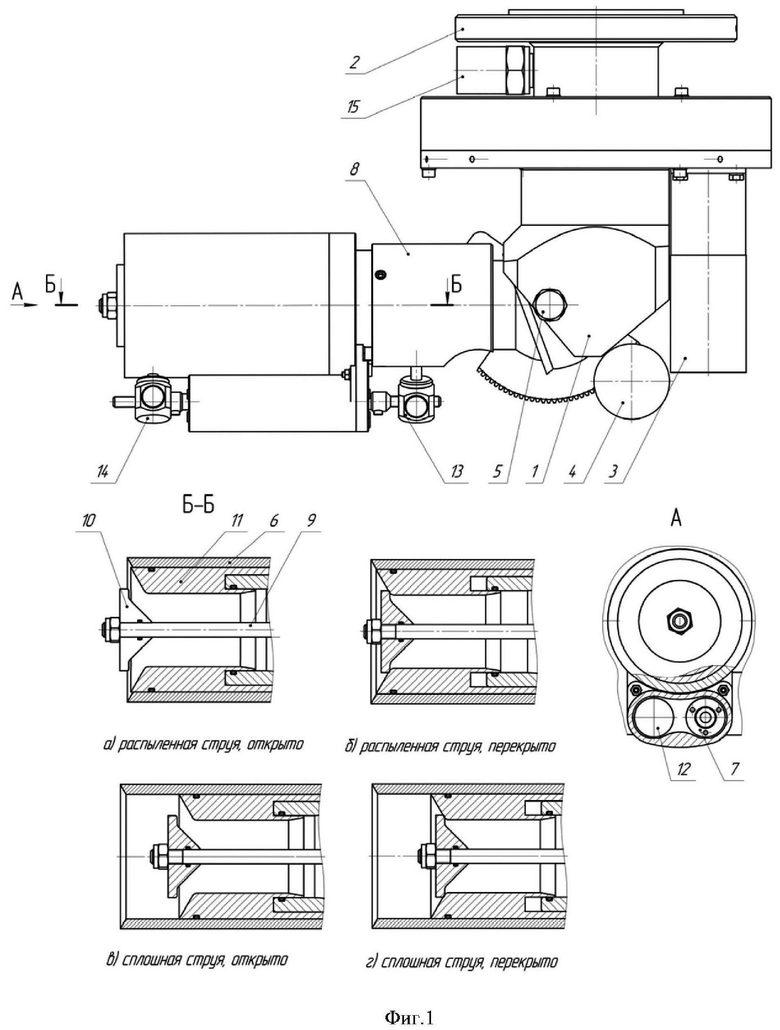
Пожарный робот в потолочном исполнении с регулируемым клапаном перекрытия, включающий в себя пожарный ствол, установленный на стойке с фланцем, направленный вниз, снабженный приводами вертикального и горизонтального наведения, блок программного управления, устройство обнаружения загорания и насадок, состоящий из головки насадка с приводом регулирования угла распыливания струи, корпуса насадка, тарельчатого сердечника со штоком и втулки перекрытия, отличающийся тем, что
на втулке перекрытия установлены линейные приводы перекрытия и регулирования угла распыливания струи с энкодерами,
при этом подвижная часть линейного привода перекрытия соединена с корпусом насадка, а подвижная часть линейного привода регулирования угла распыливания струи соединена с головкой насадка,
на стойке с фланцем установлен датчик давления,
блок программного управления соединен с энкодерами линейных приводов и датчиком давления,
при этом блок программного управления выполнен с возможностью установки расхода и автоматического регулирования расхода с использованием обратной связи от датчика давления о давлении на входе в ствол и от энкодера линейного привода перекрытия о положении втулки перекрытия.
| ПОЖАРНЫЙ МИНИ-РОБОТ В ПОТОЛОЧНОМ ИСПОЛНЕНИИ | 2019 |
|
RU2699849C1 |
| РОБОТИЗИРОВАННАЯ УСТАНОВКА ПОЖАРОТУШЕНИЯ | 2010 |
|
RU2412732C1 |
| CN 209696131 U, 29.11.2019 | |||
| KR 101099376 B1, 29.12.2011 | |||
| CN 110812745 A, 21.02.2020 | |||
| JP 8266671 A, 15.10.1996 | |||
| CN 208525703 U, 22.02.2019. | |||

