Область техники
Настоящее изобретение относится к области ядерной техники и может быть преимущественно использовано в системах управления ядерными реакторами.
Уровень техники
Известны способы регулирования параметров ядерного реактора путем перемещения органов регулирования реактивности (ОРР) по сигналу отклонения измеренного параметра от заданного значения, например, мощность ядерного реактора, давление пара, температура теплоносителя ядерного реактора, комбинация этих параметров и т.д. [заявка США № 20040114703 на изобретение от 17.06.2004].
Недостатком известного способа является ухудшение качества переходных процессов при увеличении скорости и глубины маневра мощности.
Известен способ автоматического управления мощностью ядерного реактора [см. описание изобретения к патенту RU 2589038 С1 «Способ регулирования параметров ядерного реактора», опубл. 10.07.2016].
Известный способ содержит регулирование параметров ядерного реактора путем изменения его мощности управлением перемещения ОРР по сигналу отклонения измеренного параметра (мощность ядерного реактора, давление пара, температура теплоносителя ядерного реактора, комбинация этих параметров и т.д.) от заданного значения. Дополнительно к вышеописанному, вводят операцию формирования характеристики регулятора по сигналу вычисленной положительной и отрицательной реактивности ядерного реактора и операцию коррекции коэффициента усиления регулятора в зависимости от значения и знака реактивности, причем, когда по сигналу отклонения измеренного параметра от заданного значения вводят сигнал вычисленной положительной или отрицательной реактивности, коэффициент усиления регулятора уменьшают пропорционально увеличению соответственно положительной или отрицательной реактивности по заданному алгоритму коррекции.
Недостатком известного способа является перерегулирование при переходе на более высокую заданную мощность работы реактора.
При изменении заданной мощности на более высокую необходимо перевести реактор в надкритическое состояние по запаздывающим нейтронам. Вводится избыточная реактивность, значение которой остается неизменным до достижения нижнего значения зоны нечувствительности поддерживаемого параметра. Затем, чтобы стабилизировать уровень мощности, необходимо перевести реактор в критическое состояние (скомпенсировать введенную избыточную реактивность). Опираясь на вышеописанное, следует, что движение исполнительного механизма (ИМ) ОРР в сторону уменьшения реактивности начинается тогда, когда значение мощности достигнет нижнего значения зоны нечувствительности. Поскольку скорость движения ИМ ограничена, то мощность будет расти до тех пор, пока не будет скомпенсирована вся введенная реактивность, приводя к перерегулированию.
Совокупность признаков, наиболее близкая к совокупности существенных признаков изобретения, присуща известному способу автоматического управления мощностью исследовательской ядерной установки [см. Алексаков Г.Н., Алферов В.П., Белоусов В.И. «Экспериментальное исследование оптимальных процессов управления нейтронным потоком ядерного реактора. «Атомная энергия» т. 39, вып. 6, декабрь 1975, с. 427-430].
Управление нейтронным потоком (мощностью) реализуется на основе логического закона управления, опирающегося на текущие значения сигналов отклонений мощности и скорости изменения мощности реактора, а также величины отклонений от них.
Сигнал на перемещение в сторону увеличения реактивности ОРР возникает в случае выполнения двух условий:
- текущее значение мощности меньше или равно заданному значению мощности за вычетом половины допустимой ошибки по мощности;
- скорость изменения мощности за вычетом заданной скорости подъема мощности по абсолютной величине больше или равна половине допустимой ошибки по скорости.
Сигнал на перемещение в сторону уменьшения реактивности ОРР формируется в случае выполнения двух условий:
- текущее значение мощности больше или равно заданному значению мощности с учетом половины допустимой ошибки мощности;
- скорость изменения мощности за вычетом заданной скорости снижения мощности по абсолютной величине больше или равна половине допустимой ошибке по скорости.
Сигнал, не требующий перемещения ОРР, формируется при выполнении одного из условий:
- текущее значение мощности меньше заданного значения мощности за вычетом половины допустимой ошибки по скорости и скорость изменения мощности за вычетом заданной скорости снижения мощности по абсолютной величине меньше половины допустимой ошибки по скорости;
- текущее значение мощности больше заданного значения мощности с учетом половины допустимой ошибки по скорости и скорость изменения мощности за вычетом заданной скорости снижения мощности по абсолютной величине меньше половины допустимой ошибки по скорости;
- текущее значение мощности за вычетом заданного значения мощности по абсолютной величине меньше половины ошибки по мощности и скорость изменения мощности больше заданной скорости снижения мощности за вычетом допустимой ошибки, но меньше заданной скорости подъема мощности с учетом половины допустимой ошибки по скорости.
Сформированный логическим законом управления сигнал передается на блок управления двигателем.
Недостатками известного способа, принятого за прототип, является ухудшенное качество переходных процессов (перерегулирование) как при снижении заданной мощности, так и при ее увеличении, а также автоматическое управление нейтронным потоком одним ОРР.
Указанные недостатки обусловлены следующим: процесс поддержания уровня мощности осуществляется одним ОРР. ИМ ОРР имеет ограниченную скорость перемещения, которая не позволяет вводить или компенсировать реактивность с более высокой скоростью. В процессе перехода от участка разгона реактора на стационарную мощность или при переходе со стационарно поддерживаемой мощности на более высокую мощность избыточная реактивность гасится в течение некоторого времени, характерного для максимальной скорости ИМ ОРР. За время от начала движения ОРР в сторону уменьшения реактивности до момента полной компенсации введенной избыточной реактивности мощность продолжает расти, тем самым приводя к перерегулированию.
При снижении заданной мощности перемещение ОРР в сторону уменьшения реактивности происходит до тех пор, пока величина текущей мощности не достигнет заданного значения. Чем больше разница между текущим значением мощности и заданным, тем большая отрицательная реактивность будет введена. Достигнув заданного значения мощности, реактор будет подкритичен, мощность будет снижаться и остановится орган изменения реактивности. Когда мощность выйдет за нижнюю границу поддержания мощности, начнется движение ОРР в сторону увеличения реактивности. Описанное перемещение ОРР приводит к перерегулированию при снижении заданной мощности, а также может привести к автоколебательному процессу.
Раскрытие изобретения
Технической проблемой, на решение которой направлено заявляемое изобретение является автоматическое управление мощностью исследовательского ядерного реактора, при котором будет минимизировано перерегулирование при изменении заданной мощности работы.
Техническим результатом настоящего изобретения является автоматическое управление мощностью исследовательского ядерного реактора с улучшением качества переходных процессов.
Технический результат достигается тем, что в способе автоматического управления мощностью исследовательской ядерной установки в переходных процессах по рабочему управляющему сигналу, сформированному на основе суммы сигналов реакций на отклонение мощности реактора и на скорость изменения мощности реактора от заданных значений, в котором при получении управляющего сигнала на увеличение реактивности осуществляют перемещение органа регулирования, новым является то, что при переходе с одной мощности на другую применяют разное количество органов регулирования реактивности, причем на этапе перехода с меньшей мощности на большую и наоборот регулирование реактивности осуществляют поочередно одним из группы органов регулирования реактивности и количество задействованных в одном цикле органов регулирования реактивности выбирают исходя из того, чтобы обеспечить сохранение равномерности распределения поля делений в активной зоне исследовательского ядерного реактора и дополнительно на этапе перехода с меньшей мощности на большую при превышении текущей мощностью порогового значения на заранее установленную величину и при получении управляющего сигнала на уменьшение реактивности сравнивают текущую величину реактивности с установленным ограничением по вводу отрицательной реактивности и если значение превышает установленное ограничение, то осуществляют перемещение группы органов регулирования реактивности.
Для улучшения качества переходного процесса при увеличении заданной мощности используются несколько исполнительных механизмов органов регулирования реактивности при перемещении их в сторону уменьшения реактивности.
Для улучшения качества переходного процесса при снижении заданной мощности используется ограничение, которое не позволяет вводить излишнюю отрицательную реактивность (перемещать орган регулирования реактивности в активную зону) при снижении заданной мощности.
Краткое описание чертежей
Признаки и сущность заявленного изобретения поясняются в следующем детальном описании, иллюстрируемом чертежами, где показано следующее.
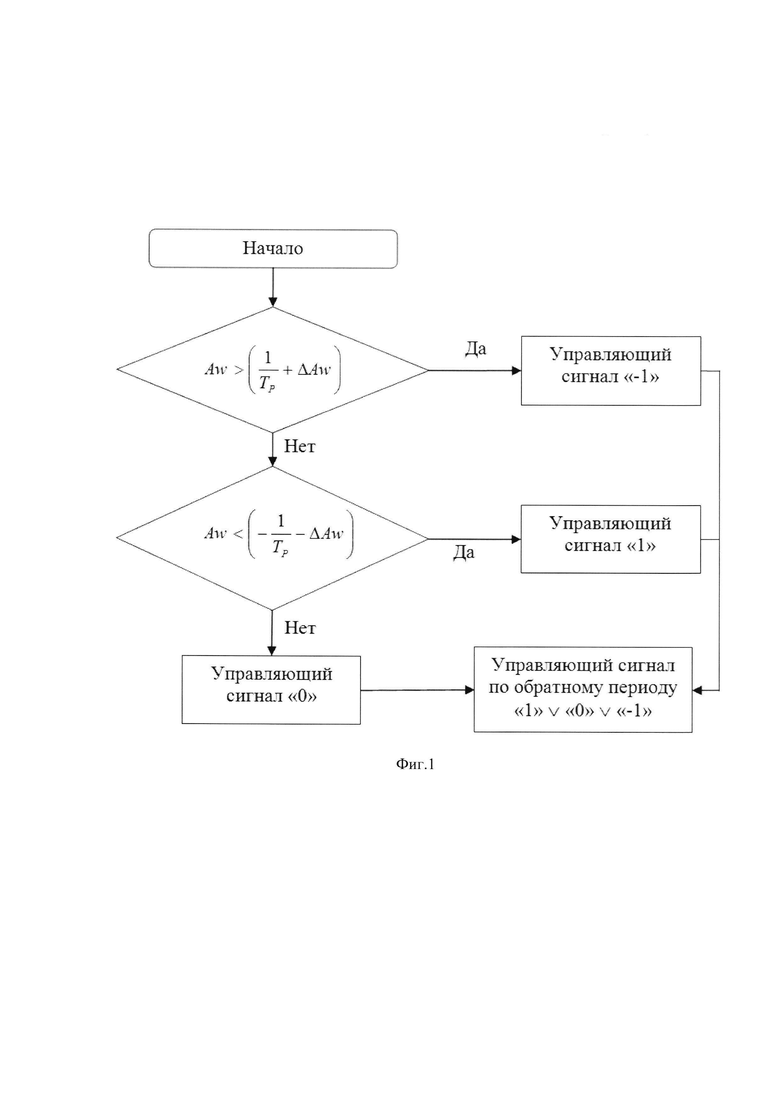
На фиг. 1 представлено формирование управляющего сигнала по скорости изменения мощности ядерного реактора, где Aw - обратный период ядерного реактора;
Tp - заданный период ядерного реактора;
ΔAw - допустимое отклонение от обратного заданного периода ядерного реактора.
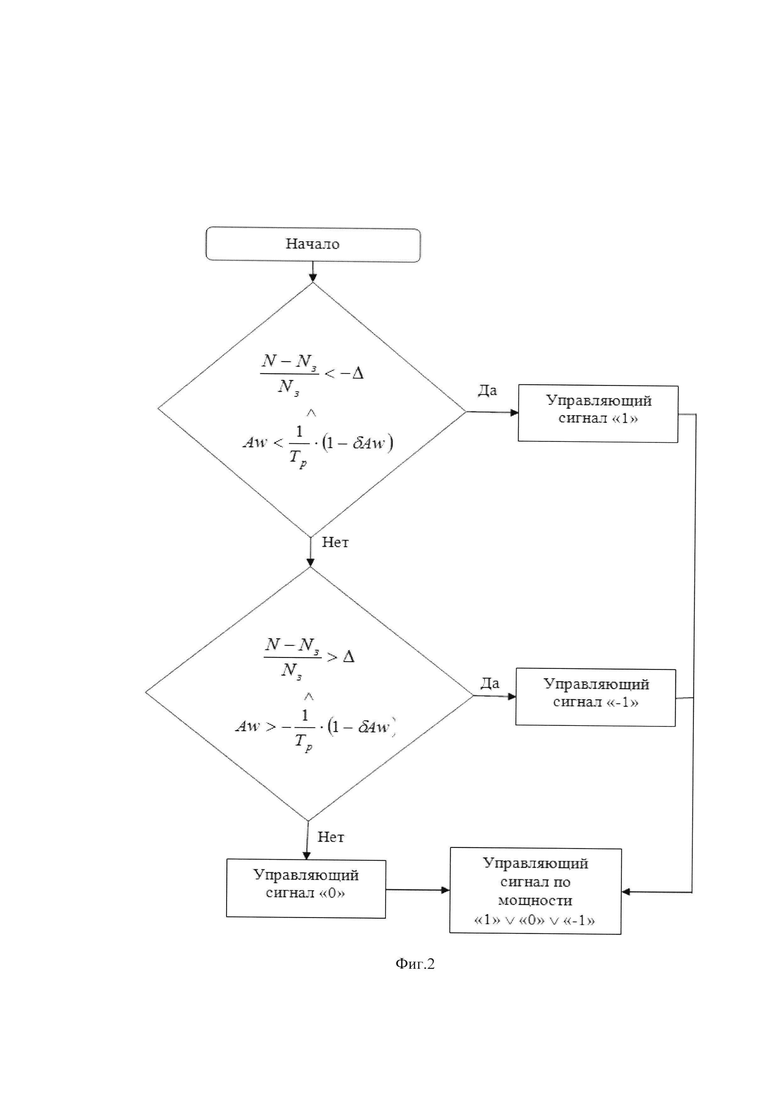
На фиг. 2 представлено формирование управляющего сигнала по мощности,
где N - измеренная мощность ядерного реактора;
N3 - заданная мощность ядерного реактора;
Δ - относительное допустимое отклонение от заданной мощности;
δAw - относительное отклонение от обратного заданного периода разгона ядерного реактора.
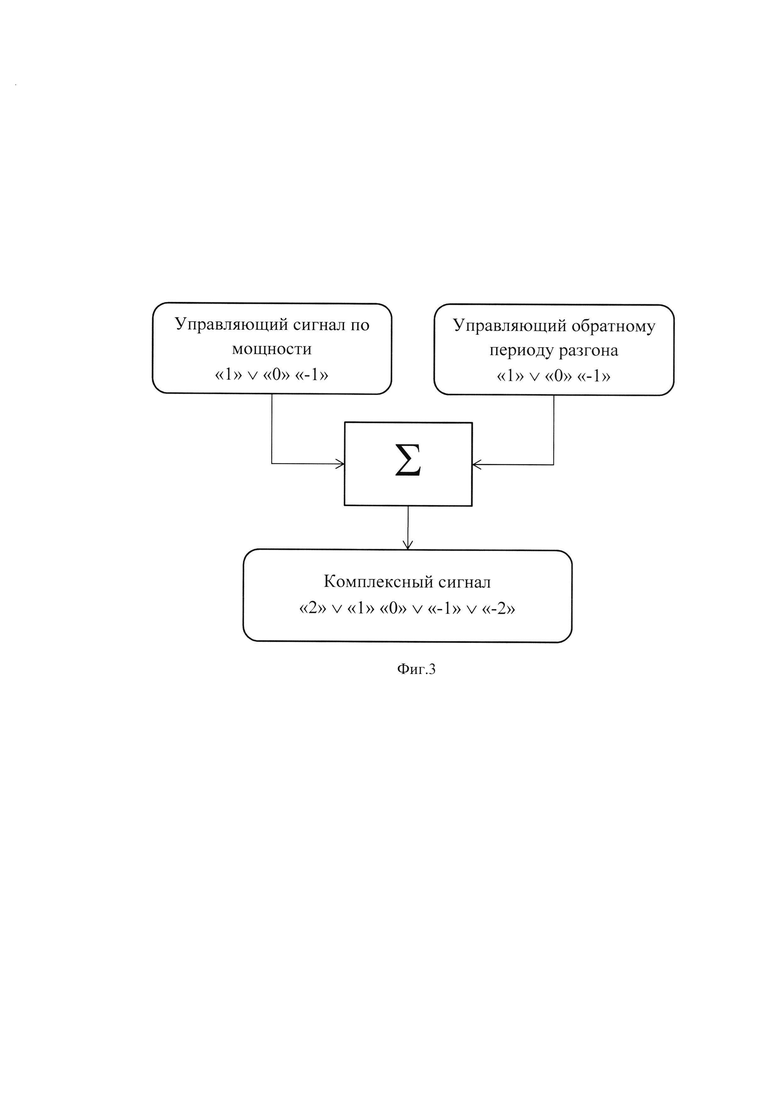
На фиг. 3 представлено формирование комплексного управляющего сигнала.
Комплексный сигнал представляет собой сумму двух компонент: управляющего сигнала по обратному периоду и управляющему сигналу по мощности. Комплексный сигнал может принимать значения, равные «-2», «-1», «0», «1» и «2».
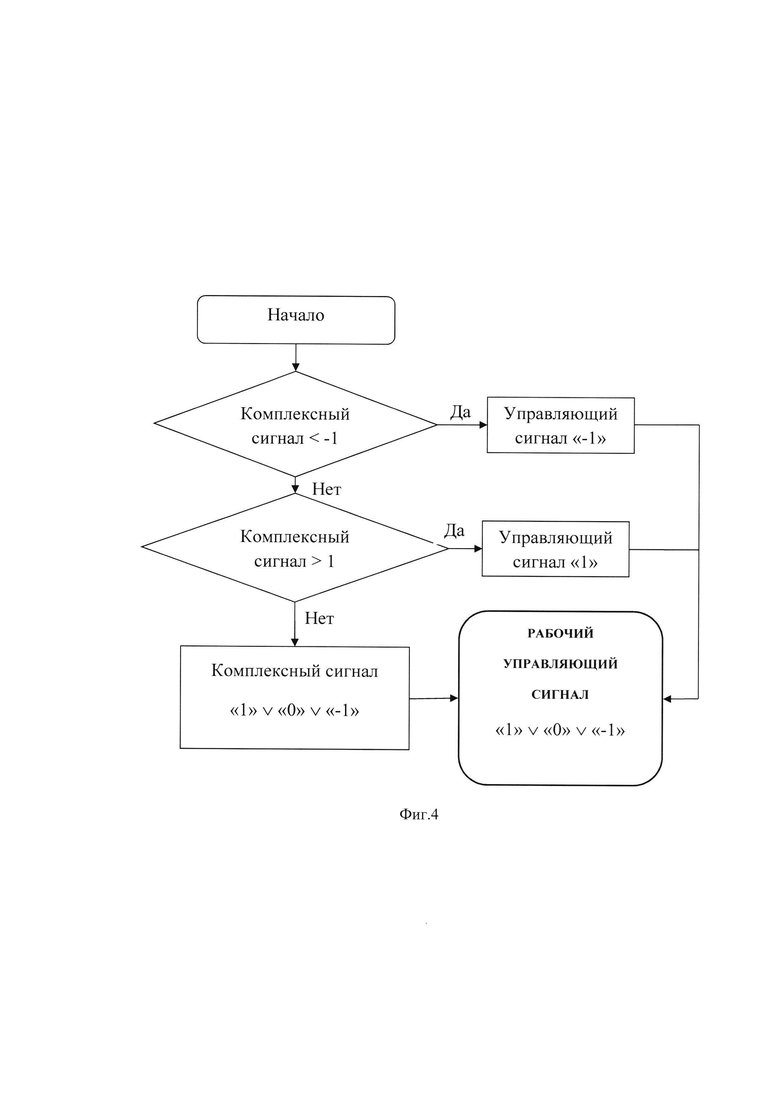
На фиг. 4 представлено формирование рабочего управляющего сигнала.
В случае если комплексный сигнал принимает значение «-2», формируется рабочий управляющий сигнал. Если комплексный сигнал принимает значение, то формируется рабочий управляющий сигнал. Если комплексный сигнал равен «0», то формируется рабочий управляющий сигнал «0». Если комплексный сигнал равен «1», то формируется рабочий управляющий сигнал «1», и если комплексный сигнал принимает значение «2», то рабочий управляющий сигнал равен «1».
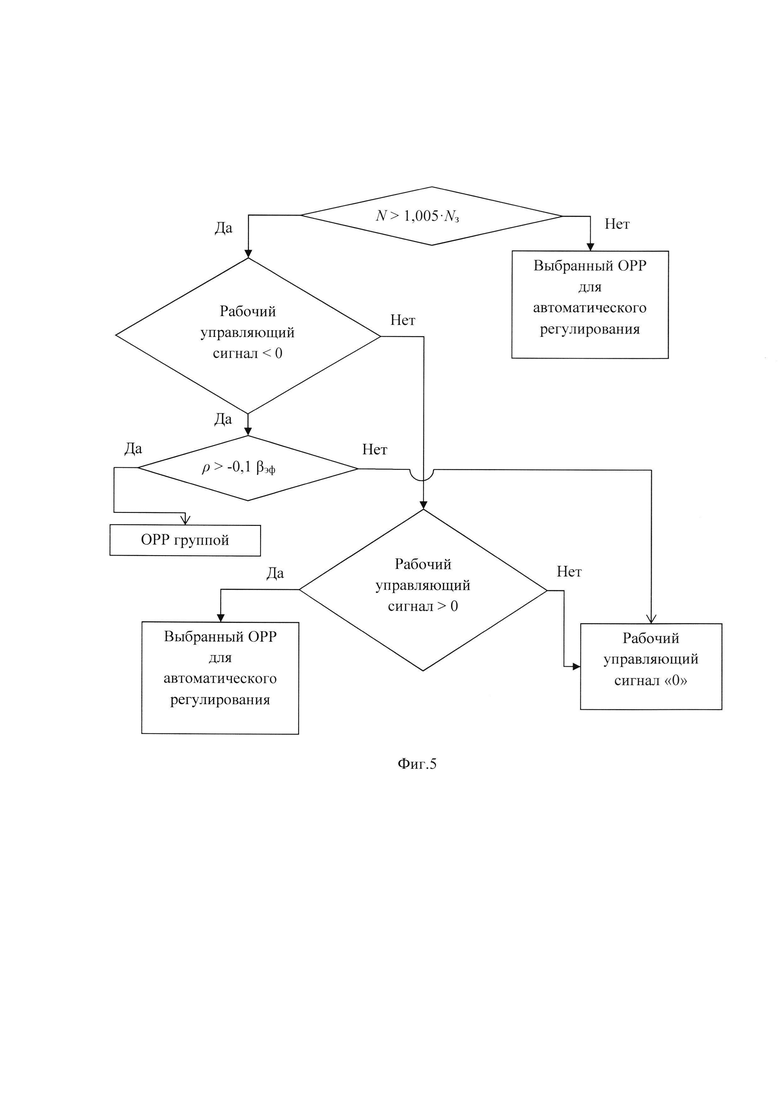
На фиг. 5 представлен способ автоматического регулирования мощностью ядерного реактора с улучшением качества переходных процессов;
ρ - измеренная реактивность ядерного реактора.
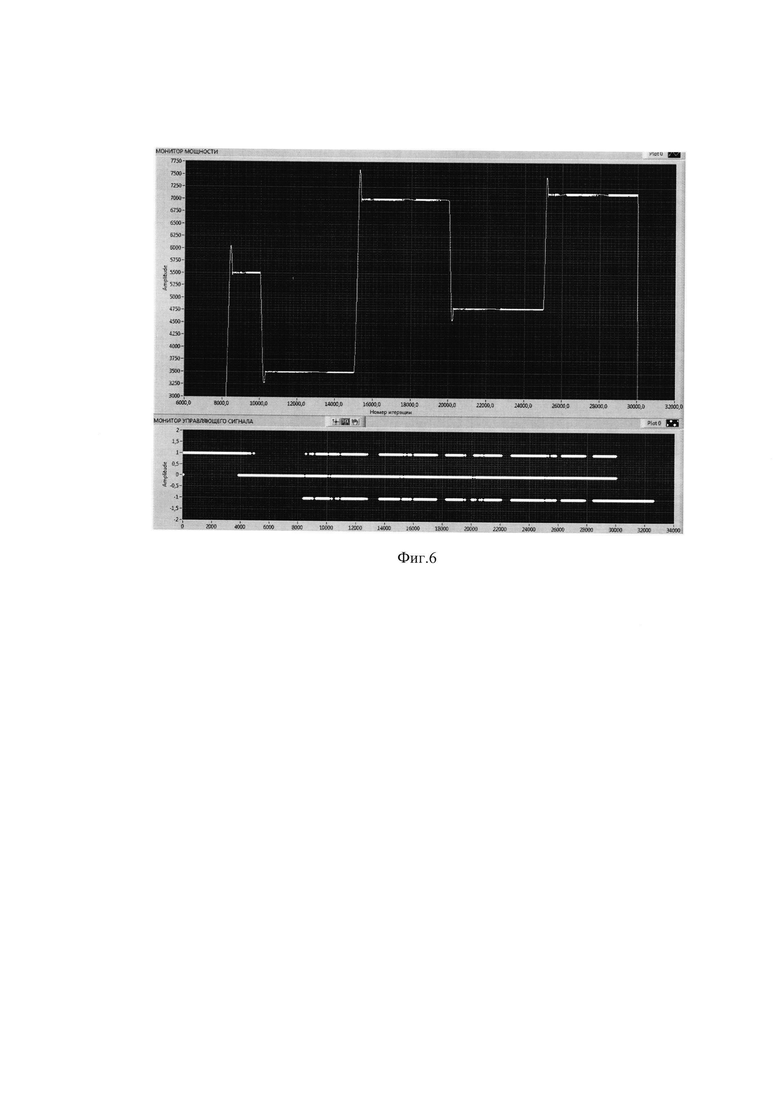
На фиг. 6 представлен график изменения мощности и управляющего сигнала при использовании способа прототипа.
Из фиг. 6 видно, что во всех переходных процессах наблюдается перерегулирование. Перерегулирование при увеличении мощности составляет порядка 10%, а при уменьшении мощности - 7%.
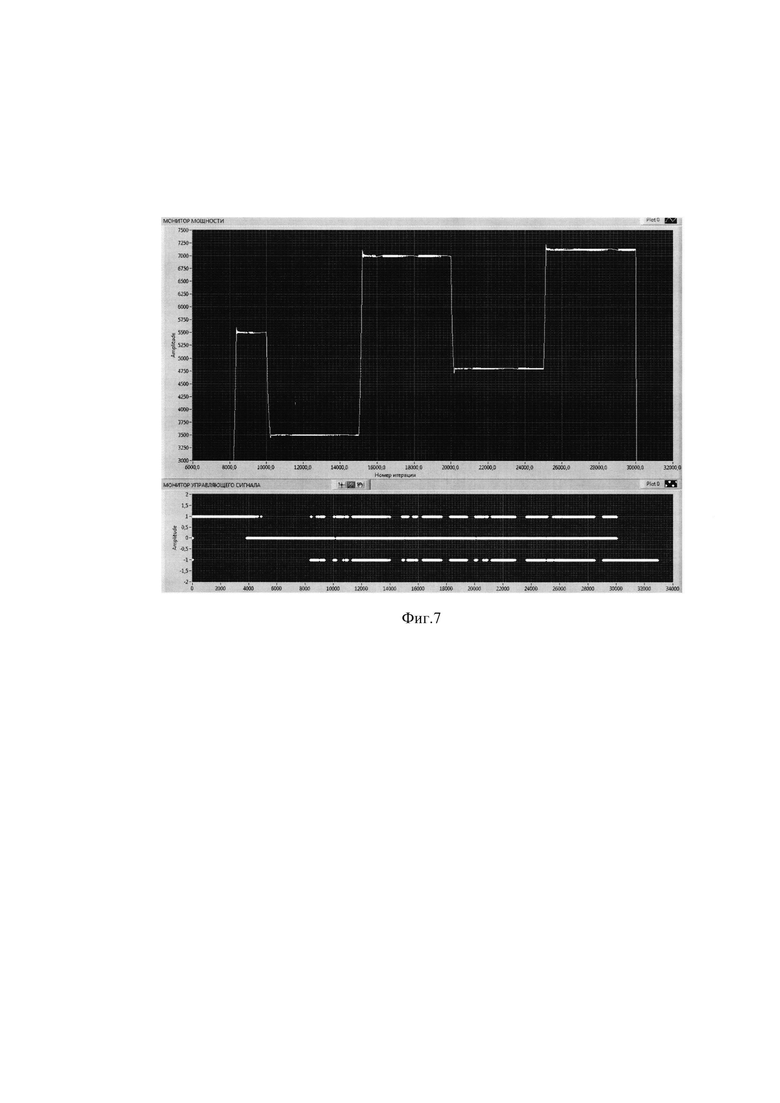
На фиг. 7 представлен график изменения мощности и управляющего сигнала при использовании заявляемого способа.
Сравнивая фиг. 6 и 7, видно улучшение качества переходных процессов (перерегулирование снизилось до ~ 2%).
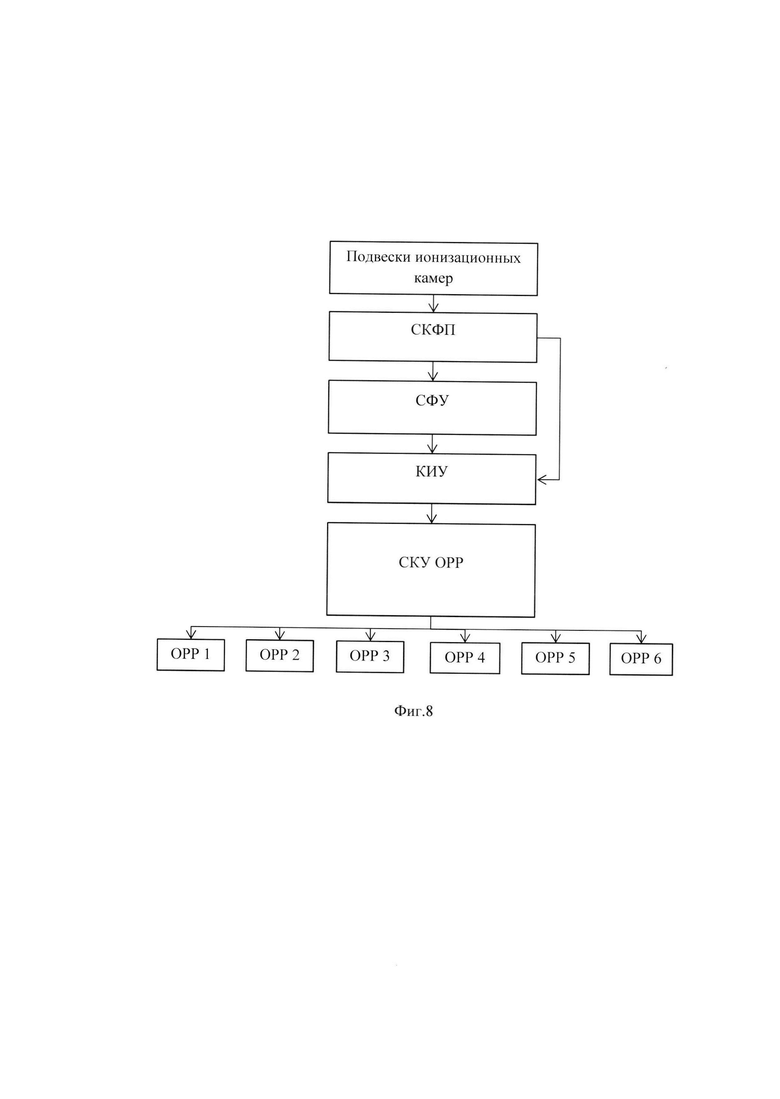
На фиг. 8 представлена блок-схема исполнения автоматического регулирования мощностью исследовательского ядерного реактора, где
СКФП - система контроля физических параметров;
СФУ - система функционального управления;
КИУ - система контроля и управления;
СКУ ОРР - система контроля и управления органов регулирования реактивности.
Осуществление изобретения
Подтверждение улучшения характеристик переходных процессов производилось на основе симуляции кинетической модели реактора, реализованной в программной среде LabView на основе одноточечной модели кинетики, с учетом обратной связи по температуре активной зоны.
Данный способ автоматического управления мощностью ядерного реактора заключается в сравнении заданного сигнала с опорным сигналом мощности и обратного периода разгона ядерного реактора. На основе выработанных сигналов по мощности и обратному периоду разгона ядерного реактора (сумма двух сигналов - комплексный сигнал), формируется рабочий управляющий сигнал (см. фиг. 1-4).
Рабочий управляющий сигнал формируется в виде значений «1», «0» или «-1», соответствующих командам перемещения органа регулирования реактивности на один элементарный шаг вверх, оставаться в прежнем положении, на один элементарный шаг вниз.
Для улучшения качества переходного процесса при увеличении заданной мощности используются несколько исполнительных механизмов органов регулирования реактивности при перемещении их в сторону уменьшения реактивности (см. фиг. 5).
Для улучшения качества переходного процесса при снижении заданной мощности используется ограничение, которое не позволяет вводить излишнюю отрицательную реактивность (перемещать орган регулирования реактивности в активную зону) при снижении заданной мощности (см. фиг. 5).
Для реализации заявляемого способа приведена блок-схема исполнения автоматического регулирования мощностью исследовательского ядерного реактора.
Подвески ионизационных камер представляют собой набор из счетчиков нейтронов и камер деления.
Система контроля физических параметров (СКФП) обеспечивает измерение и расчет основных нейтронно-физических характеристик, а так же передачу расчетных данных.
Система функционального управления (СФУ) обеспечивает передачу управляющих команд оператора и формирует команды по логическому закону управления.
Система контроля и управления (КИУ) обеспечивает принятие и анализ данных от СКФП, команд управления от СФУ, анализ возможности их исполнения и передачу на исполнение в систему контроля и управления органов регулирования реактивности (СКУ ОРР).
СКУ ОРР обеспечивает функции принятия команд управления ОРР, анализ возможности их исполнения и непосредственно их исполнения.
Таким образом, при использовании способа автоматического управления мощностью исследовательской ядерной установки качество переходных процессов улучшилось в 5 раз (перерегулирование уменьшилось в 5 раз).
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ НЕЙТРОННО-ФИЗИЧЕСКИХ ПАРАМЕТРОВ ИССЛЕДОВАТЕЛЬСКОЙ ЯДЕРНОЙ УСТАНОВКИ | 2015 |
|
RU2593389C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ПАРАМЕТРОВ ЯДЕРНОГО РЕАКТОРА | 2015 |
|
RU2589038C1 |
| СПОСОБ УПРАВЛЕНИЯ ЯДЕРНЫМ РЕАКТОРОМ | 2012 |
|
RU2482558C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МОЩНОСТЬЮ ЯДЕРНОЙ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ С РЕАКТОРОМ ВОДО-ВОДЯНОГО ТИПА | 2003 |
|
RU2278427C2 |
| СПОСОБ УПРАВЛЕНИЯ ЯДЕРНЫМ РЕАКТОРОМ | 2013 |
|
RU2529555C1 |
| СПОСОБ УПРАВЛЕНИЯ ЯДЕРНЫМ РЕАКТОРОМ | 2000 |
|
RU2190267C2 |
| Способ управления и защиты ядерного реактора на быстрых нейтронах и система для его реализации | 2022 |
|
RU2798480C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЯДЕРНОЙ РЕАКЦИЕЙ ПОДКРИТИЧЕСКОГО ЯДЕРНОГО РЕАКТОРА | 2006 |
|
RU2328780C1 |
| Многопозиционное устройство экстренного снижения мощности ядерного реактора | 2020 |
|
RU2740641C1 |
| СПОСОБ И УСТРОЙСТВО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ МОЩНОСТИ ЯДЕРНОГО РЕАКТОРА | 2003 |
|
RU2244350C2 |
Настоящее изобретение относится к способу автоматического управления мощностью исследовательской ядерной установки в переходных процессах по рабочему управляющему сигналу. Сигнал сформирован на основе суммы сигналов реакций на отклонение мощности реактора и на скорость изменения мощности реактора от заданных значений, в котором при получении управляющего сигнала на увеличение реактивности осуществляют перемещение органа регулирования. Причем при переходе с одной мощности на другую применяют разное количество органов регулирования реактивности, на этапе перехода с меньшей мощности на большую и наоборот регулирование реактивности осуществляют поочередно одним из группы органов регулирования реактивности. Количество задействованных в одном цикле органов регулирования реактивности выбирают исходя из того, чтобы обеспечить сохранение равномерности распределения поля делений в активной зоне исследовательского ядерного реактора и дополнительно на этапе перехода с меньшей мощности на большую при превышении текущей мощности порогового значения на заранее установленную величину. При получении управляющего сигнала на уменьшение реактивности сравнивают текущую величину реактивности с установленным ограничением по вводу отрицательной реактивности, и если значение превышает установленное ограничение, то осуществляют перемещение группы органов регулирования реактивности. Техническим результатом является улучшение качества переходных процессов в ходе автоматического управления мощностью исследовательского ядерного реактора. 8 ил.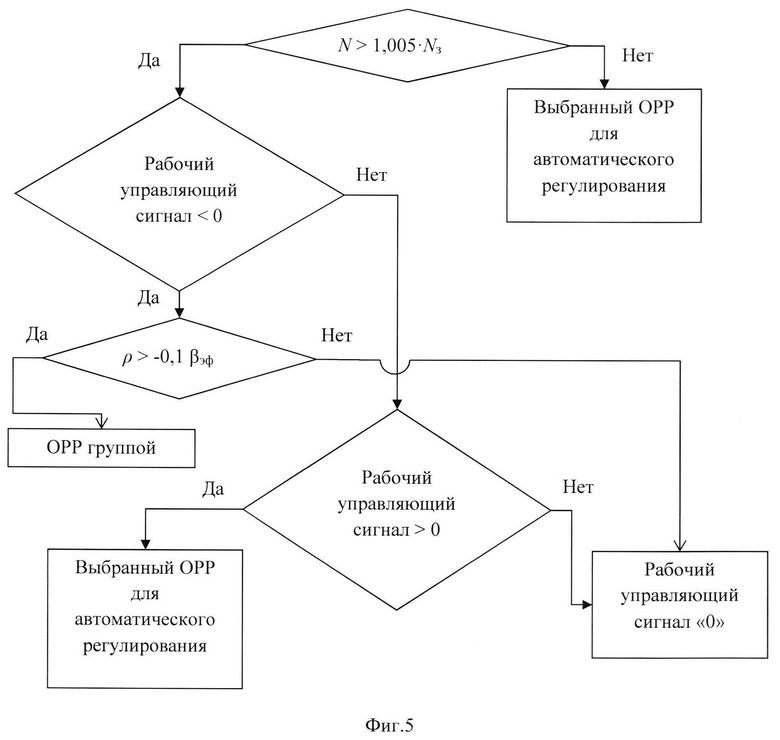
Способ автоматического управления мощностью исследовательской ядерной установки в переходных процессах по рабочему управляющему сигналу, сформированному на основе суммы сигналов отклонений мощности реактора и скорости изменения мощности реактора от заданных значений, в котором при получении управляющего сигнала на увеличение реактивности осуществляют перемещение органа регулирования реактивности, отличающийся тем, что при переходе с одной мощности на другую применяют разное количество органов регулирования реактивности, причем на этапе перехода с меньшей мощности на большую и наоборот регулирование реактивности осуществляют поочередно одним из группы органов регулирования реактивности и количество задействованных в одном цикле органов регулирования реактивности выбирают исходя из того, чтобы обеспечить сохранение равномерности распределения поля делений в активной зоне исследовательского ядерного реактора и дополнительно на этапе перехода с меньшей мощности на большую при превышении текущей мощности порогового значения на заранее установленную величину и при получении управляющего сигнала на уменьшение реактивности сравнивают текущую величину реактивности с установленным ограничением по вводу отрицательной реактивности, и если значение превышает установленное ограничение, то осуществляют перемещение группы органов регулирования реактивности.
| Алексаков Г.Н | |||
| и др | |||
| "Экспериментальное исследование оптимальных процессов управления нейтронным потоком ядерного реактора | |||
| "Атомная энергия", т | |||
| Машина для изготовления проволочных гвоздей | 1922 |
|
SU39A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Способ уравновешивания движущихся масс поршневых машин | 1925 |
|
SU427A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ПАРАМЕТРОВ ЯДЕРНОГО РЕАКТОРА | 2015 |
|
RU2589038C1 |
| US 20040114703 A1, 17.06.2004 | |||
| EP 3316262 B1, 17.02.2021 | |||
| US 10529456 B2, 07.01.2020 | |||
| EP 3443560 B1, 04.03.2020 | |||
| Способ управления и защиты ядерного реактора на быстрых нейтронах и система для его реализации | 2022 |
|
RU2798480C1 |

