Изобретение относится к области космической техники, а именно к способам ввода в действие технических средств исследования (исследовательских аппаратов), оснащенных научной аппаратурой, на планетах, обладающих атмосферой.
Известен способ ввода в действие исследовательского аппарата на планете с атмосферой, который предусматривает использование в качестве технического средства исследования - беспилотный летательный аппарат (БПЛА) вертолетного типа соосной схемы. Согласно этому способу данное техническое средство доставляется на поверхность планеты в составе другого технического средства (планетохода), после чего оно вводится в действие, отделяясь от планетохода, и выполняет программу исследовательских действий [J. Balaram, MiMi Aung, Matthew P. Golombek. The Ingenuity Helicopter on the Perseverance Rover. Space Science Reviews, 2021, 217 (56), 11 p.].
Недостатками известного способа являются:
- зависимость процесса ввода в действие от успешного развертывания (посадки) другого технического средства, то есть ввод в действие осуществляется с планетохода после входа в атмосферу и посадки на поверхность планеты. В случае нештатной ситуации при посадке авария планетохода приведет к утере установленного на нем исследовательского аппарата, а следовательно, к провалу всей исследовательской миссии;
- область ввода в действие исследовательского аппарата ограничена местом посадки планетохода, на который установлен данный исследовательский аппарат, т.е. ввод в действие возможен только у поверхности исследуемой планеты.
Известен также способ ввода в действие исследовательского аппарата на планете с атмосферой, в котором в качестве такого исследовательского аппарата применяется аэростатный зонд (АЗ), оснащенный научно-измерительной аппаратурой. Согласно этому способу в процессе спуска спускаемого аппарата (СА) в атмосфере осуществляется отделение от него системы аэростатного зонда (САЗ) и ввод в действие самого АЗ в заданных слоях атмосферы (на заданную высоту дрейфа) [Москаленко Г.М. Механика полета в атмосфере Венеры. М.: Машиностроение, 1978, с.224-225; Автоматические космические аппараты для фундаментальных и прикладных научных исследований / Под общ. ред. д-ра техн. наук, проф. Г.М. Полищука и д-ра техн. наук, проф. К.М. Пичхадзе. М.: Изд-во МАИ-ПРИНТ, 2010, с.260-261, 275-277].
Данный способ, известный из работ [Москаленко Г.М. Механика полета в атмосфере Венеры. М.: Машиностроение, 1978, с.224-225; Автоматические космические аппараты для фундаментальных и прикладных научных исследований / Под общ. ред. д-ра техн. наук, проф. Г.М. Полищука и д-ра техн. наук, проф. К.М. Пичхадзе. М.: Изд-во МАИ-ПРИНТ, 2010, с.260-261, 275-277], наиболее близок к предлагаемому.
Данный способ, по сравнению с предыдущим, обеспечивает независимость процесса ввода в действие исследовательского аппарата (АЗ) в атмосфере планеты от ввода других технических средств исследовательской экспедиции путем разделения в пространстве операций по вводу в действие этих технических средств.
Однако недостатком данного наиболее близкого способа является то, что ввод в действие АЗ осуществляется только лишь в единственном диапазоне высот, после чего АЗ совершает неуправляемое движение (дрейф) в атмосфере на определенной высоте, что ограничивает область проведения эксперимента (сбора научных данных о планете), а, следовательно, и объем получаемой информации.
Технический результат, достигаемый предлагаемым изобретением, заключается в расширении схемы эксперимента по контактному изучению атмосферы и поверхности планет путем включения в состав экспедиции дополнительного технического средства исследования (исследовательского аппарата) в виде беспилотного летательного аппарата, расширении области проводимых исследований на планете посредством возможности ввода таких беспилотных летательных аппаратов на разные высоты и их разведения (разлета) на разную дальность, возможности получить дополнительные научные данные во время спуска в атмосфере в процессе ввода в действие, что позволит повысить вероятность успешного проведения научных измерений, увеличить объем получаемых научных данных и получить качественно новую информацию о планете вне зависимости от успешного развертывания других технических средств. Увеличение количества технических средств исследования (исследовательских аппаратов) в составе экспедиции и способность беспилотного летательного аппарата совершать управляемое движение расширит возможности и улучшит технологию проведения эксперимента, приведет к увеличению общей продолжительности пребывания исследовательских аппаратов на планете, а, следовательно, к дополнительному увеличению объема получаемых научных данных о планете.
Технический результат в предлагаемом способе достигается, в отличие от известного наиболее близкого к нему, в частности, посредством использования дополнительного технического средства исследования в виде мультироторного летательного аппарата (МРЛА), который относится к классу беспилотных летательных аппаратов вертикального взлета и посадки с силовой установкой, выполнен по мультикоптерной схеме, имеет полезную нагрузку в виде камеры и прочей научной аппаратуры, устанавливается в спускаемом аппарате и вводится в действие в атмосфере планеты. Такие исследовательские аппараты будут функционировать определенное время в заданных эшелонах высот (зонах).
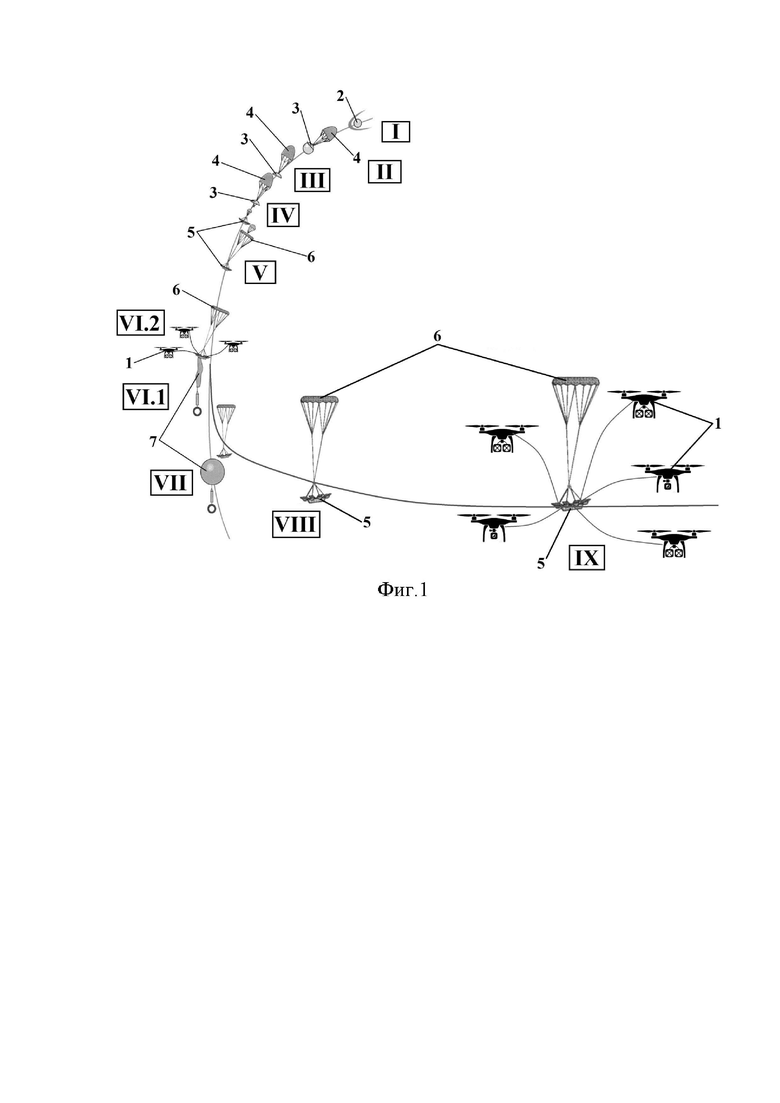
Заявляемое изобретение поясняется фиг.1, на которой изображена схема ввода в действие мультироторного летательного аппарата в атмосфере исследуемой планеты, на которой обозначено:
1 - мультироторный летательный аппарат (МРЛА);
2 - спускаемый аппарат (СА);
3 - верхняя полусфера спускаемого аппарата;
4 - парашют увода;
5 - система аэростатного зонда (САЗ);
6 - парашют ввода;
7 - аэростатный зонд,
а также показаны следующие стадии:
I - предшествующая предлагаемому способу стадия, когда полет исследовательского аппарата (МРЛА) происходит в составе спускаемого аппарата (поз. 2), который должен доставить МРЛА в составе системы аэростатного зонда (поз. 5) к исследуемой планете;
II - ввод парашюта увода (поз. 4);
III - увод верхней полусферы спускаемого аппарата (поз. 3);
IV - сброс системы аэростатного зонда (поз. 5);
V - ввод парашюта ввода (поз. 6);
VI.1 - развертывание и наполнение оболочки аэростатного зонда (поз. 7);
VI.2 - развертывание и наполнение оболочки аэростатного зонда (поз. 7) и ввод в действие МРЛА (поз. 1) путем отделения от САЗ;
VII - отделение (ввод) АЗ (поз. 7) от САЗ; движение САЗ (поз. 5), на которой установлены МРЛА (поз. 1), на парашюте ввода (поз. 6);
VIII - отлет САЗ (поз. 5), на которой установлены МРЛА (поз. 1), на парашюте ввода (поз. 6) на безопасное расстояние;
IX - ввод в действие МРЛА (поз. 1) в атмосфере планеты путем отделения от системы аэростатного зонда (поз. 5).
В атмосферу исследуемой планеты вводят спускаемый аппарат (поз. 2). Начало процесса ввода МРЛА (поз. 1) происходит совместно с процессом ввода АЗ (поз. 7). Операции ввода АЗ и МРЛА начинаются с момента отделения на парашюте увода (поз. 4) верхней полусферы СА (поз. 3), в которой закреплена система аэростатного зонда (поз. 5). После увода верхней полусферы СА осуществляется сброс системы аэростатного зонда, в которой расположены МРЛА и АЗ. Затем во время спуска САЗ вводится парашют ввода (поз. 6), который обеспечивает торможение САЗ до необходимых условий, позволяющих начать ввод АЗ и МРЛА.
Ввод в действие мультироторного летательного аппарата в атмосфере планеты происходит путем отделения от системы аэростатного зонда после ввода аэростатного зонда (стадия IX). Т.е. после стабилизации САЗ на парашюте ввода происходит наполнение оболочки аэростатного зонда подъемным газом и ее отделение от САЗ. Система аэростатного зонда на парашюте продолжает движение в атмосфере и после отлета на безопасное расстояние происходит ввод в действие МРЛА путем отделения их от САЗ (либо всех МРЛА единовременно, либо поэтапно (с задержкой по времени) и/или на разные высоты). Система разделения должна обеспечить безударное расхождение мультироторного летательного аппарата с системой аэростатного зонда и их относительное движение. Далее система управления обеспечивает стабилизацию МРЛА и возвращение его в положение равновесия с помощью включения двигателей силовой установки. После стабилизации мультироторный летательный аппарат выходит на номинальный режим полета на потребную высоту для осуществления заложенной программы исследования посредством установленного полезного груза (научной аппаратуры, камер и проч.). По завершении стадии активного полета и проведения исследования полученные данные ретранслируются, например, с помощью других технических средств, входящих в состав экспедиции (посадочный аппарат, аэростатный зонд или орбитальный модуль).
Ввод в действие мультироторного летательного аппарата в атмосфере планеты также может быть осуществлен одновременно с вводом аэростатного зонда до его отделения от САЗ - на этапе развертывания и наполнения оболочки АЗ (стадия VI.2). Дальнейшие операции аналогичны изложенным в предыдущем случае.
Осуществлению предлагаемого способа предшествуют доставка исследовательского аппарата - МРЛА к исследуемой планете и движение в ее атмосфере с помощью спускаемого аппарата согласно схеме эксперимента (см. фиг. 1: поз. 2, стадия I).
Список литературы
1. J. Balaram, MiMi Aung, Matthew P. Golombek. The Ingenuity Helicopter on the Perseverance Rover. Space Science Reviews, 2021, 217 (56), 11 p. https://doi.org/10.1007/s11214-021-00815-w
2. Москаленко Г.М. Механика полета в атмосфере Венеры. М.: Машиностроение, 1978, с. 224-225.
3. Автоматические космические аппараты для фундаментальных и прикладных научных исследований / Под общ. ред. д-ра техн. наук, проф. Г.М. Полищука и д-ра техн. наук, проф. К.М. Пичхадзе. М.: Изд-во МАИ-ПРИНТ, 2010, с. 260-261, 275-277.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для доставки исследовательских аппаратов в атмосферу планеты | 2024 |
|
RU2829878C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛЕТОМ ИССЛЕДОВАТЕЛЬСКОГО АППАРАТА В АТМОСФЕРЕ ПЛАНЕТЫ | 2009 |
|
RU2402467C1 |
| МНОГОЦЕЛЕВАЯ АЭРОСТАТНАЯ СИСТЕМА УСКОРЕННОГО ВЫВОДА НА ЗАДАННУЮ ВЫСОТУ | 2013 |
|
RU2526633C1 |
| СПОСОБ ПАРАШЮТНОЙ ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С ЭЛЕКТРОДВИЖИТЕЛЕМ И ПАРАШЮТНОЙ СИСТЕМОЙ ПОСАДКИ | 2014 |
|
RU2592963C2 |
| АЭРОСТАТНЫЙ РАКЕТНО-КОСМИЧЕСКИЙ КОМПЛЕКС | 2019 |
|
RU2750558C2 |
| КОСМИЧЕСКИЙ АППАРАТ | 2004 |
|
RU2271965C2 |
| УЧЕБНЫЙ НАБОР-КОНСТРУКТОР ДЛЯ ИЗУЧЕНИЯ КОНСТРУКЦИИ И АЭРОДИНАМИКИ ПОЛЁТА МУЛЬТИРОТОРНОГО БЕСПИЛОТНОГО АППАРАТА | 2024 |
|
RU2836491C1 |
| Возвращаемый с околоземной орбиты научно-исследовательский космический аппарат | 2015 |
|
RU2634608C2 |
| Способ определения усредненных значений метеорологических параметров в пограничном слое атмосферы | 2019 |
|
RU2727315C1 |
| Способ определения физико-механических и морфометрических характеристик ледовых торосистых образований | 2019 |
|
RU2730003C1 |
Изобретение относится к области космической техники, а именно к способам ввода в действие исследовательских аппаратов в атмосфере исследуемой планеты. Для этого беспилотный летательный аппарат размещают в системе аэростатного зонда, доставляют на исследуемую планету в составе спускаемого аппарата и вводят в действие в атмосфере путем отделения от движущейся на парашюте системы аэростатного зонда. Достигается расширение области проводимых исследований на планете, возможности получить дополнительные научные данные во время спуска в атмосфере. 5 з.п. ф-лы, 1 ил.
1. Способ ввода в действие исследовательского аппарата в атмосфере исследуемой планеты, заключающийся в доставке исследовательского аппарата в атмосферу планеты, отличающийся тем, что в качестве такого исследовательского аппарата используют по крайней мере один беспилотный летательный аппарат, который размещают в системе аэростатного зонда, доставляют на исследуемую планету в составе спускаемого аппарата и вводят в действие в атмосфере путем отделения от движущейся на парашюте системы аэростатного зонда.
2. Способ по п.1, отличающийся тем, что в качестве исследовательского аппарата используют мультироторный летательный аппарат с исследовательским оборудованием – беспилотный летательный аппарат вертикального взлета и посадки с силовой установкой, выполненный по мультикоптерной схеме.
3. Способ по п.1, отличающийся тем, что ввод в действие исследовательского аппарата путем отделения от системы аэростатного зонда осуществляют после ввода аэростатного зонда.
4. Способ по п.1, отличающийся тем, что ввод в действие исследовательского аппарата путем отделения от системы аэростатного зонда осуществляют одновременно с вводом аэростатного зонда.
5. Способ по п.1, отличающийся тем, что используют несколько исследовательских аппаратов и ввод их в действие осуществляют одновременно путем отделения от системы аэростатного зонда.
6. Способ по п.1, отличающийся тем, что используют несколько исследовательских аппаратов и ввод их в действие осуществляют поочередно на различной высоте путем отделения от системы аэростатного зонда.
| СПОСОБ УПРАВЛЕНИЯ ПОЛЕТОМ ИССЛЕДОВАТЕЛЬСКОГО АППАРАТА В АТМОСФЕРЕ ПЛАНЕТЫ | 2009 |
|
RU2402467C1 |
| Аэростатический зонд для исследования планет | 1986 |
|
SU1467904A1 |
| US 7844218 B2, 30.11.2010 | |||
| АЭРОСТАТНО-КОСМИЧЕСКАЯ ЭНЕРГЕТИЧЕСКАЯ СИСТЕМА (АКЭС) | 2019 |
|
RU2733181C1 |
| МНОГОРАЗОВЫЙ ГИБРИДНЫЙ РАКЕТОНОСИТЕЛЬ КРИШТОПА (МГРК), ГИБРИДНАЯ СИЛОВАЯ УСТАНОВКА (ГСУ) ДЛЯ МГРК И СПОСОБ ФУНКЦИОНИРОВАНИЯ МГРК С ГСУ (ВАРИАНТЫ) | 2022 |
|
RU2772596C1 |

