Изобретение относится к способам и устройствам, обеспечивающим вертикальную посадку беспилотных летательных аппаратов с помощью парашютных систем.
Известна технология парашютной посадки БЛА с устройством парашютной системы (патент РФ №2456211, B64D 17/80, 2012.07.20), в соответствии с которой поворотные консоли крыла БЛА закреплены на его центроплане посредством шарниров и замков-фиксаторов. В полетном положении консоли крыла фиксируются замками-фиксаторами, которые на посадке приводятся в движение редуктором исполнительного привода системы управления БЛА и консоли крыла при раскрытии купола парашюта шарнирно перемещаются вместе с куполом вверх.
Основными недостатками данной технологии посадки БЛА с помощью парашютной системы является то, что БЛА после приземления даже со сложенными консолями крыла может волочиться по площадке приземления под действием парусности парашюта, т.е. все его части могут получать удары и повреждения, включая хвостовое оперение и полезную нагрузку. К тому же БЛА приземляется на днище фюзеляжа с дорогой полезной нагрузкой, которую необходимо или демпфировать от удара, или минимизировать вертикальную скорость снижения увеличением площади купола парашюта, что увеличит его парусность. При этом механизм складывания консолей крыла и укладывания парашютной системы в крыле вдоль его размаха только существенно усложняет конструкцию такого БЛА.
Известен способ парашютной посадки БЛА с устройством освобождения парашюта от БЛА (патент США №8191831, B64D 17/00, B64D 17/54, 2012.06.05), которое по команде его системы управления посредством сервопривода открывает замок удерживания соединительного узла подвесной системы парашюта, вследствие чего он отделяется от приземлившегося БЛА и складывает купол, что предотвращает негативное воздействие его парусности.
Основным недостатком такой парашютной посадки БЛА является то, что команда на отделение парашюта от БЛА должна быть выполнена немедленно после приземления БЛА, что может реализовываться или при визуальном контроле оператора, или автоматически от удара приземления, что противоречит необходимости демпфирования полезной нагрузки БЛА. Это существенно усложняет конструкцию и эксплуатацию соответственно необходимостью обязательной посадки вблизи оператора, что возможно не часто, да и вообще проблематично в ветер. Или необходимо оборудовать БЛА автоматической сенсорной системой срабатывания отделения парашюта от удара приземления. Все это снижает надежность и ограничивает эксплуатационные возможности БЛА.
Наиболее близким аналогом (прототипом) предлагаемого изобретения является способ посадки разведывательного БЛА с применением парашюта (патент США №2014151508 (A1), B64D 1/08, 2014.06.05), в соответствии с которым при посадке от БЛА отделяют контейнер с аккумуляторными батареями и полезной нагрузкой и спускают на парашюте в перевернутом положении. При этом планер БЛА переводят в снижение по глиссаде планирования и приземляют скольжением на днище фюзеляжа в отдельном месте посадочной площадки.
Недостатками прототипа являются отсутствие вышеуказанного предохранения от воздействия парусности парашюта на приземлившейся контейнер, тем более, что он без демпфирования, след-но для минимизации скорости его снижения площадь миделя купола парашюта должна быть максимизирована, что существенно повышает актуальность проблемы парусности.
Глиссада планирования планера БЛА требует обеспечения незаграможденного земного пространства для приземления, т.е. без препятствий для его планирующего полета. В противном случае при горизонтальной скорости планирования БЛА в 50 км/ч неизбежно повреждение крыла от столкновения даже с небольшим препятствием, что само по себе существенно ограничивает возможности необходимостью подбора посадочной площадки соответствующих размеров и с отсутствием кустарника или других препятствий.
К тому же само приземление планера БЛА скольжением на днище фюзеляжа также требует незаграможденного земного пространства с мягким грунтом.
После сброса контейнера для обеспечения планирования не должна происходить перебалансировка планера БЛА, что накладывает ограничения на его конструкцию.
Помимо этого сбрасывать контейнер с БЛА приходится на скорости 120 км/ч в режиме горизонтального полета, что снижает точность его приземления. При этом контейнер и планер БЛА приземляются в отдалении друг от друга, что увеличивает время и затрудняет обслуживание. Все эти сложности только усугубляются в условиях ветреной погоды, что существенно снижает надежность и эффективность БЛА.
Целью настоящего изобретения является обеспечение высоконадежной эффективной технологии парашютной посадки БЛА.
Поставленная цель достигается тем, что в способе посадки БЛА, включающем снижение скорости БЛА, сброс с него отделяемой части, раскрытие парашюта и последовательное приземление отделяемой части и самого БЛА в месте посадки, при раскрытии парашюта с подвесной системой для БЛА с него сбрасывают установленное на свободном конце посадочного фала якорное устройство, с помощью которого разворачивают фал вниз и производят его якорение на месте посадки при приземлении. После этого связку БЛА с парашютом переводят в режим снижения привязного аэродинамического носителя (ПАН) подобно снижению кайта или «воздушного змея». Для этого поддерживают необходимое натяжение посадочного фала и стабилизируют взаимоположение с ним БЛА и парашюта до приземления для поддерживания необходимого угла атаки парашюта и выставления его против ветра. После приземления их взаимоположение стабилизируют фиксацией на месте посадки растянутой вдоль ветра связки якоря, фала, БЛА и парашюта для предотвращения от переворачиваний и ударов от действия возможной парусности парашюта.
Отделяемая часть БЛА может быть соединенной посредством гибкого упругого элемента с посадочным фалом и их связку разворачивают вниз в процессе снижения отделяемой части под действием ее веса. После этого ее тормозят растяжением упругого элемента, при этом путем обратного его упругого сокращения поддерживают натяжение фала после его якорения и парашюта. К тому же, с помощью гибкой двухповодковой уздечки, соединяющей фал с двумя консолями крыла, стабилизируют взаимоположение с ним БЛА и парашюта ориентацией проекций их осей симметрии вдоль направления ветра.
Для парашютной посадки БЛА могут использовать крестообразный парашют, при этом взаимоположение его с фалом стабилизируют при Х-образной ориентации проекции купола парашюта на продольную ось БЛА.
Для парашютной посадки БЛА могут использовать вращающийся парашют, стропы которого соединены с подвесной системой БЛА посредством вертлюга, при этом взаимоположение парашюта с фалом стабилизируют при двухточечном соединении фала к БЛА вдоль его поперечной оси посредством двухповодковой уздечки.
Для парашютной посадки БЛА могут использовать планирующий парашют, при этом натяжение посадочного фала поддерживают с борта БЛА.
Растяжение упругого элемента может быть ограничено гибким ограничителем с последовательно установленными нем и посадочном фале гибкими петлями. С отделяемой части БЛА может быть развернута самозатягивающаяся гибкая петля, при этом якорение посадочного фала производят последовательными тралением и захватом неровностей на месте посадки.
Сбрасываемый контейнер с электрическими аккумуляторными батареями (АКБ) и БЛА могут быть снабжены направленными вниз штырьками, с помощью которых осуществляют дополнительное якорение фала ударным вбиванием штырьков в грунт места посадки при приземлении контейнера и БЛА, при этом амортизируют их посадочную энергию.
Контейнер может быть снабжен электролебедкой для посадочного фала с тяговым усилием, не превышающим вес контейнера, с помощью веса которого при его сбросе посредством фала раскладывают шарнирно установленную на БЛА посадочную рессору. Работой рессоры демпфируют приземление БЛА и стабилизируют взаимоположение с фалом БЛА и парашюта до и после приземления, при этом электролебедку включают при отделении контейнера.
Момент сброса контейнера может быть рассчитан для приземления его в заданном месте посадки, при этом перед раскрытием парашюта снижают высоту и скорость полета БЛА.
БЛА может быть выполнен в виде самолета, при этом при сбросе с него контейнера и перед раскрытием парашюта самолет переводят в режим набора высоты с выключенным движителем до потери скорости.
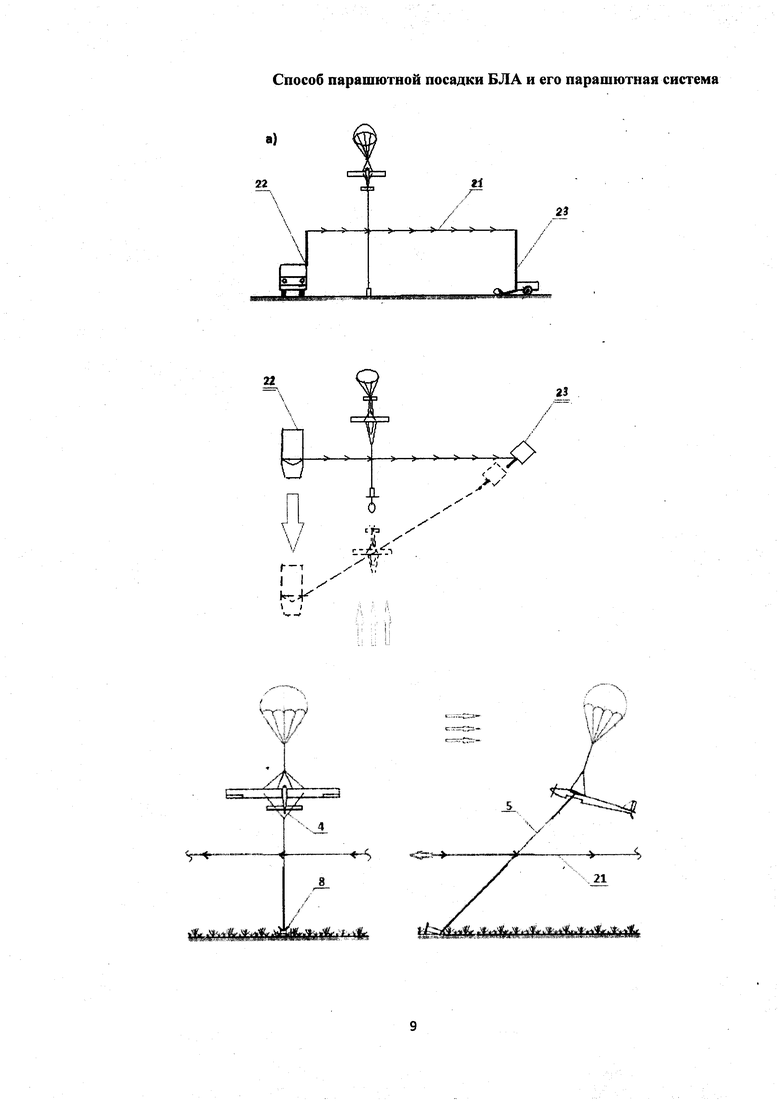
В заданном месте посадки может быть расположено устройство захвата в виде растянутой на заданном месте сети, на которую приземляют якорное устройство и зацепляют его там, при этом якорение фала осуществляют посредством сети.
Сеть может быть растянута в виде маскировки над транспортным средством, перемещением которого осуществляют наведение сети для точного попадания в нее контейнера, после чего производят там якорение посадочного фала, при этом путем его подтягивания электролебедкой контейнера приводят БЛА к посадке в сеть.
При парашютной посадке от БЛА могут быть отделены несколько модулей контейнера с электрическими аккумуляторными батареями, последовательно соединенных с посадочным фалом по типу гирлянды и снабженных раскладными якорными блоками, при этом с их помощью амортизируют посадочную энергию модулей и производят последовательное якорение фала в нескольких точках.
При сбросе отделяемой части БЛА с нее может быть раскрыт парашютик, посредством которого аэродинамически тормозят ее снижение, при этом посредством парашютика осуществляют дополнительное якорение фала при приземлении.
При сбросе отделяемой части БЛА с нее могут быть развернуты петлеобразные ленточные стриммеры, посредством которых аэродинамически тормозят ее снижение, при этом посредством стримеров осуществляют дополнительное якорение фала при приземлении.
Момент сброса контейнера с БЛА может быть рассчитан для приземления его в заданном месте посадки, где над местом посадки между транспортным средством и стойкой с подвижной опорой предварительно растягивают горизонтальный гибкий элемент с крючками. При этом якорение посадочного фала осуществляют его перехлестыванием и зацеплением одним из крючков при тралении круговым поворотом гибкого элемента против ветра вокруг стойки буксированием транспортным средством.
При парашютной посадке БЛА самолетного типа его могут переводить в режим набора высоты с выключенным движителем, раскрывать парашют и с помощью его аэродинамического усилия БЛА переворачивать на 180 градусов. При этом отделение контейнера производят от действия на него центробежной силы в процессе поворота связки парашюта с БЛА над заданным местом посадки, где БЛА приземляют на его верхнюю поверхность.
Предлагаемый способ парашютной посадки иллюстрируется чертежами, на которых изображены:
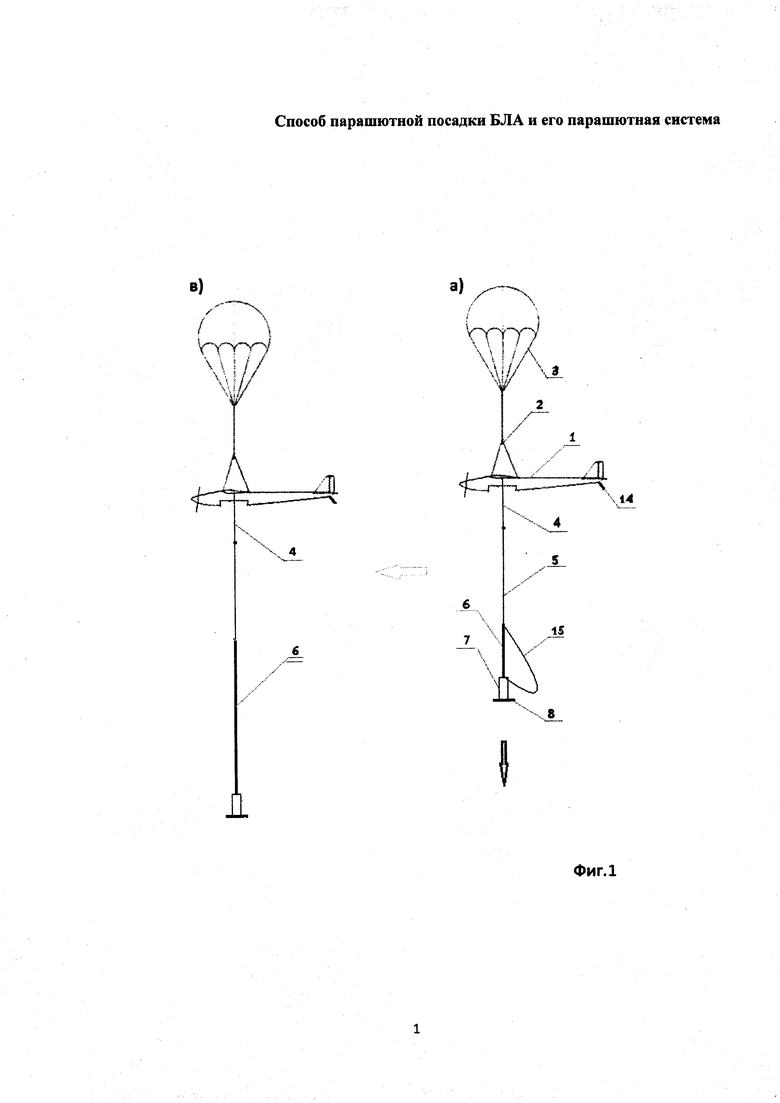
на фиг. 1а и фиг. 1в - схема варианта парашютной посадки БЛА с разворачиванием с него посадочного фала посредством контейнера с электрическими аккумуляторными батареями при раскрытии посадочного парашюта и снижении с растяжением упругого элемента;
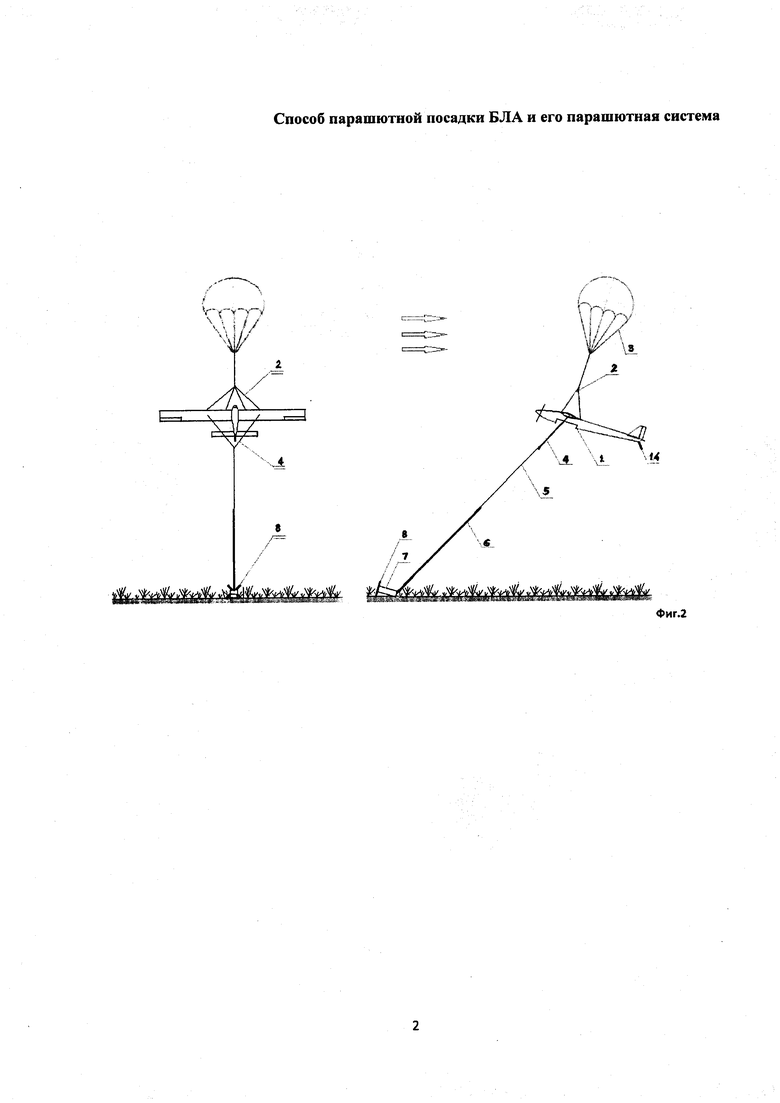
на фиг. 2 - схема варианта парашютной посадки БЛА с якорением посадочного фала посредством контейнера при его приземлении и поддерживания натяжения фала для стабилизации взаимоположения с ним связки БЛА с парашютом;
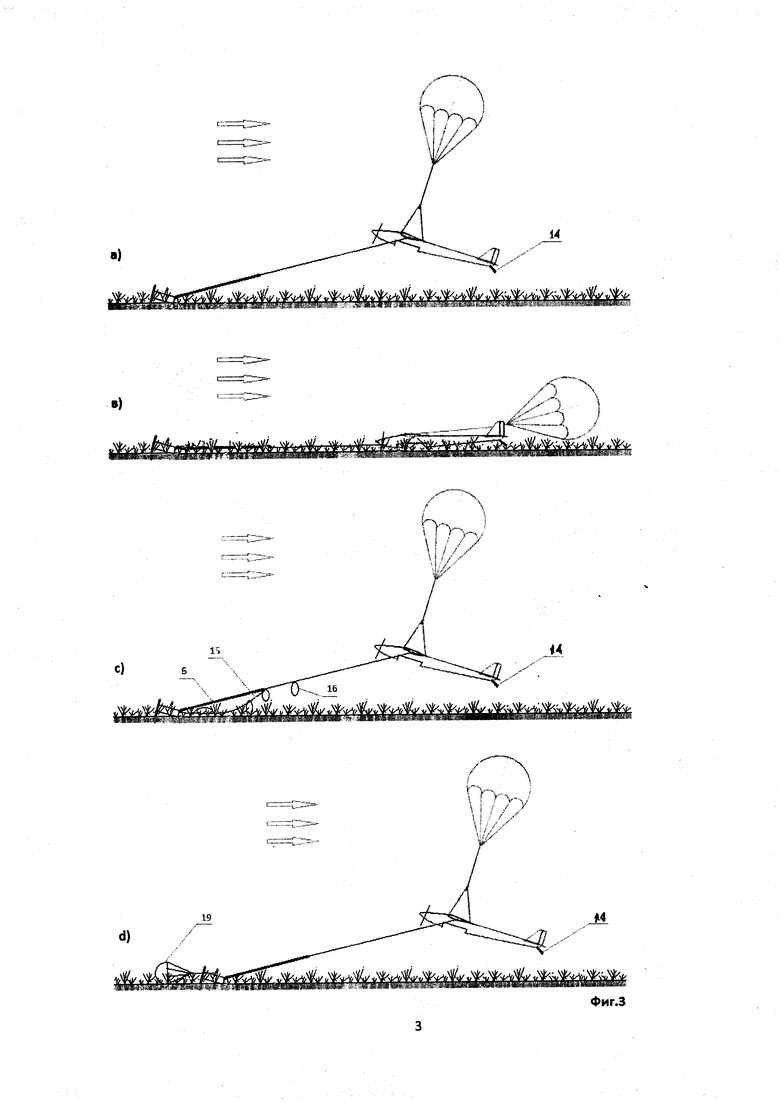
на фиг. 3а и фиг. 3в - схема варианта парашютной посадки БЛА с якорением посадочного фала посредством контейнера после его приземления и посадки БЛА;
на фиг. 3с - схема варианта парашютной посадки БЛА с дополнительным якорением посадочного фала посредством гибкого ограничителя упругого элемента и петлями путем траления с захватом неровностей на месте посадки;
на фиг. 3d - схема варианта парашютной посадки БЛА с дополнительным якорением посадочного фала посредством парашютика и якорных демпфирующих штырьков для ударного вбивания в грунт поверхности посадки при приземлении;
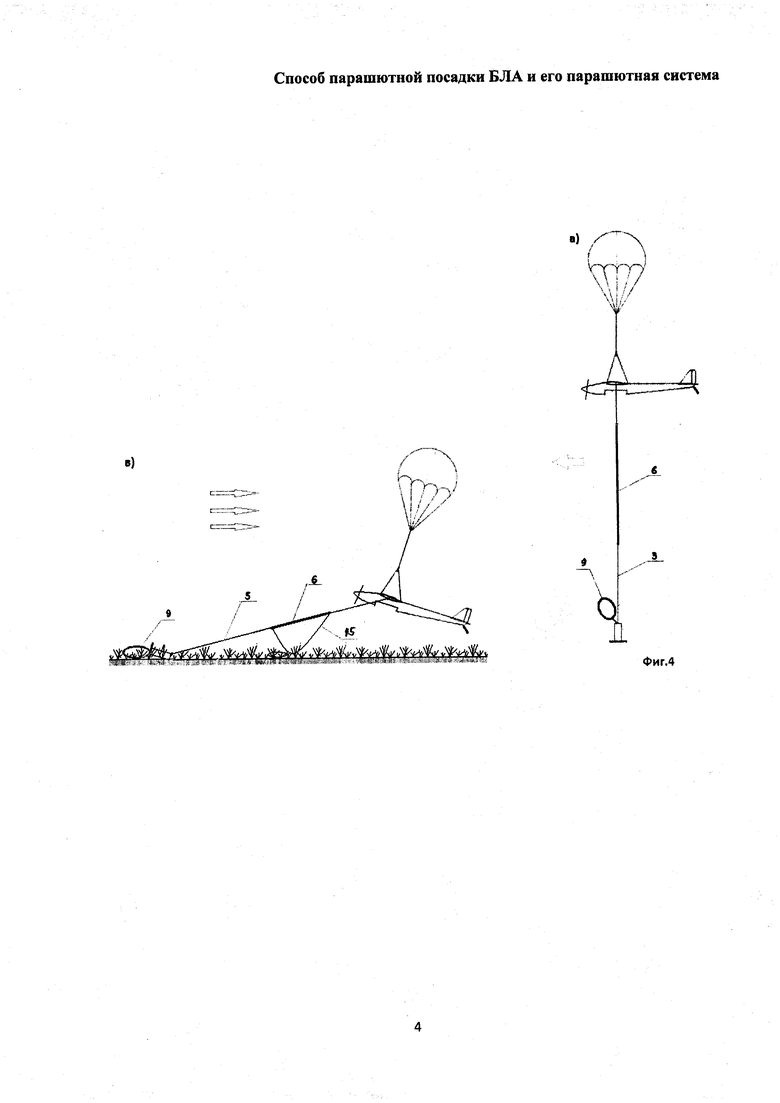
на фиг. 4а и фиг. 4в - схема варианта парашютной посадки БЛА с разворачиванием с него посадочного фала посредством контейнера с ленточным кольцеобразным стриммером и схема якорения посадочного фала посредством него;
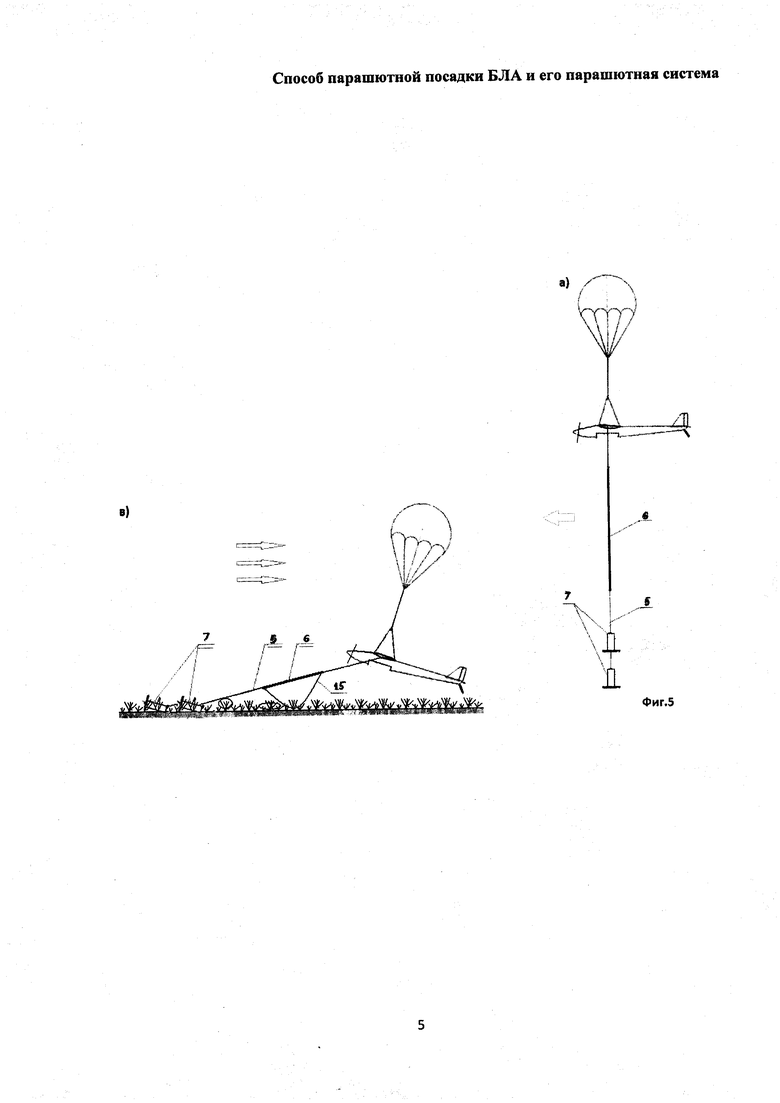
на фиг. 5а и фиг. 5в - схема варианта парашютной посадки БЛА с разворачиванием с него посадочного фала посредством нескольких модулей контейнера с аккумуляторными батареями;
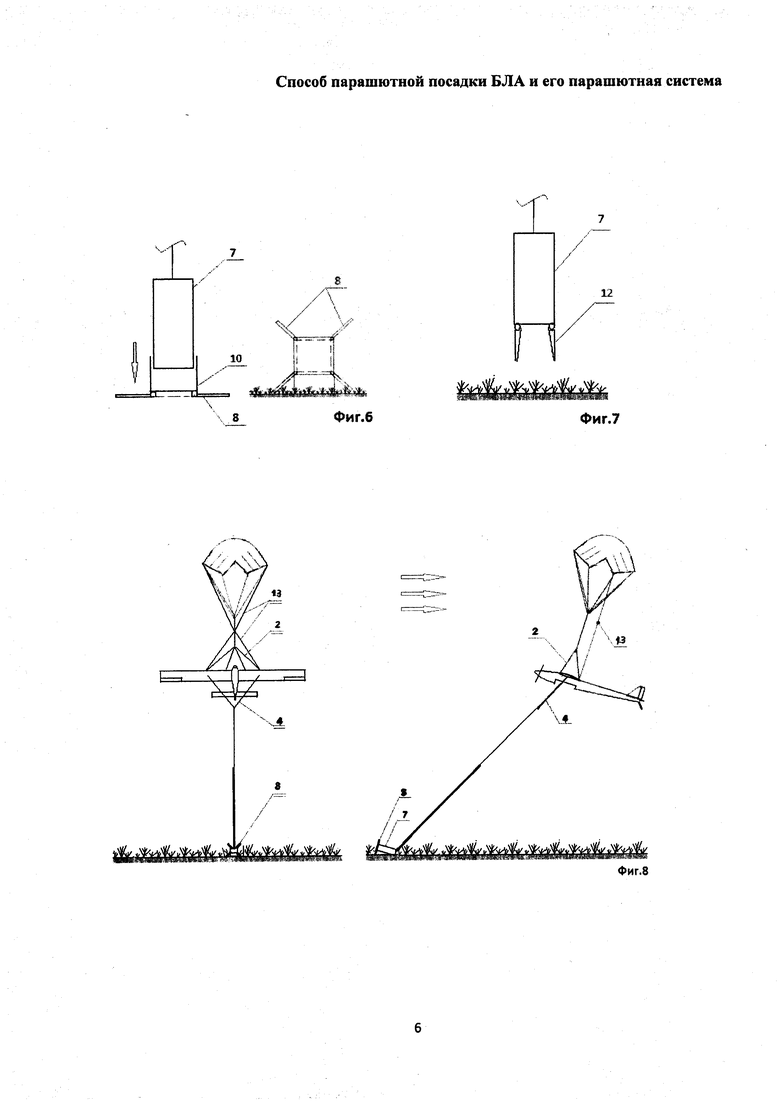
на фиг. 6 - схема варианта сбрасываемого контейнера для аккумуляторных батарей, снабженного блоком телескопического пневмодемпфера с раскладными якорными элементами;
на фиг. 7 - схема варианта легкоотделяемого контейнера для аккумуляторных батарей, оборудованного раскладными демпфирующими штырьками для ударного вбивания в грунт поверхности посадки при приземлении для якорения;
на фиг. 8 - схема варианта парашютной посадки БЛА с посадочным парашютом крестообразного типа;
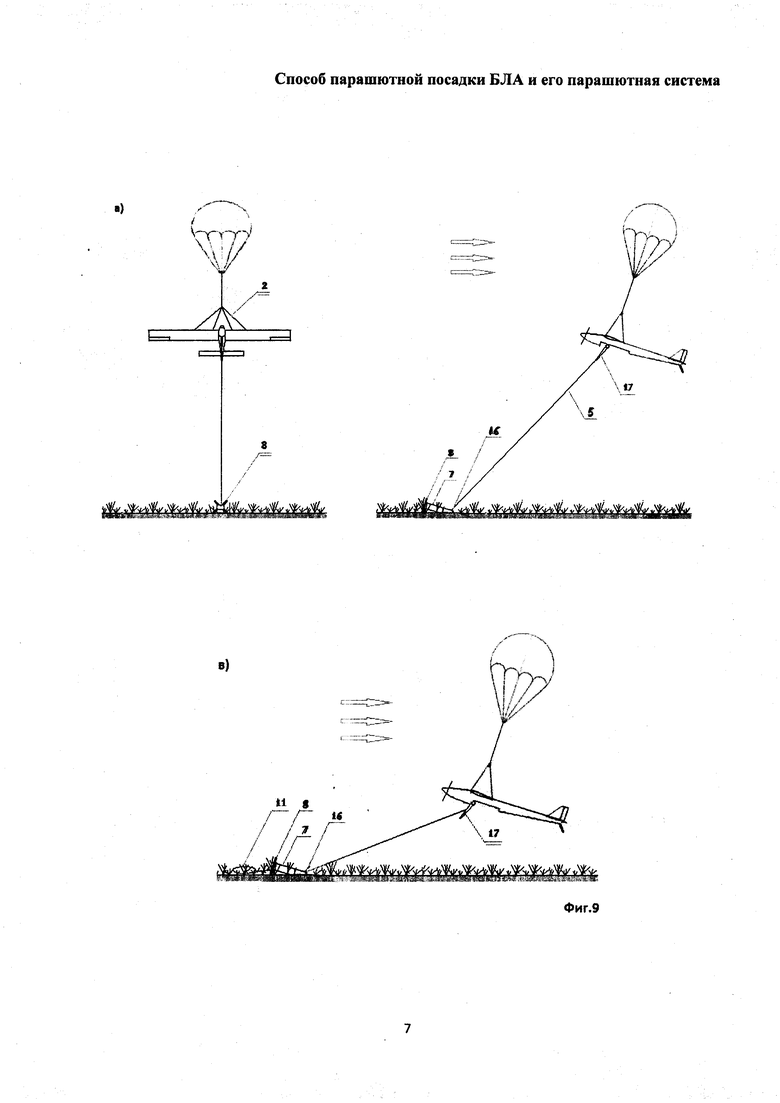
на фиг. 9а - схема варианта парашютной посадки БЛА с разворачиванием с него посадочного фала посредством контейнера с электрическими аккумуляторными батареями, оборудованного электролебедкой для посадочного фала, посредством которой поддерживают его натяжение;
на фиг. 9в - схема варианта парашютной посадки БЛА при стабилизации его взаимоположения с фалом поддерживанием его натяжения электролебедкой контейнера и приземление БЛА на посадочную рессору для демпфирования и дополнительного якорения вбиванием ее штырька;
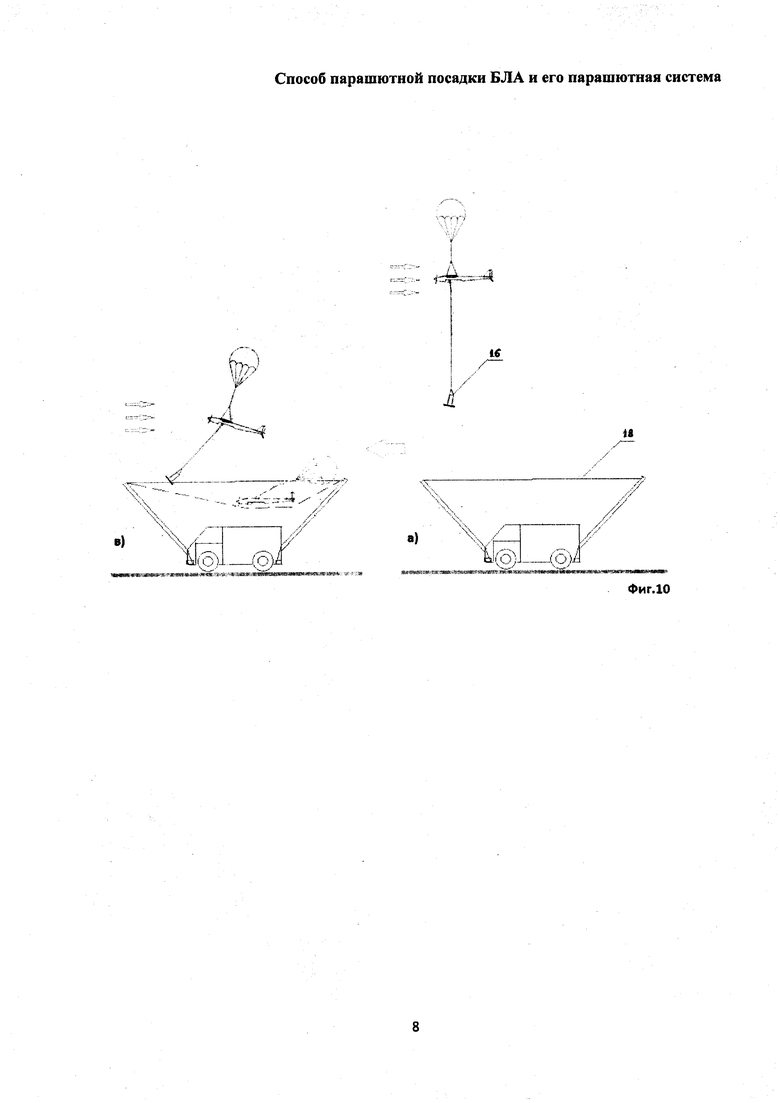
на фиг. 10а и фиг. 10в - схема варианта парашютной посадки БЛА посредством якорения контейнера с электролебедкой на сеть, растянутой в виде маскировки над транспортным средством;
на фиг. 11а и фиг. 11в - схема варианта парашютной посадки БЛА путем якорения контейнера посредством горизонтального гибкого элемента с крючками, растянутого над местом посадки между транспортным средством и стойкой с подвижной опорой;
на фиг. 12а и фиг. 12в - схема варианта парашютной аварийной посадки БЛА мультироторного типа путем якорения посадочного фала сбрасываемым контейнером с аккумуляторными батареями.
Предложенный способ парашютной посадки реализуется следующим образом. По команде на посадку на летящем БЛА 1 раскрывают парашют 3 и сбрасывают контейнер 7 с аккумуляторными силовыми батареями, с помощью которого выпускают посадочный фал 5, который соединен одним концом с БЛА посредством стабилизирующей двухповодковой уздечки 4 (фиг. 1а). Другим концом фал соединен посредством гибкого упругого элемента 6 с контейнером 7, который после сброса с БЛА под действием своего веса размотает весь фал 5, после чего своей кинетической энергией растянет упругий элемент 6 и вытянет гибкий ограничитель 15. Таким образом эта связка под БЛА на подвесной системе 2 парашюта снижается (фиг. 1в) до приземления контейнера с раскрытыми якорными зацепами 8, которыми контейнер под действием своего веса зацепится за растительность места посадки (фиг. 2). После якорения фала БЛА под парашютом будет сдвигаться ветром, а упругий элемент 6 будет сокращаться и поддерживать во всей связке натяжение. Вследствие этого посредством уздечки 4 будет стабилизироваться взаимоположение БЛА и парашюта относительно фала: проекции осей симметрии БЛА и парашюта совместно со всей связкой будут ориентированы вдоль направления ветра благодаря флюгирирующему эффекту от аэродинамической силы парашюта 3. При этом парашют будет выставлен под углом атаки, что обеспечит увеличение несущей составляющей его аэродинамической силы и замедлит снижение БЛА для его приземления с минимальными нагрузками (фиг. 3а). После приземления вся связка останется заякоренной, т.е. в натянутом и зафиксированном состоянии, что предохранит БЛА от негативного воздействия парусности парашюта, проявляющегося в возможности его волочения и переворачивания с ударами (фиг. 3в).
Для посадки могут применяться парашюты различных типов, например крестообразный (фиг. 9), Х-образную ориентацию которого относительно продольной оси БЛА стабилизируют с помощью системы растяжек 13.
Для повышения эффективности якорения могут быть дополнительно задействованы петли 16 на посадочном фале 5 (фиг. 3с), петли на гибком ограничителе 15 упругого элемента (фиг. 4в), самозатягивающаяся петля 11 (фиг. 9), раскладываемые штырьки 12 и 14 для вбивания в грунт места посадки, которые при этом еще и демпфируют ударную нагрузку на БЛА и контейнер (фиг. 3а и фиг. 7). Контейнер может амортизировать ударную нагрузку приземления посредством телескопической пневдемпфирующей насадки 10 с якорными зацепами 8, раздвигаемыми при раскладывании насадки на контейнере (фиг. 6).
Сброс контейнера с аккумуляторными силовыми батареями может происходить с раскрытием парашютика 19 (фиг. 11а и фиг. 3d) или ленточных кольцеобразных стриммеров 9 (фиг. 3в), которые позволят замедлить снижение контейнера, а после его приземления дополнительно заякорят его.
Поддерживание натяжения фала может быть обеспечено установленной на контейнере электролебедкой 16, включаемой при его сбросе с тяговым усилием, не превышающим вес контейнера, с помощью веса которого при его сбросе посредством фала раскладывают шарнирно установленную на БЛА посадочную рессору 17 (фиг. 9). Работой рессоры демпфируют приземление БЛА и стабилизируют взаимоположение с фалом БЛА и парашюта до и после приземления, когда дополнительно якорят БЛА вбиванием ее штырька.
Парашютная посадка БЛА посредством якорения контейнера с электролебедкой может осуществляться на сеть 18, растянутую, например, в виде маскировки над транспортным средством (фиг. 10а и фиг. 10в)
Парашютная посадка БЛА посредством якорения контейнера может осуществляться в заданном месте, где над местом посадки между транспортным средством 22 и стойкой 23 с подвижной опорой предварительно растягивают горизонтальный гибкий элемент 21 с крючками (фиг. 12а). При этом якорение посадочного фала 5 осуществляют его перехлестыванием и зацеплением одним из крючков при тралении круговым поворотом гибкого элемента 21 против ветра вокруг стойки путем его буксирования транспортным средством. Таким образом производят подхват посадочного фала и благодаря его заякоренному концу протаскивание его через гибкий элемент 21, в результате чего БЛА зависает на нем (фиг. 12в).
Парашютная посадка БЛА может быть применена в качестве аварийной посадки БЛА мультироторного типа 20 путем якорения, например, парашютиком 19 его посадочного фала 5 со сбрасываемым контейнером с силовыми аккумуляторными батареями (фиг. 12а и фиг. 12в).
Известен разведывательный беспилотный летательный аппарат (БЛА) с применением парашютной системы (патент США №2014151508 (A1), B64D 1/08, 2014.06.05), содержащий сбрасываемый контейнер с аккумуляторными батареями и полезной нагрузкой, который при посадке сбрасывают с БЛА и спускают на парашюте в перевернутом положении. При этом планер БЛА переводят в снижение по глиссаде планирования и приземляют скольжением на днище фюзеляжа на площадку посадки контейнера.
Недостатками прототипа являются отсутствие предохранения от воздействия возможной парусности парашюта на приземлившейся контейнер. Глиссада планирования планера БЛА и его приземление скольжением на днище фюзеляжа требует обеспечения незаграможденного земного пространства с мягким грунтом, что само по себе существенно ограничивает возможности необходимостью подбора соответствующей посадочной площадки. Сброс контейнера в режиме горизонтального полета на скорости 120 км/ч снижает точность его приземления, причем приземление контейнера и планера БЛА в отдалении друг от друга увеличивает время и затрудняет обслуживание. Все эти сложности только усугубляются в условиях ветреной погоды, что существенно снижает надежность и эффективность БЛА.
Целью настоящего изобретения является создание БЛА с электрическим движителем с системой парашютной посадки повышенной надежности.
Поставленная цель достигается тем, что в БЛА с электродвижителем, содержащим сбрасываемый контейнер с аккумуляторными батареями и парашютную систему, парашютная система установлена на сам БЛА, который снабжен устройством ориентации его продольной и поперечной осей, посадочным фалом, установленными на контейнере устройствами сматывания фала, поддерживания его натяжения и якорным устройством, причем посадочный фал посредством устройства поддерживания его натяжения и устройства ориентации продольной и поперечной осей БЛА соединяет последний с контейнером.
Устройство ориентации продольной оси БЛА может быть выполнено в виде прикрепленной концами двух поводков вдоль поперечной оси БЛА гибкой уздечки, устройство поддерживания натяжения фала может быть выполнено в виде гибкого упругого элемента растяжения, на сбрасываемом контейнере могут быть установлены раскладное якорное устройство, устройство сматывания фала и гибкого элемента может быть выполнено в виде мотовила, причем посадочный фал может быть соединен своими концами с уздечкой и упругим элементом, соединенным с контейнером.
Посадочный фал может быть соединен своими концами со сбрасываемым контейнером и упругим элементом, соединенным с уздечкой.
БЛА может быть выполнен в виде самолета, при этом гибкая уздечка прикреплена концами двух поводков на половинах его крыла.
БЛА может быть выполнен в виде вертолета мультироторной схемы, при этом гибкая уздечка прикреплена концами двух поводков на концах консольных балок.
Устройство поддерживания натяжения посадочного фала может быть выполнено в виде установленной на сбрасываемом контейнере с аккумуляторными батареями электроприводной лебедки с управлением от датчика натяжения фала.
Устройство поддерживания натяжения посадочного фала может быть выполнено в виде установленной на БЛА электроприводной лебедки с управлением от датчика натяжения фала.
Якорное устройство может быть выполнено в виде по меньшей мере одного петлеобразного ленточного стриммера, установленного на отделяемую часть БЛА, и/или на посадочный фал.
Сбрасываемый контейнер может быть снабжен блоком телескопического пневмодемпфера с раскладными якорными элементами.
Сбрасываемый контейнер с электрическими аккумуляторными батареями может быть выполнен в виде нескольких снабженных якорными устройствами модулей, причем они последовательно соединены с посадочным фалом.
Якорное устройство может быть выполнено в виде по меньшей мере одного парашютика, соединенного с контейнером.
Парашют может быть выполнен планирующим, крестообразным с Х-образной ориентацией проекции его купола на продольную ось БЛА, вращающимся, причем его стропы будут соединены с подвесной системой БЛА посредством вертлюга.
БЛА и сбрасываемый контейнер могут быть снабжены направленными вниз якорными штырьками для ударного вбивания в грунт поверхности посадки при приземлении.
Упругий элемент может быть установлен на участок посадочного фала с образованием из него гибкого ограничителя упругого растяжения, посадочный фал снабжают гибкими петлями, а на отделяемую часть БЛА устанавливают самозатягивающуюся гибкую петлю, причем упругий элемент соединен своими концами с граничными точками ограничительного участка посадочного фала.
Устройство ориентации продольной и поперечной осей БЛА может быть выполнено в виде шарнирно установленной на БЛА посадочной рессоры с возможностью расфиксации и разворачивания от веса контейнера поворотом в плоскости, проходящей через продольную ось БЛА, свободный конец рессоры снабжен штырьком якорения, при этом посадочный фал соединен с посадочной рессорой.
Предлагаемая система парашютной посадки БЛА с электродвижителем иллюстрируется чертежами, на которых изображены:
на фиг. 1а - схема варианта БЛА для парашютной посадки с разворачиванием с него посадочного фала посредством контейнера с электрическими аккумуляторными батареями при раскрытии посадочного парашюта и снижении с растяжением упругого элемента;
на фиг. 2 - схема варианта БЛА для парашютной посадки с якорением посадочного фала посредством контейнера при его приземлении и поддерживания натяжения фала для стабилизации взаимоположения с ним связки БЛА с парашютом;
на фиг. 3а и фиг. 3в - схема варианта БЛА для парашютной посадки с якорением посадочного фала посредством контейнера после его приземления и посадки БЛА;
на фиг. 3с - схема варианта БЛА для парашютной посадки с дополнительным якорением посадочного фала посредством гибкого ограничителя упругого элемента и петлями путем траления с захватом неровностей на месте посадки;
на фиг. 3d - схема варианта БЛА для парашютной посадки с дополнительным якорением посадочного фала посредством парашютика и якорных демпфирующих штырьков для ударного вбивания в грунт поверхности посадки при приземлении;
на фиг. 4а и фиг. 4в - схема варианта БЛА для парашютной посадки с разворачиванием с него посадочного фала посредством контейнера с ленточным кольцеобразным стриммером и схема якорения посадочного фала посредством него;
на фиг. 5а и фиг. 5в - схема варианта БЛА для парашютной посадки с разворачиванием с него посадочного фала посредством нескольких сбрасываемых модулей контейнера с аккумуляторными батареями;
на фиг. 6 - схема варианта сбрасываемого контейнера для аккумуляторных батарей, снабженного блоком телескопического пневмодемпфера с раскладными якорными элементами;
на фиг. 7 - схема варианта сбрасываемого контейнера для аккумуляторных батарей, оборудованного раскладными демпфирующими штырьками для ударного вбивания в грунт поверхности посадки при приземлении для якорения;
на фиг. 8 - схема варианта БЛА с посадочным парашютом крестообразного типа;
на фиг. 9а - схема варианта БЛА для парашютной посадки с разворачиванием с него посадочного фала посредством контейнера с электрическими аккумуляторными батареями, оборудованного электролебедкой для посадочного фала, посредством которой поддерживают его натяжение;
на фиг. 9в - схема варианта БЛА для парашютной посадки при стабилизации его взаимоположения с фалом поддерживанием его натяжения электролебедкой контейнера и приземление БЛА на посадочную рессору для демпфирования и дополнительного якорения вбиванием ее штырька;
на фиг. 12а и фиг. 12в - схема варианта выполнения БЛА мультироторного типа для аварийной парашютной посадки, где гибкая уздечка прикреплена концами двух поводков на концах консольных балок.
Беспилотный летательный аппарат 1 с электродвижителем содержит парашют 3 с его подвесной системой 2, сбрасываемый контейнер 7 с аккумуляторными силовыми батареями, посадочный фал 5, который соединен одним концом с БЛА посредством стабилизирующей двухповодковой уздечки 4 (фиг. 1а). Другим концом фал 5 соединен посредством гибкого упругого элемента 6 со сбрасываемым контейнером 7, снабженным раскрываемыми якорными зацепами 8, которыми контейнер под действием своего веса цепляются за растительность места посадки (фиг. 2).
Для посадки могут применяться парашюты различных типов, например крестообразный (фиг. 9), Х-образную ориентацию которого относительно продольной оси БЛА стабилизируют с помощью системы растяжек 13.
Для дополнительного якорения могут быть задействованы петли 16 на посадочном фале 5 (фиг. 3с), петли на гибком ограничителе 15 упругого элемента (фиг. 4в), самозатягивающаяся петля 11 (фиг. 9), раскладываемые штырьки 12 и 14 для вбивания в грунт места посадки и демпфирования ударной нагрузки на БЛА и контейнер (фиг. 3а и фиг. 7). Контейнер может быть выполнен с телескопической пневмодемпфирующей насадкой 10 с якорными зацепами 8, раздвигаемыми при раскладывании насадки на контейнере (фиг. 6).
Сброс контейнера с аккумуляторными силовыми батареями может происходить с раскрытием парашютика 19 (фиг. 11а и фиг. 3d), или ленточных кольцеобразных стриммеров 9 (фиг. 3в) для замедления снижения контейнера и его якорения.
На контейнере может быть установлена электролебедка 16 для поддерживания натяжения фала, включаемая при его сбросе с тяговым усилием, не превышающим вес контейнера 7. С помощью его веса при его сбросе посредством фала 5 раскладывают шарнирно установленную на БЛА посадочную рессору 17 (фиг. 9), для демпфирования приземления БЛА и стабилизации взаимоположения с фалом БЛА и парашюта до и после приземления, когда дополнительно якорят БЛА вбиванием штырька рессоры.
В варианте выполнения БЛА мультироторного типа 20, например, для его аварийной парашютной посадки гибкая уздечка может быть прикреплена концами своих двух поводков на концах его консольных балок (фиг. 12а). Сброшенный контейнер 7 снижается с помощью парашютика 19 и им же дополнительно якорится (фиг. 12в).
Предложенная система парашютной посадки БЛА с электродвижителем работает следующим образом. При заходе на посадку над заданном местом на БЛА 1 выпускают и раскрывают парашют 3 и сбрасывают контейнер 7 с аккумуляторными силовыми батареями, с помощью которого выпускают посадочный фал 5, который соединен одним концом с БЛА посредством стабилизирующей двухповодковой уздечки 4 (фиг. 1а). Другим концом фал соединен посредством гибкого упругого элемента 6 с контейнером 7, который после сброса с БЛА под действием своего веса размотает весь фал 5, после чего своей кинетической энергией растянет упругий элемент 6 и вытянет гибкий ограничитель 15. Таким образом эта связка под БЛА на подвесной системе 2 парашюта снижается (фиг. 1в) до приземления контейнера с раскрытыми якорными зацепами 8, которыми контейнер под действием своего веса зацепиться за растительность места посадки (фиг. 2). После якорения фала БЛА под парашютом будет сдвигаться ветром, а упругий элемент 6 будет сокращаться и поддерживать во всей связке натяжение. Вследствие этого посредством уздечки 4 будет стабилизироваться взаимоположение БЛА и парашюта относительно фала: проекции осей симметрии БЛА и парашюта совместно со всей связкой будут ориентированы вдоль направления ветра благодаря флюгирирующему эффекту от аэродинамической силы парашюта 3. При этом парашют будет выставлен под углом атаки, что обеспечит увеличение несущей составляющей его аэродинамической силы и замедлит снижение БЛА для его приземления с минимальными нагрузками (фиг. 3а). После приземления вся связка останется заякоренной, т.е. в натянутом и зафиксированном состоянии, что предохранит БЛА от негативного воздействия парусности парашюта, проявляющегося в возможности его волочения и переворачивания с ударами (фиг. 3в).
Для посадки могут применяться парашюты различных типов, например крестообразный (фиг. 9), Х-образную ориентацию которого относительно продольной оси БЛА стабилизируют с помощью системы растяжек 13.
Для повышения эффективности якорения могут быть дополнительно задействованы петли 16 на посадочном фале 5 (фиг. 3с), петли на гибком ограничителе 15 упругого элемента (фиг. 4в), самозатягивающаяся петля 11 (фиг. 9), раскладываемые штырьки 12 и 14 для вбивания в грунт места посадки, которые при этом еще и демпфируют ударную нагрузку на БЛА и контейнер (фиг. 3а и фиг. 7). Контейнер может амортизировать ударную нагрузку приземления посредством телескопической пневдемпфирующей насадки 10 с якорными зацепами 8, раздвигаемыми при раскладывании насадки на контейнере (фиг. 6).
Сброс контейнера с аккумуляторными силовыми батареями может происходить с раскрытием парашютика 19 (фиг. 11а и фиг. 3d), или ленточных кольцеобразных стримеров 9 (фиг. 3в), которые позволят замедлить снижение контейнера, а после его приземления дополнительно заякорят его.
Поддерживание натяжения фала может быть обеспечено установленной на контейнере электролебедкой 16, включаемой при его сбросе с тяговым усилием не превышающим вес контейнера, с помощью веса которого при его сбросе посредством фала раскладывают шарнирно установленную на БЛА посадочную рессору 17 (фиг. 9). Работой рессоры демпфируют приземление БЛА и стабилизируют взаимоположение с фалом БЛА и парашюта до и после приземления, когда дополнительно якорят БЛА вбиванием ее штырька.
Парашютная посадка БЛА может быть применена в качестве аварийной посадки БЛА мультироторного типа 20 путем якорения, например, парашютиком 19 его посадочного фала 5 со сбрасываемым контейнером с силовыми аккумуляторными батареями (фиг. 12а и фиг. 12в).
Таким образом, предлагаемые способ парашютной посадки летательного аппарата и парашютная система посадки беспилотного летательного аппарата (БЛА) с электродвижителем позволяют существенно повысить надежность наиболее важного этапа эксплуатации, каким всегда является посадка.
Одной из концепций предлагаемой технологии парашютной посадки является разделение масс частей БЛА в воздухе перед снижением, т.е. разделение в той же пропорции его кинетической энергии, а это аналогично разделяет ударные энергии приземления частей БЛА, что повышает его надежность и безопасность посадки.
БЛА с предлагаемыми технологией и системой парашютной посадки надежно предохранены от негативного воздействия возможной парусности парашюта после приземления в условиях любой силы ветра. Причем эффективность предложенной посадки тем выше, чем сильнее ветер, т.к. с усилением ветра радикально возрастет плавность вертикального снижения привязного аэродинамического носителя, каким является заякоренная связка посадочного фала с облегченным наполовину БЛА и парашютом под углом атаки.
При этом возможности применения БЛА совершенно не ограничиваются необходимостью предварительного подбора посадочной площадки для такой посадки - совершенно не требуется обеспечения незаграможденного земного пространства для его приземления. Напротив, неровности места посадки будут способствовать якорению фала, а минимизация вертикальной скорости снижения наполовину облегченного БЛА да еще и в режиме привязного аэродинамического носителя делает неактуальной проблему возможного столкновения БЛА с любыми выступами и растительностью.
Сброс контейнера в режиме зависания БЛА перед кабрированием максимально повышает точность прицеливания и приземления на парашютировании, что существенно расширяет возможности и эффективность применения комплексов БЛА - с такой технологией парашютной посадки появляется возможность сажать БЛА буквально на крышу двигающегося автомобиля. Точность приземления контейнера с аккумуляторными батареями (АКБ) и планера БЛА в заданном месте и, к тому же, вблизи друг от друга обеспечивает быстрое и удобное обслуживание комплексов с БЛА.
При этом появляется благоприятная возможность радикального повышения точности приземления путем простой минимизации площади миделя парашюта: таким образом можно будет увеличить скорость снижения под парашютом для компенсации сноса ветром, а после точного демпфированного приземления контейнера с АКБ и якорения посадочного фала скорость снижения БЛА резко упадет вследствие перехода парашюта в режим снижения привязного аэродинамического носителя. Таким путем будет обеспечена максимальная точность посадки при максимальной плавности приземления БЛА с полезной нагрузкой, причем приземление самого БЛА будет происходить всегда строго в определенном положении, т.е. его контактирование с поверхностью всегда будет осуществляться посредством специально предназначенного для этого штатного демпфирующего узла планера, например рессоры.
При снижении под парашютом благодаря маятниковому эффекту подвесной системы и узлу ориентации осей БЛА он выравнивается и переходит в режим снижения привязного аэродинамического носителя в стабилизированном состоянии с горизонтальным положением крыла, что также повышает надежность посадки.
При посадке в высокой растительности приземлившуюся связку контейнера, БЛА и парашюта будет значительно легче искать, т.к. искать придется гораздо более габаритный предмет, чем сам малоразмерный БЛА. Причем посадочный фал будет легко обнаружить элементарным поперечным тралением при поиске, а свободно раздуваемый ветром парашют вместо негатива от парусности будет подобно маяку только способствовать быстрому визуальному обнаружению БЛА.
При посадке БЛА на кроны деревьев их тоже будет легче обнаруживать, т.к. посадочный фал с контейнером опустятся вниз сквозь крону, к тому же это облегчит съем БЛА с деревьев.
Существенное уменьшение скорости снижения БЛА с полезной нагрузкой перед приземлением позволяет применять предлагаемую технологию для посадки более тяжелых БЛА среднего класса с более высокой грузоподъемностью, дальностью и продолжительностью полета. Для них парашютная посадка критична по причине высокой скорости снижения, вследствие чего их традиционно сажают на взлетно-посадочные полосы с помощью колесного шасси, что ограничивает их мобильность и эффективность. Предлагаемая технология парашютной посадки, напротив, существенно расширит возможности применения тяжелых БЛА отсутствием таких ограничений.
Таким образом применение предложенной технологии и системы парашютной посадки позволяют существенно повысить надежность наиболее ответственного этапа эксплуатации летательных аппаратов, каким всегда является посадка, что повысит надежность и эффективность применения комплексов БЛА, особенно самых распространенных на рынке БЛА оснащенных электродвижителями и АКБ.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПАРАШЮТНОЙ ПОСАДКИ БЕСПИЛОТНОГО САМОЛЕТА И ПАРАШЮТНАЯ СИСТЕМА ПОСАДКИ БЕСПИЛОТНОГО САМОЛЕТА | 2014 |
|
RU2592961C2 |
| Способ парашютной посадки беспилотных самолетов и беспилотный самолет с системой парашютной посадки | 2023 |
|
RU2834660C1 |
| СПОСОБЫ ВЗЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И ВЗЛЕТНО-ПОСАДОЧНАЯ СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТИХ СПОСОБОВ | 2010 |
|
RU2466913C2 |
| Система посадки беспилотного летательного аппарата вертикального взлета и посадки | 2017 |
|
RU2666975C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С ПАРАШЮТНОЙ СИСТЕМОЙ ПОСАДКИ | 2020 |
|
RU2754278C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С ПАРАШЮТНОЙ СИСТЕМОЙ ПОСАДКИ | 2010 |
|
RU2456211C1 |
| СПОСОБ ТОЧНОЙ ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА САМОЛЕТНОГО ТИПА И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2020 |
|
RU2767389C1 |
| СПАСАТЕЛЬНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2020 |
|
RU2752769C1 |
| Беспилотный летательный аппарат | 1990 |
|
SU1804414A3 |
| СПОСОБ ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2278060C1 |

Способ посадки беспилотного летательного аппарата (БЛА) включает применение парашютной системы, отделение контейнера с аккумуляторными батареями, разворачивание посадочного фала с якорным устройством и якорение фала. При этом осуществляют перевод БЛА в режим плавного снижения привязного аэродинамического носителя натяжением фала. Якорение фала производят гирляндно прикрепленными аккумуляторными контейнерами с элементами зацепления. БЛА с электродвижителем содержит сбрасываемый контейнер с аккумуляторными батареями и парашютную систему, которая установлена посредством подвесной системы. БЛА снабжен устройством ориентации продольной и поперечной осей и посадочным фалом. На контейнере установлены якорное устройство, устройства сматывания фала и поддерживания его натяжения. Посадочный фал посредством устройства поддерживания его натяжения и устройства ориентации осей БЛА соединен с контейнером. Группа изобретений направлена на предотвращение повреждения БЛА при посадке. 2 н. и 32 з.п. ф-лы, 12 ил.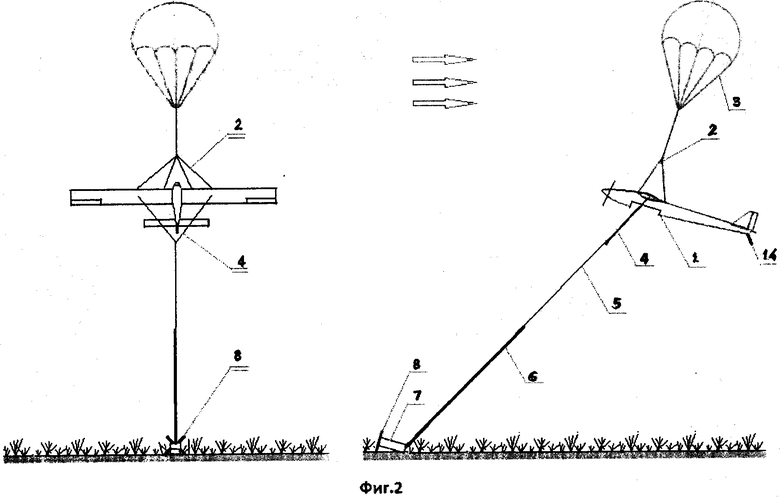
1. Способ посадки беспилотного летательного аппарата (БЛА) с применением парашютной системы, включающий снижение скорости БЛА, сброс с него отделяемой части, раскрытие парашюта и последовательное приземление отделяемой части и самого БЛА, отличающийся тем, что при раскрытии парашюта с подвесной системой для БЛА с него сбрасывают установленное на свободном конце посадочного фала якорное устройство, с помощью которого разворачивают фал вниз и производят его якорение на месте посадки при приземлении, переводят связку БЛА с парашютом в режим снижения привязного аэродинамического носителя, при этом поддерживают натяжение посадочного фала и стабилизируют взаимоположение с ним БЛА и парашюта до и после приземления.
2. Способ посадки беспилотного летательного аппарата (БЛА) по п. 1, отличающийся тем, что с БЛА сбрасывают отделяемую часть, соединенную посредством гибкого упругого элемента с посадочным фалом, связку которых разворачивают с помощью веса отделяемой части, после чего ее снижение тормозят растяжением упругого элемента, при этом путем обратного его упругого сокращения поддерживают натяжение фала после его якорения и стабилизируют взаимоположение с ним БЛА и парашюта с помощью гибкой двухповодковой уздечки ориентацией проекций их осей симметрии вдоль направления ветра.
3. Способ посадки беспилотного летательного аппарата (БЛА) по п. 1, отличающийся тем, что используют крестообразный парашют, при этом взаимоположение его с фалом стабилизируют при Х-образной ориентации проекции купола парашюта на продольную ось БЛА.
4. Способ посадки беспилотного летательного аппарата (БЛА) по п. 2, отличающийся тем, что используют вращающийся парашют, стропы которого соединены с подвесной системой БЛА посредством вертлюга, при этом взаимоположение парашюта с фалом стабилизируют при двухточечном соединении фала к БЛА вдоль его поперечной оси посредством двухповодковой уздечки.
5. Способ посадки беспилотного летательного аппарата (БЛА) по п. 1, отличающийся тем, что используют планирующий парашют, при этом натяжение посадочного фала поддерживают с борта БЛА.
6. Способ посадки беспилотного летательного аппарата (БЛА) по п. 2, отличающийся тем, что растяжение упругого элемента ограничивают гибким ограничителем с последовательно установленными нем и посадочном фале гибкими петлями, с отделяемой части БЛА разворачивают самозатягивающуюся гибкую петлю, при этом якорение посадочного фала производят последовательными тралением и захватом неровностей на месте посадки.
7. Способ посадки беспилотного летательного аппарата (БЛА) по п. 2, отличающийся тем, что при посадке БЛА с электрическим приводом от него отделяют контейнер с электрическими аккумуляторными батареями (АКБ), снабженный, как и БЛА, направленным вниз штырьком, с помощью которых осуществляют дополнительное якорение фала ударным вбиванием штырьков в грунт места посадки при приземлении контейнера и БЛА, при этом амортизируют их посадочную энергию.
8. Способ посадки беспилотного летательного аппарата (БЛА) по п. 7, отличающийся тем, что контейнер снабжен электролебедкой для посадочного фала с тяговым усилием, не превышающим вес контейнера, с помощью веса которого посредством фала раскладывают шарнирно установленную на БЛА снабженную якорным штырьком посадочную рессору, работой которой демпфируют приземление БЛА, якорят его и стабилизируют его взаимоположение с фалом и парашютом до и после приземления, при этом электролебедку подключают к АКБ при отделении контейнера.
9. Способ посадки беспилотного летательного аппарата (БЛА) по п. 7, отличающийся тем, что сброс контейнера рассчитывают для приземления его в заданном месте посадки, при этом перед раскрытием парашюта снижают высоту и скорость полета БЛА.
10. Способ посадки беспилотного летательного аппарата (БЛА) по п. 9, отличающийся тем, что БЛА выполнен в виде самолета, при сбросе с него контейнера и перед раскрытием парашюта самолет переводят в режим набора высоты с выключенным движителем до потери скорости.
11. Способ посадки беспилотного летательного аппарата (БЛА) по п. 9, отличающийся тем, что в заданном месте посадки располагают устройство захвата в виде растянутой на заданном месте сети, на которую приземляют якорное устройство, при этом якорение фала осуществляют посредством сети.
12. Способ посадки беспилотного летательного аппарата (БЛА) по пп. 10 и 11, отличающийся тем, что сеть растягивают в виде маскировки над транспортным средством, перемещением которого осуществляют наведение сети для точного попадания в нее контейнера, после чего производят там якорение посадочного фала, при этом путем его подтягивания электролебедкой контейнера приводят БЛА к посадке в сеть.
13. Способ посадки беспилотного летательного аппарата (БЛА) по п. 2, отличающийся тем, что при посадке от БЛА отделяют несколько модулей контейнера с электрическими аккумуляторными батареями (АКБ), последовательно соединенных с посадочным фалом и снабженных раскладными якорными блоками, при этом с их помощью амортизируют посадочную энергию модулей и производят последовательное якорение фала в нескольких точках.
14. Способ посадки беспилотного летательного аппарата (БЛА) по п. 1, отличающийся тем, что при сбросе отделяемой части БЛА с нее раскрывают парашютик, посредством которого аэродинамически тормозят ее снижение, при этом посредством парашютика осуществляют дополнительное якорение фала при приземлении.
15. Способ посадки самолета по п. 1, отличающийся тем, что при сбросе отделяемой части БЛА с нее развертывают петлеобразные ленточные стриммеры, посредством которых аэродинамически тормозят ее снижение, при этом посредством стримеров осуществляют дополнительное якорение фала при приземлении.
16. Способ посадки беспилотного летательного аппарата (БЛА) по п. 7, отличающийся тем, что сброс контейнера рассчитывают для приземления его в заданном месте посадки, где над местом посадки между транспортным средством и стойкой с подвижной опорой предварительно растягивают горизонтальный гибкий элемент с крючками, при этом якорение посадочного фала осуществляют его перехлестыванием и зацеплением одним из крючков при тралении круговым поворотом гибкого элемента против ветра вокруг стойки буксированием транспортным средством.
17. Способ посадки беспилотного летательного аппарата (БЛА) по п. 7, отличающийся тем, что при посадке БЛА самолетного типа его переводят в режим набора высоты с выключенным движителем, раскрывают парашют и с помощью его аэродинамического усилия БЛА переворачивают на 180 градусов, при этом отделение контейнера производят от действия на него центробежной силы в процессе поворота связки парашюта с БЛА над заданным местом посадки, где БЛА приземляют на его верхнюю поверхность.
18. Беспилотный летательный аппарат (БЛА) с электродвижителем и парашютной системой посадки, содержащий сбрасываемый контейнер с аккумуляторными батареями (АКБ) и парашютную систему, отличающийся тем, что парашютная система установлена посредством подвесной системы на БЛА, который снабжен устройством ориентации его продольной и поперечной осей, посадочным фалом, на контейнере установлены якорное устройство, устройства сматывания фала и поддерживания его натяжения, причем посадочный фал посредством устройства поддерживания его натяжения и устройства ориентации осей БЛА соединяет последний с контейнером.
19. Беспилотный летательный аппарат (БЛА) по п. 18, отличающийся тем, что устройство ориентации его продольной оси выполнено в виде прикрепленной концами двух поводков вдоль поперечной оси БЛА гибкой уздечки, устройство поддерживания натяжения фала выполнено в виде гибкого упругого элемента растяжения, на сбрасываемом контейнере установлены раскладное якорное устройство, устройство сматывания фала и гибкого элемента в виде мотовила, причем посадочный фал соединен своими концами с уздечкой и упругим элементом, соединенным с контейнером.
20. Беспилотный летательный аппарат (БЛА) по п. 18, отличающийся тем, что посадочный фал соединен своими концами со сбрасываемым контейнером и упругим элементом, соединенным с уздечкой.
21. Беспилотный летательный аппарат (БЛА) по п. 18 или 19, отличающийся тем, что БЛА выполнен в виде самолета, при этом гибкая уздечка прикреплена концами двух поводков на половинах его крыла.
22. Беспилотный летательный аппарат (БЛА) по п. 18 или 19, отличающийся тем, что БЛА выполнен в виде вертолета мультироторной схемы, при этом гибкая уздечка прикреплена концами двух поводков на концах консольных балок.
23. Беспилотный летательный аппарат (БЛА) по п. 18, отличающийся тем, что устройство поддерживания натяжения посадочного фала выполнено в виде установленной на сбрасываемом контейнере с аккумуляторными батареями и подключенной к ним электроприводной лебедки с управлением от датчика натяжения фала.
24. Беспилотный летательный аппарат (БЛА) по п. 18, отличающийся тем, что устройство поддерживания натяжения посадочного фала выполнено в виде установленной на БЛА электроприводной лебедки с управлением от датчика натяжения фала.
25. Беспилотный летательный аппарат (БЛА) по п. 18, отличающийся тем, что якорное устройство выполнено в виде по меньшей мере одного петлеобразного ленточного стримера, установленного на отделяемую часть БЛА и/или на посадочный фал.
26. Беспилотный летательный аппарат (БЛА) по п. 18, отличающийся тем, что сбрасываемый контейнер снабжен блоком телескопического пневмодемпфера с раскладными якорными элементами.
27. Беспилотный летательный аппарат (БЛА) по п. 18, отличающийся тем, что сбрасываемый контейнер с электрическими аккумуляторными батареями (АКБ) может быть выполнен в виде нескольких снабженных якорными устройствами модулей, причем они последовательно соединены с посадочным фалом.
28. Беспилотный летательный аппарат (БЛА) по п. 18, отличающийся тем, что якорное устройство выполнено в виде по меньшей мере одного парашютика, соединенного с отделяемой частью БЛА.
29. Беспилотный летательный аппарат (БЛА) по п. 18, отличающийся тем, что парашют выполнен планирующим.
30. Беспилотный летательный аппарат (БЛА) по п. 18, отличающийся тем, что парашют выполнен крестообразным с Х-образной ориентацией проекции его купола на продольную ось БЛА.
31. Беспилотный летательный аппарат (БЛА) по п. 18, отличающийся тем, что парашют выполнен вращающимся, причем его стропы соединены с подвесной системой БЛА посредством вертлюга.
32. Беспилотный летательный аппарат (БЛА) по п. 18, отличающийся тем, что БЛА и сбрасываемый контейнер снабжены направленными вниз якорными штырьками для ударного вбивания в грунт поверхности посадки при приземлении.
33. Беспилотный летательный аппарат (БЛА) по п. 18, отличающийся тем, что упругий элемент установлен на участок посадочного фала с образованием из него гибкого ограничителя упругого растяжения, посадочный фал снабжен гибкими петлями, а на отделяемую часть БЛА установлена самозатягивающаяся гибкая петля, причем упругий элемент соединен своими концами с граничными точками ограничительного участка посадочного фала.
34. Беспилотный летательный аппарат (БЛА) по п. 18, отличающийся тем, что устройство ориентации его продольной оси выполнено в виде шарнирно установленной на БЛА посадочной рессоры с возможностью расфиксации и разворачивания от веса контейнера поворотом в плоскости, проходящей через продольную ось БЛА, свободный конец рессоры снабжен штырьком якорения, при этом посадочный фал соединен с рессорой.
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| CN 102530255 A, 04.07.2012 | |||
| СПОСОБЫ ВЗЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И ВЗЛЕТНО-ПОСАДОЧНАЯ СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТИХ СПОСОБОВ | 2010 |
|
RU2466913C2 |

