Изобретение относится к нерельсовому транспорту, преимущественно к автопоездам в составе с одноосными прицепами.
Известен стабилизатор прицепа, связанный с тормозной системой автомобиля концерна Volvo, описанный в статье (https://www.volvocars.com/ru-md/support/car/v40/article/1c2d73d0ab62c950c0a801e800aa3bfc), называемый как система стабилизации одноосного прицепа (TSA - Trailer Stability Assist). Данный стабилизатор прицепа TSA предназначен для стабилизации автомобиля с прицепом в ситуациях, когда автопоезд подвергается автоколебаниям при возникновении раскачки прицепа. Автоколебание возникает на высоких скоростях, но, если прицеп перегружен или груз в прицепе распределен неправильно, например, смещен назад относительно оси колес, опасность автоколебаний появляется уже на более низких скоростях. Стабилизатор содержит векторные датчики положения автомобиля и непрерывно контролирует перемещения автомобиля, особенно в боковом направлении. Когда регистрируются автоколебания, происходит индивидуальное притормаживание передних колес автомобиля, что повышает устойчивость автопоезда в целом. Этого бывает достаточно, чтобы водитель восстановил управление автомобилем. Если автоколебания не гасятся несмотря на подключение системы TSA, автомобиль притормаживается всеми четырьмя колесами и снижается тяговое усилие двигателя. После того как автоколебания постепенно затухают, и автопоезду возвращается устойчивое положение, система TSA отключается, и водитель вновь получает полный контроль над автомобилем. Недостаток данного стабилизатора заключается в том, что при появлении поперечных колебаний прицепа, выборочно подтормаживаются колеса тягача, а колеса прицепа не подтормаживаются. В результате этого скорость автопоезда снижается, а прицеп оказывает силовое воздействие на автомобиль за счет сил инерции, что может вызвать нарушение устойчивости прямолинейного хода автомобиля и автопоезда в целом.
Известен одноосный прицеп с электроприводом ходовых колес концерна Hymer Dethleffs «E.home coco», описание которого приведено в источнике (https://dzen.ru/a/Xojrk5ZUSmmzxXGy). Прицеп снабжен двумя электродвигателями-генераторами, предназначенными для привода ходовых колес, соединенными с электробатареями. Прицеп оснащен векторными датчиками крутящего момента и центральным блоком управления, что позволяет при обнаружении качающихся движений прицепа перераспределять крутящий момент для каждого из его колес. При прохождении автопоездом поворотов блоком управления обеспечивается регулирование разных угловых скоростей внутренних и наружных ходовых колес прицепа по отношению к центру поворота.
Недостаток данного прицепа заключается в том, что взаимосвязи его элементов не обеспечивают контроля положения прицепа под углом в горизонтальной плоскости относительно тягача, так как векторные датчики реагируют на качающиеся движения прицепа, а не на его угловые перемещения относительно тягача при прямолинейном движении последнего.
Техническая проблема заключается в разработке автопоезда с электродинамическим устройством стабилизации прямолинейного движения прицепа, взаимосвязи конструктивных элементов которого способствуют восстановлению прямолинейности его движения после возникновения горизонтальных поперечных колебаний при строго прямолинейном движении тягача, путем подтормаживания ближнего по отношению к полюсу отклонения ходового колеса прицепа.
Техническая проблема решается за счет того, что в сравнении с прототипом, шарнирное крепление передней части дышла прицепа с тягачом снабжено крестовиной, образованной из шкворня и горизонтальной оси, соединенных неподвижно между собой, при этом шкворень расположен вертикально в продольной плоскости, пересекающей середины ходовых осей колес тягача и соединен с задней частью тягача посредством вилки, а горизонтальная ось крестовины расположена поперечно дышлу и соединена с ним посредством вилки, закрепленной на его конце, с возможностью поворота в вертикальной поперечной плоскости, при этом обмотки роторов левого и правого электродвигателей-генераторов соединены в отдельные контуры электроцепи, в каждый из которых включено нагрузочное сопротивление, и встроены четыре датчика управления электродвигателем-генератором, установленные на тягаче: датчик положения управляемых колес тягача с нормально замкнутыми контактами, кинематически связанный с рулевым колесом тягача; датчик углового отклонения дышла прицепа в горизонтальной плоскости относительно тягача с нормально разомкнутыми контактами, кинематически связанный со шкворнем; датчик с нормально разомкнутыми контактами включения тормозов, кинематически связанный с тормозной педалью тягача; датчик с нормально разомкнутыми контактами включения передачи заднего хода тягача, кинематически связанный с коробкой передач тягача.
Техническая сущность изобретения поясняется чертежами, на которых изображено:
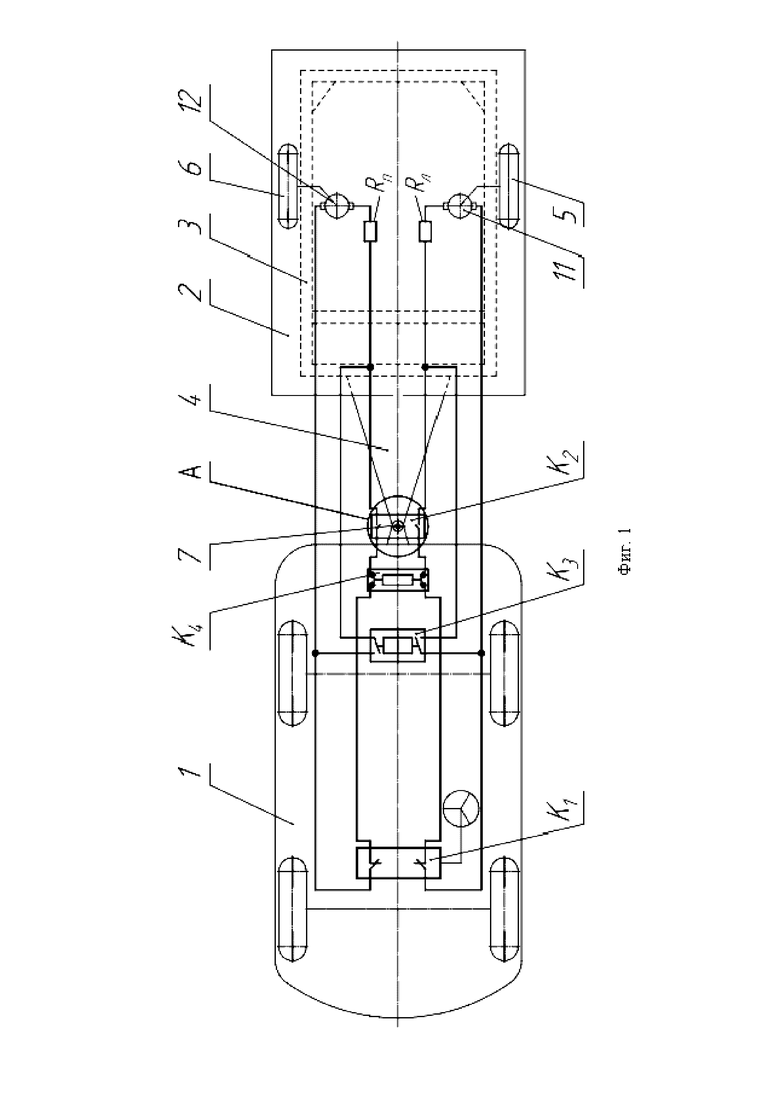
- фиг. 1 - Схема размещения элементов электродинамического устройства стабилизации прямолинейного движения прицепа на автопоезде - вид сверху,
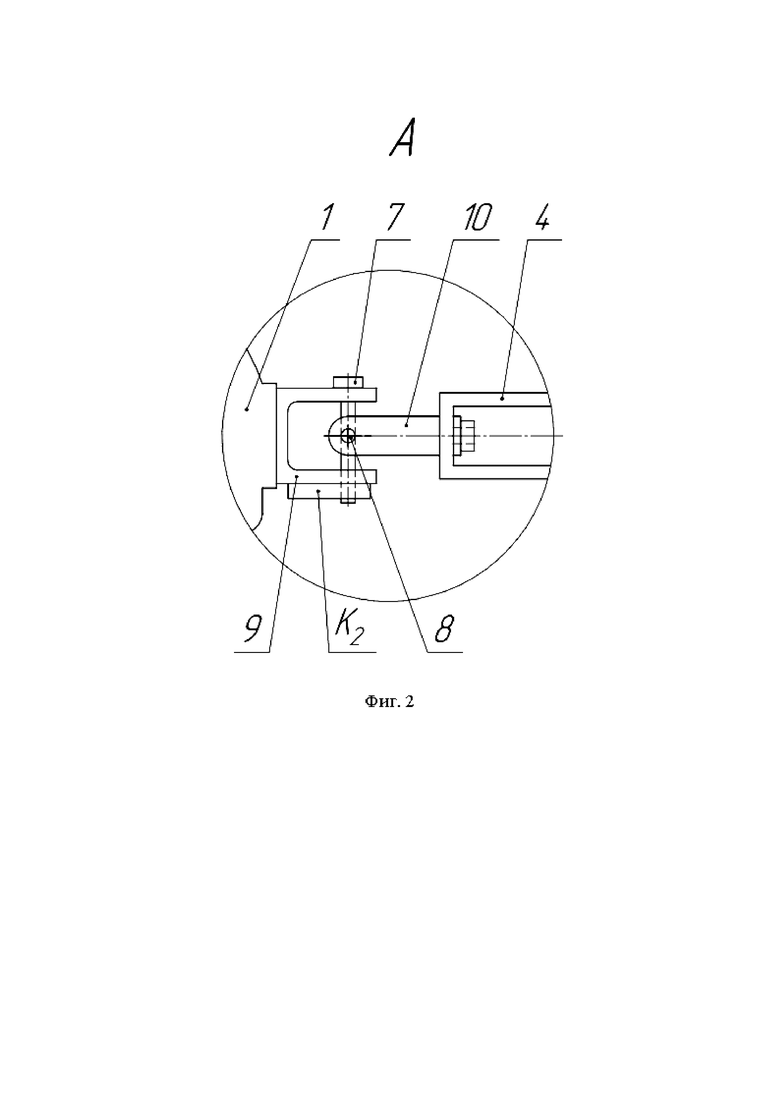
- фиг. 2 - Схема шарнирного крепления дышла прицепа к тягачу - вид сбоку.
Автопоезд с электродинамическим устройством стабилизации прямолинейного движения прицепа содержит (фиг. 1) тягач 1 и одноосный прицеп 2, рама 3 которого выполнена заодно с дышлом 4, соединенным передней частью через шарнирное крепление с тягачом 1, а левое и правое ходовые колеса 5,6 закреплены на ступицах и связаны через упругую подвеску с упомянутой рамой 3. Шарнирное крепление (фиг. 2) передней части дышла 4 к тягачу 1 выполнено в виде крестообразного шарнира, снабженного крестовиной, образованной из шкворня 7 и поперечной оси 8, соединенных неподвижно между собой, при этом шкворень 7 расположен вертикально в продольной плоскости, пересекающей середины ходовых осей колес тягача 1 и соединен с задней частью тягача 1 посредством вилки 9, а поперечная ось 8 крестовины расположена в горизонтальной плоскости поперечно дышлу 4 и соединена с дышлом 4 посредством вилки 10, закрепленной на дышле 4, с возможностью поворота в вертикальной поперечной плоскости.
На раме 3 прицепа 2 закреплены два электродвигателя-генератора постоянного тока - левый 11 и правый 12, причем ротор левого электродвигателя-генератора 11 кинематически соединен со ступицей левого колеса 5 с возможностью передачи на него крутящего момента, а ротор правого электродвигателя-генератора 12 кинематически соединен со ступицей правого колеса 6 прицепа с возможностью передачи на него крутящего момента.
Обмотки роторов левого и правого электродвигателей-генераторов 11, 12 ходовых колес прицепа 2 соединены в отдельные контуры электроцепи, включающие нагрузочные сопротивления Rл, Rп контуров левого и правого электродвигателей-генераторов 11, 12 соответственно, причем каждый из этих контуров соединен с установленными на тягаче датчиками: датчиком К1 с нормально замкнутыми контактами положения управляемых колес тягача 1, кинематически связанным с рулевым колесом тягача, обеспечивающим размыкание контуров обмоток роторов электродвигателей-генераторов 11, 12 при повороте управляемых колес тягача 1 от положения прямолинейного движения; кинематически связанным со шкворнем 7 датчиком К2 с нормально разомкнутыми контактами углового отклонения дышла 4 прицепа 2 относительно тягача 1 в горизонтальной плоскости, обеспечивающим замыкание контуров обмоток роторов электродвигателей-генераторов при повороте дышла 4 относительно тягача 1; датчиком К3 с нормально разомкнутыми контактами тормозного сигнала тягача 1, кинематически связанным с тормозной педалью тягача, обеспечивающим замыкание контуров обмоток роторов электродвигателей-генераторов при торможении тягача; датчиком К4 с нормально замкнутыми контактами включения передачи заднего хода тягача 1, кинематически связанным с коробкой передач тягача, обеспечивающим размыкание контуров обмоток роторов при движении автопоезда задним ходом.
Автопоезд с электродинамическим устройством стабилизации прямолинейного движения прицепа работает следующим образом.
При движении автопоезда по прямолинейной траектории датчики К2 и К3 находятся в разомкнутом состоянии - тормозной момент на роторах электродвигателей-генераторов и кинематически связанных с ними ходовых колес не возникает, так как контуры электроцепи электродвигателей-генераторов 11 и 12 разомкнуты. Движение прицепа происходит без подтормаживания его колес.
При прямолинейном движении автопоезда в результате действия на него внешних поперечных сил (от бокового ветра, неравномерности давления воздуха в шинах прицепа и пр.), могут возникать боковые колебания прицепа. При отклонении прицепа 2 от прямолинейной траектории движения тягача 1, например влево, дышло 4 прицепа 2 поворачивается относительно тягача 1. При этом датчик К2 замыкает контур левого электродвигателя-генератора 11, связанного кинематически с левым колесом 5 прицепа. В результате замыкания контура возникает тормозной электромагнитный момент на роторе электродвигателя-генератора 11 и кинематически связанном с ним левом ходовом колесе 5 прицепа 2. Подтормаживание левого колеса 5 приводит к образованию силового момента реакции от поверхности движения на левое колесо прицепа, способствующего повороту прицепа относительно шкворня 7 в положение, соответствующее прямолинейной траектории движения тягача 1. Это позволяет повысить устойчивость прямолинейного движения прицепа и автопоезда в целом.
При повороте автопоезда (например, влево) управляемые колеса тягача поворачиваются влево, а дышло 4 прицепа 2 совершает поворот относительно тягача 1. При этом контакты датчика К1 положения управляемых колес тягача размыкаются, а контакты датчика К2 положения дышла прицепа относительно тягача замыкаются. Подтормаживания левого колеса 5 прицепа не происходит, так как контур электроцепи левого электродвигателя-генератора 11 разомкнут.
При торможении автопоезда датчик К3, включенный в тормозную систему тягача 1 замыкает контуры электроцепи левого и правого электродвигателей-генераторов 11, 12. В результате этого возникает тормозной момент на роторах электродвигателей-генераторов 11, 12 и на кинематически связанных с ними колесах 5,6 прицепа 2. В результате этого происходит подтормаживание колес прицепа.
При движении автопоезда задним ходом датчик К4 размыкает контуры электроцепи левого и правого электродвигателей-генераторов 11 и 12. В результате этого при складывании автопоезда в процессе маневрирования задним ходом, тормозного момента на роторах электродвигателей-генераторов 11, 12 и на кинематически связанных с ними колесах 5, 6 прицепа 2 не возникает.
Технический результат заключается в том, что предложенное техническое решение автопоезда с электродинамическим устройством стабилизации прямолинейного движения прицепа позволяет улучшить стабилизацию прямолинейного движения одноосного прицепа при прямолинейном движении тягача, за счет создания стабилизирующего силового момента относительно точки сцепки тягача с прицепом, возникающего от реакции дороги при подтормаживании ближнего к полюсу отклонения колеса прицепа.
Это повысит безопасность транспортного поезда в условиях эксплуатации.
| название | год | авторы | номер документа |
|---|---|---|---|
| Тормоз наката с механизмом стабилизации движения одноосного прицепа | 2023 |
|
RU2820724C1 |
| ИНЕРЦИОННЫЙ ТОРМОЗ ОДНООСНОГО ПРИЦЕПА С УСТРОЙСТВОМ СТАБИЛИЗАЦИИ ПРЯМОЛИНЕЙНОГО ДВИЖЕНИЯ | 2024 |
|
RU2829583C1 |
| Инерционный тормозной механизм одноосного прицепа | 2024 |
|
RU2837292C1 |
| Тормоз наката с устройством стабилизации прямолинейного движения одноосного прицепа | 2024 |
|
RU2825212C1 |
| ОДНООСНЫЙ ПРИЦЕП С ИНЕРЦИОННЫМ ТОРМОЗОМ | 2024 |
|
RU2835888C1 |
| СТАБИЛИЗИРУЮЩЕЕ ТЯГОВО-СЦЕПНОЕ УСТРОЙСТВО ОДНООСНОГО ПРИЦЕПА | 2019 |
|
RU2744924C1 |
| Механизм стабилизации прямолинейного движения одноосного прицепа | 2022 |
|
RU2777866C1 |
| Стабилизирующее буксирное устройство одноосного прицепа с переменным наклоном шкворня | 2021 |
|
RU2767088C1 |
| Стабилизирующее сцепное устройство одноосного прицепа | 2023 |
|
RU2811193C1 |
| Сцепное стабилизирующее устройство одноосного прицепа | 2023 |
|
RU2810832C1 |
Изобретение относится к автопоездам в составе с одноосными прицепами. Автопоезд с электродинамическим устройством стабилизации прямолинейного движения прицепа содержит тягач, снабженный рулевым механизмом и тормозной системой, и одноосный прицеп. На раме прицепа закреплены два электродвигателя-генератора постоянного тока. Обмотки роторов левого и правого электродвигателей-генераторов соединены в отдельные контуры электроцепи, в каждый из которых включено нагрузочное сопротивление и встроены четыре датчика управления электродвигателем-генератором, установленные на тягаче: датчик положения управляемых колес тягача с нормально замкнутыми контактами, кинематически связанный с рулевым колесом тягача, датчик углового отклонения дышла прицепа в горизонтальной плоскости относительно тягача с нормально разомкнутыми контактами, кинематически связанный со шкворнем, датчик с нормально разомкнутыми контактами включения тормозов, кинематически связанный с тормозной педалью тягача, и датчик с нормально разомкнутыми контактами включения передачи заднего хода тягача, кинематически связанный с коробкой передач тягача. Достигается улучшение стабилизации прямолинейного движения одноосного прицепа при прямолинейном движении тягача. 2 ил.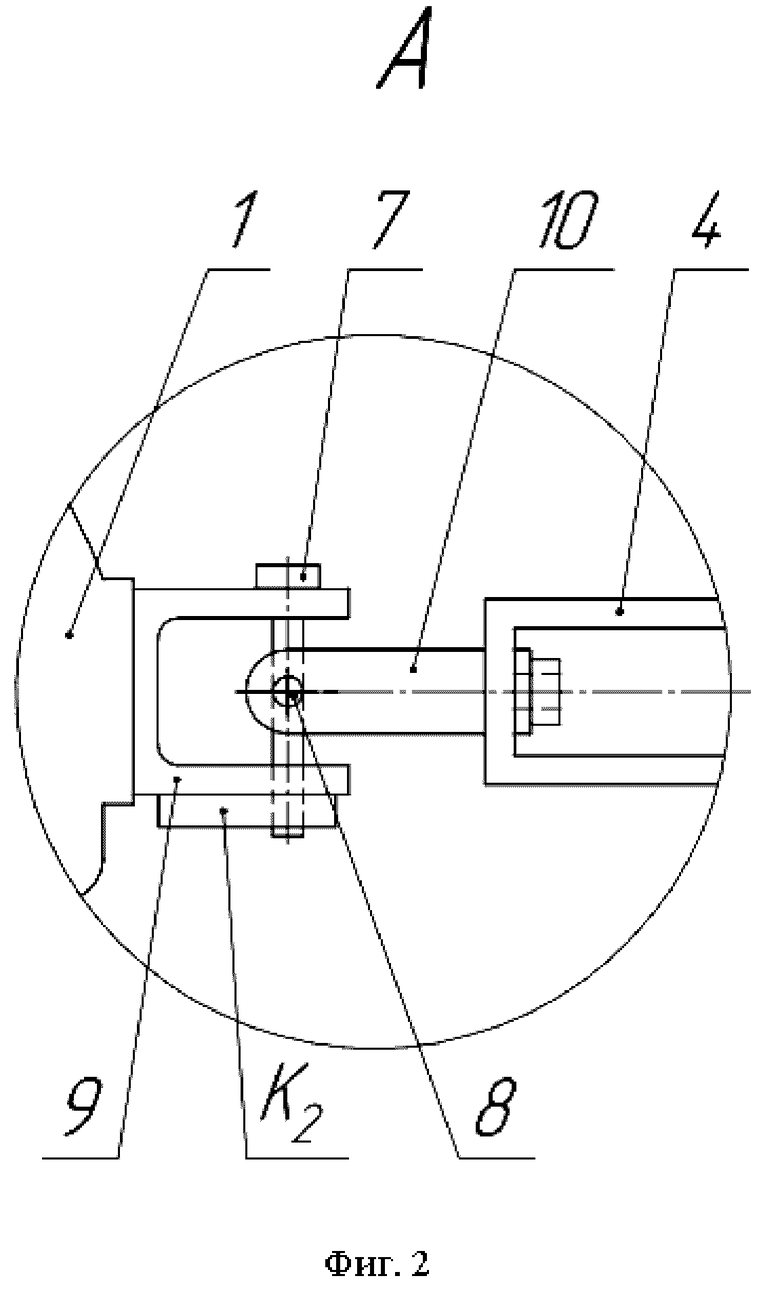
Автопоезд с электродинамическим устройством стабилизации прямолинейного движения прицепа, содержащий тягач, снабженный коробкой передач, рулевым механизмом, управляемым рулевым колесом, тормозной системой, управляемой тормозной педалью, и одноосный прицеп, рама которого выполнена заодно с дышлом, соединенным передней частью через шарнирное крепление с тягачом, а ходовые колеса закреплены на ступицах и связаны через упругую подвеску с упомянутой рамой, при этом на раме прицепа закреплены два электродвигателя-генератора постоянного тока – левый и правый, причем ротор левого электродвигателя-генератора кинематически соединен со ступицей левого колеса, а ротор правого электродвигателя-генератора кинематически соединен со ступицей правого колеса прицепа, отличающийся тем, что шарнирное крепление передней части дышла прицепа с тягачом снабжено крестовиной, образованной из шкворня и горизонтальной оси, соединенных неподвижно между собой, при этом шкворень расположен вертикально в продольной плоскости, пересекающей середины ходовых осей колес тягача, и соединен с задней частью тягача посредством вилки, а горизонтальная ось крестовины расположена поперечно дышлу и соединена с ним посредством вилки, закрепленной на его конце, с возможностью поворота в вертикальной поперечной плоскости, при этом обмотки роторов левого и правого электродвигателей-генераторов соединены в отдельные контуры электроцепи, в каждый из которых включено нагрузочное сопротивление и встроены четыре датчика управления электродвигателем-генератором, установленные на тягаче: датчик положения управляемых колес тягача с нормально замкнутыми контактами, кинематически связанный с рулевым колесом тягача; датчик углового отклонения дышла прицепа в горизонтальной плоскости относительно тягача с нормально разомкнутыми контактами, кинематически связанный со шкворнем; датчик с нормально разомкнутыми контактами включения тормозов, кинематически связанный с тормозной педалью тягача; датчик с нормально разомкнутыми контактами включения передачи заднего хода тягача, кинематически связанный с коробкой передач тягача.
| Тормоз наката одноосного прицепа | 2023 |
|
RU2805422C1 |
| US 2021122415 A1, 29.04.2021 | |||
| CN 116923542 A, 24.10.2023 | |||
| Механизм стабилизации движения прицепной асимметричной машины на машинно-тракторном агрегате | 2022 |
|
RU2796272C1 |

