Изобретение относится к поршневым насосам, предназначенным преимущественно для технологий бурения нефтяных и газовых скважин, гидроразрыва пласта и поддержания пластового давления в нефтегазовой промышленности.
Реализация указанных технологий часто требует использования нескольких одновременно работающих поршневых насосов, нагнетающих жидкость в общий трубопровод, что связано с необходимостью поддержания больших подач перекачиваемой жидкости при высоком давлении.
Процесс одновременной работы группы поршневых насосов характеризуется наличием пульсаций подачи и давления перекачиваемой жидкости в гидравлической части этих насосов, трубопроводах и трубопроводной арматуре, что связано с периодическим изменением объема занимаемой ею рабочей камеры, попеременно сообщающейся со входом и выходом насоса, а также особенностями кинематики приводной части насоса.
Неравномерность подачи перекачиваемой жидкости, как правило, негативно влияет на технологический процесс закачки жидкости, а пульсации давления при работе насосов являются причиной аварий и инцидентов, связанных с повреждением трубопроводов и трубопроводной арматуры, что в целом ухудшает эксплуатационные характеристики и снижает надежность работы насосов и оборудования.
Известны способы снижения пульсаций подачи и давления перекачиваемой жидкости, предполагающие увеличение числа цилиндров в насосе и применение дополнительных устройств для снижения пульсаций. Их реализация связана с усложнением конструкции насоса, увеличением его габаритов, массы и стоимости.
Наиболее близким к предлагаемому техническому решению является способ снижения неравномерности подачи перекачиваемой жидкости двух поршневых насосов, имеющих общие всасывающий и нагнетательный трубопроводы, заключающийся в использовании электродвигателя со вторым выходным валом, соединенным с валом другого насоса, при этом насосы установлены с возможностью вращения их валов с заданным сдвигом фаз относительно друг друга (RU 2310093, опубл. 10.11.2007).
Недостатком известного способа является то, что способ не позволяет обеспечить одновременную работу более двух насосов с возможностью вращения их валов с заданным сдвигом фаз относительно друг друга. Кроме того, выход из строя электродвигателя приводит к остановке одновременно двух насосов, что снижает надежность группы поршневых насосов и ведет к простою работоспособного насосного оборудования в ее составе при реализации известного способа.
Технической задачей предлагаемого технического решения является снижение неравномерности подачи перекачиваемой жидкости группой одновременно работающих поршневых насосов, валы которых соединены с выходными валами электродвигателей, имеющих общие всасывающий и нагнетательный трубопроводы.
Технический результат - снижение неравномерности подачи перекачиваемой жидкости и, соответственно, снижение пульсаций давления перекачиваемой жидкости, повышение эксплуатационных характеристик и надежности работы группы одновременно работающих поршневых насосов, валы которых соединены с выходными валами электродвигателей, имеющих общие всасывающий и нагнетательный трубопроводы.
Указанный технический результат достигается тем, что снижение неравномерности подачи перекачиваемой жидкости группой поршневых насосов, валы которых соединены с выходными валами электродвигателей, имеющих общие всасывающий и нагнетательный трубопроводы, осуществляется при работе поршневых насосов в составе группы путем предварительного вычисления заданного сдвига фаз вращения коленчатых валов
где z - число насосов; m - число цилиндров в поршневом насосе, получения информации о текущем угловом положении вала каждого из поршневых насосов, определении сдвига фаз вращения валов этих насосов относительно друг друга, обеспечение положения валов поршневых насосов с заданным сдвигом фаз относительно друг друга и последующим вращении валов поршневых насосов с заданным сдвигом фаз относительно друг друга за счет использования регулируемого привода, при этом поддержание заданного сдвига фаз вращения коленчатых валов поршневых насосов производят непрерывно при работе поршневых насосов.
Снижение неравномерности подачи перекачиваемой жидкости группой поршневых насосов осуществляется за счет сдвига фаз вращения валов насосов. Сдвиг фаз вращения валов насосов задается исходя из предварительно рассчитанного углового смещения положения валов насосов относительно друг друга. Расчет углового смещения положения валов насосов относительно друг друга зависит от числа поршневых насосов, объединяемых в группу, при этом учитывается число цилиндров у каждого из этих насосов.
Заданный сдвиг фаз вращения коленчатых валов для группы поршневых насосов может быть определен угловым смещением положения коленчатых валов относительно друг друга по аналогии с многоцилиндровым поршневым насосом (Касьянов В.М. Гидромашины и компрессоры, М., «Недра», 1981, стр. 99).
Соответственно, заданный сдвиг фаз вращения коленчатых валов для группы поршневых насосов одностороннего действия:
где z - число насосов; m - число цилиндров в поршневом насосе.
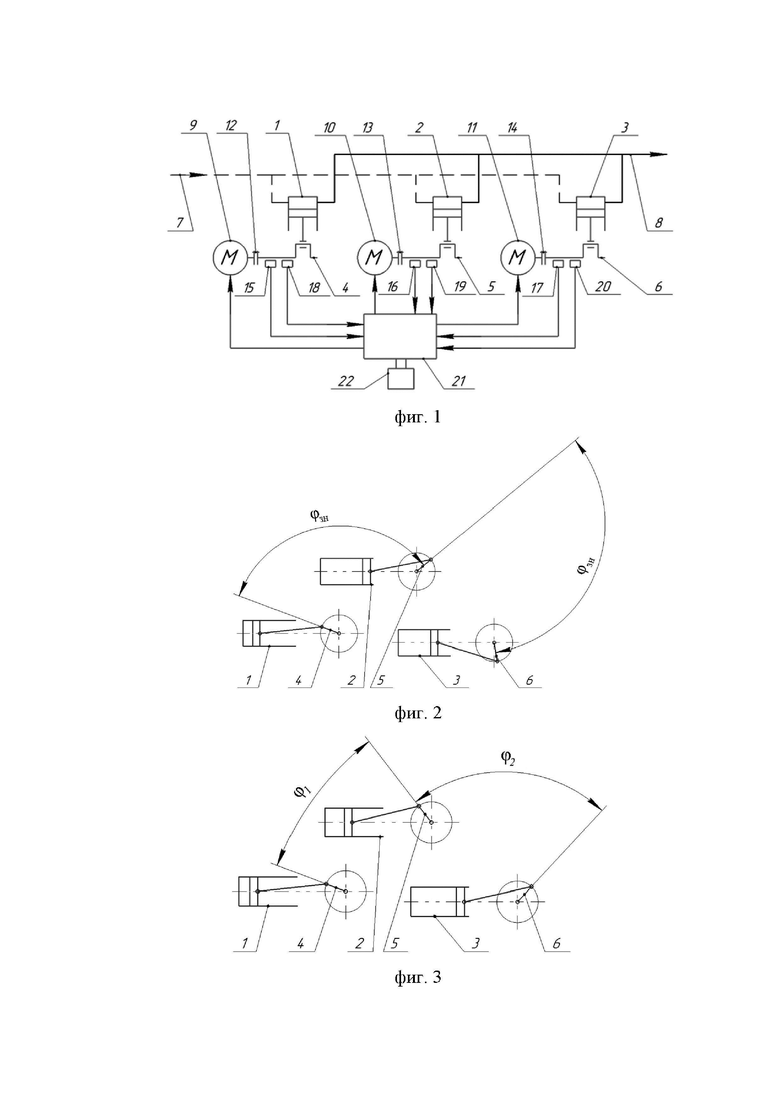
Изобретение иллюстрируется чертежами, где на фиг.1 изображена общая схема устройства для реализации способа, на фиг.2 и 3 - схемы сдвига фаз вращения коленчатых валов поршневых насосов. Рассматриваемая группа состоит из трех поршневых насосов, последние являются одноцилиндровыми насосами одностороннего действия.
В общем случае число поршневых насосов может быть два и больше, а их конструкция может отличаться от рассматриваемых поршневых насосов.
Три поршневых насоса 1, 2, 3 включают коленчатые валы 4, 5, 6 и имеют общие всасывающий 7 и нагнетательный 8 трубопроводы. Коленчатые валы 4, 5, 6 поршневых насосов 1, 2, 3 соединены с выходными валами электродвигателей 9, 10, 11 с помощью муфт 12, 13, 14. При вращении коленчатых валов 4, 5, 6 поршневых насосов 1, 2, 3 текущие угловые скорости вращения коленчатых валов 4, 5, 6 поршневых насосов 1, 2, 3 измеряются датчиками скорости вращения вала 15, 16, 17, текущие угловые положения коленчатых валов 4, 5, 6 измеряются датчиками положения вала 18, 19, 20. Информация от датчиков скорости вращения вала 15, 16, 17 и датчиков положения вала 18, 19, 20 поступает в блок управления 21. В качестве блока управления 21 может быть использована электронная вычислительная машина, станция управления, либо другое устройство, которое включает комплекс технических, аппаратных и программных средств, предназначенных для автоматической обработки информации, вычислений, автоматического регулирования и управления. В блоке управления 21 определяются текущая угловая скорость вращения и текущее угловое положение каждого вала 4, 5, 6 поршневого насоса 1, 2, 3. Информация о текущем угловом положении коленчатых валов 4, 5, 6 поршневых насосов 1, 2, 3 позволяет определить сдвиг фаз вращения коленчатых валов 4, 5, 6 этих насосов относительно друг друга. Блок управления 21 позволяет производить регулирование угловой скорости вращения выходных валов электродвигателей 9, 10, 11, что дает возможность осуществлять регулирование угловой скорости вращения коленчатых валов 4, 5, 6 поршневых насосов 1, 2, 3, в частности, обеспечивать заданный сдвиг фаз вращения коленчатых валов 4, 5, 6 поршневых насосов 1, 2, 3 и поддерживать одинаковую угловую скорость вращения коленчатых валов 4, 5, 6 поршневых насосов 1, 2, 3. Блок управления 21 подключается к источнику электрической энергии 22.
Способ реализуется следующим образом.
При подключении блока управления 21 к источнику электрической энергии 22 блок управления 21 вычисляет заданный сдвиг фаз вращения коленчатых валов
где z=3 - число насосов; m=1 - число цилиндров в поршневом насосе, и получает информацию о текущем угловом положении коленчатых валов 4, 5, 6 от датчиков положения вала 18, 19, 20. Информация о текущем угловом положении коленчатых валов 4, 5, 6 позволяет определить текущий сдвиг фаз ϕ1 и ϕ2 вращения этих валов относительно друг друга (фиг. 2).
Если текущий сдвиг фаз вращения коленчатых валов 4, 5, 6 относительно друг друга равен заданному сдвигу фаз вращения коленчатых валов, т.е. ϕ1 = ϕзн=120° между коленчатыми валами 4 и 5 и ϕ2 = ϕзн=120° между коленчатыми валами 5 и 6, то блок управления 21 включает в работу электродвигатели 9, 10, 11 и обеспечивает необходимую угловую скорость вращения выходных валов электродвигателей 9, 10, 11 и, соответственно, коленчатых валов 4, 5, 6 при поддержании заданного сдвига фаз ϕзн вращения коленчатых валов 4, 5, 6 на основании информации от датчиков положения вала 18, 19, 20 и датчиков скорости вращения вала 12, 13, 14 путем использования регулируемого привода для одновременного синхронного регулирования угловой скорости вращения выходных валов электродвигателей 9, 10, 11.
Если при подключении блока управления 21 к источнику электрической энергии 22 текущий сдвиг фаз вращения коленчатых валов 4, 5, 6 относительно друг друга отличается от заданного сдвига фаз вращения коленчатых валов, например ϕ1 ≠ ϕзн и/или ϕ2 ≠ ϕзн (фиг. 3), то блок управления 21 осуществляет регулирование углового смещения положения коленчатых валов 4, 5, 6 относительно друг друга до достижения заданного сдвига фаз вращения коленчатых валов ϕзн = 120° путем изменения положения коленчатых валов 4, 5, 6 следующим образом. В этом случае один из коленчатых валов 4, 5 или 6 назначается в качестве базового, например коленчатый вал 4, относительно которого отсчитывается сдвиг фаз вращения коленчатых валов - коленчатого вала 5 относительно коленчатого вала 4 и коленчатого вала 6 относительно коленчатого вала 5. При другом числе поршневых насосов в группе алгоритм отсчета сдвига фаз вращения коленчатых валов аналогичен. Блок управления 21 осуществляет управляющее воздействие на электродвигатели 10 и 11, поворачивая коленчатые валы 5 и 6 до достижения заданного сдвига фаз вращения коленчатых валов ϕзн = 120°, коленчатый вал 4 при этом остается неподвижным. Далее блок управления 21 включает в работу электродвигатели 9, 10, 11 и обеспечивает необходимую угловую скорость вращения коленчатых валов 4, 5, 6 при поддержании заданного сдвига фаз вращения, как это было описано ранее.
В процессе работы поршневых насосов 1, 2, 3 заданный сдвиг фаз вращения коленчатых валов 4, 5, 6 непрерывно поддерживается блоком управления 21. Если в процессе работы поршневых насосов 1, 2, 3 заданный сдвиг фаз вращения коленчатых валов 4, 5, 6 по какой-то причине нарушается, то это событие определяется блоком управления 21 на основании информации от датчиков положения вала 18, 19, 20. В этом случае один из коленчатых валов 4, 5 или 6 назначается в качестве базового, например коленчатый вал 4, относительно которого отсчитывается сдвиг фаз вращения коленчатых валов - коленчатого вала 5 относительно коленчатого вала 4 и коленчатого вала 6 относительно коленчатого вала 5. Блок управления 21 поддерживает скорость вращения коленчатого вала 4 и осуществляет управляющее воздействие на электродвигатели 10 и 11, кратковременно повышая или уменьшая угловые скорости вращения коленчатого вала 5 и коленчатого вала 6 до достижения заданного сдвига фаз вращения коленчатых валов ϕзн = 120°. Далее блок управления 21 обеспечивает необходимую угловую скорость вращения коленчатых валов 4, 5, 6 при поддержании заданного сдвига фаз вращения этих валов, как это было описано выше.
Пример выполнения предлагаемого способа.
В качестве насосов 1, 2, 3 могут быть использованы плунжерные насосы производства ООО «Завод «Синергия» (г. Пермь) модели СИН 63. В качестве приводных электродвигателей 9, 10, 11 предполагается применение вентильных электродвигателей по типу выпускаемых ООО «ЭПУ Сервис» (г. Когалым) вентильных электродвигателей для станков-качалок или их аналогов от компании «Lex» (ОАЭ). В качестве датчиков скорости вращения 15, 16, 17 и датчиков положения вала 18, 19, 20 могут быть использованы универсальные датчики вращения вала от компании HEIDENHAIN (Германия). Для управления вентильными электродвигателями в качестве блока управления 21 подойдут станции управления, выпускаемые, например, АО «Новомет-Пермь» (г. Пермь) или ООО «ЭПУ Сервис» (г. Когалым). В качестве источника электрической энергии 22 можно использовать, например, электросеть нефтепромысла или несколько дизель-электрических установок производства ООО «Производственная компания «Дизельные Системы»» (г. Ярославль).
Преимущества заявляемого способа состоят в том, что обеспечивается возможность эффективного снижения неравномерности подачи и пульсаций давления перекачиваемой жидкости при работе двух и более поршневых насосов, объединенных в группу, валы которых соединены с выходными валами электродвигателей, имеющих общие всасывающий и нагнетательный трубопроводы за счет регулирования скорости вращения выходных валов электродвигателей путем использования регулируемого привода. При этом, если происходит исключение из одновременной работы отдельных насосов, например при выходе из строя электродвигателей или по другим причинам, то способ позволяет обеспечить снижение неравномерности подачи перекачиваемой жидкости оставшихся в работе поршневых насосов путем изменения сдвига фаз вращения валов насосов, что обеспечивает надежность работы группы поршневых насосов и минимальные простои работоспособного оборудования в ее составе.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАСОСНАЯ УСТАНОВКА | 2006 |
|
RU2310093C1 |
| ГИДРОПУЛЬСАТОРНАЯ ИСПЫТАТЕЛЬНАЯ МАШИНА ДЛЯ ЦИКЛИЧЕСКИХ ИСПЫТАНИЙ ОБРАЗЦОВ МАТЕРИАЛОВ ИЛИ ИЗДЕЛИЙ НА УСТАЛОСТЬ | 2010 |
|
RU2454652C1 |
| Способ увеличения равномерности подачи поршневого насоса | 2022 |
|
RU2814338C1 |
| ГИДРОПРИВОДНОЙ ВОЗВРАТНО-ПОСТУПАТЕЛЬНЫЙ НАСОС ДВОЙНОГО ДЕЙСТВИЯ | 2004 |
|
RU2258156C1 |
| СИСТЕМА ПОДАЧИ ТОПЛИВА ДИЗЕЛЯ | 2019 |
|
RU2730540C1 |
| НАСОСНАЯ УСТАНОВКА С ЭЛЕКТРОГИДРАВЛИЧЕСКИМ ПРИВОДОМ | 2016 |
|
RU2613150C1 |
| УСТАНОВКА ДЛЯ НАГНЕТАНИЯ ГАЗОЖИДКОСТНОЙ СМЕСИ | 1997 |
|
RU2151911C1 |
| БУРОВОЙ НАСОС ПРЯМОГО ПРИВОДА С ПОСТОЯННЫМИ МАГНИТАМИ | 2010 |
|
RU2575721C2 |
| НАСОС ГИДРОРАЗРЫВА ПЛАСТОВ | 2024 |
|
RU2827929C1 |
| ВОЗВРАТНО-ПОСТУПАТЕЛЬНЫЙ НАСОС | 2016 |
|
RU2695176C1 |
Изобретение относится к поршневым насосам, предназначенным преимущественно для технологий гидроразрыва пласта и поддержания пластового давления в нефтегазовой промышленности. В способе снижения неравномерности подачи перекачиваемой жидкости группой одновременно работающих поршневых насосов 1, 2, 3, имеющих общие всасывающий и нагнетательный трубопроводы 7 и 8, коленчатые валы 4, 5, 6 насосов соединяют с выходными валами электродвигателей 9, 10, 11. Предварительно вычисляют заданный сдвиг фаз вращения валов 4, 5, 6, получают информацию о текущем угловом положении вала 4, 5, 6 каждого из насосов 1, 2, 3, определяют сдвиг фаз вращения валов 4, 5, 6 относительно друг друга, обеспечивают положение валов 4, 5, 6 с заданным сдвигом фаз относительно друг друга и последующее вращение валов 4, 5, 6 с заданным сдвигом фаз относительно друг друга путем использования регулируемого привода. Поддержание заданного сдвига фаз вращения валов 4, 5, 6 производят непрерывно при работе насосов. Изобретение направлено на снижение пульсаций давления перекачиваемой жидкости, повышение эксплуатационных характеристик и надежности работы группы одновременно работающих поршневых насосов. 3 ил.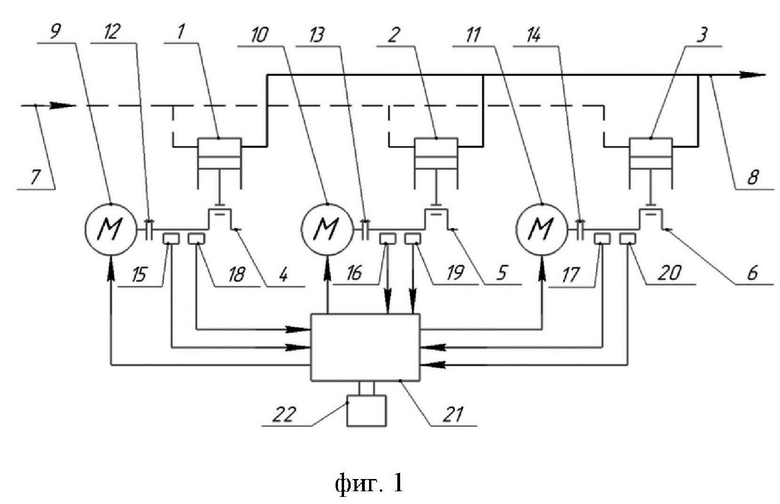
Способ снижения неравномерности подачи перекачиваемой жидкости группой одновременно работающих поршневых насосов, имеющих общие всасывающий и нагнетательный трубопроводы, отличающийся тем, что валы поршневых насосов соединяют с выходными валами электродвигателей, предварительно вычисляют заданный сдвиг фаз вращения коленчатых валов
где z - число насосов; m - число цилиндров в поршневом насосе,
получают информацию о текущем угловом положении вала каждого из поршневых насосов, определяют сдвиг фаз вращения валов этих насосов относительно друг друга, обеспечивают положение валов поршневых насосов с заданным сдвигом фаз относительно друг друга и последующее вращение валов поршневых насосов с заданным сдвигом фаз относительно друг друга путем использования регулируемого привода, при этом поддержание заданного сдвига фаз вращения коленчатых валов поршневых насосов производят непрерывно при работе поршневых насосов.
| НАСОСНАЯ УСТАНОВКА | 2006 |
|
RU2310093C1 |
| RU 2012147256 А, 27.04.2014 | |||
| СПОСОБ УПРАВЛЕНИЯ И НАСОСНЫЙ АГРЕГАТ ДЛЯ ПЕРЕКАЧКИ ЖИДКОСТЕЙ | 2003 |
|
RU2258835C1 |
| US 2020088179 A1, 19.03.2020 | |||
| US 6244838 B1, 12.06.2001. | |||

