Изобретение относится к винтокрылым летательным аппаратам с двумя и более винтами и может быть использовано при создании беспилотных летательных аппаратов различного назначения.
Известны мультикоптеры: летательный аппарат по патенту РФ на изобретение №2656932, ударный мультикоптер по патенту РФ на полезную модель №188791, где функциональные возможности летательных аппаратов позволяют осуществлять вертикальный взлет и посадку и осуществлять горизонтальный полет по самолетному типу с преимуществами в экономичности и скорости относительно летательных аппаратов вертолетного типа.
Недостатком данных мультикоптеров являются сложность технического исполнения, так как использование ВМГ расположенных на выносных балках (лучах) с приводом от ДВС требует сложной системы приводов для осуществления вращения воздушных винтов. Применение в качестве двигательной установки электродвигателей расположенных в ВМГ упрощает систему приводов отсутствием лишних движущих элементов. Однако это требует применения мощных и тяжелых аккумуляторных батарей. Это усложняет крепеж всей конструкции, усложняет обеспечение надежности конструкции, ограничивает возможность наращивания грузоподъемности.
Наиболее близким к предлагаемому изобретению по назначению и общим существенным признакам является техническое решение «Летательный аппарат» (патент РФ на изобретение №2656932). Прототип является мультикоптером и содержит средства тяги с несущими винтами и фюзеляж с выносными балками, на которых установлены рамы с возможностью поворота вокруг оси балок на угол 360°, а средства тяги с несущими винтами размещены в кольцевых каналах, установленных в рамах с возможностью поворота на угол 360° вдоль оси балок фюзеляжа. Однако данное техническое решение имеет меньшую грузоподъемность и продолжительность полета, которая обусловлена большим весом и недостаточной емкостью АКБ применяемых для питания электродвигателей воздушных винтов. Кроме того, выход из строя хотя бы одного из двигателей ВМГ мультикоптера, гарантированно ведет к его падению. Опытным путем доказано, что возможность сохранить устойчивость мультикоптера в полете является увеличение количества воздушных винтов от 6 до 8 и более.
Технической проблемой является разработка мультикоптера с полноповоротным рулем управления, гибридной двигательной установкой и комбинированными винтомоторными группами.
Техническими результатами мультикоптера с полноповоротным рулем направления, гибридной двигательной установкой и комбинированными винтомоторными группами (ВМГ) являются:
1. надежность и использование в конструкции данного мультикоптера винтомоторных групп комбинированного назначения совместно с гибридной двигательной установкой;
2. возможность создавать мультикоптеры повышенной грузоподъемности и увеличенной дальности полета без усложнения конструкции;
3. возможность создавать мультикоптеры различного назначения: пассажирский, грузовой, комбинированный, а также многоцелевой военный летательный аппарат;
4. повышение безопасности полета и эффективности управления;
5. возможность использования ВМГ состоящих из ВМГ мультикоптера и FPV-дронов в качестве комбинированных ВМГ и ДВС для зарядки аккумуляторов летательного аппарата (мультикоптера) и аккумуляторов FPV-дронов во время полета, что делает летательный аппарат незаменимым при применении в военном деле, при ликвидации ЧС в районах тайги, тундры, степей, пустынь и других открытых, малонаселенных районов;
6. возможность использования отделения и самостоятельного полета FPV-дронов во время полета мультикоптера для разведки маршрута полета и для проведения различных видов работ.
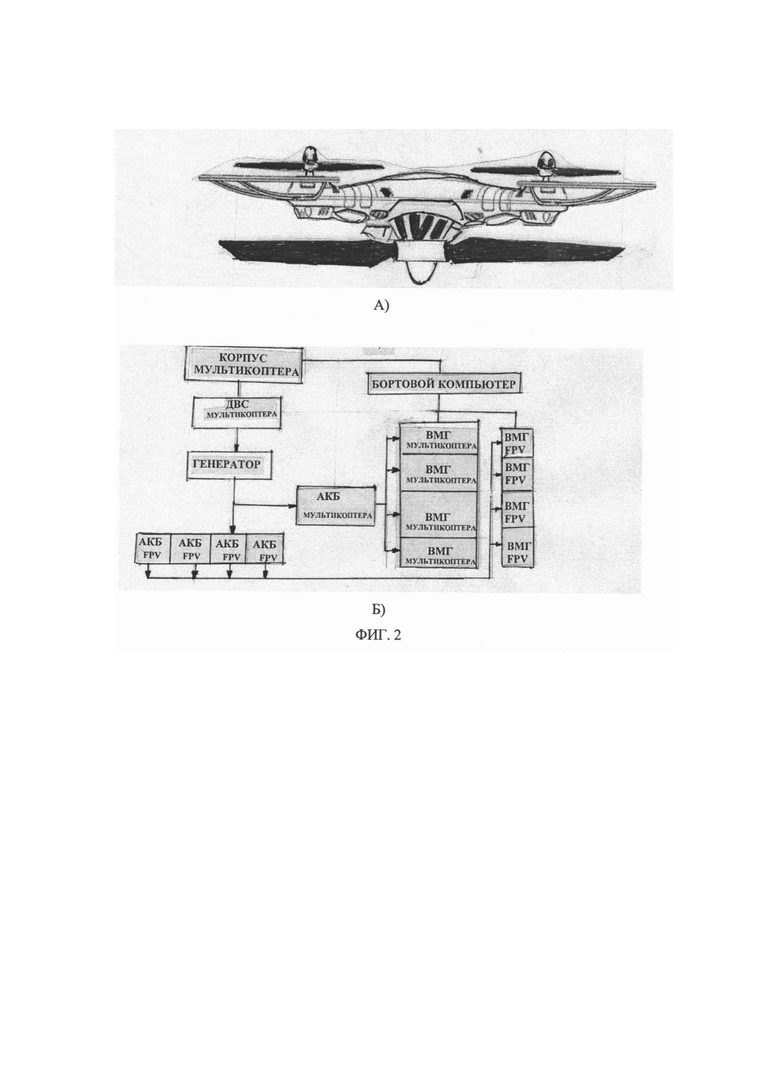
Указанный технический результат достигается тем, что мультикоптер с полноповоротным рулем направления, гибридной двигательной установкой и комбинированными винтомоторными группами, согласно решению содержит шасси, на котором установлен двигатель внутреннего сгорания (ДВС), соединенный с генератором и по меньшей мере четыре ВМГ выполненными в виде FPV-дронов с электрическими двигателями, расположенными сверху на лучах мультикоптера, причем, указанные по меньшей мере четыре FPV-дрона имеют возможность отделения от мультикоптера, FPV-дроны имеют по меньшей мере четыре ВМГ с электродвигателями, имеющие каждый воздушный винт, а снизу на лучах мультикоптера расположены ВМГ непосредственно мультикоптера, винты электродвигателей которого расположены в параллельных плоскостях, при этом тяга создаваемая воздушным винтом ВМГ непосредственно мультикоптера по меньшей мере соответствует тяге воздушных винтов электродвигателей FPV-дрона.
Мультикоптер дополнительно содержит компьютер, входящий в состав бортового навигационно-пилотажного комплекса, установленный на шасси с возможностью обмена данными с двигателями мультикоптера и FPV-дронов, источник электропитания -аккумуляторные батареи (АКБ), установленные в фюзеляже и соединенные с двигателями ВМГ мультикоптера, генератор соединенный с ДВС и зарядным устройством источника питания (АКБ) мультикоптера и источников питания (АКБ) FPV-дронов и осуществляющий при работе ДВС зарядку источника питания (АКБ) мультикоптера и (АКБ) FPV-дронов с возможностью осуществлять работу электродвигателей ВМГ воздушных винтов мультикоптер и FPV-дронов в полете при необходимости, антенны, установленные на шасси с возможностью обмена данными с компьютером, входящим в состав бортового навигационно-пилотажного комплекса, который позволяет осуществлять управление мультикоптером во время его полета и ретранслировать сигналы управления FPV-дронами, после их отделения от мультикоптера и самостоятельного полета.
Полученная таким образом комбинированная ВМГ, состоящая из FPV-дрона и непосредственно ВМГ мультикоптера с электродвигателями, имеет возможность поворота вокруг оси луча мультикоптера на 360° с возможностью фиксации.
Сущность изобретения поясняется чертежами, где:
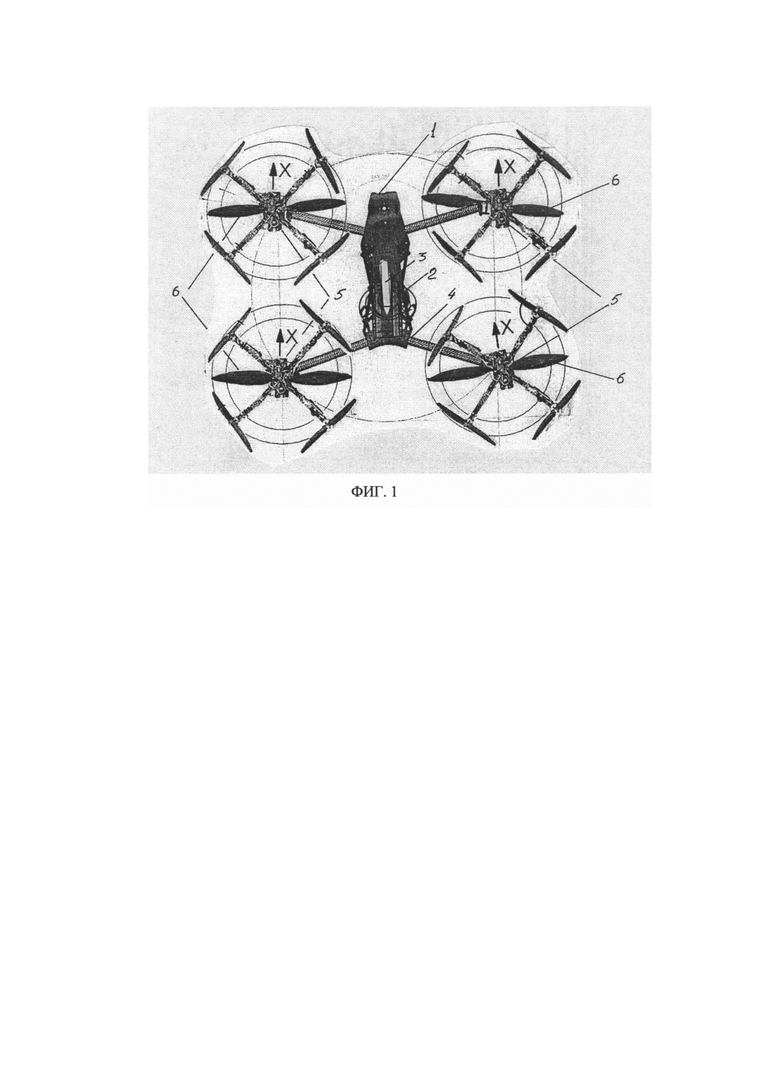
на фиг. 1 представлена схема предлагаемого мультикоптера, общий вид,
на фиг. 2 схематично представлена блок схема основных узлов и механизмов мультикоптера;
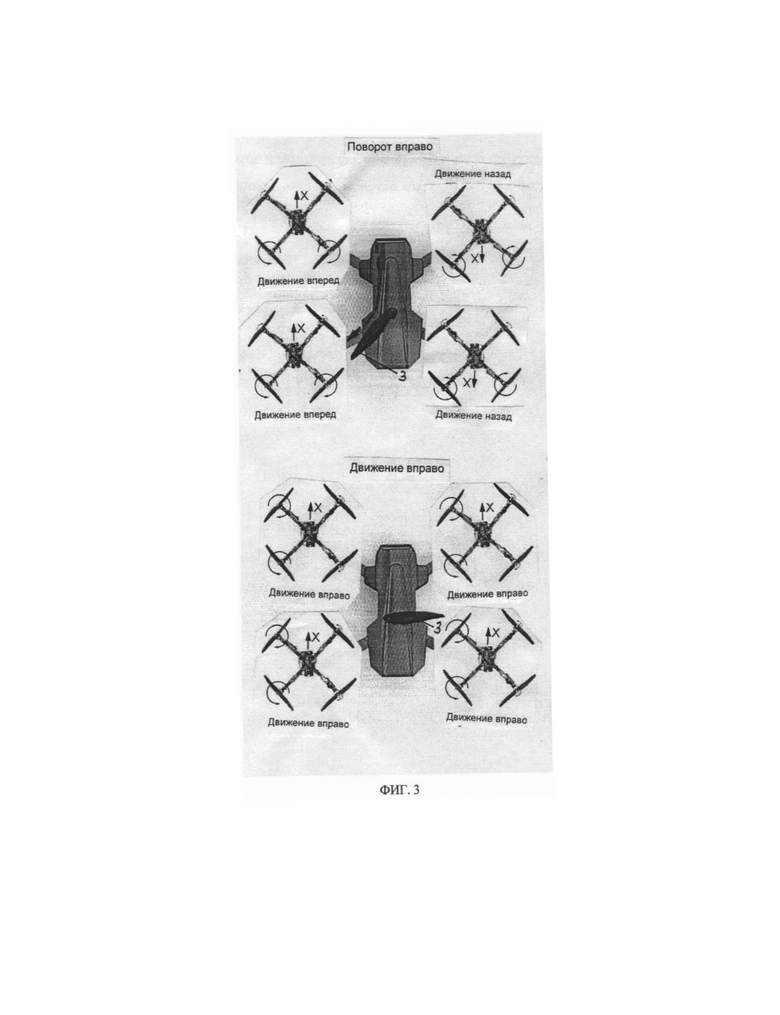
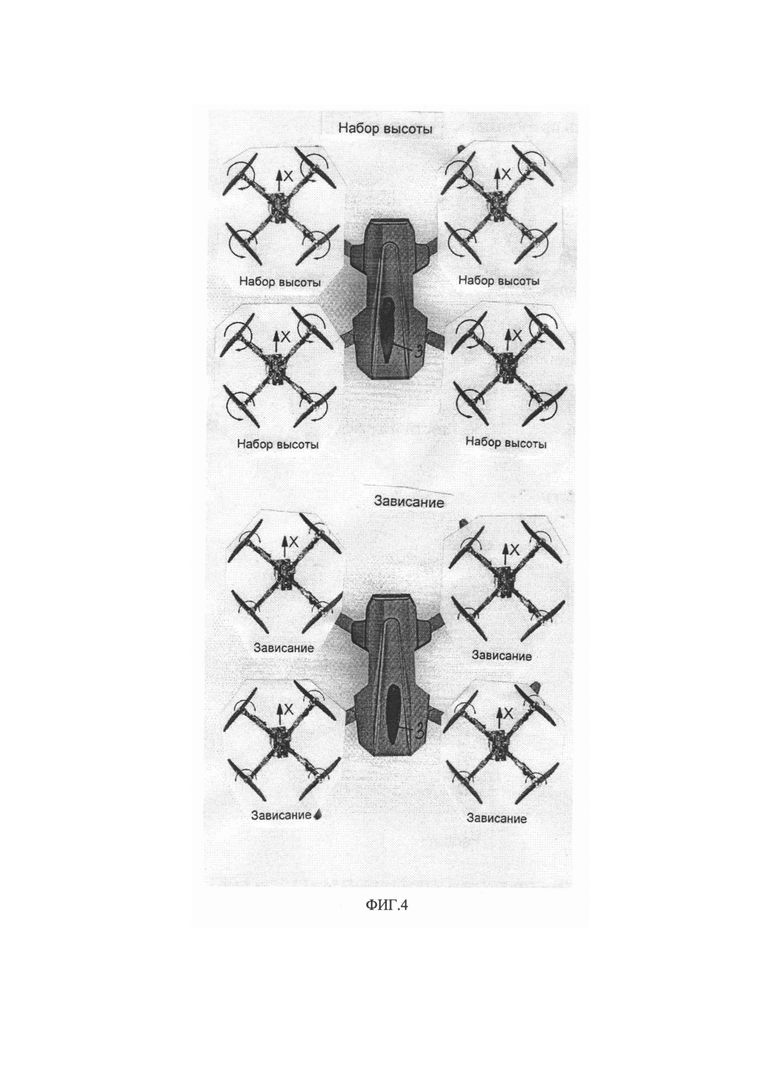
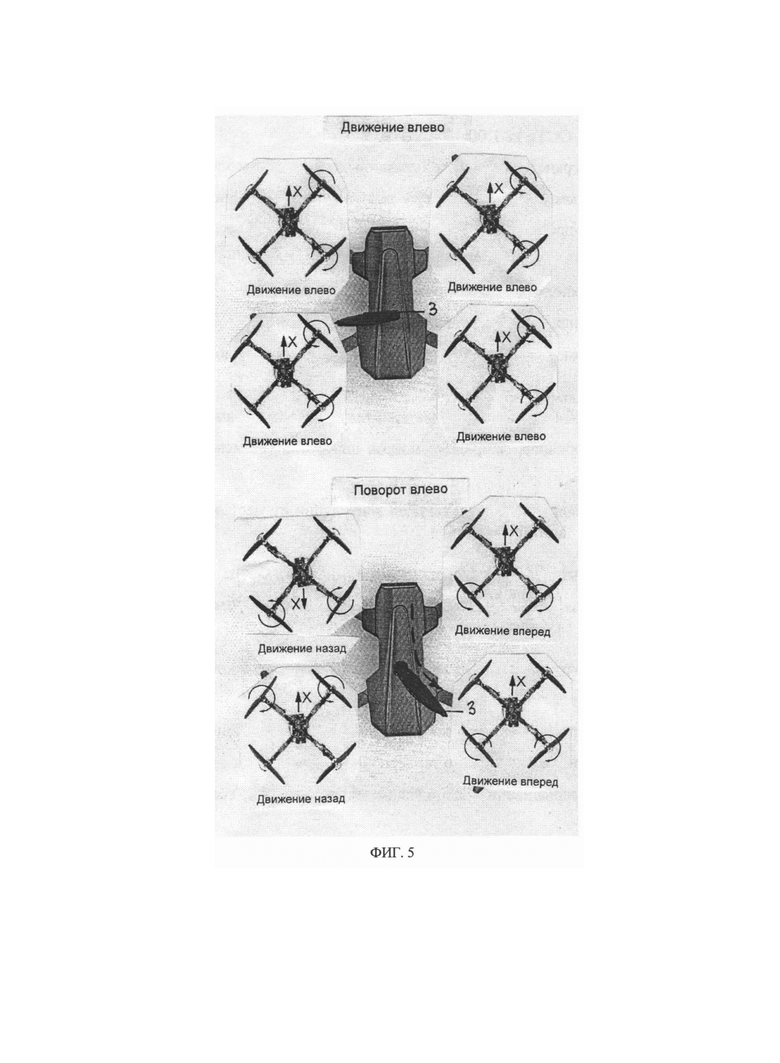
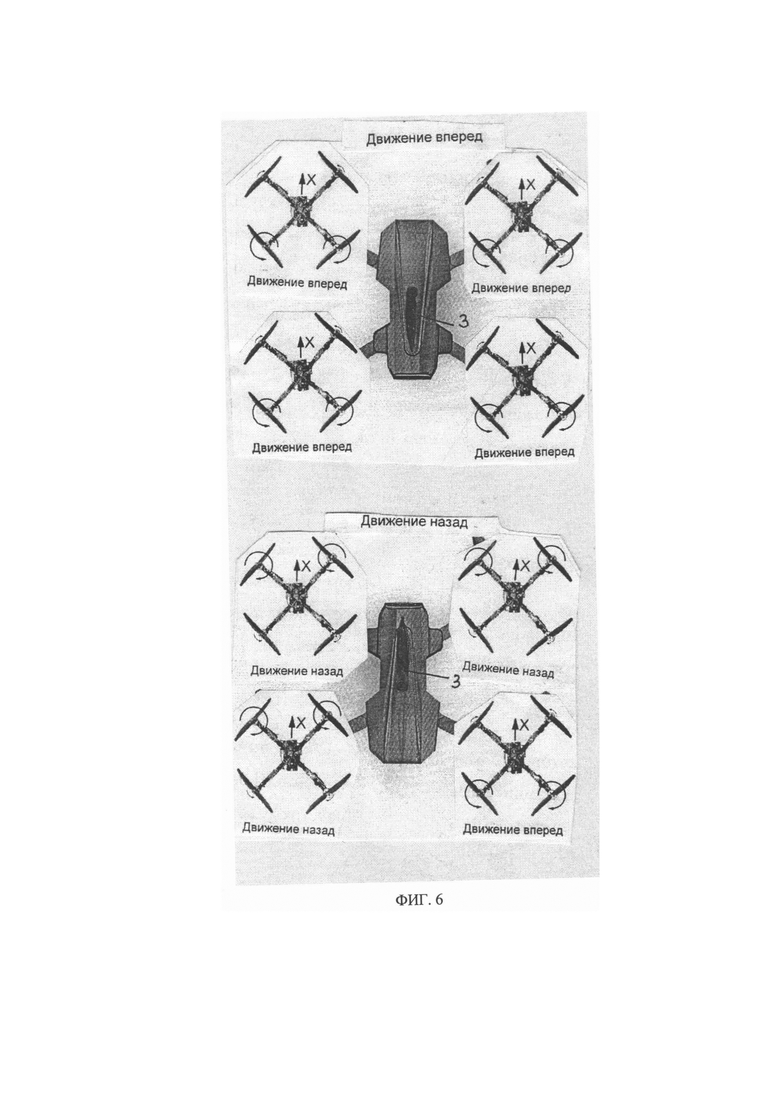
на фиг. 3, 4, 5, 6 представлена ориентация средств тяги и полноповоротного руля управления мультикоптера относительно фюзеляжа при взлете, посадке, горизонтальном полете, движении вправо, влево, вперед, назад;
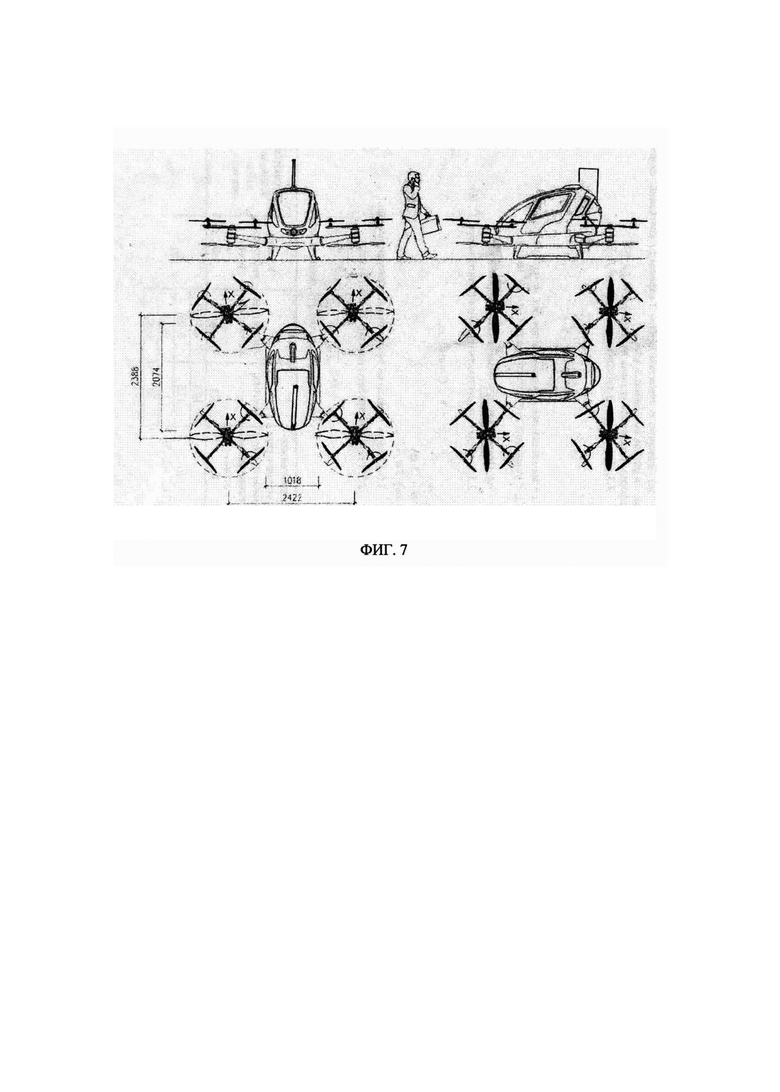
на фиг. 7 представлен вариант использования предложенной схемы мультикоптера в качестве воздушного такси.
Мультикоптер с полноповоротным рулем направления, комбинированными ВМГ и гибридной двигательной установкой содержит фюзеляж 1, выполненный в аэродинамической форме, где в фюзеляже установлен ДВС 2 и полноповоротный руль направления 3 лучами рамы 4 и размещенными на них FPV-дронами 5, ВМГ с электродвигателями и воздушными винтами 6 установлены на лучах рамы 4 с возможностью поворота вокруг оси лучей рамы на 360 градусов с возможностью фиксации.
Мультикоптер дополнительно содержит, компьютер, входящий в состав бортового навигационно-пилотажного комплекса, генератор, зарядное устройство, аккумуляторные батареи соответствующие приводы и командные системы управления им (на чертежах не показаны) для осуществления согласованного совместного или раздельного управления FPV-дронами 5, ВМГ с электродвигателями и воздушными винтами мультикоптера 6 и FPV-дронов 5, относительно фюзеляжа 1, являющиеся общеизвестными техническими средствами, применяемыми в существующих конструкциях летательных аппаратов [2, 3, 4].
Мультикоптер с воздушными винтами комбинированного назначения и гибридной двигательной установкой винтомоторных групп работает следующим образом. Взлет (посадка) мультикоптера осуществляется вертикально «по вертолетному» остальные маневры, работа винтов ВМГ, положение полноповоротного руля управления представлена на фиг.3, 4, 5, 6 с вытекающими отсюда преимуществами винтокрылых летательных аппаратов. На фиг.7 представлен вариант использования предложенной схемы мультикоптера в качестве воздушного такси.
Управление полетом принципиально происходит так же, как при радиальном расположении ВМГ с электродвигателями. При увеличении оборотов задних ВМГ мультикоптера и ВМГ FPV-дронов и уменьшении на передних мультикоптер движется вперед (фиг. 6.). Аналогичным образом происходит движение мультикоптера назад. При синхронном манипулировании левой и правой группами ВМГ мультикоптер и ВМГ FPV-дронов будет двигаться вправо или влево (фиг. 3, 5). Поворот мультикоптера производится замедлением вращения, например, винтов, крутящихся по часовой стрелке или наоборот.Но при этом контролер полета FPV-дронов будет работать иначе. При повороте вправо левые FPV-дроны будут осуществлять своими ВМГ движение вперед, а правые FPV-дроны движение назад. При повороте влево правые FPV-дроны будут осуществлять своими ВМГ движение вперед, а левые FPV-дроны движение назад (фиг. 3, 4, 5). Для возможности увеличения эффективности управления мультикотером установлен полноповоротный руль управления, расположенный в верхней части корпуса фюзеляжа мультикоптера. При этом мультикоптер будет осуществлять возможность поворота вправо или влево поворотом руля направления при движении вперед или назад. При движении влево или вправо руль поворота будет принимать положение соответствующее наименьшему аэродинамическому сопротивлению движению мультикоптера, т.е. угол к направлению движения будет равен 0 градусов.
При отделении FPV-дрона от мультикоптера и перехода его в самостоятельный полет ВМГ с электродвигателями мультикоптера или будет осуществлять поворот вокруг оси луча мультикоптера на 180° и увеличивая при помощи увеличения оборотов воздушного винта тяговое усилие на величину компенсирующую тягу ВМГ отделившегося FPV-дрона или работать в прежнем режиме, тем самым обеспечивая ослабление нежелательных переходных процессов, возникающих при переходе ВМГ мультикоптера из одного положения в другое, сохраняя стабильность полета мультикоптера [1, 2, 3, 4]. Аналогично будет происходить и отделение остальных FPV-дронов. Бортовой компьютер мультикоптера, входящий в состав бортового навигационно-пилотажного комплекса, установленный на шасси при помощи антенн установленных на шасси производит обмен данными с системами управления FPV-дронов и ретранслирует сигналы управления FPV-дронами, после их отделения от мультикоптера и самостоятельного полета.
Перемещение от места базирования до места назначения может осуществляться «по схеме полета мультикоптера с применением ВМГ мультикоптера и ВМГ FPV-дронов при ориентации средств тяги относительно фюзеляжа, как представлено на фиг., при этом используются преимущества летательных аппаратов мультикоптерной схемы в маневренности и экономичности полета [1, 2, 3, 4], а размещение дополнительных ВМГ FPV-дронов с ДВС оказывает положительное воздействие на его аэродинамические характеристики по грузоподъемности, скорости и безопасности и расстоянии полета. При этом мультикоптер с полноповоротным рулем управления, комбинированными ВМГ и гибридной двигательной установкой может работать в двух вариантах. Первый, при работе ДВС вращает генератор осуществляя подзарядку АКБ мультикоптера и АКБ FPV-дронов при этом воздушные винты мультикоптера и FPV-дронов работают совместно осуществляя полет мультикоптера. При изменении режима полета и маневрировании компьютер мультикоптера через контролер мультикоптера и контролеры FPV-дронов обеспечивает вращение воздушных винтов в нужных режимах, причем осуществление маневра поворота может осуществляться при помощи полноповоротного руля управления. При прибытии к месту расположения цели мультикоптер, используя маневренные возможности, осуществляет необходимые манипуляции с пространственным положением фюзеляжа для выполнения необходимых задач.
Второй вариант. При отделении FPV-дронов происходит поворот ВМГ мультикоптера вокруг оси луча на 180° со скоростью обеспечивающей стабильность полета, а воздушный винт вращается обеспечивая тягу необходимую для продолжения полета. При этом мультикоптер продолжает полет и совершает маневры в обычном режиме. При этом FPV-дроны совершает полет в автономном режиме. А мультикоптер ретранслирует сигналы управления ими операторами при необходимости.
Таким образом, в отличие от летательного аппарата стандартной (одновинтовой) схемы мультикоптер обладает высокой надежностью. Он более маневренен не содержит лишние движущие элементы и обладает малой массой. Кроме того, мультикоптер неприхотлив в эксплуатации, поэтому его полет возможен в любую погоду.
Источники информации
1. Ткачева, В. Р. Использование гибридной силовой установки в мультикоптерах /B.Р. Ткачева. - Текст: непосредственный // Молодой ученый. - 2015. - №24 (104). - C. 146-149. - URL: https://moluch.ru/archive/104/24274/(дата обращения: 17.12.2021).
2. Самолет вертикального взлета и посадки. Патент США №3037721 А, МПК В64С 29/00. 05.06.1962.
3. Вертолет. Патент РФ на изобретение №2263049. МПК В64С 27/52. 27.10.2005.6.9. Богданов Ю.С., Михеев Р.Л. Конструкция вертолетов. М.: Машиностроение, 1990; URL: http://xaribda.ru/node/68. Дата обращения 27.09.2018.
4. Ружинский Е.И. Американские самолеты вертикального взлета, URL: http://coolib.eom/b/128556/read. Дата обращения 27.09.2018.
5. Афанасьев, П.П. Беспилотные летательные аппараты. Основы устройства и функционирования./ П.П. Афанасьев, И.С. Голубев, В.Н. Новиков и др. - 2-е изд., перераб.-М.:2008. - 656 с.
6. Ганин, С.М. Беспилотные летательные аппараты/С.М. Ганин, А.В. Карпенко и др. - СПб: 1999. - 160 с. wikipedia.org: свободная энциклопедия [Электронный ресурс].
| название | год | авторы | номер документа |
|---|---|---|---|
| МУЛЬТИКОПТЕР С ВОЗДУШНЫМИ ВИНТАМИ КОМБИНИРОВАННОГО НАЗНАЧЕНИЯ И ГИБРИДНОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ ВИНТОМОТОРНЫХ ГРУПП | 2022 |
|
RU2803214C1 |
| Экраноплан с двигательной установкой, выполненной по схеме мультикоптера | 2023 |
|
RU2833275C1 |
| Летательный аппарат короткого взлета и посадки с газодинамическим управлением | 2018 |
|
RU2711633C2 |
| УНИВЕРСАЛЬНЫЙ МНОГОФУНКЦИОНАЛЬНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ КВАДРОКОПТЕРНОГО ТИПА | 2024 |
|
RU2835704C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ И/ИЛИ С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ С УКОРОЧЕННЫМ ПРОБЕГОМ | 2021 |
|
RU2764311C1 |
| СКОРОСТНОЙ ГИБРИДНЫЙ СООСНЫЙ ЭЛЕКТРОВЕРТОЛЕТ | 2021 |
|
RU2753444C1 |
| Способ синхронизации и обеспечения симметрии тяги воздушных винтов силовой установки летательного аппарата и электрическая синхронизирующая трансмиссия для его реализации | 2016 |
|
RU2646696C1 |
| МУЛЬТИКОПТЕР С ЛИНЕЙНЫМ РАСПОЛОЖЕНИЕМ ВИНТОМОТОРНЫХ ГРУПП | 2014 |
|
RU2577822C2 |
| БЕСПИЛОТНЫЙ КОНВЕРТОПЛАН КРИШТОПА (БКК), СПОСОБ ФУНКЦИОНИРОВАНИЯ БКК И СПОСОБ ФУНКЦИОНИРОВАНИЯ УСТРОЙСТВА ВЕРТИКАЛЬНОГО ЗАПУСКА ПРИ ИСПОЛЬЗОВАНИИ С БКК | 2022 |
|
RU2809067C1 |
| Архитектура "Топос" электрического привода воздушного винта | 2019 |
|
RU2786265C2 |
Изобретение относится к области авиации, в частности к конструкциям беспилотных летательных аппаратов. Мультикоптер с полноповоротным рулем направления, гибридной двигательной установкой и комбинированными винтомоторными группами содержит шасси, на котором установлен двигатель внутреннего сгорания (ДВС), соединенный с генератором, и по меньшей мере четыре ВМГ, выполненные в виде FPV-дронов с электрическими двигателями, расположенными сверху на лучах мультикоптера. Указанные по меньшей мере четыре FPV-дрона имеют возможность отделения от мультикоптера. FPV-дроны имеют по меньшей мере четыре ВМГ с электродвигателями, имеющими каждый воздушный винт. Снизу на лучах мультикоптера расположены ВМГ непосредственно мультикоптера, винты электродвигателей которого расположены в параллельных плоскостях. Тяга, создаваемая воздушным винтом ВМГ непосредственно мультикоптера, по меньшей мере соответствует тяге воздушных винтов электродвигателей FPV-дрона. Обеспечивается возможность повышения грузоподъемности и дальности полета, повышение безопасности полета и эффективности управления. 2 з.п. ф-лы, 7 ил.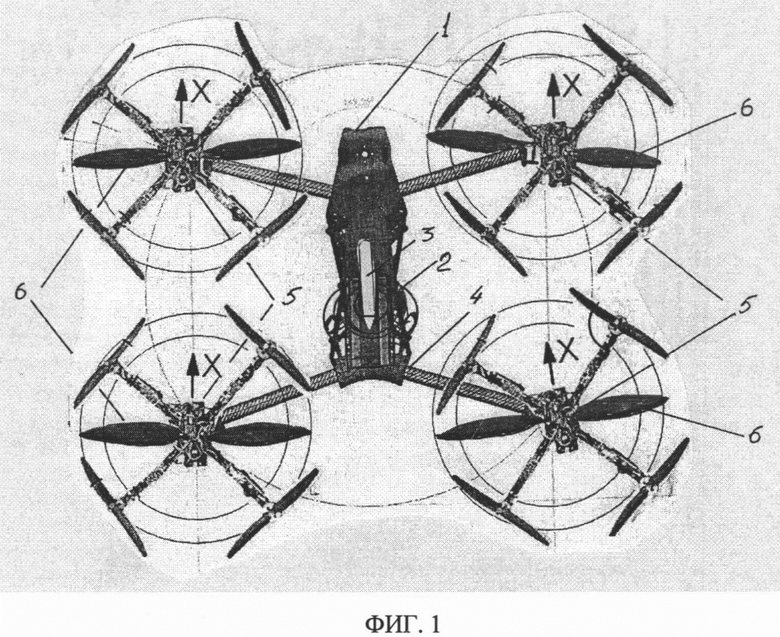
1. Мультикоптер с полноповоротным рулем направления, гибридной двигательной установкой и комбинированными винтомоторными группами, характеризующийся тем, что содержит шасси, на котором установлен двигатель внутреннего сгорания (ДВС), соединенный с генератором, и по меньшей мере четыре ВМГ, выполненные в виде FPV-дронов с электрическими двигателями, расположенными сверху на лучах мультикоптера, причем указанные по меньшей мере четыре FPV-дрона имеют возможность отделения от мультикоптера, FPV-дроны имеют по меньшей мере четыре ВМГ с электродвигателями, имеющие каждый воздушный винт, а снизу на лучах мультикоптера расположены ВМГ непосредственно мультикоптера, винты электродвигателей которого расположены в параллельных плоскостях, при этом тяга, создаваемая воздушным винтом ВМГ непосредственно мультикоптера, по меньшей мере соответствует тяге воздушных винтов электродвигателей FPV-дрона.
2. Мультикоптер по п. 1, отличающийся тем, что дополнительно содержит компьютер, входящий в состав бортового навигационно-пилотажного комплекса, установленный на шасси с возможностью обмена данными с двигателями мультикоптера и FPV-дронов, источник электропитания - аккумуляторные батареи (АКБ), установленные в фюзеляже и соединенные с двигателями ВМГ мультикоптера, генератор, соединенный с ДВС и зарядным устройством источника питания (АКБ) мультикоптера и источников питания (АКБ) FPV-дронов и осуществляющий при работе ДВС зарядку источника питания (АКБ) мультикоптера и (АКБ) FPV-дронов с возможностью осуществлять работу электродвигателей ВМГ воздушных винтов мультикоптера и FPV-дронов в полете при необходимости, антенны, установленные на шасси с возможностью обмена данными с компьютером, входящим в состав бортового навигационно-пилотажного комплекса, который позволяет осуществлять управление мультикоптером во время его полета и ретранслировать сигналы управления FPV-дронами, после их отделения от мультикоптера и самостоятельного полета.
3. Мультикоптер по п. 1, характеризующийся тем, что комбинированная ВМГ имеет возможность поворота вокруг оси луча мультикоптера на 360° с возможностью фиксации.
| US 10589851 B2, 17.03.2020 | |||
| Модульный летательный аппарат и способ его вертикального взлёта | 2021 |
|
RU2777132C1 |
| US 20150115096 A1, 30.04.2015 | |||
| Летательный аппарат | 2016 |
|
RU2656932C2 |
| МУЛЬТИПЛАН | 2021 |
|
RU2766483C2 |

