Изобретение относится к области авиастроения летательных аппаратов (ЛА) типа многовинтовых вертолетов (мультикоптер).
Известны ЛА (мультикоптеры), которые имеют 4 и более винтомоторных групп (ВМГ), так же известны варианты мультикоптеров ЛА с гибридными двигательными установками типа обладающие большей грузоподъемностью и продолжительностью полета. Недостатками указанных мультикоптеров предложенных в данных технических решениях являются сложность технического исполнения, так как использование ВМГ расположенных на выносных балках (лучах) с приводом от ДВС требует сложной системы приводов для осуществления вращения воздушных винтов. Применение в качестве двигательной установки электродвигателей расположенных в ВМГ упрощает систему приводов отсутствием лишних движущих элементов. Однако это требует применения мощных и тяжелых аккумуляторных батарей. Это усложняет крепеж всей конструкции, усложняет обеспечение надежности конструкции, ограничивает возможность наращивания грузоподъемности. В отличие от ЛА стандартной (одновинтовой) схемы мультикоптер обладает высокой надежностью. Он более маневренен не содержит лишние движущие элементы и обладает малой массой. Кроме того, коптер неприхотлив в эксплуатации, поэтому его полет возможен в любую погоду.[1,2,3]
Известны мультикоптеры патенты [1,2], где функциональные возможности летательных аппаратов позволяют осуществлять вертикальный взлет и посадку и осуществлять горизонтальный полет по самолетному типу с преимуществами в экономичности и скорости относительно летательных аппаратов вертолетного типа. Наиболее близким к предлагаемому изобретению по назначению и общим существенным признакам является техническое решение «Летательный аппарат» [1]. Прототип является мультикоптером и содержит средства тяги с несущими винтами и фюзеляж с выносными балками, на которых установлены рамы с возможностью поворота вокруг оси балок на угол 360°, а средства тяги с несущими винтами размещены в кольцевых каналах, установленных в рамах с возможностью поворота на угол 360° вдоль оси балок фюзеляжа. Однако имеет меньшую грузоподьемность и продолжительность полета, которая обусловлена большим весом и недостаточной емкостью АКБ применяемых для питания электродвигателей воздушных винтов.
Одним из решений данной задачи является возможность создания ЛА, который является мультикоптером и содержит шасси, на котором установлена ВМГ с двигателем внутреннего сгорания (ЛВС) и по меньшей мере четыре ВМГ с электрическими двигателями, причем указанная ВМГ с ДВС имеет воздушный винт с автоматом перекоса, или два воздушных винта выполненных по соосной схеме.
Мультикоптер содержит фюзеляж, на котором установлена ВМГ с двигателем внутреннего сгорания (ДВС) и по меньшей мере четыре ВМГ с электрическими двигателями, причем указанная ВМГ с ДВС имеет воздушный винт с автоматом перекоса, или два воздушных винта выполненных по соосной схеме, указанные по меньшей мере четыре электродвигателя имеют каждый воздушный винт, а винт ДВС и винты электродвигателей расположены в одной плоскости или в параллельных плоскостях, при этом длина воздушного винта ВМГ с ДВС по меньшей мере вдвое больше длины воздушных винтов электродвигателей. Система также содержит компьютер, установленный на шасси с возможностью обмена данными с двигателями мультикоптера, источник электропитания, установленный на шасси и соединенный с двигателями ВМГ мультикоптера, генератор соединенный с ДВС и зарядным устройством АКБ и осуществляющий при работе ДВС зарядку АКБ с возможностью осуществлять работу электродвигателей ВМГ воздушных винтов в полете при необходимости. Антенны, установленные на шасси с возможностью обмена данными с компьютером. Воздушные винты ВМГ с электродвигателями установлены на лучах рамы с возможностью поворота вдоль оси лучей рамы на 360 градусов с использованием аэродинамических рулей (заслонок) с возможностью фиксации. Кроме этого лучи рамы мультикоптера выполнены таким образом, что могут использоваться в качестве топливных баков для питания ДВС ВМГ. Установлена система аварийной посадки состоящей подушки безопасности и шасси, выполненного в виде торсионов. Управление полетом принципиально без применения ВМГс ДВС происходит так же, как при радиальном расположении ВМГ с электродвигателями. При увеличении оборотов задних ВМГ и уменьшении на передних мультикоптер движется вперед. При манипулировании левой и правой группами мультикоптер будет двигаться вправо или влево. (фиг..) Поворот мультикоптера производится замедлением вращения, например, винтов, крутящихся по часовой стрелке или наоборот. При включении ВМГ с ДВС и отключении ВМГ с электродвигателями мультикоптер будет осуществлять полет как ЛА вертолетного типа [4,5,6], т.е. обороты несущего винта будут стараться поддерживать постоянными. В этом случае единственной переменной величиной будет оставаться установочный угол лопастей. При его одновременном увеличении для всех лопастей (то есть увеличении общего шага винта) суммарно развиваемая ими подъемная сила будет увеличивается, а при уменьшении - соответственно уменьшается, что будет обеспечивает управление движением по вертикали: когда тяга несущего винта превышает действующую на летательный аппарат силу тяжести, он увлекается вверх, и наоборот. Наклон мультикоптера вперед или назад (по тангажу) и вбок (по крену) будет достигаться созданием разницы подъемных сил, развиваемых лопастями несущего винта при его вращении, в зависимости от того, где находится лопасть в каждый момент времени. Для компенсации реактивного момента, который будет возникать в данном режиме полета в качестве рулевого устройства (винта или фенестрона) можно использовать левую или правую ВМГ с электродвигателями. При выполнении ВМГс ДВС по двухосной схеме реактивный момент будет компенсироваться вращением самих винтов ВМГс ДВС. При комбинированном режиме полета для взлета мультикоптера частота вращения всех винтов увеличивается одинаково, для полета в сторону - вращение винтов ВМГс электродвигателями на одной половине аппарата ускоряется, а на другой - замедляется. Одновременно при помощи автомата перекоса ВМГ с ДВС уменьшает угол установки лопастей несущего винта для передней половины плоскости вращения крыла и увеличивает - для задней. Таким образом, сзади подъемная сила увеличивается, а спереди - уменьшается, благодаря чему изменяется наклон винта и появляется движущая сила. Бортовой компьютер, входящий в состав бортового навигационно-пилотажного комплекса, установленный на шасси производит обмен данными с двигателями мультикоптера и определяет оптимальную частоту их вращения в зависимости от характера движения и направления полета мультикоптера. Воздушные винты ВМГ с электродвигателями установленные на лучах рамы с возможностью поворота вдоль оси лучей рамы на 360 градусов с использованием аэродинамических рулей (заслонок) с возможностью фиксации, позволяют осуществлять полет мультикоптера в режимах винтокрылых летательных аппаратов винтокрылов. При этом два повернутых на 90 градусов ВМГ с электродвигателем в передней части могут работать как тянущие воздушные винты,а два других,как толкающие. Или все четыре ВМГ могут работать одновременно, как тянущие или как толкающие. Это обеспечивает возможность увеличения скорости полета, пространственной ориентации фюзеляжа мультикоптера относительно направления тяги несущих винтов в неограниченном диапазоне независимо от траектории и режима движения, включая режимы взлета, висения, горизонтального и вертикального полета, посадки. Применение в конструкции мультикоптера несущего воздушного винта ВМГ на с ДВС расположенного на фюзеляже мультикоптера обеспечивается ослабление нежелательных переходных процессов, возникающих при переходе ВМГ с электродвигателями из вертикального положения в горизонтальное при этом переход происходит на постоянной высоте, в полете и не требует подъема или опускания мультикоптера. А на больших скоростях полета управляемая обгонная муфта отключает несущие винты от трансмиссии и дальнейший полет идет уже в режиме авторотации, при которой несущие винты работают, фактически, как крыло самолета, осуществляя при этом зарядку АКБ мультикоптера. При аварийной посадке несущие винты ВМГ с ДВС работают в режиме авторотации. При этом при касании земли шасси выполненные в виде торсионов берут на себя часть энергии удара, одновременно аварийная подушка наполняется инертным газом из баллона. Все это позволяет погасить энергию удара мультикоптера о землю.
Техническими результатами изобретения ЛА (мультикоптера) с воздушными винтами комбинированного назначения и гибридной двигательной установкой ВМГ являются:
1. Надежность и использование в конструкции данного ЛА винтов комбинированного назначения совместно с гибридной двигательной установкой;
2. Возможность создавать ЛА (мультикоптера) повышенной грузоподъемности и увеличенной дальности полета без усложнения конструкции;
3. Возможность создавать ЛА (мультикоптеры) различного целевого назначения: пассажирский, грузовой, комбинированный, а также многоцелевой военный ЛА;
4. Безопасность полета ЛА (мультикоптера);
5. Возможность использования ВМГ с ДВС для зарядки аккумуляторов ЛА (мультикоптера) в полете, что делает ЛА незаменимым в районах тундры, степей, пустынь и других открытых, малонаселенных районов;
Сущность изобретения заключается в том что, мультикоптер содержит фюзеляж, на котором установлена ВМГ с двигателем внутреннего сгорания (ДВС) и по меньшей мере четыре ВМГ с электрическими двигателями, причем указанная ВМГ с ДВС имеет воздушный винт с автоматом перекоса, или два воздушных винта выполненных по соосной схеме, указанные по меньшей мере четыре электродвигателя имеют каждый воздушный винт, а винт ДВС и винты электродвигателей расположены в одной плоскости или в параллельных плоскостях, при этом длина воздушного винта ВМГ с ДВС по меньшей мере вдвое больше длины воздушных винтов электродвигателей. Система также содержит компьютер, установленный на шасси с возможностью обмена данными с двигателями мультикоптера, источник электропитания, установленный на шасси и соединенный с двигателями ВМГ мультикоптера, генератор соединенный с ДВС и зарядным устройством АКБ и осуществляющий при работе ДВС зарядку АКБ с возможностью осуществлять работу электродвигателей ВМГ воздушных винтов в полете при необходимости. Антенны, установленные на шасси с возможностью обмена данными с компьютером. Воздушные винты ВМГ с электродвигателями установлены на лучах рамы с возможностью поворота вдоль оси лучей рамы на 360 градусов с использованием аэродинамических рулей (заслонок) с возможностью фиксации. Кроме этого лучи рамы мультикоптера выполнены таким образом, что могут использоваться в качестве топливных баков для питания ДВС ВМГ. Установлена система аварийной посадки состоящей подушки безопасности и шасси, выполненного в виде торсионов.
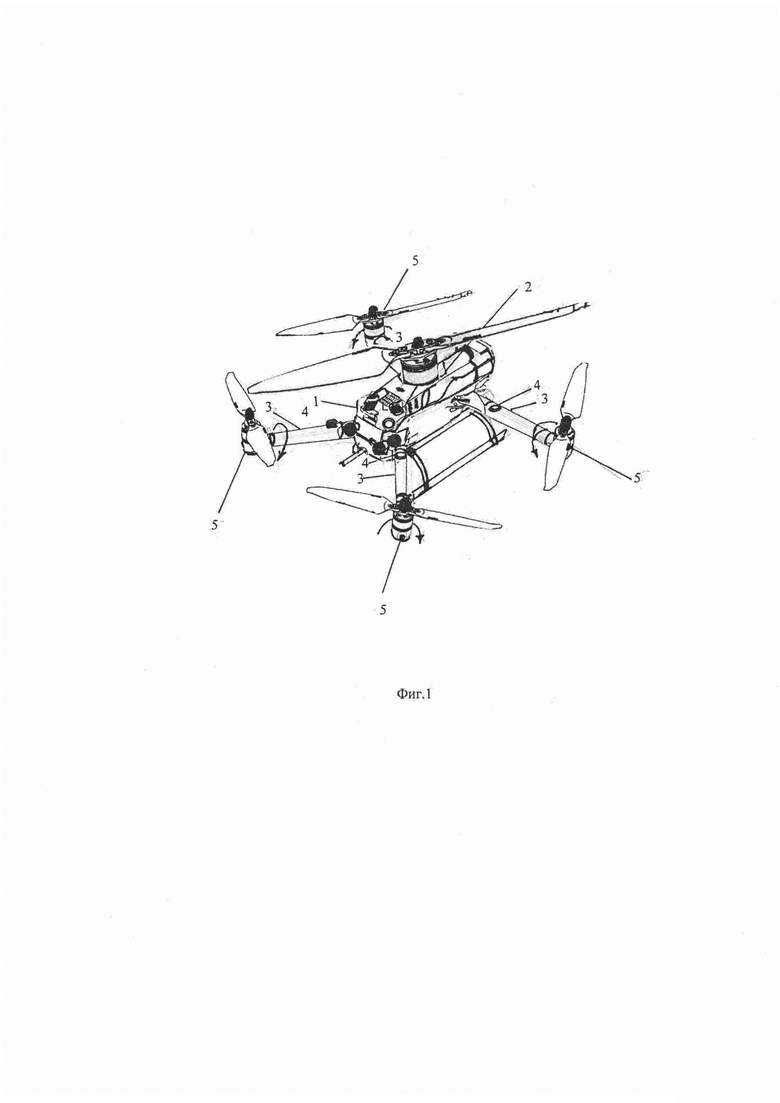
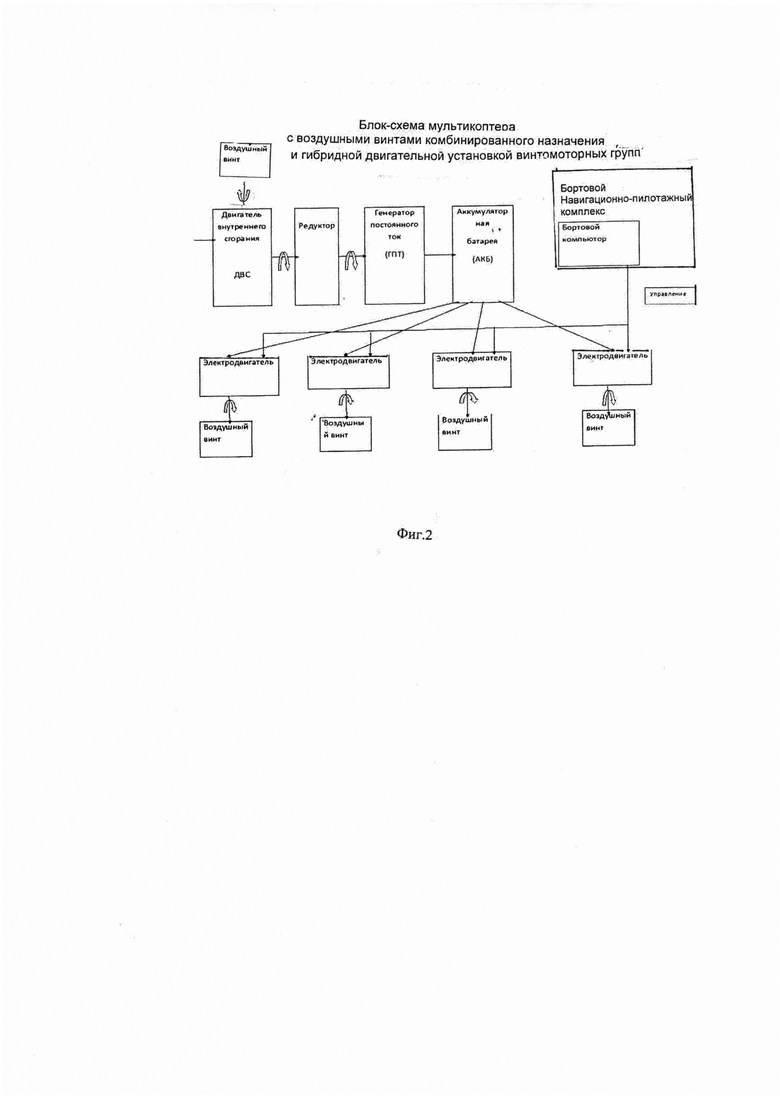
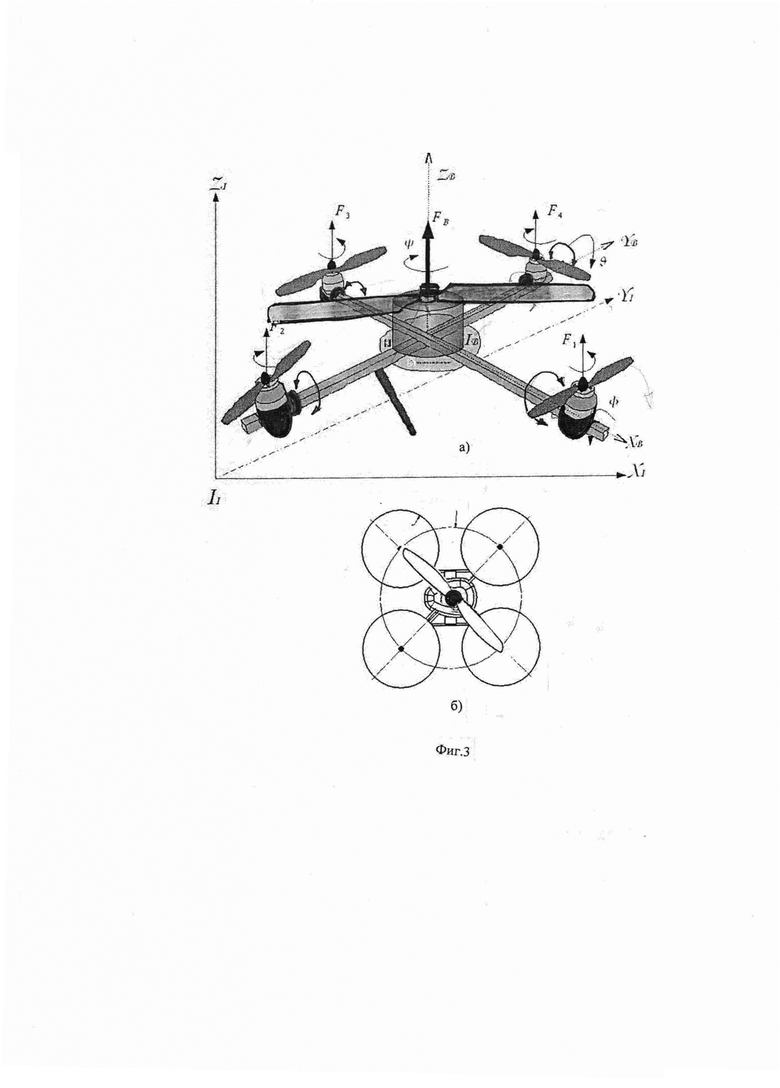
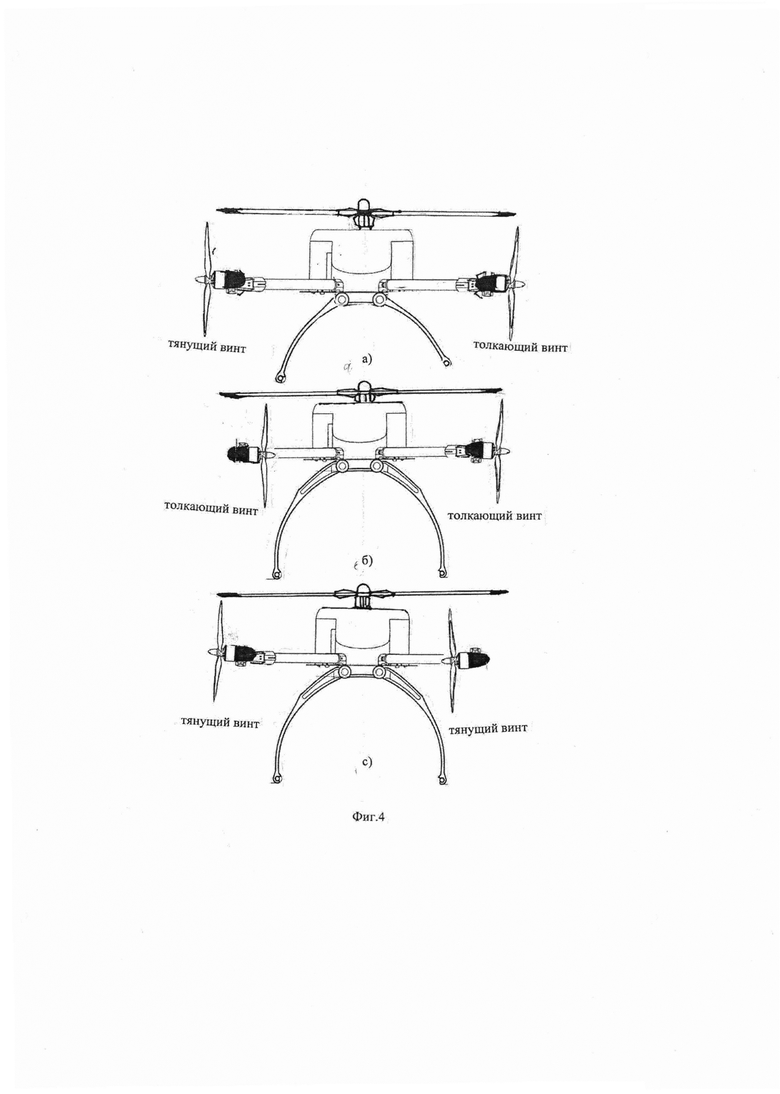
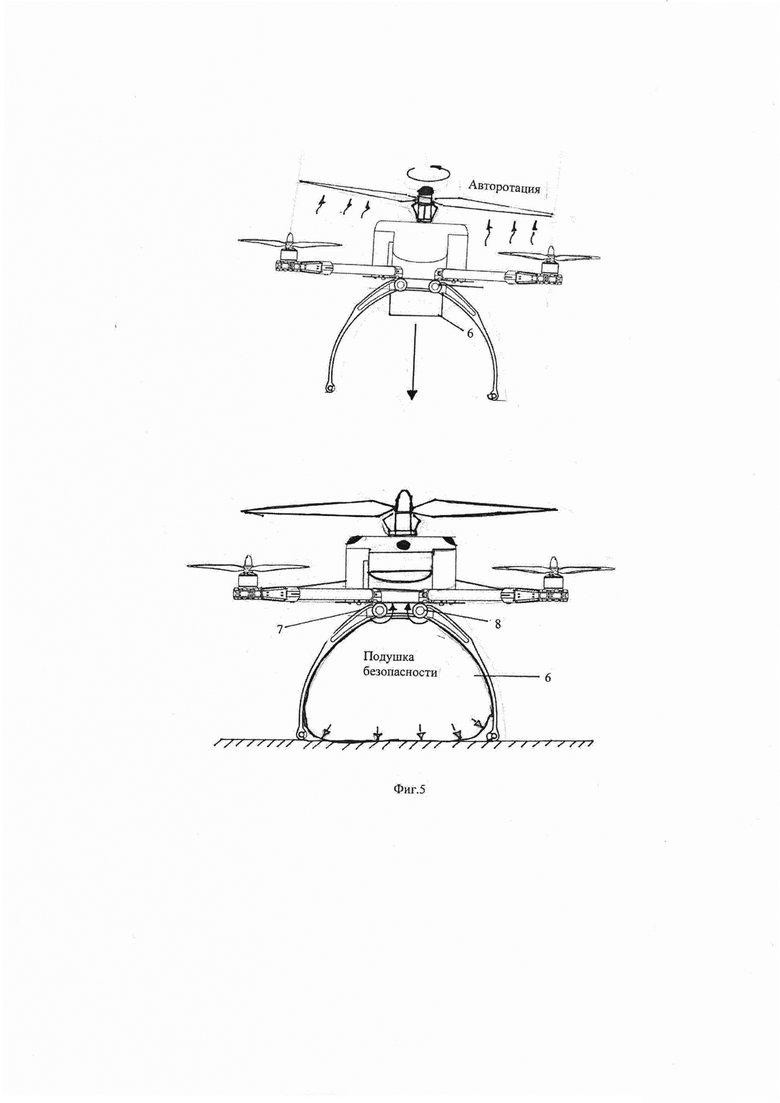
Сущность изобретения поясняется чертежами, где на фиг.1 представлена схема предлагаемого ЛА (мультикоптера) общий вид, на фиг.2 схематично представлена блок схема основных узлов и механизмов ЛА (мультикоптера); на фиг.3а представлена ориентация средств тяги мультикоптера относительно фюзеляжа при взлете, посадке, горизонтальном полете «по вертолетному» и зависании; на фиг.3б вид ЛА (мультикоптера) сверху; на фиг.4 - ориентация средств тяги мультикоптера относительно фюзеляжа при горизонтальном полете «по самолетному» варианты а), в), с); на фиг.5 -представлена схема работы воздушного винта ВМГ ДВС и шасси ЛА с подушкой безопасности (мультикоптера) при аварийной посадке.
Мультикоптер с воздушными винтами комбинированного назначения и гибридной двигательной установкой винтомоторных групп содержит фюзеляж 1, выполненный в аэродинамической форме, где в фюзеляже установлена ВМГ с ДВС и с воздушным винтом 2 создающим подъемную силу, с лучами рамы 3 и размещенными в них топливными баками 4, ВМГ с электродвигателями и воздушными винтами 5 установлены на лучах рамы 3 с возможностью поворота вдоль оси лучей рамы на 360 градусов с возможностью фиксации, система аварийной посадки состоящей из подушки безопасности 6 и шасси7, выполненного в виде торсионов размещенных в трубчатых направляющих 8.
Мультикоптер содержит также, компьютер, входящий в состав бортового навигационно-пилотажного комплекса, генератор, зарядное устройство, баллон с инертным газом, аккумуляторные батареи соответствующие приводы и командные системы управления им (на чертежах не показаны) для осуществления согласованного совместного или раздельного управления ВМГ с ДВС и воздушным винтом 2, ВМГ с электродвигателями и воздушными винтами 5, относительно фюзеляжа 1, являющиеся общеизвестными техническими средствами, применяемыми в существующих конструкциях летательных аппаратов [4,5,6].
Мультикоптер с воздушными винтами комбинированного назначения и гибридной двигательной установкой винтомоторных групп.
Мультикоптер с воздушными винтами комбинированного назначения и гибридной двигательной установкой винтомоторных групп работает следующим образом. Взлет (посадка) осуществляется вертикально «по вертолетному» (ориентация ВМГ относительно фюзеляжа 1 представлена на фиг.1, 3а, 3б) с вытекающими отсюда преимуществами винтокрылых летательных аппаратов. Таким же образом может осуществляться горизонтальный полет и зависание мультикоптера.
Перемещение от места базирования до места назначения может осуществляться «по скоростной схеме -винтокрыла» при ориентации средств тяги относительно фюзеляжа, как представлено на фиг.4, при этом используются преимущества летательных аппаратов скоростной винтокрыльной схемы в скорости и экономичности полета[4,5,6], а размещение дополнительной ВМГ с ДВС и воздушным винтом на фюзеляже оказывает положительное воздействие на его аэродинамические характеристики по грузоподъемности, скорости и безопасности и расстоянии полета. При этом ВМГ с ДВС и воздушным винтом может работать в двух вариантах. Первый, при работе ДВС вращает генератор осуществляя подзарядку АКБ мультикоптера. Второй вариант при отключении ДВС воздушный винт вращаясь от набегающего потока воздуха будет так же осуществлять вращение генератора для подзарядки АКБ, правда с меньшей интенсивностью, это можно так же использовать при аварийном запуске ДВС ВМГ при неисправности стартера. В случае аварийной посадки воздушный винт ВМГ ДВС будет работать в режиме авторотации по «вертолетному». При приземлении шасси мультикоптера выполненные по торсионной схеме погасят часть энергии аварийной посадки, одновременно сработает подушка безопасности расположенная внизу фюзеляжа мультикоптера. фиг.5
При прибытии к месту расположения цели мультикоптер, используя маневренные возможности прототипа [1], осуществляет необходимые манипуляции с пространственным положением фюзеляжа для выполнения необходимых задач. При этом полет и наведение мультикоптера может осуществляться в следующих режимах «мультикоптерном», «вертолетном» или «комбинированном» в зависимости от вида работ ВМГ с воздушными винтами мультикоптера, то есть в неограниченном диапазоне при любом режиме полета или висения мультикоптера.
Источники информации
1. Летательный аппарат. Патент РФ на изобретение №2656932. МПК В64С 27/08, В64С 27/28. 07.06.2018.
2. Ударный мультикоптер. Патент РФ на полезную модель № RU 188791U1. МПК В64С 27/08 (2006.01) B64D 7/08(2006.01)
3. Ткачева, В. Р. Использование гибридной силовой установки в мультикоптерах / В. Р. Ткачева. - Текст: непосредственный // Молодой ученый. - 2015. - №24 (104). - С.146-149. - URL: https://moluch.ru/archive/104/24274/ (дата обращения: 17.12.2021).
4. Самолет вертикального взлета и посадки. Патент США №3037721 А, МПК В64С 29/00. 05.06.1962.
5. Вертолет. Патент РФ на изобретение №2263049. МПК В64С 27/52. 27.10.2005.6.9. Богданов Ю.С., Михеев Р.Л. Конструкция вертолетов. М.: Машиностроение, 1990; URL: http://xaribda.ru/node/68. Дата обращения 27.09.2018.
6. Ружинский Е.И. Американские самолеты вертикального взлета, URL: http://coolib.com/b/128556/read. Дата обращения 27.09.2018.
| название | год | авторы | номер документа |
|---|---|---|---|
| Мультикоптер с полноповоротным рулем направления, гибридной двигательной установкой и комбинированными винтомоторными группами | 2023 |
|
RU2831361C1 |
| Экраноплан с двигательной установкой, выполненной по схеме мультикоптера | 2023 |
|
RU2833275C1 |
| Летательный аппарат короткого взлета и посадки с газодинамическим управлением | 2018 |
|
RU2711633C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ И/ИЛИ С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ С УКОРОЧЕННЫМ ПРОБЕГОМ | 2021 |
|
RU2764311C1 |
| УНИВЕРСАЛЬНЫЙ МНОГОФУНКЦИОНАЛЬНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ КВАДРОКОПТЕРНОГО ТИПА | 2024 |
|
RU2835704C1 |
| ЕДИНЫЙ АЭРОНАЗЕМНЫЙ ДВИЖИТЕЛЬ ЛЕТАТЕЛЬНОГО АППАРАТА | 2019 |
|
RU2735442C1 |
| РАМА МУЛЬТИКОПТЕРА (ВАРИАНТЫ) | 2017 |
|
RU2657650C1 |
| Способ синхронизации и обеспечения симметрии тяги воздушных винтов силовой установки летательного аппарата и электрическая синхронизирующая трансмиссия для его реализации | 2016 |
|
RU2646696C1 |
| СИСТЕМА ДЛЯ УВЕЛИЧЕНИЯ ПРОДОЛЖИТЕЛЬНОСТИ И ДАЛЬНОСТИ ПОЛЕТА МУЛЬТИКОПТЕРА | 2017 |
|
RU2657666C1 |
| Архитектура "Топос" электрического привода воздушного винта | 2019 |
|
RU2786265C2 |
Изобретение относится к области авиации, в частности к конструкциям многовинтовых летательных аппаратов. Мультикоптер с гибридной силовой установкой содержит шасси, на котором установлена ВМГ с двигателем внутреннего сгорания и по меньшей мере четыре ВМГ с электрическими двигателями. ВМГ с ДВС имеет воздушный винт с автоматом перекоса или два воздушных винта, выполненных по соосной схеме. Указанные по меньшей мере четыре электродвигателя имеют каждый воздушный винт, а винт ДВС и винты электродвигателей расположены в одной плоскости или в параллельных плоскостях. Воздушные винты ВМГ с электродвигателями установлены на лучах рамы. Лучи рамы выполнены таким образом, что могут использоваться в качестве топливных баков для питания ДВС ВМГ. Мультикоптер содержит компьютер, входящий в состав бортового навигационно-пилотажного комплекса, источник электропитания – аккумуляторные батареи (АКБ), генератор, соединенный с ДВС и зарядным устройством источника питания – АКБ. Обеспечивается повышение надежности, грузоподъемности и увеличение дальности полета. 2 з.п. ф-лы, 5 ил.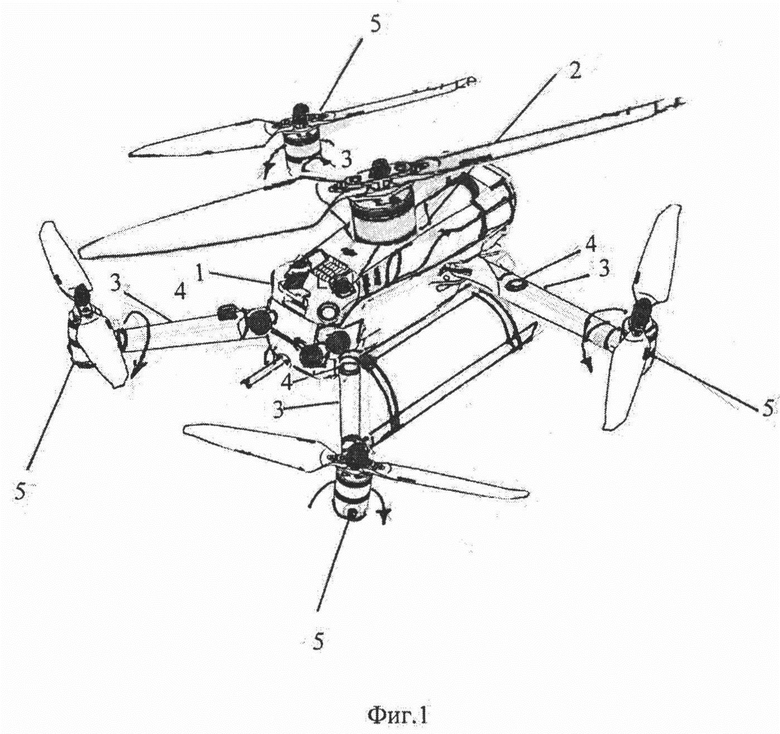
1. Мультикоптер с гибридной силовой установкой, содержащий шасси, на котором установлена ВМГ с двигателем внутреннего сгорания и по меньшей мере четыре ВМГ с электрическими двигателями, отличающийся тем, что указанная ВМГ с ДВС имеет воздушный винт с автоматом перекоса или два воздушных винта, выполненных по соосной схеме, указанные по меньшей мере четыре электродвигателя имеют каждый воздушный винт, а винт ДВС и винты электродвигателей расположены в одной плоскости или в параллельных плоскостях, воздушные винты ВМГ с электродвигателями установлены на лучах рамы, лучи рамы выполнены таким образом, что могут использоваться в качестве топливных баков для питания ДВС ВМГ.
2. Мультикоптер по п. 1, отличающийся тем, что дополнительно содержит компьютер, входящий в состав бортового навигационно-пилотажного комплекса, установленный на шасси с возможностью обмена данными с двигателями мультикоптера, источник электропитания – аккумуляторные батареи (АКБ), установленные на шасси и соединенные с двигателями ВМГ мультикоптера, генератор, соединенный с ДВС и зарядным устройством источника питания – АКБ - и осуществляющий при работе ДВС подзарядку источника питания – АКБ для осуществления работы электродвигателей ВМГ воздушных винтов в полете при необходимости, антенны, установленные на шасси с возможностью обмена данными с компьютером.
3. Мультикоптер по п. 1, отличающийся тем, что дополнительно установлена система аварийной посадки, состоящая из подушки безопасности и шасси, выполненного в виде торсионов.
| CN 105539828 A, 04.05.2016 | |||
| CN 105882954 A, 24.08.2016 | |||
| AU 2020104229 A4, 11.03.2021 | |||
| CN 206900666 U, 19.01.2018 | |||
| СКОРОСТНОЙ ГИБРИДНЫЙ СООСНЫЙ ЭЛЕКТРОВЕРТОЛЕТ | 2021 |
|
RU2753444C1 |
| US 20200283136 A1, 10.09.2020. | |||
