Область техники
Настоящее изобретение относится к медицине и предназначено для моделирования условий принудительной физической активности, тестирования способности к физической нагрузке и тренировки выносливости мелких лабораторных животных (крыс и мышей).
Уровень техники
Из уровня техники известно решение, раскрывающее устройство для моделирования физической нагрузки у мелких лабораторных животных (см. Патент РФ № 2796879, опубл. 29.05.2023) (Д1). Блок А устройства имеет вид рамы, состоящей из подвижной и неподвижной частей, совмещенных винтовым механизмом. В подвижную часть помещен один барабан, а в неподвижную - два. Торцы барабанов подвижной части жестко соединены с ограничителем смещения транспортерной ленты и со шкивом. Под транспортерной лентой помещена дека, жестко соединенная с боковыми стенками неподвижной части, с возможностью скольжения по ней транспортерной ленты. Блок Б представлен корпусом в виде перевернутого прямоугольного ящика, дно которого выполнено из органического стекла с вентиляционными отверстиями. Внутренняя часть блока Б разделена на беговые отсеки перегородками. Достигается ограничение возможности животного покинуть транспортерную ленту до окончания эксперимента, центрирование транспортерной ленты относительно барабанов с корректированием ее натяжения винтовым механизмом за счет расширения или сужения зазора с правой или левой стороны и раздельный учет естественной потери массы каждого животного, связанной с физической нагрузкой из-за потоотделения, путем сбора экскрементов животных вследствие наличия секций.
Известное устройство обеспечивает возможность его использования для экспериментальных исследований на мелких лабораторных животных.
Однако данное решение имеет конструктивное исполнение, которое не позволяет содержать в должной чистоте полотно беговой дорожки, а также не обеспечивается должная эксплуатационная надежность ввиду наличия единой транспортерной ленты, при повреждении которой все устройство не будет работоспособным.
Раскрытие изобретения
Технические результаты, на достижение которых направлено предлагаемое техническое решение, заключаются в:
- обеспечении возможности поддержания большей чистоты индивидуальных беговых дорожек;
- снижении вероятности проскальзывания транспортерных лент беговых дорожек;
- повышении эксплуатационной надежности устройства ввиду наличия индивидуальных транспортерных лент.
Заявленное устройство отличается от предшествующего уровня техники тем, что содержит ряд индивидуальных беговых дорожек, натяжение транспортерных лент которых осуществляется индивидуальными механизмами натяжения. Кроме того, предложенное техническое решение позволяет устанавливать индивидуальные съемные боксы над каждой дорожкой, а электропривод содержит электродвигатель постоянного тока с планетарным редуктором. Другие и более детальные особенности предложенного технического решения будут приведены в описании ниже.
Заявленные технические результаты достигаются устройством для моделирования физической нагрузки у мелких лабораторных животных, содержащее корпус устройства, опорный элемент с механизмом изменения угла наклона корпуса устройства относительно горизонта, съемные индивидуальные боксы, узел электропривода, ведущий и ведомые приводные элементы, транспортерные ленты, электрические шокеры, элементы управления узлом электропривода и электрическими шокерами, причем съемные индивидуальные боксы крепятся к элементам корпуса устройства так, что формируют индивидуальное замкнутое пространство над каждой транспортерной лентой и областью размещения соответствующего шокера, при этом корпус устройства выполнен с возможностью установки в нем узла электропривода, ведущего приводного элемента, ведомых приводных элементов, электрических шокеров, элементов электрической схемы питания и управления узлом электропривода и электрическими шокерами, причем корпус устройства выполнен с возможностью установки в нем индивидуальных механизмов регулировки натяжения лент транспортера, при этом каждая лента транспортера размещается на ведущем и соответствующем ведомом приводных элементах так, что между лентами имеется зазор, причем каждый ведомый приводной элемент является индивидуальным для каждой транспортерной ленты, а узел электропривода выполнен с возможностью передачи крутящего момента на ведущий приводной элемент, который обеспечивает вращение каждой ленты транспортера, причем натяжение каждой ленты транспортера осуществляется независимо за счет индивидуального механизма регулировки натяжения, который обеспечивает смещение и фиксирование соответствующего ведомого приводного элемента в положение, обеспечивающее необходимое натяжение ленты транспортера.
Каждый ведомый приводной элемент представляет собой цилиндрический элемент с подшипниковыми узлами, обеспечивающими вращение цилиндрического элемента вокруг опорного вала, неподвижно закрепленного относительно корпуса устройства, при этом цилиндрический элемент выполнен с буртами по краям для центрирования ленты.
Каждый механизм натяжения состоит из двух продольных пластин с направляющим вырезом, поперечного несущего элемента и двух регулировочных элементов, причем каждая пластина одним из своих концов жестко соединена с опорным валом так, что опорный вал размещается между пластинами, а другой конец пластин жестко соединяется поперечным несущим элементом, формируя тем самым параллельное расположение пластин так, что направляющие вырезы являются соосными и находятся в области между опорным валом и поперечным несущим элементом, при этом поперечный несущий элемент содержит отверстия для подвижного размещения в них регулировочных элементов, которые, в свою очередь, выполнены с возможностью соединения с несущим элементом корпуса устройства так, что имеется возможность смещения в продольном направлении и фиксирование соответствующего ведомого приводного элемента в положение, обеспечивающее необходимое натяжение ленты транспортера, причем ограничение смещения пластин в вертикальном направлении осуществляется за счет ограничивающего механизма, проходящего через все направляющие вырезы пластин и зафиксированного относительно корпуса устройства.
Ограничивающий механизм представляет собой общий стержень или набор стержней.
Количество лент транспортера, которые формируют беговые дорожки, соответствует шести.
Узел электропривода содержит электродвигатель постоянного тока, планетарный редуктор и энкодер, причем электродвигатель постоянного тока обеспечивает передачу крутящего момента на вал планетарного редуктора через соединительный муфтовый узел, а на выходном валу планетарного редуктора установлены ведущий шкив, обеспечивающий передачу крутящего момента на ведущий приводной элемент посредством ременной передачи, при этом выходной вал планетарного редуктора также соединен с энкодером через муфту.
Ведущий приводной элемент представляет собой один общий многоручьевой вал с ведомым шкивом или два соосно соединенных многоручьевых вала, на одном из которых установлен ведомый шкив, причем ведущий приводной элемент содержит выступы, отделяющие ленты друг от друга.
Шокеры представляют собой металлические штыревые или пластинчатые элементы, которые размещены непосредственно перед каждой лентой транспортера так, что образуют решетчатую площадку между лентой и фронтальной частью корпуса устройства, предотвращающей проваливание животного в пространство между лентой и фронтальной частью корпуса устройства.
Элементы управления узлом электропривода и электрическими шокерами включают электрическую схему питания и управления, блок управления беговой дорожкой, выполненный с возможностью формирования сигналов управления скоростью вращения электродвигателя и силой тока, передаваемого на шокеры, индикаторы электропитания, регуляторы скорости электродвигателя, регулятор силы тока, подаваемого на шокеры, кнопку пуска/остановки электродвигателя, кнопку включения устройства в сеть, кнопку перезагрузки микроконтроллера, входящего в состав блока управления беговой дорожкой, при этом электрическая схема питания и управления выполнена с возможностью подключения к ней внешних устройства/устройств, обеспечивающих мониторинг и сбор экспериментальных данных.
Каждый съемный индивидуальный бокс представляет собой прямоугольный короб из оргстекла, нижняя часть которого является открытой, а верхняя часть снабжена дверцей на двух карточных петлях, фиксируемая магнитным элементом с противоположной стороны от петель, причем дверца смонтирована на продольной грани бокса так, что обеспечивается ее открытие на угол от 95 до 100° относительно горизонтальной поверхности.
Под транспортерными лентами размещается поддон.
Соединение продольных пластин и поперечного несущего элемента осуществляется посредством совмещения отверстий на пластинах и цилиндрических выступов несущего элемента, которые размещены на торцевых поверхностях поперечного несущего элемента так, что центральная ось цилиндрических элементов смещена в радиальном направлении от продольной оси поперечного элемента, при этом соединение продольных пластин и поперечного несущего элемента дополнительно фиксируется винтовыми крепежными элементами, которые прижимают пластины к торцевым поверхностям несущего элемента за счет наличия на упомянутых торцевых поверхностях резьбовых отверстий, причем винтовые крепежные элементы стопорятся герметизирующим составом.
Зазор между лентами устанавливается равным не менее ширины выступов, отделяющих ленты друг от друга.
Торцевые поверхности опорного вала имеют цилиндрические выступы, которые совмещаются с соответствующими отверстиями на пластинах для формирования соединения, причем фиксирование пластин обеспечивается винтовыми элементами, которые ввинчиваются в тело опорного вала со стороны торцевых поверхностей, при этом винтовые элементы стопорятся герметизирующим составом.
Краткое описание чертежей
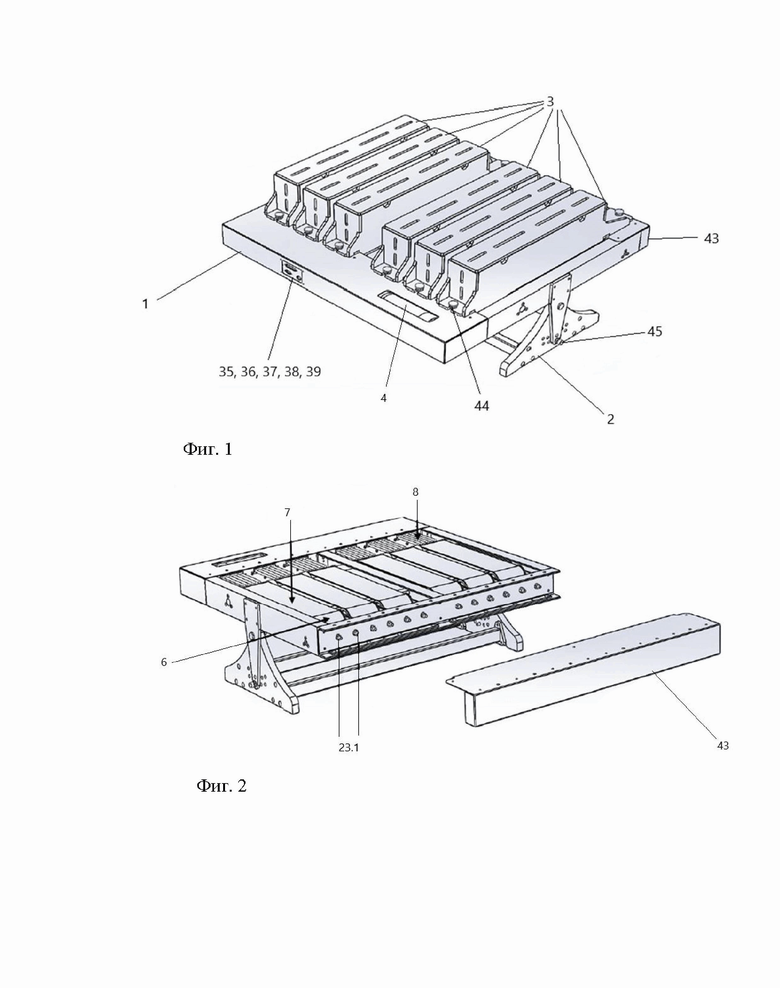
Фиг. 1. Общий вид устройства для моделирования физической нагрузки у мелких лабораторных животных.
Фиг. 2. Расположение регулировочных элементов натяжения транспортерных лент на корпусной части устройства.
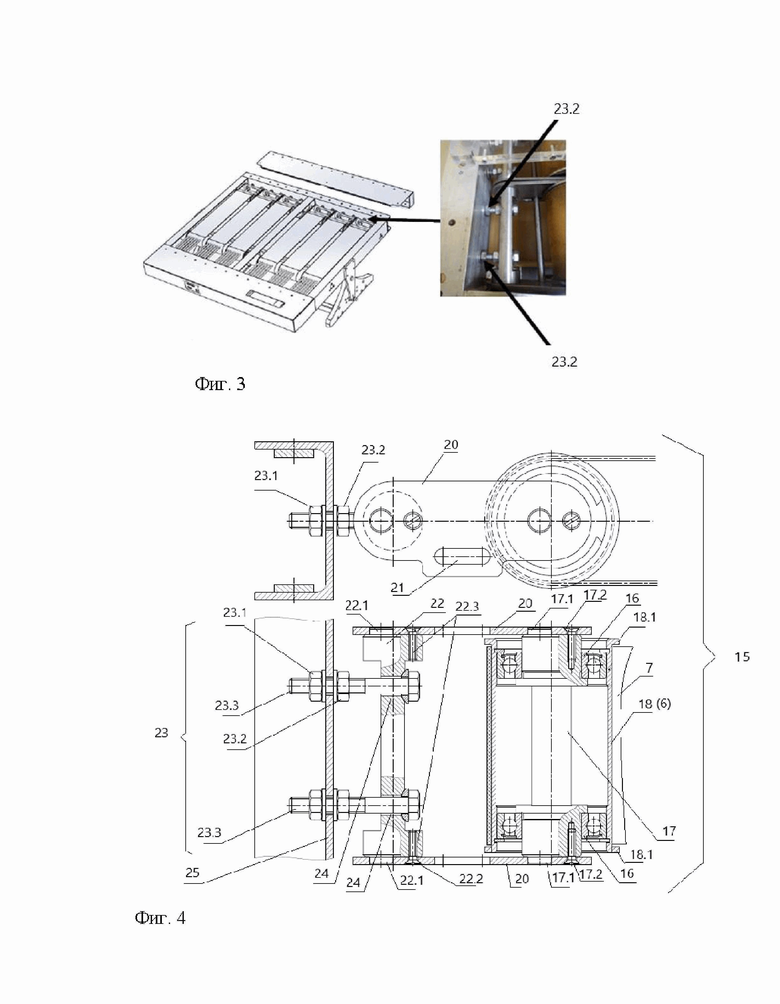
Фиг. 3. Общий вид механизма натяжения лент транспортера.
Фиг. 4. Подробный чертеж механизма натяжения ленты транспортера.
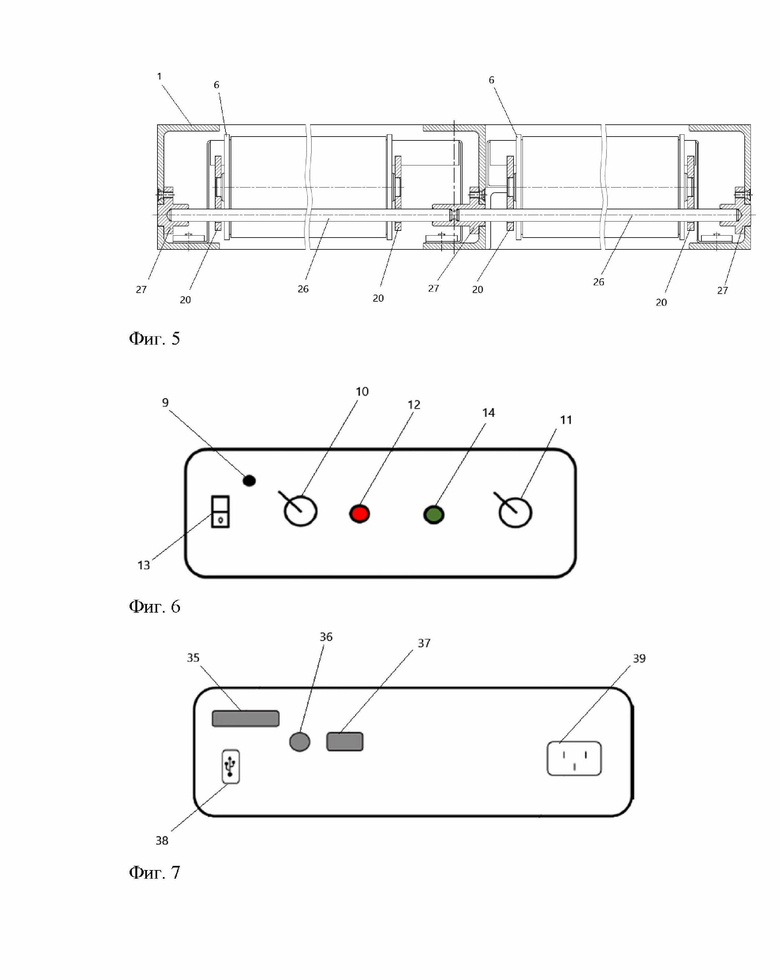
Фиг. 5. Подробный чертеж устройства в разрезе со стороны механизма натяжения.
Фиг. 6. Схематичный пример изображения лицевой панели устройства с элементами управления и индикации.
Фиг. 7. Схематичный пример изображение панели устройства с разъемами для подключения кабелей питания и передачи данных.
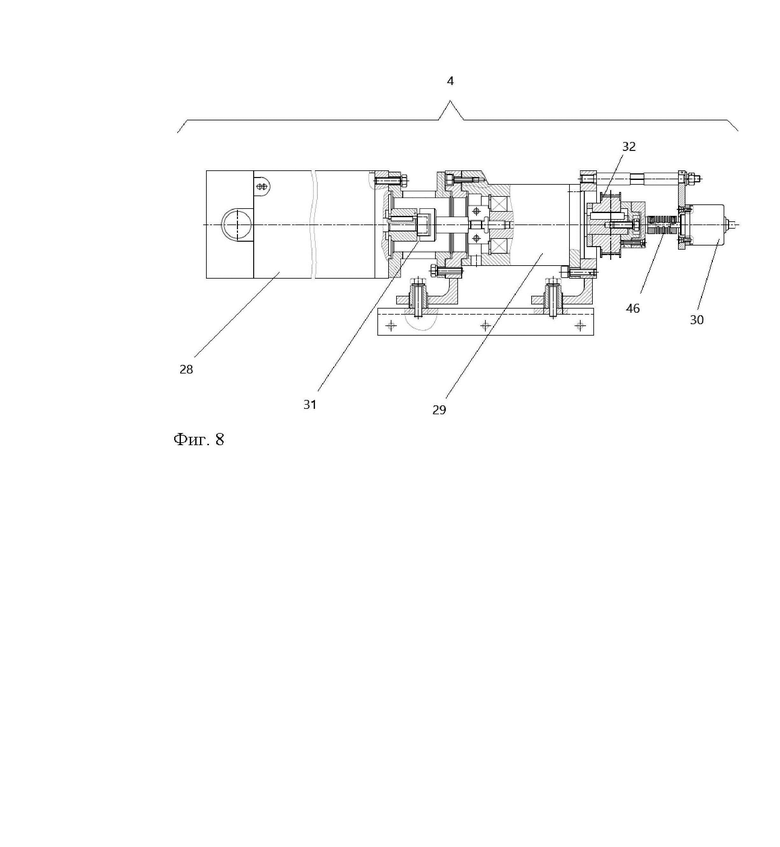
Фиг. 8. Узел электропривода.
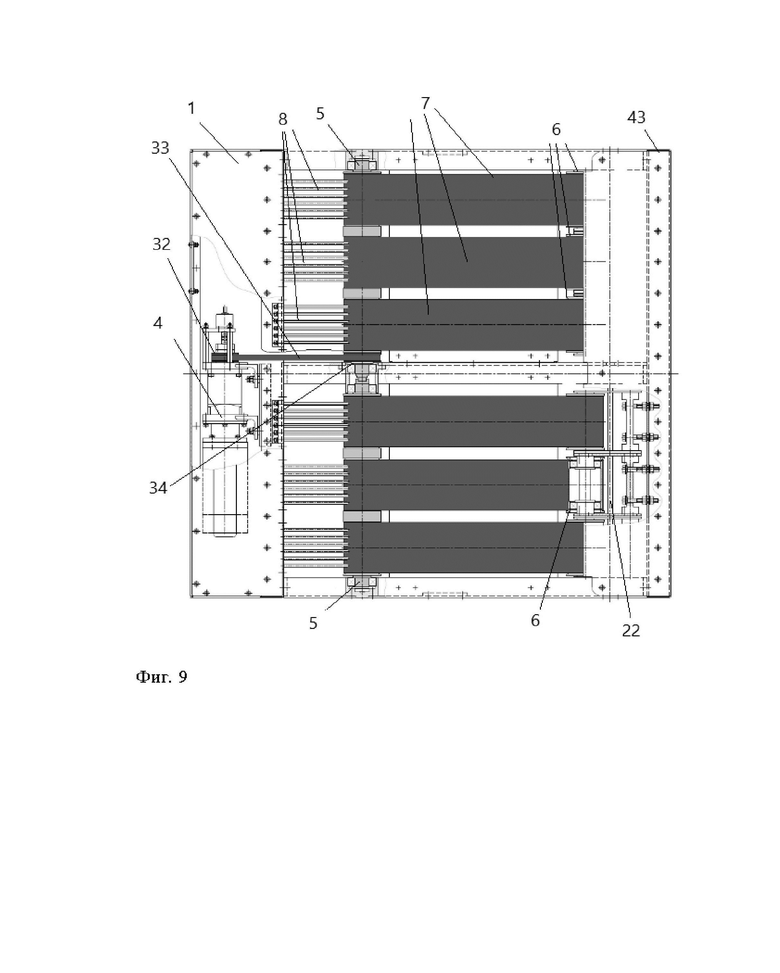
Фиг. 9. Схематичное размещение элементов привода и механизмов натяжения.
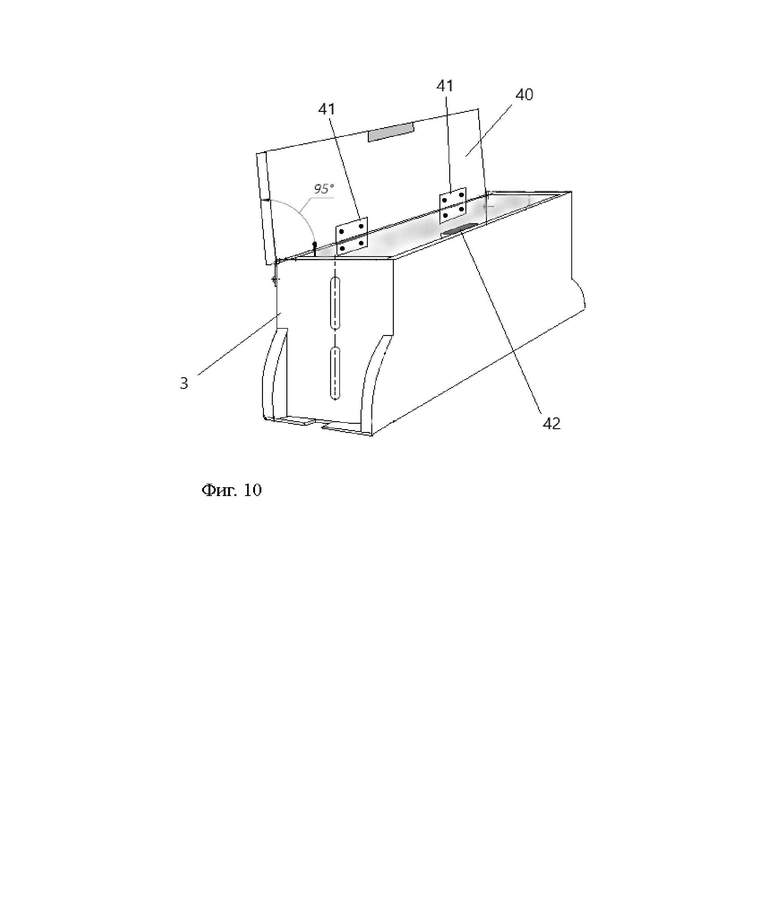
Фиг. 10. Схематичное изображение съемного индивидуального бокса (бокса-навершии).
Осуществление изобретения
Сущность предложенного технического решения проиллюстрирована на фигурах 1-10, где приведены основные конструктивные элементы устройства, обозначенные следующими позициями:
1 - корпус устройства;
2 - опорный элемент с механизмом изменения угла наклона корпуса устройства относительно горизонта;
3 - съемные индивидуальные боксы (боксы-навершии);
4 - узел электропривода;
5 - ведущий приводной элемент;
6 - ведомый приводной элемент, включающий цилиндрический элемент (натяжной ролик);
7 - транспортерная лента;
8 - электрический шокер;
9 - индикатор электропитания;
10 - регулятор скорости электродвигателя;
11 - регулятор силы тока, подаваемого на шокеры;
12 - кнопка пуска/остановки электродвигателя;
13 - кнопка включения устройства в сеть;
14 - кнопка перезагрузки микроконтроллера;
15 - индивидуальный механизм регулировки натяжения лент транспортера;
16 - подшипниковые узлы, обеспечивающие вращение цилиндрического элемента вокруг опорного вала;
17 - опорный вал;
17.1 - цилиндрические выступы опорного вала;
17.2 - винтовые элементы опорного вала;
18 - цилиндрический элемент (натяжной ролик);
18.1 - бурты цилиндрического элемента;
20 - продольная пластина с направляющим вырезом;
21 - направляющий вырез пластины;
22 - поперечный несущий элемент;
22.1 - цилиндрический выступ поперечного несущего элемента;
22.2 - винтовой крепежный элемент поперечного несущего элемента;
22.3 - резьбовые отверстия;
23 - регулировочные элементы;
23.1 - гайки регулировки положения натяжных роликов;
23.2 - контргайки натяжных роликов;
23.3 - болт регулировочного элемента;
24 - отверстия для подвижного размещения регулировочных элементов;
25 - несущий элемент корпуса устройства в виде уголка;
26 - ограничивающий механизм для предотвращения смещения пластин в вертикальном направлении;
27 - фиксаторы ограничивающего механизма;
28 - электродвигатель постоянного тока;
29 - планетарный редуктор;
30 - энкодер;
31 - соединительный муфтовый узел;
32 - ведущий шкив;
33 - ремень электропривода;
34 - ведомый шкив;
35 - разъем для подключения питания шокеров;
36 - разъем для подключения питания электродвигателя;
37 - разъем для подключения кабеля передачи данных;
38 - разъем для подключения USB-кабеля;
39 - разъем для подключения кабеля питания;
40 - дверца бокса;
41 - карточные петли дверцы бокса;
42 - магнитный элемент;
43 - задний кожух механизмов натяжения;
44 - фиксаторы съемных индивидуальных боксов;
45 - стопор механизма изменения угла наклона;
46 - муфта энкодера.
Общий вид устройства для моделирования физической нагрузки у мелких лабораторных животных приведен на фиг.1. Устройство для моделирования физической нагрузки у мелких лабораторных животных по существу представляет собой беговую дорожку для лабораторных мышей и крыс. Беговая дорожка содержит корпус устройства (1), опорный элемент (2) с механизмом изменения угла наклона корпуса устройства относительно горизонта, съемные индивидуальные боксы (3), узел электропривода (4), ведущий (5) и ведомые (6) приводные элементы, транспортерные ленты (7), электрические шокеры (8).
Корпус устройства (1), как правило, выполняется из металла и содержит полости, посадочные места и зоны крепления для фиксирования элементов узла электропривода (4), элементов управления узлом электроприводом и электрическими шокерами, причем элементы управления включают, в частности: индикатор электропитания (9), регулятор скорости электродвигателя (10), регулятор силы тока (11), кнопку пуска/остановки электродвигателя (12), кнопку включения устройства в сеть (13), кнопку перезагрузки микроконтроллера (14), входящего в состав блока управления.
Беговая дорожка состоит из блока беговых дорожек (в зависимости от комплектации беговых полотен (лент транспортера) может быть от одного до шести), блока управления скорости дорожки и силы стимула совмещенным с блоком питания. Регистрация режимов работы результатов эксперимента осуществляется с помощью входящего в комплект программного обеспечения. Для обеспечения работы с животными различных размеров, беговая дорожка может комплектоваться индивидуальными съемными боксами (3) – боксами-навершиями различных габаритов. Беговая дорожка имеет регулируемое основание в виде опорного элемента (2), позволяющее менять угол наклона бегового полотна относительно горизонтальной поверхности. Данная функция обеспечивает регулирование необходимой нагрузки на подопытное животное. Фиксирование наклона беговых дорожек относительно горизонтальной поверхности осуществляется при помощи стопоров (45) механизма изменения угла наклона. Стопоры (45) устанавливаются в соответствующие отверстия, которые позиционируются на поверхности опорной части механизма изменения угла наклона так, что имеется возможность выбора соответствующего положения и фиксацию положения корпуса устройства.
На фиг.8 приведен узел привода (4), который содержит электродвигатель (28), планетарный редуктор (29), соединительный муфтовый узел (31) (в частном варианте выполнен в виде двух полумуфт), муфта энкодера (46), энкодер (30), блок питания и блок управления беговой дорожкой (не показаны на фигурах). В качестве электродвигателя применяется коллекторный электродвигатель постоянного тока ДП 230-24, который соединен муфтой (31), компенсирующей погрешности изготовления, с планетарным редуктором РП060Ф-005-6,35-38,1 и позволяет значительно снизить габаритные размеры привода при относительно высокой мощности. Электродвигатель, планетарный редуктор и соединительные муфты установлены в корпусе беговой дорожки. На выходном валу планетарного редуктора (29) установлены ведущий шкив (32), служащий для передачи вращения на ведущий приводной элемент (5), в качестве которого может применяться один многоручьевой вал (приводной вал) или два многоручьевых вала (приводные валы), которые соосно соединяются для совместного вращения. Передача крутящего момента осуществляется посредством ременной передачи за счет ремня электропривода (33). Ремень электропривода (33) устанавливается на ведущий шкив (32) и ведомый шкив (34), который, в свою очередь, устанавливается на многоручьевом валу или при использовании схемы с двумя валами на одном из них. При этом многоручьевой вал или многоручьевые валы имеют соответствующие цилиндрические выступы, которые отделяют дорожки (ленты транспортера) друг от друга, формируя отдельные секции. Соответственно, расстояние между лентами транспортера будет равным не менее ширины выступов, максимальное расстояние формируется исходя из габаритов устройства и конструктивных особенностей привода. В частном случае реализации может быть применена схема, при которой имеется шесть дорожек, разделенных на две группы как показано на фиг. 9, где расстояние между крайними лентами соответствует ширине конструктивного узла, обеспечивающего привод лент. Данный узел включает ведомый шкив (34), опорный элемент многоручьевого вала/валов и т.д.
Узел электропривода также включает энкодер (30) E30S4-1000-3-V-5, считывающий обороты с вала планетарного редуктора (29). Скорость на приводном валу (или приводных валах) можно менять непосредственно во время эксперимента вращая соответствующую ручку пульта (регулятор скорости электродвигателя (10)). Выходной вал планетарного редуктора (29) соединен с энкодером через соответствующую муфту энкодера.
На корпусе устройства так же смонтированы разъемы для подключения питания шокеров (35), питания электродвигателя (36) (электродвигатель подключается к сети питания отдельным кабелем), подключения кабеля передачи данных (37), USB-кабеля (38), кабеля питания (39), через который обеспечивается подключение к сети питания блока управления беговой дорожкой (в частном случае напряжение питания ~220 В, в питающей сети устанавливается предохранитель).
Как ранее было отмечено, над каждой беговой дорожкой зафиксированы с помощью фиксаторов (44) съемные боксы-наверши (3), габаритные размеры которых выбираются исходя из габаритов животного и особенностей установки. В предложенном техническом решении каждый съемный бокс (3) формирует замкнутое пространство, в область которого попадают соответствующие транспортерная лента и шокер. Изготавливается бокс из оргстекла. В верхней части бокса (3) находится дверца (40) на двух карточных петлях (41), фиксируемая магнитным элементом (42), который в частном варианте может быть выполнен в виде магнита или нескольких магнитов (например, два магнита и более). Магнитный элемент (42) установлен с противоположной стороны от петель. Все элементы корпуса собраны на саморезах и пазовой конструкции деталей. Дверца (40) смонтирована на продольной стенке (грани) бокса так, что обеспечивается ее открытие на угол от 95 до 100°. Это позволяет обеспечить беспрепятственную процедуру помещения и извлечения животного из бокса. Кроме того, такой угол позволяет автоматически обеспечить фиксирование дверцы (40) в открытом положении (см. фиг. 1, 10).
Также стоит более подробно пояснить устройство и работу механизмов натяжения транспортерных лент (7) (см. фиг. 3, 4, 5 и 9). Механизм регулировки натяжения обеспечивает смещение и фиксирование соответствующего ведомого приводного элемента (6) в положение, обеспечивающее необходимое натяжение ленты транспортера (7). Приводные элементы (6) включают цилиндрический элемент (18), подшипниковые узлы (16) и опорный вал (17). Каждый индивидуальный механизм регулировки натяжения (15) состоит из двух продольных пластин (20) с направляющим вырезом, поперечного несущего элемента (22) и двух регулировочных элементов (23). Каждая пластина (20) одним из своих концов жестко соединена с опорным валом (17) так, что опорный вал (17) размещается между пластинами (20), а другой конец пластин (20) жестко соединяется поперечным несущим элементом (22). Таким образом, формируется параллельное расположение пластин (20) так, что направляющие вырезы являются соосными и находятся в области между опорным валом (17) и поперечным несущим элементом (22). Поперечный несущий элемент (22) может быть выполнен в виде балки, имеющей на концах соответствующие утолщения для формирования соединительных поверхностей. Например, несущий элемент (22) может выполняться в виде фигурной балки, имеющей сложную геометрическую форму (выступы, ребра жесткости и т.д.), которая позволяет обеспечивать крепление к ее торцевым поверхностям упомянутых пластин (20), а также воспринимать усилие, создаваемое регулировочными болтами (23.3). Несущий элемент (22) содержит отверстия (24) для подвижного размещения в них регулировочных элементов (23, 23.3). Вместе с тем болты (23.3) (или шпильки или иные крепежные элементы) могут иметь контргайки для их фиксирования непосредственно на несущем элементе (22) как это проиллюстрировано на фиг.3. Количество отверстий (24) соответствует двум и выполняются они на одинаковом расстоянии от торцевых поверхностей несущего элемента (22) так, чтобы обеспечить равномерное позиционирование поперечного несущего элемента (22) (а соответственно и пластин (20)) относительно несущего элемента (25) корпуса устройства, который преимущественно выполняется в виде уголка или профиля, обеспечивающего формирование опорной поверхности. Под равномерным позиционированием поперечного несущего элемента (22) понимается параллельное позиционирование продольной поверхности несущего элемента (25) и продольной оси поперечного несущего элемента (22). Регулировочные элементы (23) могут включать комплект гаек (23.1 и 23.2) и болты (23.3). Так, болты (23.3) (или могут быть использованы шпильки, стержни с резьбой и т.д.) устанавливаются непосредственно в отверстия (24) несущего элемента (22). Далее на резьбовую часть болта (23.3) навинчивается контргайка (23.2), свободная концевая часть болта (23.3) устанавливается в соответствующее отверстие несущего элемента (25) и с внешней стороны несущего элемента (25) на болт (23.3) навинчивается гайка (23.1) регулировки положения натяжных роликов.
Соединение продольных пластин (20) и поперечного несущего элемента (22) осуществляется посредством совмещения отверстий на пластинах и цилиндрических выступов (22.1) несущего элемента, которые размещены на торцевых поверхностях поперечного несущего элемента так, что центральная ось цилиндрических элементов смещена в радиальном направлении от продольной оси поперечного элемента. При этом соединение продольных пластин и поперечного несущего элемента дополнительно фиксируется винтовыми крепежными элементами (22.2), которые прижимают пластины к торцевым поверхностям несущего элемента за счет наличия на упомянутых торцевых поверхностях резьбовых отверстий (22.3), причем винтовые крепежные элементы стопорятся герметизирующим составом.
Опорный вал (17) является неподвижным и содержит на своих краевых участках соответствующие поверхности для установки подшипниковых узлов (16), обеспечивающих вращение цилиндрического элемента (18) вокруг опорного вала (17). Цилиндрический элемент (18) для предотвращения его продольного смещения фиксируется соответствующими стопорными кольцами. При этом каждый цилиндрический элемент (18) выполнен с буртами (18.1) по краям для центрирования ленты.
Торцевые поверхности опорного вала (17) имеют цилиндрические выступы (17.1), которые совмещаются с соответствующими отверстиями на пластинах для формирования соединения. Фиксирование пластин обеспечивается винтовыми элементами (17.2), которые дополнительно стопорятся герметизирующим составом. Винтовые элементы ввинчиваются в тело опорного вала (17) со стороны торцевых поверхностей.
Для формирования соответствующей опоры индивидуального механизма регулировки натяжения (15) лент транспортера в пластинах (20) формируют направляющие вырезы (21), в которые устанавливается ограничивающий механизм (26) для предотвращения смещения пластин в вертикальном направлении. Ограничивающий механизм (26) проходит сквозь все пластины (20) и устанавливается неподвижно относительно корпуса устройства (1) в соответствующих фиксаторах (27) ограничивающего механизма. Ограничивающий механизм (26) может быть выполнен в виде общего стержня или набора стержней, которые соосно размещаются в соответствующих фиксаторах (27).
Таким образом, одновременно образуется опорная точка для пластин (20) и узел для предотвращения смещения в вертикальном направлении всего индивидуального механизма регулировки натяжения лент транспортера (15). При этом за счет наличия в пластинах направляющих вырезов (21), выполненных в продольном направлении, обеспечивается возможность смещения всего механизма регулировки натяжения лент транспортера (15) в направлении несущего элемента (22), что позволяет регулировать натяжение каждой транспортерной ленты (7) в заданных пределах.
В предложенной конструкции беговой дорожки между лентами имеется расстояние, достаточное для исключения скапливания загрязнений в процессе эксперимента. Все загрязнения, падая в щелевые промежутки между лентами, попадают в поддон.
Работа устройства осуществляется следующим образом.
На ленту транспортера, разграниченную отсеками, помещают лабораторное животное, которое вынуждено продвигаться со скорость движения ленты транспортера. В случае отказа от движения по ленте на животное оказывается на решетке «шокера», который создает электрический стимул, побуждающий к дальнейшему движению. Силу стимула и скорость вращения транспортерной ленты непосредственно во время эксперимента можно менять, вращая соответствующую ручку пульта. При этом устройство выполнено с возможностью подключения к нему средств мониторинга, которые могут быть выполнены на базе компьютера, имеющего соответствующее программное обеспечение. Данное программное обеспечение можно установить на любой компьютер. Программное обеспечение позволяет регистрировать следующие параметры: текущая скорость дорожки (см/с), сила стимула (мА), время нахождения животного на дорожке (с), время нахождения животного на площадке (с), количество полученных животным стимулов, пройденное расстояние (м), общее время эксперимента (с).
Программа является одной из составных частей устройства и предназначена для: управления регистрацией и настройкой параметров сбора экспериментальных данных; табличной и графической визуализации экспериментальных данных; статистической обработки и документирования экспериментальных данных.
В процессе подготовки устройства к работе может возникнуть необходимость регулировки натяжения лент транспортера. Частота необходимости данной процедуры зависит от условий эксплуатации, перепадов температуры в помещении, частоты использования и т.д. Данный процесс осуществляется следующим образом.
Для регулировки натяжения транспортерных лент (полотен) необходимо отсоединить кабель, подающий напряжение на шокеры (8), снять боксы-навершии (3), снять задний кожух (43) с задней части устройства отвинтив крепёжные винты. Далее осуществляют ослабление контргайки (23.2) и ослабляют гайки (23.1) регулировки положения натяжных роликов, затем выдвигают натяжной ролик (элемент - (18)/(6)) вперед до провисания полотна (для всех полотен, требующих регулировки). Далее запускают электродвигатель на минимальной скорости и выставляют ролик в нужное положение, удерживая его за место соединения с рамой, при котором полотно не проскальзывает и не съезжает с натяжного ролика. Затем фиксируют гайками (23.1) ролик в нужном положении. Для корректной работы натяжение полота должно быть минимально необходимое, чтобы избегать проскальзывания ленты. Избыточное натяжение полотна затруднит правильное позиционирование и может привести к соскальзыванию полотна. Для тонкой настройки регулируйте положение натяжного ролика с помощью гаек (23.1), поворачивая их с помощью ключа не более чем на четверть оборота за один раз. Проделывают данную процедуру со всеми дорожками, требующими регулировки.
Таким образом, предложенное устройство, представляющее собой беговую дорожку для мелких подопытных животных, содержит в своей конструкции раздельную систему регулирования натяжения транспортерных лент (полотен), что дает:
1. Возможность регулирования натяжения ленты на каждой из беговых дорожек индивидуально, что, в свою очередь, исключает проскальзывание ленты на валу.
2. Наличие просветов между дорожками позволяет содержать дорожки в большей чистоте, т.к. фекальные массы с полотна через просветы попадают в поддоны под транспортерной лентой, не загрязняя полотно дорожки.
3. При разрыве или порезе какой-либо из дорожек остальные остаются рабочими, что, в конечном счете увеличивает срок эксплуатации полотна.
Соответственно, все признаки, характеризующие устройство, а также признаки, дополняющие устройство частными вариантами реализации, находятся в причинно-следственной связи с заявленными техническими результатами, которые направлены на обеспечение возможности поддержания большей чистоты индивидуальных беговых дорожек, снижение вероятности проскальзывания транспортерных лент беговых дорожек, повышение эксплуатационной надежности устройства ввиду наличия индивидуальных транспортерных лент.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ШЕЛУШЕНИЯ КЕДРОВЫХ ШИШЕК С ИХ ПРЕДВАРИТЕЛЬНОЙ ТЕРМИЧЕСКОЙ ОБРАБОТКОЙ | 2011 |
|
RU2491010C2 |
| Торговый автомат | 2021 |
|
RU2767160C1 |
| УСТАНОВКА ДЛЯ ФИЛЬТРОВАНИЯ ЖИДКОСТИ | 2007 |
|
RU2355461C2 |
| ПОДБОРЩИК ВАЛКОВ ЗЕРНОВЫХ КУЛЬТУР | 2005 |
|
RU2298312C1 |
| ЭЛЕКТРОПРИВОД | 2000 |
|
RU2173420C1 |
| РЕВЕРСИВНЫЙ ПРИВОД ТРАНСПОРТЕРА | 1990 |
|
RU2085067C1 |
| ТРЕНАЖЕР С "БЕГУЩЕЙ" ДОРОЖКОЙ ДЛЯ КОСМИЧЕСКОГО АППАРАТА | 2013 |
|
RU2524912C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ФИЗИЧЕСКОЙ НАГРУЗКИ У ЭКСПЕРИМЕНТАЛЬНЫХ ЖИВОТНЫХ | 2022 |
|
RU2796879C1 |
| ПЛАНЕТАРНЫЙ ФРИКЦИОННО-ШАРИКОВЫЙ РЕДУКТОР | 1991 |
|
RU2010141C1 |
| КОНВЕЙЕРНЫЙ СТАБИЛИЗАТОР КОРОТКИХ МАКАРОННЫХ ИЗДЕЛИЙ | 2007 |
|
RU2341083C2 |
Изобретение относится к медицинской технике. Устройство для моделирования физической нагрузки у мелких лабораторных животных содержит корпус, опорный элемент с механизмом изменения угла наклона корпуса относительно горизонтальной поверхности, съемные индивидуальные боксы, узел электропривода, ведущий и ведомые приводные элементы, транспортерные ленты. Съемные индивидуальные боксы прикреплены к корпусу так, что формируют индивидуальное замкнутое пространство над каждой транспортерной лентой. В корпусе установлены индивидуальные механизмы регулировки натяжения лент транспортера. Каждая лента размещена на ведущем и соответствующем ведомом приводных элементах так, что между лентами имеется зазор. Каждый ведомый приводной элемент является индивидуальным для каждой транспортерной ленты. Узел электропривода передает крутящий момент на ведущий приводной элемент, который вращает ленты с натяжением каждой ленты независимо. Индивидуальный механизм регулировки натяжения смещает и фиксирует соответствующий ведомый приводной элемент в положение, обеспечивающее необходимое натяжение ленты транспортера. Достигается повышение эксплуатационной надежности устройства, снижение вероятности проскальзывания транспортерных лент беговых дорожек, а также поддержание большей чистоты индивидуальных беговых дорожек. 13 з.п. ф-лы, 10 ил.
1. Устройство для моделирования физической нагрузки у мелких лабораторных животных, содержащее корпус устройства, опорный элемент с механизмом изменения угла наклона корпуса устройства относительно горизонтальной поверхности, съемные индивидуальные боксы, узел электропривода, ведущий и ведомые приводные элементы, транспортерные ленты, электрические шокеры, элементы управления узлом электропривода и электрическими шокерами, причем съемные индивидуальные боксы прикреплены к элементам корпуса устройства так, что формируют индивидуальное замкнутое пространство над каждой транспортерной лентой и областью размещения соответствующего шокера, при этом корпус устройства выполнен с возможностью установки в нем узла электропривода, ведущего приводного элемента, ведомых приводных элементов, электрических шокеров, элементов электрической схемы питания и управления узлом электропривода и электрическими шокерами, отличающееся тем, что корпус устройства выполнен с возможностью установки в нем индивидуальных механизмов регулировки натяжения лент транспортера, при этом каждая лента транспортера размещена на ведущем и соответствующем ведомом приводных элементах так, что между лентами имеется зазор, причем каждый ведомый приводной элемент является индивидуальным для каждой транспортерной ленты, а узел электропривода выполнен с возможностью передачи крутящего момента на ведущий приводной элемент, который выполнен с возможностью вращения каждой ленты транспортера с натяжением каждой ленты независимо за счет индивидуального механизма регулировки натяжения, который выполнен с возможностью смещения и фиксирования соответствующего ведомого приводного элемента в положение, обеспечивающее необходимое натяжение ленты транспортера.
2. Устройство по п. 1, отличающееся тем, что каждый ведомый приводной элемент представляет собой цилиндрический элемент с подшипниковыми узлами, выполненными с возможностью вращения цилиндрического элемента вокруг опорного вала, неподвижно закрепленного относительно корпуса устройства, при этом цилиндрический элемент выполнен с буртами по краям для центрирования ленты.
3. Устройство по п. 2, отличающееся тем, что каждый механизм натяжения состоит из двух продольных пластин с направляющим вырезом, поперечного несущего элемента и двух регулировочных элементов, причем каждая пластина одним из своих концов жестко соединена с опорным валом так, что опорный вал размещен между пластинами, а другой конец пластин жестко соединен поперечным несущим элементом, формируя тем самым параллельное расположение пластин так, что направляющие вырезы являются соосными и находятся в области между опорным валом и поперечным несущим элементом, при этом поперечный несущий элемент содержит отверстия для подвижного размещения в них регулировочных элементов, которые выполнены с возможностью соединения с несущим элементом корпуса устройства и с возможностью смещения в продольном направлении и фиксирования соответствующего ведомого приводного элемента в положение, обеспечивающее необходимое натяжение ленты транспортера, причем ограничение смещения пластин в вертикальном направлении обеспечено за счет ограничивающего механизма, проходящего через все направляющие вырезы пластин и зафиксированного относительно корпуса устройства.
4. Устройство по п. 3, отличающееся тем, что ограничивающий механизм представляет собой общий стержень или набор стержней.
5. Устройство по п. 1, отличающееся тем, что количество лент транспортера, которые формируют беговые дорожки, составляет шесть.
6. Устройство по п. 1, отличающееся тем, что узел электропривода содержит электродвигатель постоянного тока, планетарный редуктор и энкодер, причем электродвигатель постоянного тока выполнен с возможностью передачи крутящего момента на вал планетарного редуктора через соединительный муфтовый узел, а на выходном валу планетарного редуктора установлены ведущий шкив, выполненный с возможностью передачи крутящего момента на ведущий приводной элемент посредством ременной передачи, при этом выходной вал планетарного редуктора также соединен с энкодером через муфту.
7. Устройство по п. 1, отличающееся тем, что ведущий приводной элемент представляет собой один общий многоручьевой вал с ведомым шкивом или два соосно соединенных многоручьевых вала, на одном из которых установлен ведомый шкив, причем ведущий приводной элемент содержит выступы, отделяющие ленты друг от друга.
8. Устройство по п. 1, отличающееся тем, что шокеры представляют собой металлические штыревые или пластинчатые элементы, которые размещены непосредственно перед каждой лентой транспортера так, что образуют решетчатую площадку между лентой и фронтальной частью корпуса устройства, предотвращающей проваливание животного в пространство между лентой и фронтальной частью корпуса устройства.
9. Устройство по п. 1, отличающееся тем, что элементы управления узлом электропривода и электрическими шокерами включают электрическую схему питания и управления, блок управления беговой дорожкой, выполненный с возможностью формирования сигналов управления скоростью вращения электродвигателя и силой тока, передаваемого на шокеры, индикаторы электропитания, регуляторы скорости электродвигателя, регулятор силы тока, подаваемого на шокеры, кнопку пуска/остановки электродвигателя, кнопку включения устройства в сеть, кнопку перезагрузки микроконтроллера, входящего в состав блока управления беговой дорожкой, при этом электрическая схема питания и управления выполнена с возможностью подключения к ней внешних устройств, обеспечивающих мониторинг и сбор экспериментальных данных.
10. Устройство по п. 1, отличающееся тем, что каждый съемный индивидуальный бокс представляет собой прямоугольный короб из оргстекла, нижняя часть которого является открытой, а верхняя часть снабжена дверцей на двух карточных петлях, зафиксированной магнитным элементом с противоположной стороны от петель, причем дверца смонтирована на продольной грани бокса с возможностью открывания на угол от 95 до 100° относительно горизонтальной поверхности.
11. Устройство по п. 1, отличающееся тем, что под транспортерными лентами размещен поддон.
12. Устройство по п. 3, отличающееся тем, что продольные пластины и поперечный несущий элемент соединены посредством совмещения отверстий на пластинах и цилиндрических выступов несущего элемента, которые размещены на торцевых поверхностях поперечного несущего элемента так, что центральная ось цилиндрических элементов смещена в радиальном направлении от продольной оси поперечного элемента, при этом соединение продольных пластин и поперечного несущего элемента дополнительно зафиксировано винтовыми крепежными элементами, которые прижимают пластины к торцевым поверхностям несущего элемента за счет наличия на упомянутых торцевых поверхностях резьбовых отверстий, причем винтовые крепежные элементы застопорены герметизирующим составом.
13. Устройство по п. 3, отличающееся тем, что торцевые поверхности опорного вала имеют цилиндрические выступы, совмещенные с соответствующими отверстиями на пластинах для формирования соединения, причем пластины зафиксированы винтовыми элементами, которые ввинчены в тело опорного вала со стороны торцевых поверхностей, при этом винтовые элементы застопорены герметизирующим составом.
14. Устройство по п. 7, отличающееся тем, что зазор между лентами установлен равным не менее ширины выступов, отделяющих ленты друг от друга.
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ФИЗИЧЕСКОЙ НАГРУЗКИ У ЭКСПЕРИМЕНТАЛЬНЫХ ЖИВОТНЫХ | 2022 |
|
RU2796879C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ФИЗИЧЕСКОЙ НАГРУЗКИ У МЕЛКИХ ЛАБОРАТОРНЫХ ЖИВОТНЫХ БЕЗ И НА ФОНЕ ГИПОКСИИ | 2018 |
|
RU2677193C1 |
| БЕГУЩАЯ ДОРОЖКА | 2000 |
|
RU2195353C2 |
| CN 201341953 Y, 11.11.2009 | |||
| CN 101455590 B, 08.12.2010 | |||
| БЛАЖКО А.А | |||
| и др | |||
| Снижение риска развития состояния тромботической готовности при воздействии сверхпороговой физической нагрузки у крыс на фоне предварительного приема пантогематогена // Современные проблемы | |||

