Область техники
Изобретение относится к медицинской технике, в частности к аппаратам внешней скелетной фиксации (далее также «аппарат») с электромеханическими приводами, к устройствам, применяемым в травматологии и ортопедии для автоматического дозированного перемещения костных фрагментов.
Может быть использовано в качестве системы, контролирующей и регулирующей оптимальную скорость удлинения сегмента конечности через узлы перемещения в аппаратах внешней фиксации. Изобретение обеспечивает возможность высокодробного круглосуточного пространственного перемещения костных фрагментов в автоматическом режимах управления аппаратом.
Из существующего уровня техники известна автоматизированная пространственная рама (ортопедическое устройство) и используемые с ней автоматизированные распорки, системам и способ для лечения переломов (US 20220354539 A1). Содержит несколько автоматических стоек, для выдвижения и втягивания в ответ на один или несколько электрических сигналов. Блок управления, электрически подключенный к одной или нескольким из множества автоматических стоек, блок управления, для подачи одного или нескольких электрических сигналов на множество автоматических стоек. Источник питания для питания нескольких автоматических стоек. Вычислительное устройство, которое выполняет команды управления. Автоматизированная пространственная рама может быть скомпонована и сконфигурирована так, чтобы определять, когда целесообразно демонтировать раму, на основе, например, данных измерений усилия на распорке, полученных от датчиков нагрузки или тензодатчиков. Альтернативно, линейная механическая нагрузка стойки может быть определена косвенно через ток двигателя, расстояние, пройденное от поворотного энкодера, и энергию, подаваемую во время этого перемещения, как функцию изменения напряжения на конденсаторе. При использовании беспроводные интеллектуальные автоматизированные стойки расположены и сконфигурированы для приема и передачи данных по беспроводной сети, например, с помощью внешней вычислительной системы, такой как, например, приложение, запущенное на мобильном устройстве. В одном варианте осуществления беспроводная автоматизированная стойка включает в себя основной корпус, источник питания, электронную схему управления, двигатель, электрически соединенный с источником питания, при этом двигатель и источник питания размещены внутри основного корпуса, трансмиссию, соединенную с выходом двигателя, и стержень (например, резьбовой стержень, отводящий стержень, ходовой винт или тому подобное), соединенный с трансмиссией. Стойка может также включать в себя печатную плату (“PCB”), размещенную внутри основного корпуса, причем печатная плата расположена и сконфигурирована с возможностью включения и выключения двигателя при достижении стержнем стойки (например, стержнем с резьбой, отводящим стержнем, ходовым винтом или подобным) определенного положения. Кроме того, стойка может включать в себя датчик вращательного положения и линейный датчик положения, электрически соединенные с печатной платой. Более того, стойка может включать в себя возможности самодиагностики/мониторинга состояния. В одном варианте осуществления система включает в себя внешний фиксатор, включающий в себя множество беспроводных автоматизированных стоек, датчик, расположенный на внешнем фиксаторе, для обеспечения идентификации стойки и контроллер, контроллер включает в себя модуль беспроводной связи, память и процессор для отправки или приема плана лечения, при этом контроллер взаимодействует со стойками, чтобы командовать стойками следовать плану лечения. Стойка может также включать в себя печатную плату, размещенную внутри основного корпуса, печатная плата включает регулятор напряжения, трансформатор, амперметр, модуль беспроводной связи, датчик нагрузки и акселерометр, микроконтроллер и память, при этом печатная плата включает и выключает двигатель при достижении датчиком нагрузки определенного значения. Кроме того, стойка может включать в себя датчик вращательного положения и линейный датчик положения, электрически соединенные с печатной платой. например, силовой датчик 230 для мониторинга напряжений и нагрузок через костный зазор и/или мягкие ткани (мышцы, соединяющийся хрящ или периферические чувствительные нервы), сенсорно-моторную опору 232 и т.д Платформа может включать в себя разъем micro-USB, расположенный рядом с каждым из шарниров для подключения к автоматизированной стойке, наряду с по меньшей мере одним дополнительным разъемом micro-USB для подключения к главному блоку управления. Интерфейсом беспроводной связи может быть, например, приемопередатчик Bluetooth для связи с внешней вычислительной системой 510, хотя интерфейс беспроводной связи может принимать любые другие формы, такие как, например, Wi-Fi, RF, инфракрасный или любой другой подходящий способ связи. В качестве альтернативы и/или в дополнение главный блок управления 300 может включать в себя USB-порт для приема USB-накопителя для обмена данными с внешней вычислительной системой 510. Главный блок управления может передавать данные распорки обратно пациенту или хирургу через, например, внешнюю вычислительную систему, такую как мобильное приложение, работающее на смартфоне, планшете и т.д., для обеспечения регулярных обновлений хода выполнения плана лечения через Bluetooth, RF, инфракрасное излучение, Wi-Fi или любой другой подходящий способ связи, который обеспечивает двунаправленную связь между главным блоком управления и мобильным приложением. Пример компонентов каждой автоматизированной стойки включает в себя: встроенный микроконтроллер; регулятор, входной конденсатор; привод двигателя; и датчик тока с токовым шунтирующим монитором. В проиллюстрированном варианте осуществления микроконтроллер 1061 может иметь номер детали ATSAMD11D14A-UU от Microchip Technology Inc., размер: 2,43 мм×1,93 мм, с 16 кБ флэш-памяти и 4 кБ энергозависимой памяти; конденсатор может иметь номер детали C3216X5R1E476M160AC, доступный от TDK, размер: 11 мм2; регулятор может иметь номер детали LMZM23601V3SILR от Texas instruments, размер: 19 мм2; входной конденсатор может иметь номер детали C2012X5R1V106K085AC от TDK, размер: 7 мм2; драйвер двигателя может иметь номер детали H-Bridge Motor Driver DRV8876 от Texas Instruments, размер 3,0×3,0 мм2; и текущий шунтирующий монитор может иметь номер детали INA138 от Texas Instruments. Блок управления сконфигурирован для приема данных плана лечения, которые могут запускаться в приложениях, работающих с библиотекой dynamic link library (DLL), таких как LabVIEW, Visual Basic или другие среды разработки на C/C++. Блок управления 1030 может также включать в себя инструкции для встроенного алгоритма, который преобразует данные из плана обработки коррекции текстового файла (например, JSON, XML и YAML) в формат, который может использоваться для индивидуального управления длиной автоматизированных стоек 1060. Таким образом, обеспечивается контроль положения “синхронизированных” автоматических стоек 1060. Блок управления 1030 также может быть скомпонован и сконфигурирован для отправки команд, инструкций, сигналов и т.д. к каждой из автоматизированных стоек 1060 (например, к каждому из встроенных микроконтроллеров 1061) посредством, например, последовательного кабельного соединения.
Недостатки указанного аналога заключаются в следующем. Изложены общие принципы построения системы управления автоматизированными платформами и передачи данных с них врачу. Методы измерения усилия на автоматизированных стойках также описаны в общем виде на основе известных методов измерения без привязки к конкретным конструкциям аппаратов, что не позволяет судить об их применимости в малогабаритных устройствах приводов. Кроме того, способы измерения усилия с помощью зарядного конденсатора или по току электродвигателя неприемлемы ввиду их низкой точности измерения. В данном аналоге приведены чисто теоретически возможности автоматизированной платформы без конкретного описания. способа управления процессом дистракционного остеосинтеза, а уровень достижения датчиком нагрузки для включения и выключения не определен. Не определен процесс управления при непрерывном росте дистракционных усилий.
Известна «Система контроля дистракционных усилий в процессе автоматизированного удлинения конечности» [Блынский Федор Юрьевич, Сульдин Максим Петрович Система контроля дистракционных усилий в процессе автоматизированного удлинения конечности // Векторы благополучия: экономика и социум. 2013. №3 (9). URL: https://cyberleninka.ru/article/n/sistema-kontrolya-distraktsionnyh-usiliy-v-protsesse-avtomatizirovannogo-udlineniya-konechnosti].
Авторы предлагают модуль измерения дистракционных усилий с использованием мостового включения тензорезисторных датчиков и принципиальную схему модуля, создано приложение с интерфейсом для визуализации дистракционных усилий.
Недостатки указанного аналога заключаются в следующем. Метод измерения силы, приложенной к конечности, рассчитывается с использованием двух неизвестных переменных:
S площади поперечного сечения удлиняемого сегмента костной ткани, которая практически неизвестна и требует измерения при рентгенографии, а также постоянно может изменяться;
К модуля упругости костной ткани, который также неизвестен для вновь образуемого костного регенерата, морфологические данные которого меняются в ходе дистракционного остеосинтеза.
Таким образом, предложенный метод измерения усилия практически невыполним без дополнительных измерений, для которых аппаратура не разработана.
Авторы предложили вести критический уровень дистракционных усилий (60 кгс), превышение которого требует от врача снизить темп дистракции и, наоборот, если натяжение будет ниже требуемого уровня, то увеличить скорость удлинения.
Такое представление о процессе регенерации тканей является принципиально ошибочным. Дело в том, что изначально дистракционные усилия являются лишь отражением сопротивления растяжению со стороны мягких тканей (кожные покровы, фасции, мышцы) и не превышают 20-25 кгс, а все что выше этого уровня связано с сопротивлением вновь образующейся костной ткани (дистракционного регенерата кости), которая имеет свои морфологические особенности. Поэтому, если врач, обнаружив превышение дистракционными усилиями критического уровня, начнет снижение темпа дистракции, как рекомендуют авторы статьи, он получит осложнение в виде преждевременной консолидации, не завершит удлинения и не решит поставленной задачи. И, наоборот, если врач начнет поддерживать низкий уровень дистракционных усилий за счет увеличения темпа дистракции, он может получить осложнение в виде замедленной консолидации вплоть до псевдоартроза и дефекта удлиняемой кости. Отсутствие в последующем клинических публикаций свидетельствует о неправильно выбранном направлении исследования и принципиальной нежизнеспособности предложения.
Известен чрескостный автоматизированный дистракционный аппарат и автоматический узел перемещения (патент RU 2763644), содержащий опоры, соединенные между собой автоматическими узлами перемещения (до 6 штук), каждый из которых включает в себя мотор-редуктор, с контроллером, датчик продольного усилия ходового винта, электрически связанный с контроллером. Аппарат содержит базовый блок, предназначенный для размещения источника питания и элементов связи с внешними устройствами обработки данных (персональный компьютер, смартфон и т.п.). Базовый блок и контроллер предназначены для автоматического управления механизмами по заранее составленной программе. Плата управления с контроллером, соединена электрически с базовым блоком управления, выполненным с возможностью введения программы лечения, выраженной через динамику дистракционных усилий и отражаемой на смартфоне, планшете или персональном компьютере.
Аппарат обладает интеллектуальную обратную связью с системой контроля дистракционных усилий в процессе автоматизированного удлинения конечности. Система контроля и перемещения сформирована на принципе обратной связи при контроле дистракционных усилий, возникающих в аппарате (в сумме со всех узлов перемещения). Врач анализирует процесс удлинения конечности по динамике суммарных дистракционных усилий визуально по интерфейсу и имеет возможность менять темп дистракции на каждом стержне перемещения от 0,5 до 3,0 мм/сутки. Дополнительным средством контроля является периодическая рентгенография дистракционного регенерата. При нормальном процессе наблюдается плавный рост дистракционных усилий от 0 до 600 H и в этих условиях врач не меняет темп и ритм дистракции (1 мм/сутки).
При пониженном процессе репаративной регенерации костной ткани уровень дистракционных усилий обычно не превышает 200-250 Н и врач устанавливает темп дистракции в 0,5 мм/сутки.
При повышенной репаративной регенерации костной ткани (опасность преждевременной консолидации костных фрагментов) отмечается резкое повышение уровня дистракционных усилий (выше 600 Н) и врач меняет темп дистракции, повышая его до 2 и даже 3 мм/сутки.
Недостатки указанного аналога заключаются в следующем. Блок управления не позволяет самостоятельно контролировать и анализировать процесс удлинения в реальном времени. Блок управления не анализирует ход дистракции во времени и поэтому не может самостоятельно управлять режимом удлинения в зависимости от данных, получаемых в процессе измерений, отражающих динамику изменения дистракционных усилий во времени.
Задачей изобретения является разработка способа комбинации хирургических и биомеханических технологий при замещении костных дефектов и удлинения конечности.
Технический результат заключается в обеспечении управления процессом дистракционного остеосинтеза на основе обратной связи с дистракционными усилиями в автоматизированном чрескостном компрессионно-дистракционном аппарате.
Технический результат достигается тем, что система управления процессом дистракционного остеосинтеза на основе обратной связи с дистракционными усилиями чрескостного компрессионно-дистракционного аппарата с автоматическими узлами перемещения, содержащим процессорный блок управления, подающий на узлы перемещения команды в соответствии с заданной врачом программой лечения и записывающий в свою память ход дистракции во времени в виде усилия дистракции на каждом узле перемещения, поступающего с датчика усилия узла, и отражающий ход дистракции в виде графика на дисплее персонального компьютера, при этом блок управления сконструирован с возможностью формировать график изменения дистракционных усилий во времени, определять тангенс угла касательной точки измерения в данный момент времени к линии абсцисс и, сопоставляя угол наклона с заданными предельными значениями, формировать управляющие команды на узлы перемещения в соответствии с заданным алгоритмом темпа дистракции. Способ управления процессом дистракционного остеосинтеза на основе обратной связи с дистракционными усилиями в автоматизированном чрескостном компрессионно-дистракционном аппарате, в котором в ходе дистракции записывают в блок управления изменения дистракционных усилий во времени, определяют тангенс угла касательной в точке измерения к оси абсцисс, формируют управляющие команды на узлы перемещения в соответствии с заданной врачом программой лечения и заданными предельными значениями тангенса угла относительно узловых точек кривой суммарных дистракционных усилий, при этом измеряют и фиксируют время в момент измерения усилия, а также фиксируют узловые точки кривой для автоматического изменения темпа и ритма дистракции.
Указанная задача решается тем, что в систему управления процессом дистракционного остеосинтеза в автоматизированном чрескостном компрессионно-дистракционном аппарате вводится обратная связь с дистракционными усилиями, на основе анализа данных измерений усилий в течение заданного реального времени. При этом программа управления основана на клинически установленной зависимости необходимого темпа дистракции на отдельных участках типовой кривой дистракции.
Ранее доказано, что на уровень дистракционных усилий, их динамику, сроки лечения оказывают влияние такие факторы, как этиология заболевания, величина укорочения, атрофия мягких тканей, мышечная сила и амплитуда движений смежных суставов, количество рубцовой ткани от предшествующих оперативных вмешательств. Выбор оптимального темпа дистракции базируется на учете всех показателей. Доказана однотипность динамики дистракционных усилий при удлинении конечностей. Это подтверждает наличие общих закономерностей процесса дистракционного остеосинтеза. Однако значительно различается о уровень усилий, причем наибольший уровень отличается при врожденном укорочении конечности и при укорочении после перенесенного полиомиелита [Попков А.В., Попков Д.А., 2012]. Последнее затрудняет использование абсолютного значения дистракционных усилий в реальном времени для управления процессом удлинения. Более реально дать однотипное описание угла наклона кривой, причем сам по себе угол наклона мало характеризует сам процесс. В вот тангенс угла tgα между касательной к кривой и осью абсцисс можно использовать для уравнения прямой на координатной плоскости.
y=kx+b
Число k= tgα называется угловым коэффициентом прямой. Через этот угол определяется геометрический смысл производной. Значение производной функции в искомой точке численно равно тангенсу угла наклона касательной к функции в этой точке.
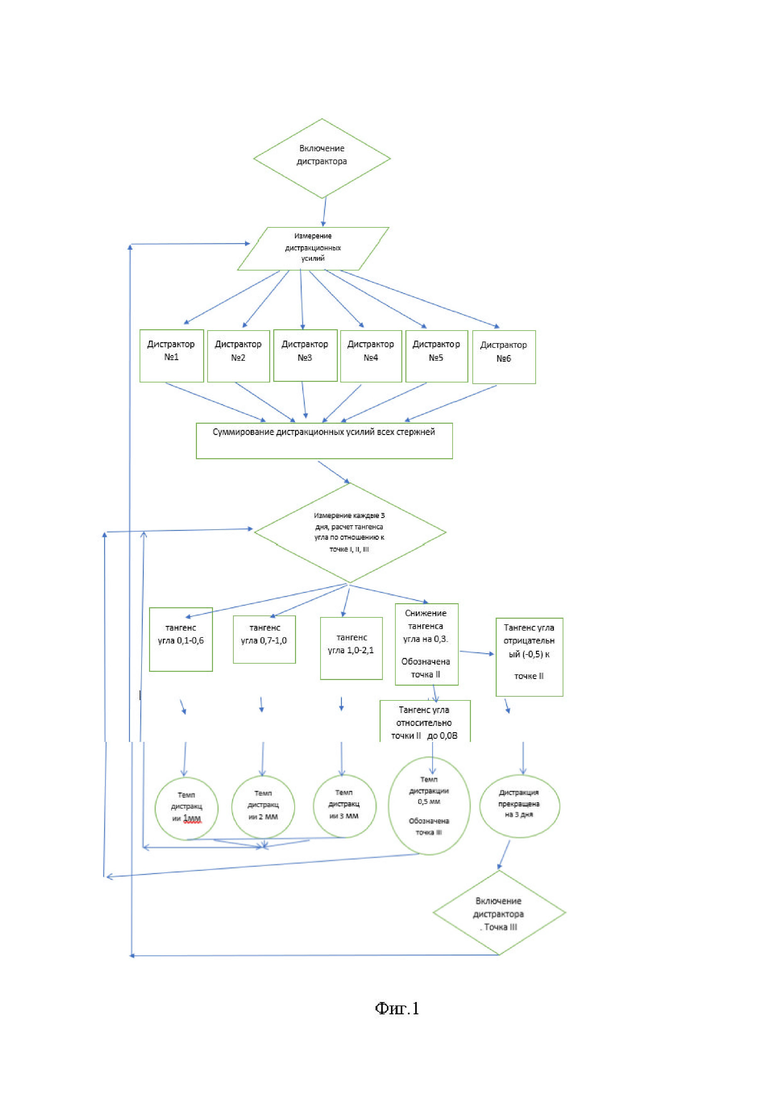
Новым является то, что установлен способ управления процессом дистракционного остеосинтеза на основе обратной связи с дистракционными усилиями в автоматизированном чрескостном компрессионно-дистракционном аппарате, в котором в ходе дистракции записывают в блок управления изменения дистракционных усилий во времени, определяют тангенс угла касательной в точке измерения к оси абсцисс, формируют управляющие команды (электрические сигналы) на узлы перемещения в соответствии с заданной врачом программой лечения и заданными предельными значениями тангенса угла относительно узловым точкам кривой суммарных дистракционных усилий. Для этого в блок управления введено измерение и фиксация текущего времени в момент измерения усилия, фиксация узловых точек кривой для автоматического изменения темпа и ритма дистракции (см. алгоритм управления на фиг.1).
Изобретение поясняется иллюстративным материалом:
Фиг. 1 - алгоритм автоматического управления удлинением конечности при обратной связи с дистракционными усилиями;
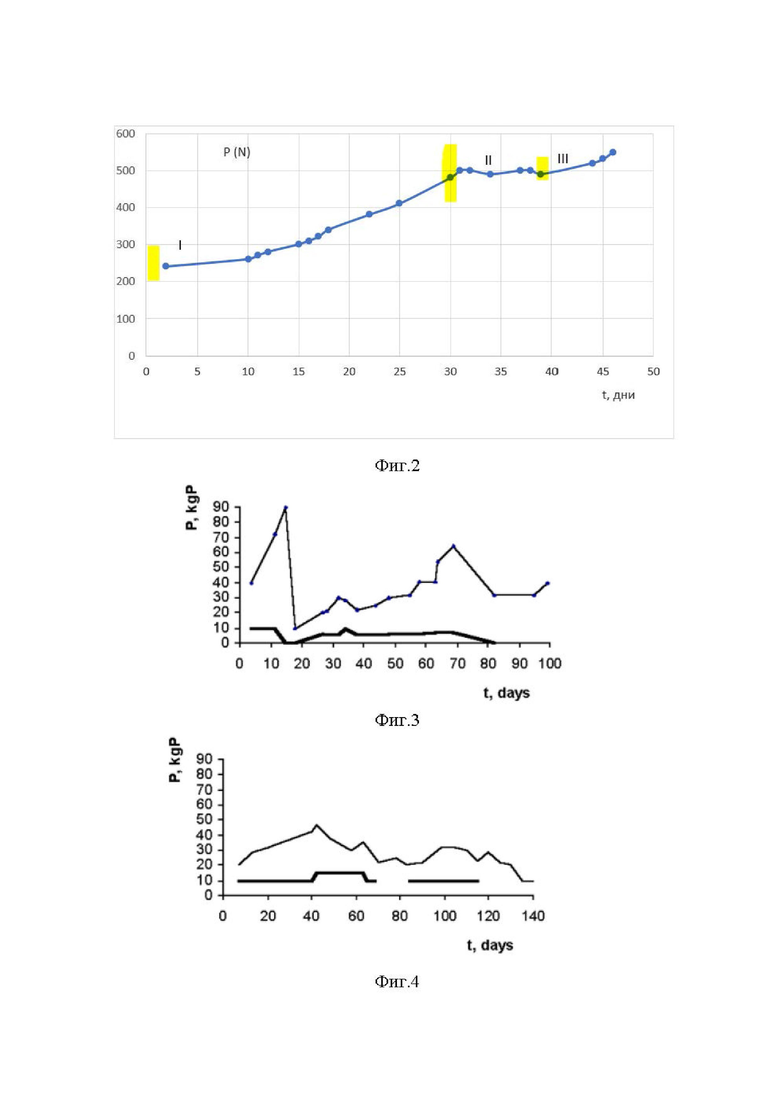
Фиг. 2 - динамика дистракционных усилий при автоматическом удлинении конечности: обозначены I, II и III узловые точки отсчета
Фиг. 3 - динамика дистракционных усилий при неполной остеотомии голени (нижняя кривая отражает темп дистракции).
Фиг. 4 - быстрое падение дистракционных усилий при удлинении голени (нижняя кривая отражает темп дистракции).
Фиг. 5 - динамика дистракционных усилий у больного К. при билокальном удлинении бедра: I проксимальная подсистема аппарата Илизарова; II дистальная подсистема аппарата Илизарова.
Осуществление изобретения.
Система управления процессом дистракционного остеосинтеза на основе обратной связи с дистракционными усилиями чрескостного компрессионно-дистракционного аппарата с автоматическими узлами перемещения, содержащим процессорный блок управления, подающий на узлы перемещения команды в соответствии с заданной врачом программой лечения и записывающий в свою память ход дистракции во времени в виде усилия дистракции на каждом узле перемещения, поступающего с датчика усилия узла, и отражающий ход дистракции в виде графика на дисплее ПК, смартфона и т. п., отличающаяся тем, что блок управления сконструирован с возможностью формировать график изменения дистракционных усилий во времени, определять тангенс угла касательной точки измерения в данный момент времени к линии абсцисс и сопоставляя угол наклона с заданными предельными значениями формировать управляющие команды (эл. сигналы) на узлы перемещения в соответствии с заданным алгоритмом оптимальным темпом дистракции.
Способ управления процессом дистракционного остеосинтеза на основе обратной связи с дистракционными усилиями в автоматизированном чрескостном компрессионно-дистракционном аппарате, в котором в ходе дистракции записывают в блок управления изменения дистракционных усилий во времени, определяют тангенс угла касательной в точке измерения к оси абсцисс, формируют управляющие команды (электрические сигналы) на узлы перемещения в соответствии с заданной врачом программой лечения и заданными предельными значениями тангенса угла относительно узловым точкам кривой суммарных дистракционных усилий. Для этого в блок управления введено измерение и фиксация текущего времени в момент измерения усилия, фиксация узловых точек кривой для автоматического изменения темпа и ритма дистракции.
Система управления предусматривает, что поддерживается рост дистракционных усилий при тангенсе угла 0,1-0,6 с типичной динамической кривой при оптимальном темпе дистракции в 1,0 мм/сутки.
Система управления предусматривает, что что поддерживается рост дистракционных усилий при тангенсе угла 0,7-1,0 с типичной динамической кривой при оптимальном темпе дистракции в 2,0 мм/сутки.
Система управления предусматривает, что поддерживается рост дистракционных усилий при тангенсе угла 1,0-2,1 с типичной динамической кривой при оптимальном темпе дистракции в 3,0 мм/сутки.
Система управления предусматривает, что сниженнии тангенса угла на 0,3 фиксируется узловая точка II на динамической кривой дистракционных усилий, снижается темп дистракции до 0,5 мм/сутки вплоть до начала последующего роста дистракционных усилий, отраженном в росте тангенса угла относительно узловой точки II.
Система управления предусматривает, что при снижении тангенса угла относительно узловой точки II до отрицательной величины (-0,5) дистракция прекращается на 3 дня и фиксируется узловая точка III на динамической кривой дистракционных усилий, с последующим включением автоматической дистракции.
Порядок работы, использования:
Динамический контроль за суммарным уровнем дистракционных усилий преодолеваемым аппаратом внешней фиксации позволяет регулировать темп и ритм дистракции или компрессии на каждом стержне индивидуально. А это в свою очередь обеспечивает возможность дозированного исправления любой деформации одновременно с удлинением сегментов конечности.
Автоматический круглосуточный высокодробный режим удлинения конечности переносится больными значительно легче (безболезненно) по сравнению с общепринятой методикой удлинения аппаратом Илизарова: практически не наблюдается воспаления мягких тканей в области спиц, нет отеков удлиняемой конечности и нарушений чувствительности. Все это позволяет пациентам быть более активными, увеличивать функциональную нагрузку, что несомненно положительно сказывается на репаративной регенерации тканей.
Рентгено-радиологические исследования позволили установить преимущество в интенсивности костеобразования при автоматической дистракции. Уже через две недели дистракции обнаруживаются первые признаки костного регенерата в виде лёгкой тени, заполняющей диастаз между костными фрагментами, а при дальнейшем удлинении, как правило, формируется непрерывный костный регенерат равномерной плотности без признаков так называемой «зоны роста», что свидетельствует о высокой репаративной активности кости.
Постоянный контроль дистракционных усилий позволяет точно характеризовать процесс репаративной регенерации кости и с помощью своевременного изменения темпа дистракции предотвратить возможные осложнения. Так, например, отсутствие полной остеотомии во время операции легко обнаружить по резкому (вертикальному) нарастанию усилий с первых дней дистракции тангенс угла составляет 2,1 и выше. В этом случае после повторной фрактуры или остеотомии уровень усилий снижается до нуля (фиг. 3).
Своевременное обнаружение уменьшения тангенса угла до отрицательных величин позволяет вовремя диагностировать нарушение связей между удлиняемыми тканями ( нарушение непрерывности костного регенерата), временно остановить удлинение , а после контрольной рентгенографии разобраться в причинах произошедшего и затем продолжить дистракцию через 23 дня более медленным темпом (фиг. 4).
Быстрый рост дистракционных усилий на этапе типичного удлинения, когда тангенс угла кривой дистракционных усилий достигает 2,7 и более свидетельствует об опасности преждевременной консолидации костных фрагментов. Подобное наблюдалось при билокальном удлинении бедра у больного К. (фиг. 5). Начало дистракции через 5 дней после операции. В течение 30 дней дистракционные усилия на обоих уровнях одинаково равномерно при тангенсе угла 0,9 после чего отмечен бурный рост дистракционных усилий в проксимальной подсистеме аппарата Илизарова тангенс угла 2,75 (до 700 Н). В то же время в дистальной подсистеме отмечено их резкое падение с 480 до 370 Н (тангенс угла -0,7).
По данным рентгенологического исследования установлено, что в проксимальной зоне произошло удлинение на 2,5 см, в дистальной на 5,5 см. Диагностирована консолидация проксимальных костных фрагментов и нарушение непрерывности дистального дистракционного регенерата. Дистракция была прекращена и после закрытой фрактуры на месте консолидации кости продолжена только в проксимальной зоне темпом 1,5 мм в сутки при тангенсе угла 0,7. Результат лечения: бедро было удлинено, как и планировалось, на 10 см.
Следует отметить, что любое отклонение графика дистракционных усилий аппарата Илизарова от типичной картины (фиг. 2) сопровождается предупреждающим сигналом на интерфейсе.
Технический результат, положительные эффекты, преимущества. Блок управления позволяет контролировать процесс перемещения костных фрагментов по длине, получить данные о дистракционных усилиях на каждом стержне аппарата внешней фиксации и суммарный уровень дистракционных усилий аппарата во времени и динамику усилий на протяжении необходимого отрезка времени. Визуальное наблюдение за динамикой усилий позволяет врачу обосновать необходимые изменения темпа и ритма дистракции. Блок управления обеспечивает возможность изменять режим удлинения автоматически без вмешательства врача, руководствуясь предельными значениями тангенса угла относительно узловым точкам кривой суммарных дистракционных усилий.
В систему управления процессом дистракционного остеосинтеза в автоматизированном чрескостном компрессионно-дистракционном аппарате вводится обратная связь с дистракционными усилиями, на основе анализа данных измерений усилий в течении заданного реального времени. При этом программа управления основана на клинически установленной зависимости необходимого темпа дистракции на отдельных участках типовой кривой дистракции.
Ранее доказано, что на уровень дистракционных усилий, их динамику, сроки лечения оказывают влияние такие факторы, как этиология заболевания, величина укорочения, атрофия мягких тканей, мышечная сила и амплитуда движений смежных суставов, количество рубцовой ткани от предшествующих оперативных вмешательств. Выбор оптимального темпа дистракции базируется на учете всех показателей. Доказана однотипность динамики дистракционных усилий при удлинении конечностей. Это подтверждает наличие общих закономерностей процесса дистракционного остеосинтеза. Однако значительно различается о уровень усилий, причем наибольший уровень отличается при врожденном укорочении конечности и при укорочении после перенесенного полиомиелита [Попков А.В., Попков Д.А., 2012]. Последнее затрудняет использование абсолютного значения дистракционных усилий в реальном времени для управления процессом удлинения. Более реально дать однотипное описание угла наклона кривой, причем сам по себе угол наклона мало характеризует сам процесс. В вот тангенс угла tgα между касательной к кривой и осью абсцисс можно использовать для уравнения прямой на координатной плоскости.
y=kx+b
Число k= tgα называется угловым коэффициентом прямой. Через этот угол определяется геометрический смысл производной. Значение производной функции в искомой точке численно равно тангенсу угла наклона касательной к функции в этой точке.
Новым является то, что установлен способ управления процессом дистракционного остеосинтеза на основе обратной связи с дистракционными усилиями в автоматизированном чрескостном компрессионно-дистракционном аппарате, в котором в ходе дистракции записывают в блок управления изменения дистракционных усилий во времени, определяют тангенс угла касательной в точке измерения к оси абсцисс, формируют управляющие команды (электрические сигналы) на узлы перемещения в соответствии с заданной врачом программой лечения и заданными предельными значениями тангенса угла относительно узловым точкам кривой суммарных дистракционных усилий. Для этого в блок управления введено измерение и фиксация текущего времени в момент измерения усилия, фиксация узловых точек кривой для автоматического изменения темпа и ритма дистракции.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧРЕСКОСТНЫЙ АВТОМАТИЗИРОВАННЫЙ ДИСТРАКЦИОННЫЙ АППАРАТ И АВТОМАТИЧЕСКИЙ УЗЕЛ ПЕРЕМЕЩЕНИЯ | 2021 |
|
RU2763644C1 |
| ШАРНИРНЫЙ УЗЕЛ К КОМПРЕССИОННО-ДИСТРАКЦИОННОМУ АППАРАТУ | 2006 |
|
RU2309694C2 |
| Компрессионно-дистракционный аппарат | 2017 |
|
RU2662711C1 |
| СПОСОБ ДИСТРАКЦИОННОГО ОСТЕОСИНТЕЗА | 1991 |
|
RU2102022C1 |
| СПОСОБ СТЕРЕОЛОГИЧЕСКОЙ ОЦЕНКИ ДИСТРАКЦИОННОГО ОСТЕОГЕНЕЗА, УЗЕЛ СОЕДИНЕНИЯ ОПОР АППАРАТА, ИСПОЛЬЗУЕМЫЙ ПРИ ЕГО ОСУЩЕСТВЛЕНИИ | 1996 |
|
RU2165243C2 |
| СПОСОБ ОЦЕНКИ РЕГЕНЕРАЦИИ СКЕЛЕТНОЙ МЫШЦЫ ПРИ ДИСТРАКЦИОННОМ ОСТЕОСИНТЕЗЕ | 1998 |
|
RU2142139C1 |
| АППАРАТ ДЛЯ ДИСТРАКЦИОННОГО ОСТЕОСИНТЕЗА КОСТЕЙ КИСТИ И СТОПЫ | 2011 |
|
RU2508063C2 |
| СПОСОБ ЗАМЕЩЕНИЯ ДЕФЕКТОВ ДЛИННЫХ ТРУБЧАТЫХ КОСТЕЙ ПРИ ХРОНИЧЕСКОМ ОСТЕОМИЕЛИТЕ | 1998 |
|
RU2161456C2 |
| СПОСОБ ПРОФИЛАКТИКИ КОНТРАКТУР КОЛЕННОГО СУСТАВА | 1997 |
|
RU2155545C2 |
| КОМПРЕССИОННО-ДИСТРАКЦИОННЫЙ АППАРАТ | 1994 |
|
RU2109492C1 |

Группа изобретений относится к медицинской технике, в частности к аппаратам внешней скелетной фиксации с электромеханическими приводами, к устройствам, применяемым в травматологии и ортопедии для автоматического дозированного перемещения костных фрагментов. Предложена система для реализации способа, которая служит для управления процессом дистракционного остеосинтеза на основе обратной связи с дистракционными усилиями чрескостного компрессионно-дистракционного аппарата с автоматическими узлами перемещения, содержащего процессорный блок управления, подающий на узлы перемещения команды в соответствии с заданной врачом программой лечения и записывающий в свою память ход дистракции во времени в виде усилия дистракции на каждом узле перемещения, поступающего с датчика усилия узла, и отражающий ход дистракции в виде графика на дисплее персонального компьютера, отличающаяся тем, что блок управления сконструирован с возможностью формировать график изменения дистракционных усилий во времени, определять тангенс угла касательной точки измерения в данный момент времени к линии абсцисс и, сопоставляя угол наклона с заданными предельными значениями, формировать управляющие команды на узлы перемещения в соответствии с заданным алгоритмом оптимальным темпом дистракции. Группа изобретений обеспечивает управление процессом дистракционного остеосинтеза на основе обратной связи с дистракционными усилиями в автоматизированном чрескостном компрессионно-дистракционном аппарате. 2 н. и 5 з.п. ф-лы, 5 ил.
1. Система управления процессом дистракционного остеосинтеза на основе обратной связи с дистракционными усилиями чрескостного компрессионно-дистракционного аппарата с автоматическими узлами перемещения, содержащего процессорный блок управления, подающий на узлы перемещения команды в соответствии с заданной врачом программой лечения и записывающий в свою память ход дистракции во времени в виде усилия дистракции на каждом узле перемещения, поступающего с датчика усилия узла, и отражающий ход дистракции в виде графика на дисплее персонального компьютера, при этом блок управления сконструирован с возможностью формировать график изменения дистракционных усилий во времени, определять тангенс угла касательной точки измерения в данный момент времени к линии абсцисс и, сопоставляя угол наклона с заданными предельными значениями, формировать управляющие команды на узлы перемещения в соответствии с заданным алгоритмом темпа дистракции.
2. Система управления по п. 1, отличающаяся тем, что поддерживается рост дистракционных усилий при тангенсе угла 0,1-0,6 на динамической кривой при темпе дистракции в 1,0 мм/сутки.
3. Система управления по п. 1, отличающаяся тем, что поддерживается рост дистракционных усилий при тангенсе угла 0,7-1,0 на динамической кривой при темпе дистракции в 2,0 мм/сутки.
4. Система управления по п. 1, отличающаяся тем, что поддерживается рост дистракционных усилий при тангенсе угла 1,0-2,1 на динамической кривой при темпе дистракции в 3,0 мм/сутки.
5. Система управления по пп.2-4, отличающаяся тем, что при снижении тангенса угла на 0,3 фиксируется узловая точка II на динамической кривой дистракционных усилий, снижается темп дистракции до 0,5 мм/сутки вплоть до начала последующего роста дистракционных усилий, отраженном в росте тангенса угла относительно узловой точки II.
6. Система управления по п. 5, отличающаяся тем, что при снижении тангенса угла относительно узловой точки II до величины «-0,5» дистракция прекращается на 3 дня и фиксируется узловая точка III на динамической кривой дистракционных усилий, с последующим включением автоматической дистракции.
7. Способ управления процессом дистракционного остеосинтеза на основе обратной связи с дистракционными усилиями в автоматизированном чрескостном компрессионно-дистракционном аппарате, в котором в ходе дистракции записывают в блок управления изменения дистракционных усилий во времени, определяют тангенс угла касательной в точке измерения к оси абсцисс, формируют управляющие команды на узлы перемещения в соответствии с заданной врачом программой лечения и заданными предельными значениями тангенса угла относительно узловых точек кривой суммарных дистракционных усилий, при этом измеряют и фиксируют время в момент измерения усилия, а также фиксируют узловые точки кривой для автоматического изменения темпа и ритма дистракции.
| ЧРЕСКОСТНЫЙ АВТОМАТИЗИРОВАННЫЙ ДИСТРАКЦИОННЫЙ АППАРАТ И АВТОМАТИЧЕСКИЙ УЗЕЛ ПЕРЕМЕЩЕНИЯ | 2021 |
|
RU2763644C1 |
| СПОСОБ ОСТЕОСИНТЕЗА ПЕРЕЛОМОВ ВЕРХНЕЙ ЧЕЛЮСТИ | 2008 |
|
RU2380051C1 |
| СПОСОБ ОСТЕОСИНТЕЗА ПЕРЕЛОМОВ И ПОВРЕЖДЕНИЙ СОЕДИНЕНИЙ КОСТЕЙ СПИЦАМИ | 2002 |
|
RU2218890C1 |
| US 20220354539 A1.11.2022. | |||

