Область техники, к которой относится изобретение
Изобретение относится к области военной техники, а именно к оптоэлектронным головкам самонаведения управляемых снарядов и ракет, и может быть использовано при разработке управляемых снарядов и ракет для их наведения на оптически контрастные цели.
Уровень техники
Известны оптико-электронные головки самонаведения управляемых ракет (ГСН) классов "воздух-воздух", "поверхность-воздух", "воздух-поверхность", "поверхность-поверхность" различной дальности действия:
1. Виртуальный авиационный справочник "Уголок неба", http://www.airwar.ru.
2. В. Сапков "Системы наведения управляемых ракет класса "воздух-воздух". Зарубежное военное обозрение. №10, 1987.
3. А.А. Шилин. Обзор пассивных оптических ГСН для поражения наземных тактических целей. Известия ТулГУ. Технические науки. 2014. Вып. 7.
4. Р. Щербинин. Головки самонаведения перспективных зарубежных управляемых ракет и авиабомб. Зарубежное военное обозрение № 4, 2009.
5. Патент RU 2756170 С1. Оптико-электронная многоканальная головка самонаведения.
6. Патент RU 196650 U1. Электронный блок головки самонаведения.
7. Патент RU 155212 U1. Электронный блок оптической головки самонаведения.
8. Патент RU 43956 U1. Оптическая головка самонаведения.
9. Патент RU 25791 U1. Оптическая головка самонаведения.
10. Патент RU 2419060 С2. Тепловая головка самонаведения ракеты, нечувствительная к генераторам инфракрасных пульсирующих помех.
Для управления полем зрения ГСН при наведение на заданную цель в известных устройствах применяется карданный подвес различных вариантов исполнения (фиг. 1):
1. Л.П. Лазарев. "Оптико-электронные приборы наведения". "Машиностроение", Москва, 1989 г.
2. Ю.П. Сафронов, Р.И. Эльман. "ИК-распознающие устройства". Москва, 1976 г.
3. Л.А. Борисенко и А.В. Самойленко. Механика роботов и манипуляторов с электроприводом. Минск. «Вышейшая школа» 1992 г.
4. В.И. Родионов, Д.А. Ветерков. Геометрия головки самонаведения с наклонным кардановым подвесом. Известия ТулГУ. Технические науки. 2012. Вып. 12. ч. 1.
5. Патент US № 4009393 G 01 J 1/00; F 41 G 7/00.
6. Патент US № 218.016.076 от 22.09.2010 г.
7. Патент US № 3441936 от 29.04.1969 г.
8. Патент RU № 2282285 от 20.08.2004 г.
9. Патент RU № 2644991 от 24.08.2016 г.
10. Патент RU № 2613344 от 16.03.2017 г.
Основным недостатком известных технических решений является применение подвеса Кардана, который имеет нелинейную зависимость угла установки биссектрисы, угла мгновенного поля зрения ГСН от углов отклонении оси подвеса одновременно в двух плоскостях:
1. Гироскопические системы. Проектирование гироскопических систем/под ред. Д.С. Пельпора. Ч.1. М.: Высшая школа, 1977.
2. Л.А. Борисенко и А.В. Самойленко. Механика роботов и манипуляторов с электроприводом. Минск. «Вышейшая школа» 1992 г.
Вторым недостатком известных технических решений является применение подшипниковых узлов для вращения рамок подвеса друг относительно друга. Малая поверхность контакта шариков (роликов) подшипника с обоймой, которая, в свою очередь, умноженная на прочность материала подшипника, определяет предельную нагрузку на оси вращения карданного подвеса, а значит - предельную продольную (стартовую) и радиальную перегрузку ракеты, допустимую для данной конструкции подвеса. При этом, как видно из фиг. 1, необходимость использования рамок подвеса, двигателей приводов вращения и датчиков углового положения определяет существенное увеличение отсека аппаратуры ГСН относительно размеров оптико-механического блока.
Третьим недостатком известных технических решений является значительная величина приведенной, вращающейся на кардановом подвесе массы, включающая собственно оптико-механический блок с оптическими приемниками, обе рамки карданового подвеса, серводвигатели и датчики углового положения рамок подвеса, etc. Значительная вращающаяся масса, с одной стороны, определяет инерционность как слежения ГСН за целью, так и парирования колебаний корпуса ракеты, с другой стороны, предъявляет значительные требования к мощности серводвигателей и их системы питания для поворота рамок повеса на заданный угол в заданное время.
Четвертый недостаток известных технических решений связан с необходимостью применения обтекателя ГСН с размерами, существенно превышающими размеры апертуры объектива ГСН.
Это обусловлено необходимостью обеспечения стрельбы ракетами «на параметре», когда траектория движения цели не проходит через место старта ракеты, а принцип наведения «в упрежденную точку» требует сопровождения цели ГСН ракеты под углом относительно направления полета ракеты (фиг. 2) (рис. 10 из книги «Самонаведение ракет. Ракетная техника, М., Воениздат, 1963 г.»).
Угол упреждения рассчитывается по формуле (ф. 10.15 из [Справочника офицера воздушно-космической обороны / под. ред. С.К. Бурмистрова. - Тверь, ВАВКО. - 2005 г.]):
 ,
,
где:
qр - угол между вектором скорости полета ракеты и линией «ракета - цель»;
qц - угол между вектором скорости полета цели и линией «ракета - цель»;
Vц - скорость полета цели;
Vр - скорость полета ракеты.
Поэтому для обеспечения стрельбы по цели «на параметре» оптико-механический блок ГСН должен иметь возможность разворачиваться в любую сторону на требуемый угол упреждения (в пределе до края обтекателя ГСН). Вследствие этого размер обтекателя ГСН существенно превышает размер апертуры объектива ГСН (фиг. 3).
При этом апертура объектива ГСН определяет величину энергии сигнала, принимаемого от цели, и значит определяет дальность действия ГСН. [Грузевич Ю.К. Оптико-электронные приборы ночного видения. - М.: Физматлит, 2014 г.]. Поэтому заданные на ракету дальность действия ГСН и углы визирования цели однозначно определяют размер обтекателя и калибр ракеты, часто неприемлемые из условий эффективности ее боевого применения.
Существенным следствием применения на ракете сферического обтекателя большого размера является также практическая невозможность достижения ракетой сверхзвуковой скорости полета, т.к. сферическая форма носового обтекателя, соизмеримая по размеру с калибром ракеты, при достижении ракетой трансзвуковой скорости вызывает образование на носовой части ракеты значительного по размеру плоского неприсоединенного скачка уплотнения, который существенно тормозит ракету при достижении ракетой звукового барьера.
В качестве прототипа изобретения может быть рассмотрен Патент РФ № RU 2810677 C1 «Устройство изменения ориентации поля зрения головки самонаведения ракеты». Несущая конструкция оптико-механического блока ГСН выполнена в виде сферической шаровой опоры. Фиксация осей системы координат объектива или антенны ГСН относительно осей системы координат ракеты достигается тем, что шаровая опора оптико-механического блока совместно с вогнутым основанием ГСН выполняется по схеме шарнира равных угловых скоростей.
Такое техническое решение позволяет значительно снизить размеры подвеса оптико-механического блока в комплексе с серводвигателями и датчиками углового положения рамок подвеса и, тем самым, парировать или существенно уменьшить влияние первых трех недостатков рассмотренных аналогов изобретения.
Однако, применительно к проблеме перехвата целей «на параметре» недостатком прототипа изобретения остается необходимость использования обтекателя, размеры которого определяются размерами апертуры объектива ГСН и требуемыми углами упреждения (отклонения ГСН от строительной оси ракеты) для сопровождения цели (фиг. 2, 3).
Раскрытие сущности изобретения.
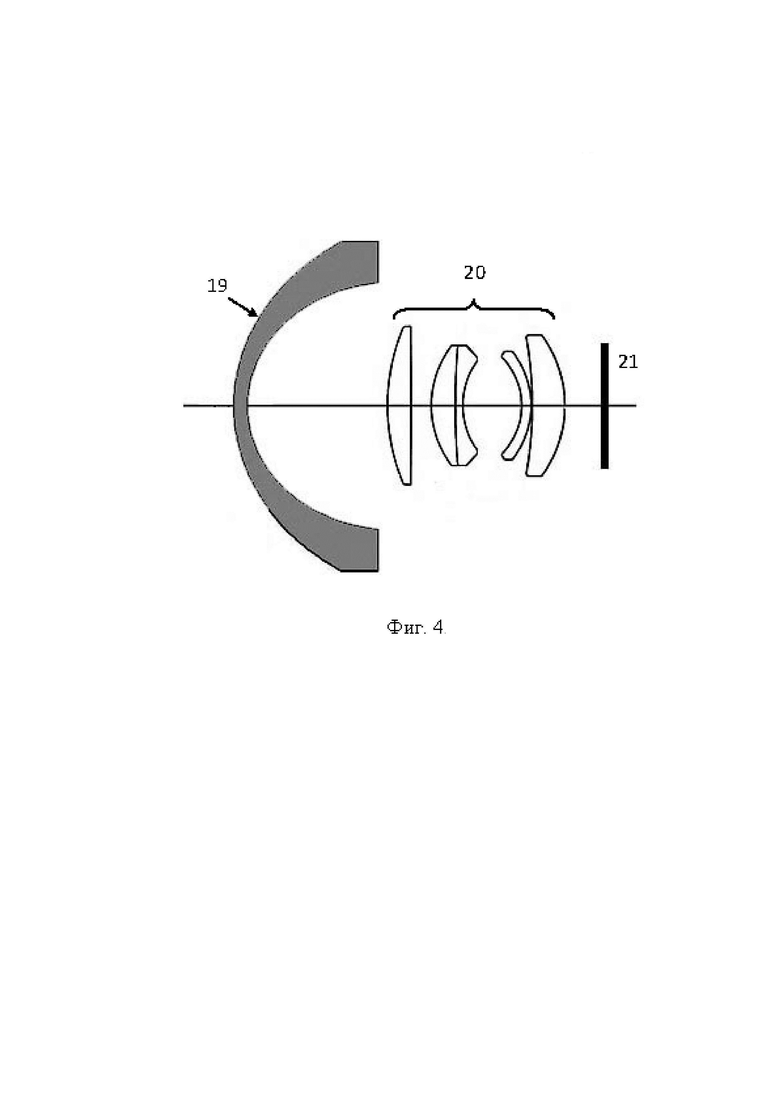
Сущность предлагаемой конструкции оптико-электронной головки самонаведения ракеты основана на выполнении оптико-механического блока ГСН в виде неподвижной конструкции, закрепленной вдоль продольной оси ракеты. Обтекатель оптико-механического блока выполнен в виде асферической выпукло-вогнутой линзы, выполняющей роль афокальной насадки. Оптико-механический блок ГСН совместно с обтекателем - афокальной насадкой составляют дисторсирующий широкоугольный объектив, совмещенной с оптической матрицей (фиг. 4).
Дисторсирующие широкоугольные объективы считаются неприемлемыми в качестве объектива изобразительного средства для традиционных применений в фото-, кино- и видеосъемке, т.к. меняют видимую форму отображаемых предметов, поскольку любая проекция сферического обзора на плоскость неизбежно приводит к искажениям наблюдаемых объектов, соответствующим азимутальной, ортографической или стереографической проекциям. Предпочтительность использования в предлагаемой оптико-электронной ГСН дисторсирующего широкоугольного объектива определяется взаимной линейной зависимостью отклонения сфокусированной объективом яркостной отметки от цели относительно центра оптической матрицы и углового отклонения линии визирования цели относительно строительной оси ракеты. Линейная зависимость угловых измерений положения линии визирования цели относительно строительной оси ракеты в единицах пикселей оптической матрицы существенно упрощает алгоритмы управления самонаведением ракеты.
Для наведения поля зрения ГСН по данным предварительного целеуказания (ЦУ) от системы управления ракетой на заданную цель достаточно указать номера пикселей оптической матрицы по осям Х и У, соответствующим ожидаемому угловому положению цели относительно строительной оси ракеты в плоскостях курса и тангажа. Размер поля зрения ГСН для поиска цели в заданном по данным ЦУ направлении определяется по выдаваемому системой управления ракетой доверительному интервалу точности ЦУ по цели по осям курса и тангажа, рассчитываемому в пикселях оптической матрицы. В целях снижения потерь энергии обнаруживаемого сигнала от цели вследствие косого падения лучей на фотодиоды матрицы при больших углах отклонения от оси объектива и затенения углов матрицы оптико-механический блок ГСН целесообразно выполнять по схеме телецентрического объектива.
Технический результат предлагаемого технического решения заключается в:
- обеспечении линейной зависимости положения яркостной отметки от цели на плоской оптической матрице от углового положения линии, визирование цели относительно строительной оси ракеты, что существенно упрощает алгоритмы управления самонаведением ракеты;
- отсутствии ограничений на предельную продольную (стартовую) и радиальную перегрузки ракеты за счет исключения из конструкции ГСН подшипниковых узлов и рамок подвеса оптико-механического блока;
- отсутствии ограничений на скорость отработки целеуказаний и скорость углового сопровождения цели ГСН, парирования колебаний корпуса ракеты за счет исключения из конструкции ГСН инерционной приведенной вращающейся на кардановом подвесе массы, включающей собственно оптико-механический блок с оптическими приемниками, обе рамки карданового подвеса, серводвигатели и датчики углового положения рамок подвеса, etc;
- полностью цифровом управлении работой ГСН ракеты за счет исключения механических систем наведения поля зрения ГСН на заданную цель;
- снижении размеров обтекателя ГСН ракеты в пределе до размеров минимально необходимого размера апертуры объектива ГСН;
- обеспечении возможности применения всеракурсных оптико-электронных ГСН на сверхзвуковых ракетах за счет значительного снижения радиуса затупления носка ракеты и снижении за счет этого размеров плоского неприсоединенного скачка уплотнения на носке ракеты, снижения тем самым общего коэффициента сопротивления Сх ракеты при преодолении звукового барьера;
- снижении себестоимости изготовления ракеты по сравнению с известными ракетами, оснащенными оптико-электронной ГСН с пропорциональным увеличением их серийной способности.
Краткое описание чертежей
Фиг. 1. Конструктивно-компоновочная схема оптоэлектронной ГСН.
1 - оптический обтекатель;
2 - объектив оптико-механического блока;
3 - ось наведения по углу тангажа;
4 - серводвигатель наведения по азимуту;
5 - оптико-механический блок в сборе;
6 - корпус ГСН;
7 - корпус ракеты.
Фиг. 2. Треугольник решения задачи наведения «в упрежденную точку».
8 - вектор скорости полета цели;
9 - вектор скорости полета ракеты;
10 - линия «ракета - цель»;
11 - угол между вектором скорости полета ракеты и линией «ракета - цель»;
12 - угол между вектором скорости полета цели и линией «ракета - цель»;
13 - расчетная точка встречи ракеты и цели.
Фиг. 3. Соотношение размеров объектива ГСН и оптического обтекателя ракеты.
14 - объектив оптико-механического блока;
15 - обтекатель оптико-механического блока;
16 - ось поворота по углу крена;
17 - ось поворота по азимуту;
18 - угол между направлением полета ракеты и линией «ракета - цель».
Фиг. 4. Оптическая схема ГСН с оптическим обтекателем ракеты.
19 - обтекатель оптико-механического блока - афокальна насадка в виде асферической выпукло-вогнутой линзы;
20 - широкоугольный объектив по схеме «Flektogon»;
21 - светочувствительная матрица в фокальной плоскости.
Осуществление изобретения
Осуществление изобретения обеспечивается:
- выполнением несущей конструкции оптико-механического блока в виде неподвижной конструкции, закрепленной вдоль продольной оси ракеты;
- выполнением обтекателя оптико-механического блока в виде асферической выпукло-вогнутой линзы, выполняющей роль афокальной насадки;
- выполнением оптико-механического блока ГСН совместно с обтекателем - афокальной насадкой по схеме дисторсирующего широкоугольного объектива с расположенной в его фокусе оптической матрицы;
- выполнением оптической схемы выходного окна оптико-механического блока ГСН по схеме телецентрического объектива;
- применением многоэлементной (многопиксельной) цифровой матрицы для измерения углового положения цели относительно продольной оси ракеты в плоскостях курса и тангажа.
| название | год | авторы | номер документа |
|---|---|---|---|
| АКТИВНАЯ ЛАЗЕРНАЯ ГОЛОВКА САМОНАВЕДЕНИЯ | 2013 |
|
RU2573709C2 |
| Комбинированная многоканальная головка самонаведения | 2017 |
|
RU2693028C2 |
| КООРДИНАТОР ГОЛОВКИ САМОНАВЕДЕНИЯ | 2016 |
|
RU2644991C1 |
| ПАССИВНАЯ ИНФРАКРАСНАЯ ГОЛОВКА САМОНАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ | 2001 |
|
RU2197709C2 |
| Устройство изменения ориентации поля зрения головки самонаведения ракеты | 2023 |
|
RU2810677C1 |
| Оптико-электронная многоканальная головка самонаведения | 2020 |
|
RU2756170C1 |
| ГИРОСКОПИЧЕСКОЕ СЛЕДЯЩЕЕ ЗА ЦЕЛЬЮ УСТРОЙСТВО САМОНАВОДЯЩЕЙСЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ РАКЕТЫ | 2009 |
|
RU2397435C1 |
| СПОСОБ УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ ПОДВИЖНОГО НОСИТЕЛЯ, ИНТЕГРИРОВАННАЯ СИСТЕМА, УСТРОЙСТВО ПРИВЕДЕНИЯ ЗЕРКАЛА АНТЕННЫ В ПОВОРОТНОЕ ДВИЖЕНИЕ В ДВУХ ВЗАИМНО ПЕРПЕНДИКУЛЯРНЫХ ПЛОСКОСТЯХ И УСТРОЙСТВО ПРИВЕДЕНИЯ В ДЕЙСТВИЕ ДИФФЕРЕНЦИАЛЬНЫХ АЭРОДИНАМИЧЕСКИХ РУЛЕЙ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2423658C2 |
| Способ вывода вращающейся по углу крена ракеты с гироскопом направления в зону захвата цели головкой самонаведения и система для его осуществления | 2017 |
|
RU2659622C1 |
| СПОСОБ НАВЕДЕНИЯ ПРОТИВОКОРАБЕЛЬНОЙ РАКЕТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2771076C1 |
Изобретение относится к области военной техники и касается оптико-электронной головки самонаведения (ГСН) управляемых ракет. Конструкция оптико-механического блока ГСН выполнена в виде неподвижной конструкции, закрепленной вдоль продольной оси ракеты, обтекателя оптико-механического блока, выполненного в виде асферической выпукло-вогнутой линзы, выполняющей роль афокальной насадки. Оптико-механический блок ГСН совместно с обтекателем - афокальной насадкой - выполнен по схеме дисторсирующего широкоугольного объектива с расположением оптической матрицы в его фокусе. Оптическая схема выходного окна оптико-механического блока ГСН выполнена по схеме телецентрического объектива. Для измерения углового положения цели относительно продольной оси ракеты в плоскостях курса и тангажа применена многоэлементная цифровая оптическая матрица. Технический результат изобретения заключается в упрощении конструкции устройства, обеспечении визирования цели под большими углами относительно строительной оси ракеты, снижении размера обтекателя и обеспечении возможности применения ГСН на сверхзвуковых ракетах. 4 ил.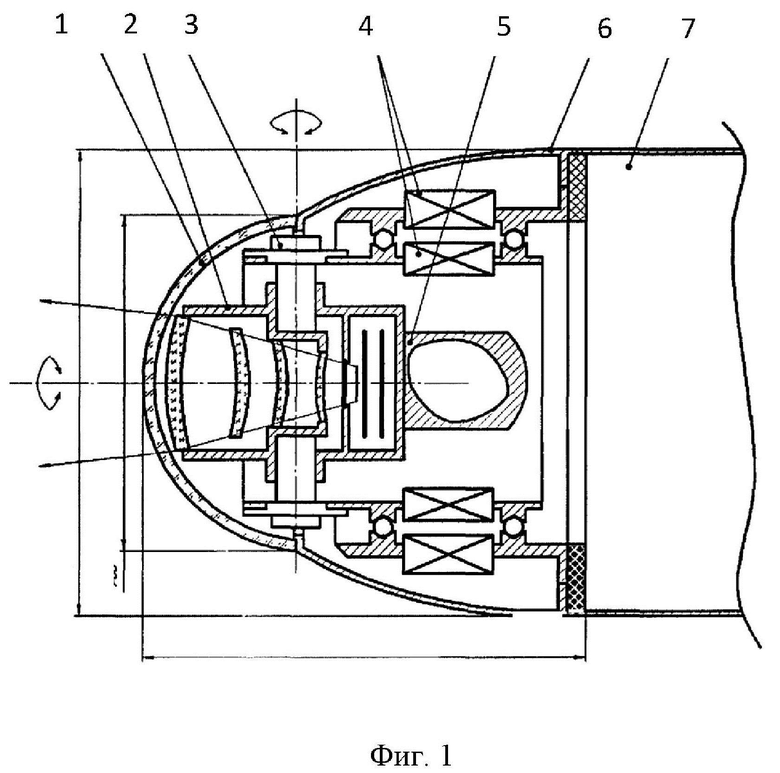
Оптико-электронная головка самонаведения (ГСН) управляемых ракет, конструкция которой обеспечивает визирование цели под большими углами относительно строительной оси ракеты, отличающаяся тем, что несущая конструкция оптико-механического блока выполнена в виде неподвижной конструкции, закрепленной вдоль продольной оси ракеты, обтекателя оптико-механического блока, выполненного в виде асферической выпукло-вогнутой линзы, выполняющей роль афокальной насадки, оптико-механический блок ГСН совместно с обтекателем - афокальной насадкой - выполнен по схеме дисторсирующего широкоугольного объектива с расположением оптической матрицы в его фокусе, оптическая схема выходного окна оптико-механического блока ГСН выполнена по схеме телецентрического объектива, для измерения углового положения цели относительно продольной оси ракеты в плоскостях курса и тангажа применена многоэлементная цифровая оптическая матрица.
| ОПТИЧЕСКАЯ СИСТЕМА КООРДИНАТОРА НАВЕДЕНИЯ АВИАЦИОННОЙ УПРАВЛЯЕМОЙ РАКЕТЫ С ШИРОКОПОЛОСНЫМ ФОТОПРИЕМНИКОМ | 2004 |
|
RU2280228C1 |
| US 2023392901 A1, 07.12.2023 | |||
| CN 101692138 B, 04.05.2011 | |||
| CN 103512427 A, 15.01.2014. | |||

