Изобретение относится к системам управления, стабилизации и высокоточного самонаведения подвижных носителей на заданный объект визирования (OB), содержащим устройства с изменяющейся ориентацией диаграммы направленности волн, излучаемых антенной, а именно поворотно-чувствительные устройства, основанные на использовании гироинерциальных датчиков сигналов пространственного перемещения подвижного носителя, а также устройства управления аэродинамическими рулями (АДР) подвижного носителя.
Изобретение предназначено для управления и стабилизации подвижного носителя в процессе его самонаведения на первоначально заданную точку прицеливания (ТП) при его движения по траектории автономно и/или при локационном контакте с OB, подвижным или неподвижным, и может быть использовано:
- в инерциальных измерительных системах, в частности системах инерциального измерения параметров вектора визирования заданного OB для автономного его пеленгования в двух взаимно перпендикулярных плоскостях в базовой антенной системе координат и инерциального его автосопровождения;
- в системах инерциального самонаведения подвижных носителей на заданный OB,
- в интегрированных комплексированных бортовых систем самонаведения (БССН) в составе систем управления и стабилизации подвижных носителей,
- в системах управления и стабилизации от короткопериодических колебаний относительно центра масс, в том числе и вращающихся по крену подвижных носителей,
- в системах управления и стабилизации направления линии (вектора) визирования антенных устройств, например радиолокационного и инерциального (автономного) автосопровождения OB,
- в системах управления АДР подвижных носителей.
При создании подвижных носителей с высокоточным самонаведением на первоначально заданный OB, оснащенных системой управления и стабилизации, содержащей интегрированную БССН, включающую в свой состав радиолокационное антенное устройство, содержащее двухосный карданов подвес, несущий акселерометры и гироприборы, важной задачей является:
- обеспечение качественного инерциального управления направлением на первоначально заданный OB зеркала, например, радиолокационного антенного устройства на автономном участке траектории самонаведения подвижного носителя,
- качественная ориентация диаграммы направленности волн, излучаемых устройством, основание которого жестко закреплено внутри носовой части корпуса головного отсека подвижного носителя, в том числе и вращающегося по крену, при качественной стабилизации (от короткопериодических колебаний подвижного носителя относительно своего центра масс) направления зеркала антенного устройства на заданный OB,
- одновременно при этом обеспечение высокоточного самонаведения подвижного носителя (в том числе и вращающегося по крену) на заданный OB,
- формирование сигналов управления и стабилизации подвижного носителя с высокоточным самонаведением на основе информации инерциального измерителя параметров вектора визирования (ИИПВВ) заданного OB как инерциальной измерительной системы,
- разработка технических и специальных конструкторских решений, обеспечивающих высокоточную и быстродействующую отработку сигналов управления и стабилизации направления вектора (линии) визирования заданного OB и отработку сигналов управления и стабилизации подвижного носителя, а также минимально возможные, технологически обоснованные массогабаритные характеристики аппаратуры системы управления и стабилизации, предназначенной для оснащения подвижных носителей различного назначения.
Известны, например, следующие способы управления и стабилизации, системы и устройства, осуществляющие их:
1. Способ аэробаллистического управления аэродинамическим летательным аппаратом (WO 49361 A1, 16.02.99, 7F41G 7/22), «который состоит в том, что летательный аппарат содержит инерциальную систему, бортовой вычислитель и активную радиолокационную или пассивную оптическую головку самонаведения. Согласно этому способу полет аэродинамического летательного аппарата происходит по произвольной траектории на ее нисходящей части до тех пор, пока не будет достигнут заданный разворот аппарата. Способ дополнительно предполагает изменение направления вектора скорости летательного аппарата и включение режима планирующего спуска. На участке снижения вектор скорости летательного аппарата последовательно меняет направление в вертикальной плоскости относительно его направления на вершине траектории».
2. Способ и устройство управления ракетой (WO 9939149 А1, 20.01.99, 6F41G 7/20, F42B 15/01), при котором «ракета имеет информацию о своем положении, векторе скорости и будущем профиле скорости, а также непрерывно принимает информацию о положении и векторе скорости цели. На основании указанной информации предсказывается положение точки А, в которой ожидается перехват цели. Затем вычисляется время полета ракеты до предсказанной точки А. Дополнительно вычисляется фиктивная точка В, в которой ожидается перехват ракетной цели, причем эта точка располагается на большей высоте, чем предсказанная точка перехвата. Расстояние между точками А и В зависит от вычисленного времени полета. Окончательно вектор скорости ракеты направляется в указанную фиктивную точку».
3. Система управления ракетами с алгоритмом работы, содержащим нелинейный коэффициент усиления (US 5975460 А, 10.11.97, 6F41G 7/00), которая «генерирует команды управления для наведения ракеты на цель и содержит систему управления для наведения ракеты на цель и содержит систему управления, вычислитель, блок, автопилот и комплект электромагнитных датчиков. Система управления получает текущие параметры наведения от датчиков ракеты и головки наведения. Параметры наведения содержат навигационные данные, скорость сближения с целью, скорость перемещения линии визирования, параметры маневренности ракеты и параметры скорости ракеты. Вычислитель при помощи программного обеспечения определяет текущий коэффициент усилия параметра наведения в зависимости от текущих характеристик маневренности ракеты. В отдельном варианте исполнения система содержит нелинейную цель, которая генерирует команду ускорения в зависимости от параметров наведения, которые варьируются при изменении параметров маневренности ракеты. Блок определяет закон наведения ракеты на цель. Автопилот обеспечивает заданные характеристики маневренности ракеты. Нелинейный коэффициент усиления является функцией отношения скорости перемещения линии визирования к максимальной скорости перемещения идеальной линии визирования и зависит от текущих характеристик ракеты».
4. Способ автономного управления артиллерийским снарядом, стабилизированным вращением, и автономный управляемый снаряд для осуществления способа (DE 19740888 А1, 17.09.97, 6F41G 7/00, F42В 30/08, G05D 1/12), предназначенный «для наведения на цель артиллерийского снаряда, стабилизированного вращением». При этом «требуется, чтобы снаряд точно попадал в цель при удалении ≥35 км. С этой целью предусмотрено передать на снаряд перед выстрелом предварительно определенные данные цели. После выстрела снаряда эти данные сравниваются с данными положения снаряда, обнаруженными с помощью спутниковой навигационной приемной станции. Данные коррекции, полученные из этого сравнения, применяются для управления снарядом. Для этого снаряд переводится незадолго до достижения фазы управления из состояния полета, стабилизированного вращением, в полет, стабилизированным оперением. Причем тогда аэродинамическое управление снарядом осуществляется с помощью установленного на его носовой части откидного поворотного крыла и в застопоренном состоянии тормоза вращения действуют в качестве несущих поверхностей».
5. Способ формирования управляющих сигналов при самонаведении (RU 2239769 С2, 2002.11.27, 7F41G 7/22), сущность которого «состоит в следующем: разворот антенны головки самонаведения на цель после пропадания сигнала, отраженного от цели, осуществляют с переменной угловой скоростью, пропорциональной текущей оценке углового рассогласования, формируемой интегрированием разности угловой скорости линии визирования, полученной с оптимального фильтра, используемого для формирования команд управления в системе самонаведения, и ее значения, измеренного головкой самонаведения. В качестве оценки угловой скорости может быть также использовано нулевое значение».
6. Инерциальное наведение и система измерения (WO 3085358 А1, 31.03.2003, 7G01C 19/30, B64G 1/28, В64С 17/06) состоят в том, что содержат «гироскоп с управляемым моментом, шарнир карданов, устройство подвески шарнира карданов для возможности вращения шарнира карданов вокруг оси и двигателя шарнира для вращения шарнира вокруг оси для падения вращающего момента. С помощью датчика определяют угловую скорость транспортного средства по величине вращающего момента и углового ускорения шарнира карданов».
7. Система самонаведения для самодвижущегося снаряда (GB 2331352 А1, 07.02/84, 6F41G 7/22, G05D 1/12), которая «снабжена датчиком цели с асимметричным полем обзора. Автопилоты рыскания, тангажа и крена действуют в соответствии с командами, полученными из потребных сигналов ускорения на основе превышения, азимута и угла места. Чтобы держать цель в ограниченном поле обзора, команда угловой скорости по крену включает в себя расчетную составляющую, полученную на основе угловой скорости по тангажу и взятую в обратном масштабе относительно угла азимута. Датчик обеспечивает увеличенный обзор по азимуту и за счет этого может быть несимметрично смещен по азимуту относительно линии прицеливания. После поступления команды, соответствующей большой расчетной угловой скорости по крену, система прекращает движение по рысканию или временно заменяет входные сигналы, поступающие в автопилоты, сигналами управления по линии прицеливания».
8. Блок управления рулями на ракете или снаряде (US 6604705 В2, 19.03.2002, 7F42D 10/06), который «содержит изолированный корпус. На внешней стороне корпуса расположены две управляющие поверхности в форме рулей или полурулей, которые установлены на шарнирах, могут поворачиваться и управляются приводами. Корпус имеет две полости с электродвигателями. Через понижающий зубчатый редуктор двигатели управляют колебаниями относительно продольной оси управляющего узла из двух колец, установленных в гнездах. С кольцами сцеплены при помощи концевых соединителей полурули, которые установлены напротив друг друга на дополнительном кольце. Это кольцо расположено в гнезде корпуса и может свободно поворачиваться относительно продольной оси».
9. Блок рулевого привода управляемого снаряда (RU 2248519 С1, 2003.10.15, 7F42B 15/00), который «включает ось рулей с коромыслом, с которым связаны силовые цилиндры с поршнем мембранного типа с жестким центром и односторонним штоком, а также узлы центровки поршней. Каждый узел центровки в виде центрального стержня постоянного диаметра, установленного в полости цилиндра, и кольцевой направляющей втулки, выполненной на штоке со стороны выхода осевого глухого отверстия, образованного на штоке, образующей со стержнем подвижную посадку. Расстояние от оси рулей до оси каждого цилиндра определяется по определенной зависимости».
10. Блок управляемого привода управляемого снаряда (RU 2248520 С1, 2003.07.02, 7F42B 15/01), в котором «рули соединены посредством полуоси, в которой вдоль продольной оси снаряда выполнено центральное отверстие, перпендикулярно продольной оси выполнены соосные отверстия для установки осей рулей. Полуось содержит элементы соединения с силовыми цилиндрами».
11. Рулевой привод управляемого снаряда (RU 2257534 С1, 2004.03.30, 7F42B 15/00), который «содержит рулевую машину с силовым цилиндром, распределительным устройством и управляющим электромагнитом. Распределительное устройство размещается во входном канале рулевой машины, связанном с полостями силового цилиндра, в котором установлены фильтры и дроссели, на выходе из полости силового цилиндра установлены сопла, перекрываемые заслонкой, связанной с якорем управляющего электромагнита. Площадь дросселя и площадь сопла выполнены при определенном соотношении».
12. Блок рулевого привода управляемого снаряда (RU 2258895 С1, 2004.04.14, 7F42B 15/00), который «содержит шпангоут, рули, рулевую машину со штоком. Рулевая машина жестко закреплена со шпангоутом, на конце штока укреплено водило с отверстием, перпендикулярным оси поршня с размещенным в нем вкладышем. Во вкладыше выполнено отверстие, в котором установлен цилиндрический палец, укрепленный на рычаге, соединенном с рулями».
13. Способ управления ракетой и блок рулевого привода (варианты) (RU 2288439 С1, 2005.07.04, F42B 15/00, 10/60, В64С 13/40), который включает формирование системой управления ракеты сигнала на рулевой привод и соответствующее угловое отклонение аэродинамических рулей приводом относительно продольной оси ракеты в диапазоне между двумя максимальными значениями. В момент достижения аэродинамическими рулями максимального угла отклонения прекращают действие сигнала системы управления на рулевой привод, в котором формируют воздействие, обеспечивающее угловое отклонение аэродинамических рулей в противоположную сторону. В первом варианте блок рулевого привода содержит рулевую машину с закрепленным на оси аэродинамических рулей поршнем в виде коромысла, который установлен в корпусе, разделенном расположенной вдоль оси рулей перегородкой на рабочие камеры, боковые стенки которых имеют сферические поверхности. Общая задняя стенка выполнена с отверстиями, сообщающими рабочие камеры с пневмораспределительным устройством. У задней стенки поднутрением боковых стенок образована промежуточная полость. При этом расстояние от оси вращения аэродинамических рулей до задней стенки и протяженность сферических поверхностей от оси вращения аэродинамических рулей в направлении от задней стенки выполнены величиной, определяемой из первого математического выражения. Во втором варианте блок рулевого привода содержит последовательно соединенные входной сумматор, усилитель, рулевую машину и датчик обратной связи. В него введен ограничитель напряжения положительной и отрицательной величин сигнала датчика обратной связи, два компаратора, аналоговый мультиплексор и формирователь максимальных команд управления».
14. Управляемый снаряд (RU 2295698 С1, 2005.09.20, F42B 15/00), который содержит «в головном отсеке основание, на котором размещен механизм раскрытия рулей. В обтекателе выполнены пазы для выхода рулей. Площадь пазов в обтекателе, являющихся сбросными каналами, выполнена в соотношении 10-15 от площади воздухозаборного устройства».
Следовательно, согласно упомянутой выше задаче, которую необходимо решить, ни один из рассмотренных выше аналогов не может быть принят наиболее близким по технической сущности и назначению в качестве прототипа предлагаемых технических решений (способа, системы и устройств для его осуществления).
Целью заявляемых технических решений (способа, интегрированной системы и устройств для его осуществления) является решение задачи оптимального построения интегрированной комплексированной БССН и на ее основе - интегрированной системы управления и стабилизации подвижного носителя с одновременным обеспечением повышенных его технических характеристик и потребительских свойств.
Сущность изобретения заключается в том, что по предлагаемому способу формируют длиннопериодические управляющие сигналы, пропорциональные скорости  изменения углов визирования, определяющих текущее направление зеркала антенного устройства на заданный OB в горизонтальной и в вертикальной плоскости (фиг.1, фиг.3), а также сигналы, пропорциональные текущим значениям модуля скорости изменения наклонной дальности сближения с заданным OB подвижного носителя, начальным и текущим значениям тангажа и рыскания подвижного носителя. Для этого во время предстартовой подготовки к пуску подвижного носителя системы управления и стабилизации определяют и задают сигналы, пропорциональные начальным координатам L0, εН 0, εГ 0 взаимного положения подвижного носителя и первоначально заданного OB (фиг.4). Затем формируют сигналы в виде пакета последовательных информационных слов. Пакет содержит начальные значения:
изменения углов визирования, определяющих текущее направление зеркала антенного устройства на заданный OB в горизонтальной и в вертикальной плоскости (фиг.1, фиг.3), а также сигналы, пропорциональные текущим значениям модуля скорости изменения наклонной дальности сближения с заданным OB подвижного носителя, начальным и текущим значениям тангажа и рыскания подвижного носителя. Для этого во время предстартовой подготовки к пуску подвижного носителя системы управления и стабилизации определяют и задают сигналы, пропорциональные начальным координатам L0, εН 0, εГ 0 взаимного положения подвижного носителя и первоначально заданного OB (фиг.4). Затем формируют сигналы в виде пакета последовательных информационных слов. Пакет содержит начальные значения:
- пеленгов, т.е. угла наклона εН 0 и азимута εА 0 заданного OB относительно основания антенного устройства, жестко установленного внутри корпуса подвижного носителя, в связанной с центром масс подвижного носителя системе координат Ox1y1z1 (фиг.4);
- наклонной дальности L0 до заданного OB и наклонной скорости  сближения с заданным OB основания антенного устройства вместе с подвижным носителем в предстартовом положении (фиг.1);
сближения с заданным OB основания антенного устройства вместе с подвижным носителем в предстартовом положении (фиг.1);
- рыскания ψ0, тангажа ϑ0 и крена γ0 подвижного носителя вместе с основанием антенного устройства (фиг.5),
а также начальные условия выставки инерциального измерения параметров вектора визирования заданного OB, т.е. сигналы, пропорциональные начальным значениям:
- проекций V0 ζ, V0 η, V0 ξ вектора V линейной скорости предстартового движения основания антенного устройства вместе с подвижным носителем на соответствующие оси местной горизонтальной системы координат Оξηζ (фиг.1, фиг.3);
- декартовых координат ξ0 (D0), η0 (Н0), ζ0 подвижного носителя в местной горизонтальной системе координат (фиг.1);
- долготы λ0 и географической широты φ0 подвижного носителя (фиг.1) и, кроме того, сигналы, пропорциональные необходимым режимным параметрам по дальности, контрольное слово и командное слово.
Далее проверяют сформированные сигналы в виде пакета последовательных информационных слов на отсутствие в них искажений. После этого сигналы, характеризующие пакет последовательных информационных слов, преобразуют в параллельную форму для инерциального измерения параметров вектора визирования заданного OB. Затем на борту подвижного носителя преобразуют сигналы, пропорциональные начальным условиям выставки инерциального измерения параметров вектора визирования заданного OB, в сигналы, пропорциональные начальным значениям:
- проекций V0 x, V0 y, V0 z вектора  линейной скорости предстартового движения основания антенного устройства вместе с подвижным носителем на соответствующие оси базовой антенной системы координат Оxyz (фиг.1, фиг.2),
линейной скорости предстартового движения основания антенного устройства вместе с подвижным носителем на соответствующие оси базовой антенной системы координат Оxyz (фиг.1, фиг.2),
- углов εГ 0 и εВ 0 визирования заданного OB соответственно в горизонтальной и в вертикальной плоскости в местной горизонтальной системе координат Оζηξ (фиг.1, фиг.3),
- составляющие e0 1 и е0 2 пространственной угловой координаты  заданного OB в базовой антенной системе координат Оxyz, т.е. сигналов рассогласования (ошибки) между направлением оптической оси зеркала антенного устройства и направлением вектора (линии) визирования на заданный OB, отсчитываемых в базовой антенной системе координат относительно оптической оси зеркала антенного устройства во взаимно перпендикулярных плоскостях пеленгования OB (фиг.2),
заданного OB в базовой антенной системе координат Оxyz, т.е. сигналов рассогласования (ошибки) между направлением оптической оси зеркала антенного устройства и направлением вектора (линии) визирования на заданный OB, отсчитываемых в базовой антенной системе координат относительно оптической оси зеркала антенного устройства во взаимно перпендикулярных плоскостях пеленгования OB (фиг.2),
- направляющих косинусов β0 ij (где i, j=1, 2, 3), определяющих начальное взаимное положение базовой антенной системы координат Оxyz и опорной геоцентрической системы координат Сξ0η0ζ0, связанной одной своей осью Сζ0 с заданным OB, расположенным на земной поверхности (фиг.1).
В момент старта подвижного носителя обновление сигналов начальной информации прекращается, а во время его движения по траектории после старта измеряют сигналы, пропорциональные проекциям nx, ny nz вектора  кажущегося линейного ускорения движения и проекциям ωx, ωy, ωz вектора
кажущегося линейного ускорения движения и проекциям ωx, ωy, ωz вектора  абсолютной угловой скорости поворота зеркала антенного устройства на соответствующие оси системы координат Охзyзzз, связанной с зеркалом антенного устройства. По этим измеренным сигналам с учетом переменной электрической редукции между углами поворота зеркала антенного устройства и линии и/или вектора визирования заданного OB определяют сигналы, пропорциональные проекциям nx, ny, nz вектора
абсолютной угловой скорости поворота зеркала антенного устройства на соответствующие оси системы координат Охзyзzз, связанной с зеркалом антенного устройства. По этим измеренным сигналам с учетом переменной электрической редукции между углами поворота зеркала антенного устройства и линии и/или вектора визирования заданного OB определяют сигналы, пропорциональные проекциям nx, ny, nz вектора  кажущегося линейного ускорения движения и проекциям ωх, ωy, ωz вектора абсолютной угловой скорости поворота вектора визирования заданного OB на соответствующие оси базовой антенной системы координат Oxyz. По полученным сигналам формируют с учетом сигналов, определенных и заданных во время предстартовой подготовки подвижного носителя, сигналы, пропорциональные текущим значениям параметров вектора визирования заданного OB, а именно:
кажущегося линейного ускорения движения и проекциям ωх, ωy, ωz вектора абсолютной угловой скорости поворота вектора визирования заданного OB на соответствующие оси базовой антенной системы координат Oxyz. По полученным сигналам формируют с учетом сигналов, определенных и заданных во время предстартовой подготовки подвижного носителя, сигналы, пропорциональные текущим значениям параметров вектора визирования заданного OB, а именно:
- проекций Vx, Vy, Vz вектора линейной скорости сближения с заданным OB основания антенного устройства вместе с подвижным носителем на соответствующие оси базовой антенной системы координат,
- наклонной дальности L и наклонной скорости  сближения с заданным OB основания антенного устройства вместе с подвижным носителем,
сближения с заданным OB основания антенного устройства вместе с подвижным носителем,
- составляющих e1 и e2 пространственной угловой координаты заданного OB в базовой антенной системе координат Оxyz,
- направляющих косинусов βij (где i, j=1, 2, 3) взаимного текущего углового положения базовой антенной системы координат Oxyz и опорной геоцентрической системы координат Сξоηоζо.
По этим сформированным сигналам, пропорциональным текущим значениям наклонной дальности L и наклонной скорости  сближения с заданным OB основания антенного устройства вместе с подвижным носителем, осуществляют инерциальное автосопровождение заданного OB по дальности, а по полученным сигналам, пропорциональным текущим значениям составляющих е1 и е2 пространственной угловой координаты
сближения с заданным OB основания антенного устройства вместе с подвижным носителем, осуществляют инерциальное автосопровождение заданного OB по дальности, а по полученным сигналам, пропорциональным текущим значениям составляющих е1 и е2 пространственной угловой координаты  заданного OB в базовой системе координат Oxyz, которые являются сигналами рассогласования между направлением оптической оси зеркала антенного устройства и направлением на заданный OB в двух соответственно взаимно перпендикулярных плоскостях пеленгования в базовой антенной системе координат, одновременно осуществляют инерциальное автосопровождение по направлению заданного OB, назначенного при предстартовой подготовке подвижного носителя. Для этого преобразуют путем интегрирования в замкнутом контуре инерциального автосопровождения по направлению заданного OB полученные сигналы, пропорциональные текущим значениям составляющих e1 и е2 пространственной угловой координаты заданного OB, в управляющие длиннопериодические сигналы, пропорциональные соответственно скорости изменения углов визирования заданного OB
заданного OB в базовой системе координат Oxyz, которые являются сигналами рассогласования между направлением оптической оси зеркала антенного устройства и направлением на заданный OB в двух соответственно взаимно перпендикулярных плоскостях пеленгования в базовой антенной системе координат, одновременно осуществляют инерциальное автосопровождение по направлению заданного OB, назначенного при предстартовой подготовке подвижного носителя. Для этого преобразуют путем интегрирования в замкнутом контуре инерциального автосопровождения по направлению заданного OB полученные сигналы, пропорциональные текущим значениям составляющих e1 и е2 пространственной угловой координаты заданного OB, в управляющие длиннопериодические сигналы, пропорциональные соответственно скорости изменения углов визирования заданного OB  и
и  , определяющие текущее направление зеркала антенного устройства на заданный OB в вертикальной и в горизонтальной плоскости, обусловленные движением основания антенного устройства вместе с подвижным носителем по направлению к заданному OB.
, определяющие текущее направление зеркала антенного устройства на заданный OB в вертикальной и в горизонтальной плоскости, обусловленные движением основания антенного устройства вместе с подвижным носителем по направлению к заданному OB.
Этими длиннопериодическими сигналами воздействуют на соответствующие датчики момента управляемого трехстепенного гироскопа, установленного во внутренней рамке двухосного карданова подвеса антенного устройства, наружная и внутренняя рамки которого шарнирно связаны с его зеркалом (фиг.6, фиг.7).
Под действием длиннопериодических сигналов создаются длиннопериодические возмущающие управляющие моменты, вызывающие моменты гироскопической реакции в опорах осей прецессии соответствующих рамок трехосного карданова подвеса ротора гироскопа. При этом согласно прецессионной теории гироскопа возникает длиннопериодическое прецессионное отклонение соответствующих рамок трехосного карданова подвеса ротора гироскопа с угловой скоростью, близкой по величине к угловой скорости  и
и  изменения соответствующих углов визирования заданного OB. Одновременно определяют сигналы, пропорциональные рассогласованию между направлением вектора
изменения соответствующих углов визирования заданного OB. Одновременно определяют сигналы, пропорциональные рассогласованию между направлением вектора  кинетического момента ротора гироскопа и направлением на OB, задаваемым сформированными длиннопериодическими сигналами, пропорциональными соответственно скорости
кинетического момента ротора гироскопа и направлением на OB, задаваемым сформированными длиннопериодическими сигналами, пропорциональными соответственно скорости  и изменения углов визирования заданного OB в горизонтальной и в вертикальной плоскости и соответственно длиннопериодическим возмущающим управляющим моментам.
и изменения углов визирования заданного OB в горизонтальной и в вертикальной плоскости и соответственно длиннопериодическим возмущающим управляющим моментам.
Эти сигналы преобразуют в длиннопериодические сигналы управления электродвигателями поворота рамок двухосного карданова подвеса антенного устройства. По сигналам управления электродвигатели развивают длиннопериодические поворотные моменты, равные и совпадающие по направлению с направлением соответствующих длиннопериодических возмущающих управляющих моментов, для поворота наружной и внутренней рамок двухосного карданова подвеса антенного устройства и шарнирно связанного с ним зеркала в текущее направление на заданный OB. При этом одновременно определяют сигналы, пропорциональные соответственно углу наклона εн з и азимуту εA з заданного OB относительно основания антенного устройства, которое установлено жестко внутри корпуса подвижного носителя.
При круговом вращении основания антенного устройства вместе с вращающимся по крену подвижным носителем также одновременно формируют сигналы, пропорциональные соответственно углу наклона εн з и азимуту εА з заданного OB относительно основания антенного устройства, характеризующиеся амплитудой и частотой короткопериодических колебаний, сдвинутых по фазе на 90 градусов, соответственно наружной и внутренней рамок двухосного карданова подвеса антенного устройства и шарнирно связанного с ним зеркала относительно своих осей вращения. Кроме того, одновременно также формируют короткопериодические сигналы, пропорциональные колебаниям основания антенного устройства вместе с короткопериодическими колебаниями подвижного носителя по рысканию ψ и по тангажу ϑ, которые воздействуют на основание антенного устройства при одновременном его вращении по крену γ вместе с подвижным носителем.
Вследствие этого возникают аддитивные короткопериодические возмущающие моменты, которые, в свою очередь, вызывают короткопериодические моменты гироскопической реакции в опорах осей прецессии соответствующих рамок трехосного карданова подвеса ротора гироскопа. При этом согласно прецессионной теории гироскопа возникает короткопериодическое прецессионное колебание соответствующих рамок карданова подвеса ротора гироскопа с угловыми скоростями, направление вектора которых совпадает с направлением векторов аддитивных короткопериодических возмущающих моментов.
Одновременно определяют сигналы, пропорциональные рассогласованию между направлением вектора  кинетического момента ротора гироскопа и направлением вектора аддитивных короткопериодических возмущающих моментов. Эти сигналы преобразуют в аддитивные короткопериодические сигналы управления соответствующих электродвигателей поворота рамок двухосного карданова подвеса антенного устройства.
кинетического момента ротора гироскопа и направлением вектора аддитивных короткопериодических возмущающих моментов. Эти сигналы преобразуют в аддитивные короткопериодические сигналы управления соответствующих электродвигателей поворота рамок двухосного карданова подвеса антенного устройства.
По сигналам управления электродвигатели развивают аддитивные короткопериодические поворотные моменты, равные и противоположно направленные соответственно направлению аддитивных короткопериодических возмущающих моментов, действующих вокруг соответствующих осей вращения наружной и внутренней рамок двухосного карданова подвеса антенного устройства, для отработки аддитивных короткопериодических сигналов, обусловленных вращением основания антенного устройства вместе с вращающимся по крену γ подвижным носителем и их колебаниями по тангажу ϑ и по рысканию ψ в заданном текущем направлении на заданный OB с одновременной отработкой сигналов, пропорциональных угловой скорости короткопериодических отклонений рамок двухосного карданова подвеса антенного устройства. При этом отработанные аддитивные короткопериодические сигналы регистрируют и по этим короткопериодическим сигналам, характеризующимся амплитудой и частотой короткопериодических колебаний рамок двухосного карданова подвеса антенного устройства, определяют сигнал, пропорциональный периоду колебаний рамок двухосного карданова подвеса антенного устройства. По этому сигналу в течение всего времени вращения по крену подвижного носителя антенного устройства определяют сигнал, пропорциональный угловой скорости вращения по крену подвижного носителя. Одновременно также формируют при необходимости по зарегистрированным сигналам короткопериодические сигналы торможения вращения подвижного носителя по крену γ, сдвинутые по фазе на 90 градусов. Эти сигналы преобразуют в электрические сигналы торможения и одновременно подают на входы приводов соответствующих четырех дифференциальных аэродинамических рулей (АДР), осуществляющих управление подвижным носителем относительно его двух взаимно перпендикулярных осей симметрии. АДР по этим сигналам развивают короткопериодические вращающие моменты торможения, равные и противоположно направленные соответственно действующим аддитивным короткопериодическим возмущающим моментам, обусловленным вращением по крену γ подвижного носителя антенного устройства. При торможении вращения по крену подвижного носителя, когда сигнал, пропорциональный периоду короткопериодических колебаний рамок двухосного карданова подвеса антенного устройства, превышает пороговое значение периода, соответствующее величине угловой скорости вращения по крену у подвижного носителя, близкой к нулю, определяют сигнал остановки вращения по крену подвижного носителя. При этом одновременно определяют сигналы, пропорциональные углу наклона εн и азимуту εA заданного OB. После остановки вращения по крену γ подвижного носителя одновременно осуществляют стабилизацию текущего направления зеркала антенного устройства на заданный OB от действующих короткопериодических колебаний подвижного носителя относительно своего центра масс по крену γ, по тангажу ϑ и по рысканию ψ. При этом по сформированным управляющим длиннопериодическим сигналам, пропорциональным скорости и изменения углов визирования, определяют стабилизированное от аддитивных короткопериодических колебаний текущее направление зеркала антенного устройства на заданный OB в горизонтальной и в вертикальной плоскости и осуществляют инерциальное управление стабилизированным направлением зеркала антенного устройства на заданный OB также и при круговом вращении основания антенного устройства вместе с вращающимся по крену подвижным носителем.
При перемещении по траектории после старта подвижного носителя по сигналам, пропорциональным полученным проекциям ωх, ωy, ωz вектора  абсолютной угловой скорости поворота вектора визирования заданного OB на соответствующие оси базовой антенной системы координат Oxyz, формируют сигналы, пропорциональные проекциям
абсолютной угловой скорости поворота вектора визирования заданного OB на соответствующие оси базовой антенной системы координат Oxyz, формируют сигналы, пропорциональные проекциям  ,
,  ,
,  вектора
вектора  абсолютной угловой скорости поворота вектора визирования заданного OB на соответствующие оси системы координат Ox1y1z1, связанной с осями симметрии подвижного носителя (фиг.5). Затем по этим сигналам формируют сигналы, пропорциональные проекциям
абсолютной угловой скорости поворота вектора визирования заданного OB на соответствующие оси системы координат Ox1y1z1, связанной с осями симметрии подвижного носителя (фиг.5). Затем по этим сигналам формируют сигналы, пропорциональные проекциям  ,
,  ,
,  вектора
вектора  углового ускорения поворота вектора визирования заданного OB на соответствующие оси связанной системы координат Ox1y1z1, а также с учетом начальных знаний крена γ0, тангажа ϑ0 и рыскания ψ0, заданных при предстартовой подготовке подвижного носителя к пуску, определяют короткопериодические сигналы, пропорциональные текущим значениям крена γ, тангажа ϑ, рыскания ψ и соответственно угловой скорости
углового ускорения поворота вектора визирования заданного OB на соответствующие оси связанной системы координат Ox1y1z1, а также с учетом начальных знаний крена γ0, тангажа ϑ0 и рыскания ψ0, заданных при предстартовой подготовке подвижного носителя к пуску, определяют короткопериодические сигналы, пропорциональные текущим значениям крена γ, тангажа ϑ, рыскания ψ и соответственно угловой скорости  ,
,  ,
,  их изменения.
их изменения.
Далее по полученным сигналам формируют короткопериодические сигналы стабилизации подвижного носителя в вертикальной плоскости, в горизонтальной плоскости и крену γ. По этим сигналам формируют короткопериодические сигналы, пропорциональные стабилизирующим моментам, которые поступают на вход соответственно каждого широкополосного контура управления соответствующих четырех приводов дифференциальных АДР подвижного носителя. Кроме того, одновременно по сигналам, пропорциональным полученным измеренным проекциям nx, ny, nz вектора  кажущегося ускорения движения вектора визирования заданного OB на соответствующие оси базовой антенной системы координат Oxyz, формируют сигналы, пропорциональные проекциям nξ, nη, nζ вектора
кажущегося ускорения движения вектора визирования заданного OB на соответствующие оси базовой антенной системы координат Oxyz, формируют сигналы, пропорциональные проекциям nξ, nη, nζ вектора  кажущегося линейного ускорения движения вектора визирования заданного OB на соответствующие оси местной горизонтальной системы координат Оξηζ (фиг.1).
кажущегося линейного ускорения движения вектора визирования заданного OB на соответствующие оси местной горизонтальной системы координат Оξηζ (фиг.1).
По полученным сигналам, пропорциональным текущим значениям модуля вектора скорости  изменения наклонной дальности сближения с заданным OB основания антенного устройства вместе с подвижным носителем, скорости
изменения наклонной дальности сближения с заданным OB основания антенного устройства вместе с подвижным носителем, скорости  и
и  изменения углов визирования заданного OB соответственно в горизонтальной и в вертикальной плоскости, а также начальным и текущим значениями горизонтального угла визирования εг 0 и εг и вертикального угла визирования εв 0 и εв заданного OB, формируют управляющие сигналы автономного самонаведения подвижного носителя вместе с основанием антенного устройства на заданный OB, пропорциональные заданным перегрузкам nг зад и nв зад соответственно в горизонтальной и вертикальной плоскости.
изменения углов визирования заданного OB соответственно в горизонтальной и в вертикальной плоскости, а также начальным и текущим значениями горизонтального угла визирования εг 0 и εг и вертикального угла визирования εв 0 и εв заданного OB, формируют управляющие сигналы автономного самонаведения подвижного носителя вместе с основанием антенного устройства на заданный OB, пропорциональные заданным перегрузкам nг зад и nв зад соответственно в горизонтальной и вертикальной плоскости.
Затем полученные сигналы, пропорциональные задаваемым перегрузкам nг зад и гв зад, сравнивают соответственно с сформированными сигналами, пропорциональными вертикальной nη и горизонтальной nζ проекциям вектора кажущегося ускорения движения подвижного носителя на соответствующие оси местной горизонтальной системы координат Оξηζ. Далее полученные сигналы преобразуют в управляющие длиннопериодические сигналы, которые поступают на вход узкополосных контуров управления соответствующих четырех приводов дифференциальных АДР подвижного носителя, где их суммируют соответственно со сформированными короткопериодическими сигналами, пропорциональными стабилизирующим моментам. Полученные сигналы преобразуют в электрические сигналы управления и стабилизации подвижного носителя. Затем их усиливают по мощности для управления соответственно четырьмя дифференциальными АДР подвижного носителя для отработки этих сигналов. При этом формируют массив сигналов обратной связи, которые вычитают из суммы массивов сформированных короткопериодических сигналов, пропорциональных стабилизирующим моментам, и соответственно сигналов, полученных сравнением сигналов, пропорциональных задаваемым перегрузкам в вертикальной nв зад и в горизонтальной nг зад плоскости, соответственно с сигналами, пропорциональными вертикальной nη и горизонтальной nζ проекциям вектора кажущегося ускорения движения подвижного носителя на соответствующие оси местной горизонтальной системы координат Oξηζ.
Сущность изобретения заключается также и в том, что интегрированная система, осуществляющая способ, характеризуется тем, что включает в свой состав интегрированную бортовую систему самонаведения (БССН) и систему управления приводами четырех дифференциальных АДР подвижного носителя. БССН содержит антенное устройство и цифровое вычислительное устройство. При этом антенное устройство включает в свой состав зеркало с облучателем и волноводно-коммутирующим устройством (ВКУ), двухосный карданов подвес, ось вращения наружной рамки которого установлена на основании антенного устройства, а ось вращения внутренней рамки установлена в наружной рамке перпендикулярно к ее оси вращения, электродвигатель поворота наружной рамки двухосного карданова подвеса и электродвигатель поворота внутренней рамки двухосного карданова подвеса, датчик угла поворота наружной рамки двухосного подвеса, датчик угла поворота внутренней рамки двухосного карданова подвеса соответственно по углу наклона и по азимуту, а также управляемый трехстепенной гироскоп, гироскопический двухканальный датчик угловой скорости (ДУС), три однокомпонентных измерителя линейного ускорения. Причем управляемый трехстепенной гироскоп установлен во внутренней рамке двухосного карданова подвеса антенного устройства так, что направление вектора кинетического момента  его ротора в заарретированном положении гироскопа совпадает с нулевым направлением линии визирования антенного устройства.
его ротора в заарретированном положении гироскопа совпадает с нулевым направлением линии визирования антенного устройства.
Гироскоп содержит трехосный карданов подвес ротора, датчик угла прецессии внутренней рамки трехосного карданова подвеса ротора и датчик угла прецессии наружной рамки трехосного карданова подвеса ротора гироскопа, датчик момента управления направлением поворота внутренней рамки трехосного карданова подвеса ротора гироскопа, датчик момента управления направлением поворота наружной рамки трехосного карданова подвеса ротора гироскопа. При этом ось собственного вращения ротора гироскопа установлена во внутренней рамке трехосного карданова подвеса ротора гироскопа, ось вращения которой установлена в наружной рамке трехосного карданова подвеса ротора гироскопа, ось вращения которой, в свою очередь, установлена в корпусе (кожухе) гироскопа, а корпус гироскопа жестко закреплен во внутренней рамке двухосного карданова подвеса антенного устройства. На соответствующих осях рамок трехосного карданова подвеса ротора установлены соответственно датчики угла прецессии внутренней и наружной рамки трехосного карданова подвеса ротора гироскопа. Антенное устройство также включает в свой состав узел гиростабилизации и управления направлением зеркала антенного устройства на OB (неподвижный или подвижный) по углу наклона, узел гиростабилизации и управления направлением зеркала антенного устройства на OB по азимуту, а также усилители сигналов обратной связи в соответствующих каналах двухканального гироскопического ДУС - измерителя составляющих вектора абсолютной угловой скорости поворота зеркала антенного устройства. Двухканальный гироскопический ДУС установлен во внутренней рамке двухосного карданова подвеса антенного устройства так, что в заарретированном положении одна из его осей чувствительности совпадает с нулевым направлением линии визирования антенного устройства, а другая его ось чувствительности ориентирована, например, вверх вдоль положительного направления оси вращения внутренней рамки двухосного карданова подвеса антенного устройства. При этом направление вектора кинетического момента ротора гироскопического ДУС совпадает с положительным направлением оси вращения наружной рамки двухосного карданова подвеса антенного устройства. Все три однокомпонентных измерителя линейного ускорения установлены во внутренней рамке двухосного карданова подвеса антенного устройства так, что ось чувствительности одного из них взаимно ортогональна по отношению к взаимно ортогональным осям чувствительности двух других однокомпонентных измерителей линейного ускорения. При этом ось чувствительности одного из трех однокомпонентных измерителей линейного ускорения совпадает в заарретированном положении с нулевым положением линии визирования антенного устройства.
Выходы соответствующих датчиков угла прецессии внутренней рамки и наружной рамки трехосного карданова подвеса ротора управляемого трехстепенного гироскопа соответственно соединены с входом узлов гиростабилизации и управления направлением зеркала антенного устройства на заданный OB по углу наклона и по азимуту.
Выходы узлов гиростабилизации и управления направлением зеркала антенного устройства на заданный OB по углу наклона и по азимуту соединены соответственно с электродвигателями поворота наружной рамки и внутренней рамки двухосного карданова подвеса антенного устройства. Причем выходы датчиков угла прецессии внутренней и наружной рамок трехосного карданова подвеса ротора гироскопического ДУС соединены соответственно с входом усилителей сигналов отрицательной обратной связи. Выходы этих усилителей соединены соответственно с датчиками момента внутренней и наружной рамок гироскопического ДУС.
Зеркало антенного устройства выполнено с возможностью поворота в двух взаимно перпендикулярных плоскостях с помощью двухстепенного шарнира относительно центра излучения облучателя, жестко закрепленного на основании антенного устройства. При этом зеркало шарнирно соединено тягами механического координатора антенного устройства соответственно с наружной рамкой и с внутренней рамкой двухосного карданова подвеса антенного устройства так, что расстояние между каждым из шарниров тяг на задней поверхности зеркала и его центром вращения равно расстоянию между каждым из шарниров, установленных соответственно на наружной рамке и на внутренней рамке двухосного карданова подвеса антенного устройства, и центром вращения этих рамок.
Антенное устройство включает в свой состав также узел формирования управляющего сигнала, пропорционального задаваемой угловой скорости поворота зеркала в вертикальной плоскости, и узел формирования управляющего сигнала, пропорционального задаваемой угловой скорости поворота зеркала в горизонтальной плоскости, а также узел масштабирования сигнала, снимаемого с выхода узла формирования управляющего сигнала задаваемой угловой скорости поворота зеркала в вертикальной плоскости, соединенного с входом датчика момента управления направлением поворота наружной рамки трехосного карданова подвеса ротора гироскопа. Причем сигнал, снимаемый с выхода узла масштабирования сигнала с выхода узла формирования управляющего сигнала задаваемой угловой скорости поворота зеркала в вертикальной плоскости, пропорционален проекции ωz вектора  абсолютной угловой скорости поворота зеркала антенного устройства на ось Oz базовой антенной системы координат Oxyz. Выход узла формирования управляющего сигнала, пропорционального задаваемой угловой скорости поворота зеркала в горизонтальной плоскости, соединен с входом датчика момента управления направлением поворота внутренней рамки трехосного карданова подвеса ротора гироскопа. При этом выходы трех однокомпонентных измерителей соответствующих проекций кажущегося линейного ускорения соединены соответственно с первым, вторым и третьим входами ЦВУ. Выходы двухканального гироскопического ДУС и выход узла масштабирования сигнала с выхода узла формирования управляющего сигнала задаваемой угловой скорости поворота зеркала антенного устройства в вертикальной плоскости соединены соответственно с четвертым, пятым и шестым входами ЦВУ.
абсолютной угловой скорости поворота зеркала антенного устройства на ось Oz базовой антенной системы координат Oxyz. Выход узла формирования управляющего сигнала, пропорционального задаваемой угловой скорости поворота зеркала в горизонтальной плоскости, соединен с входом датчика момента управления направлением поворота внутренней рамки трехосного карданова подвеса ротора гироскопа. При этом выходы трех однокомпонентных измерителей соответствующих проекций кажущегося линейного ускорения соединены соответственно с первым, вторым и третьим входами ЦВУ. Выходы двухканального гироскопического ДУС и выход узла масштабирования сигнала с выхода узла формирования управляющего сигнала задаваемой угловой скорости поворота зеркала антенного устройства в вертикальной плоскости соединены соответственно с четвертым, пятым и шестым входами ЦВУ.
Выход датчика угла поворота наружной рамки и выход датчика угла поворота внутренней рамки двухосного карданова подвеса антенного устройства соответственно по углу наклона и по азимуту соединены с седьмым входом и с восьмым входом ЦВУ соответственно, первый и второй выход которого соединен соответственно с входом узла формирования управляющего сигнала, пропорционального задаваемой угловой скорости поворота зеркала антенного устройства в вертикальной плоскости, и с входом узла формирования управляющего сигнала, пропорционального задаваемой угловой скорости поворота зеркала антенного устройства в горизонтальной плоскости. Кроме того, информационная линия связи соединяет аппаратуру подготовки и управления пуском подвижного носителя, внешнюю по отношению к заявляемой системе, с информационным девятым входом ЦВУ интегрированной БССН, информационный третий выход которого соединен информационной линией связи с информационным первым входом системы управления четырьмя дифференциальными АДР подвижного носителя.
При этом система управления четырьмя дифференциальными АДР подвижного носителя содержит узел формирования массива сигналов управления и стабилизации подвижного носителя, узел формирования сигналов дифференциального управления четырьмя электродвигателями соответствующих дифференциальных АДР подвижного носителя, четыре датчика сигнала отрицательной обратной связи, узел формирования массива сигналов отрицательной обратной связи. Причем информационный вход узла формирования массива сигналов управления и стабилизации подвижного носителя соединен информационной линией связи с информационным третьим выходом ЦВУ. Информационный выход узла формирования массива сигналов управления и стабилизации подвижного носителя соединен информационной линией связи с информационным входом узла формирования сигналов дифференциального управления четырьмя электродвигателями соответствующих дифференциальных АДР подвижного носителя. Выходы каждого из четырех датчиков сигнала отрицательной обратной связи соединены соответственно с первым, вторым, третьим, четвертым входом узла формирования массива сигналов отрицательной обратной связи, информационный выход которого соединен информационной линией связи с информационным (десятым) входом ЦВУ.
Сущность изобретения состоит в том, что устройство приведения зеркала антенны в поворотное движение в двух взаимно перпендикулярных плоскостях для осуществления способа характеризуется тем, что оно конструктивно выполнено в виде единого модуля, вмонтированного в оболочку подвижного носителя, и содержит антенное устройство, основание которого жестко установлено внутри модуля. При этом антенное устройство включает в свой состав двухосный карданов подвес, ось вращения наружной рамки которого установлена на шарикоподшипниковых опорах на основании антенного устройства, а ось вращения внутренней рамки которого установлена на шарикоподшипниковых опорах в наружной рамке.
С одной стороны наружной рамки установлен конструктивно встроенный электродвигатель, а с другой стороны наружной рамки соосно установлен конструктивно встроенный датчик угла поворота наружной рамки так, что их роторы соответственно жестко закреплены на оси вращения наружной рамки, а их статоры соответственно жестко закреплены в основании антенного устройства.
При этом с одной стороны внутренней рамки установлен также конструктивно встроенный электродвигатель, а с другой стороны внутренней рамки соосно установлен конструктивно встроенный датчик угла поворота внутренней рамки так, что их роторы соответственно жестко закреплены на оси вращения внутренней рамки, а их статоры соответственно жестко закреплены в наружной рамке двухосного карданова подвеса антенного устройства.
Во внутренней рамке двухосного карданова подвеса антенного устройства размещены управляемый трехстепенной гироскоп, двухканальный гироскопический ДУС и три однокомпонентных измерителя соответствующих проекций кажущегося линейного ускорения.
На основании антенного устройства установлены электронные узлы гиростабилизации и управления направлением зеркала антенного устройства по углу наклона и по азимуту соответственно.
При этом для обеспечения приведения зеркала в поворотное движение по углу наклона и по азимуту антенное устройство также содержит двухстепенной шарнир, создающий возможность поворота зеркала в двух взаимно перпендикулярных плоскостях относительно облучателя, жестко закрепленного на основании антенного устройства, две тяги механического координатора антенного устройства, кулису, два шарнира Гука для механического соединения кулисы двумя тягами соответственно с двумя шарнирами Гука, установленными на задней поверхности зеркала антенного устройства. Причем на входы электронных узлов гиростабилизации и управления направлением зеркала антенного устройства поступают сигналы с соответствующих выходов управляемого трехстепенного гироскопа. С выхода этих электронных узлов сигналы поступают на соответствующие конструктивно встроенные электродвигатели для поворота соответственно наружной рамки по углу наклона и поворота внутренней рамки по азимуту двухосного карданова подвеса.
Сигналы с выходов двух ММГ и с выходов трех ММА, с выходов датчика угла поворота наружной рамки по углу наклона и внутренней рамки по азимуту поступают на соответствующие входы ЦВУ БССН, внешнего по отношению к устройству приведения зеркала антенны в поворотное движение в двух взаимно перпендикулярных плоскостях.
На входы управляемого трехстепенного гироскопа через узел формирования управляющего сигнала задаваемой угловой скорости поворота зеркала в вертикальной плоскости и соответственно через узел формирования управляющего сигнала задаваемой угловой скорости поворота зеркала в горизонтальной плоскости поступают с первого и второго соответственно выходов ЦВУ сигналы управления направлением зеркала антенного устройства.
Сущность изобретения состоит, кроме того, и в том, что устройство приведения в действие дифференциальных АДР подвижного носителя для осуществления способа характеризуется тем, что содержит четыре независимых идентичных привода соответствующих дифференциальных АДР. При этом каждый привод конструктивно выполнен в виде единого модуля, жестко вмонтированного в оболочку подвижного носителя. Четыре дифференциальных АДР расположены попарно крестообразно на поверхности оболочки подвижного носителя соосно двухосному карданову подвесу устройства приведения зеркала антенного устройства в поворотное движение в двух взаимно перпендикулярных плоскостях и жестко связаны с соответствующими валами каждого привода. Каждый из четырех валов вращается на шарикоподшипниковых опорах в корпусе каждого привода. Причем одна пара противоположно расположенных соосно относительно центра вращения дифференциальных АДР валов направлена вдоль по оси, перпендикулярной к оси, вдоль по которой направлена другая пара противоположно расположенных соосно валов. При этом внутри корпуса каждого привода на соответствующем валу соосно установлены соответственно встроенные электродвигатели и встроенные датчики сигнала отрицательной обратной связи так, что ротор каждого из встроенных электродвигателей и ротор каждого из встроенных датчиков сигнала отрицательной обратной связи жестко закреплены на соответствующих валах каждого привода. Статор каждого из встроенных электродвигателей и статор каждого из встроенных датчиков сигнала отрицательной обратной связи жестко установлены соответственно в корпусе каждого привода дифференциальных АДР. Причем каждый из четырех встроенных электродвигателей приводов дифференциальных АДР через узел формирования сигналов управления четырьмя электродвигателями и каждый из четырех датчиков сигнала отрицательной обратной связи через узел формирования массива сигналов отрицательной обратной связи электрически соединены информационными линиями с ЦВУ БССН, внешним по отношению к заявленному устройству приведения в действие дифференциальных АДР подвижного носителя.
Введение указанных признаков в способ, систему и устройства для его осуществления обеспечивает управление и стабилизацию подвижного носителя, перемещающегося по заданной траектории, а также подвижного носителя, при этом одновременно вращающегося по крену, вследствие возможности формирования:
- по сигналам, пропорциональным текущим значениям параметров вектора визирования OB, сигналов nг зад и nв зад автономного самонаведения на заданный OB и сигналов стабилизации δг зад, δв зад, δк зад подвижного носителя от аддитивных короткопериодических колебаний относительно своего центра масс в горизонтальной плоскости, в вертикальной плоскости и по крену γ;
- единого на всей траектории перемещения подвижного носителя закона пропорционального самонаведения вследствие возможности определения;
- длиннопериодических управляющих сигналов, пропорциональных текущим значениям скорости  изменения углов визирования заданного OB в горизонтальной и в вертикальной плоскости;
изменения углов визирования заданного OB в горизонтальной и в вертикальной плоскости;
- сигналов, пропорциональных текущим значениям параметров вектора  визирования заданного OB, а именно наклонной дальности L и наклонной скорости
визирования заданного OB, а именно наклонной дальности L и наклонной скорости  сближения с заданным OB.
сближения с заданным OB.
Кроме того, введение указанных признаков в способ, систему и устройства для его осуществления обеспечивает высокоточное самонаведение подвижного носителя на заданный OB при одновременном решении задачи оптимального построения интегрированной системы управления и стабилизации подвижного носителя, оптимальной компоновки и конструкции ее составных частей в ограниченном объеме размещения в носовой части головного отсека подвижного носителя.
Из уровня техники не выявлены решения, имеющие признаки, совпадающие с отличительными признаками предлагаемых технических решений задачи управления и стабилизации подвижного носителя, построения интегрированной системы управления и стабилизации подвижного носителя, конструкторских решений устройства приведения зеркала антенны в поворотное движение в двух взаимно перпендикулярных плоскостях и устройства приведения в действие дифференциальных аэродинамических рулей подвижного носителя.
Поэтому предложенные технические решения соответствуют условию изобретательского уровня.
Сущность изобретения поясняется чертежами, где представлены:
- на фиг.1 - принятые системы координат;
- на фиг.2 - положение вектора  визирования ТП в базовой антенной системе координат Oxyz;
визирования ТП в базовой антенной системе координат Oxyz;
- на фиг.3 - взаимное положение базовой антенной системы координат Oxyz и местной горизонтальной системы координат Оξηζ;
- на фиг.4 - взаимное положение базовой антенной системы координат Oxyz и связанной системы координат Ox1, y1, z1;
- на фиг.5 - взаимное положение связанной с подвижным носителем системы координат Ox1y1z1 и местной горизонтальной системы координат Oξηζ;
- на фиг.6 - функционально-структурная схема предлагаемой интегрированной системы управления и стабилизации подвижного носителя;
- на фиг.7 - принципиальная кинематическая схема устройства приведения зеркала антенны в поворотное движение в двух взаимно перпендикулярных плоскостях;
- на фиг.8 - устройство приведения зеркала антенны в поворотное движение в двух взаимно перпендикулярных плоскостях;
- на фиг.9 - механический координатор устройства приведения зеркала антенны в поворотное движение в двух взаимно перпендикулярных плоскостях;
- на фиг.10 - устройство приведения в действие дифференциальных аэродинамических рулей подвижного носителя.
Предлагаемый способ характеризуется тем, что для обеспечения управления и стабилизации подвижного носителя формируют длиннопериодические управляющие сигналы, пропорциональные задаваемым перегрузкам nг зад и nв зад соответственно в горизонтальной и в вертикальной плоскости, и задаваемые короткопериодические сигналы δг зад, δв зад, δк зад, пропорциональные в общем случае проекциям 
 вектора
вектора  абсолютной угловой скорости подвижного носителя на оси связанной системы координат Ox1y1z1 (фиг.5), проекциям
абсолютной угловой скорости подвижного носителя на оси связанной системы координат Ox1y1z1 (фиг.5), проекциям 

 вектора
вектора  абсолютного углового ускорения подвижного носителя на оси связанной системы координат Ox1y1z1 (фиг.5), рысканию ψ, тангажу ϑ и крену γ подвижного носителя и скорости , , их изменения (фиг.5).
абсолютного углового ускорения подвижного носителя на оси связанной системы координат Ox1y1z1 (фиг.5), рысканию ψ, тангажу ϑ и крену γ подвижного носителя и скорости , , их изменения (фиг.5).
По предлагаемому способу, следовательно, формируют длиннопериодические управляющие сигналы, пропорциональные скорости и в изменения углов визирования, определяющих текущее направление зеркала антенного устройства на заданный OB в горизонтальной и в вертикальной плоскости (фиг.1, фиг.3), а также сигналы, пропорциональные текущим значениям модуля вектора скорости  изменения наклонной дальности L сближения подвижного носителя с заданным OB, начальным и текущим значением тангажа и рыскания подвижного носителя. Для этого во время предстартовой подготовки подвижного носителя определяют и задают сигналы в виде пакета последовательных информационных слов (информационный массив), содержащего начальные значения:
изменения наклонной дальности L сближения подвижного носителя с заданным OB, начальным и текущим значением тангажа и рыскания подвижного носителя. Для этого во время предстартовой подготовки подвижного носителя определяют и задают сигналы в виде пакета последовательных информационных слов (информационный массив), содержащего начальные значения:
- пеленгов, т.е. угла наклона εн о и азимута εА о, заданного OB относительно основания антенного устройства в связанной системе координат Ox1y1z1 (фиг.4);
- наклонной дальности L0 до заданного OB и наклонной скорости  сближения с заданным OB основания антенного устройства вместе с подвижным носителем в предстартовом положении (фиг.1);
сближения с заданным OB основания антенного устройства вместе с подвижным носителем в предстартовом положении (фиг.1);
- рыскания ψо, тангажа ϑo, крена γо подвижного носителя вместе с основанием антенного устройства (фиг.5),
а также начальные условия выставки инерциального измерения параметров вектора визирования заданного OB, т.е. сигналы, пропорциональные начальным значениям:
- проекций Vo ζ, Vo η, Vo ξ вектора  линейной скорости предстартового движения основания антенного устройства вместе с подвижным носителем на соответствующие оси местной горизонтальной системы координат Оξηζ (фиг.1, фиг.3);
линейной скорости предстартового движения основания антенного устройства вместе с подвижным носителем на соответствующие оси местной горизонтальной системы координат Оξηζ (фиг.1, фиг.3);
- декартовых координат ξo(D0), ηo(Н0), ζo подвижного носителя в местной горизонтальной системе координат Оξηζ;
- долготы λo и географической широты φо подвижного носителя (фиг.1)
и, кроме того, сигналы, пропорциональные необходимым режимным параметрам по дальности, контрольное слово и командное слово.
Сформулированный пакет далее проверяют на отсутствие в нем искажений сигналов. После этого сигналы, характеризующие пакет последовательных информационных слов, преобразуют в параллельную форму для инерциального измерения параметров вектора визирования заданного OB. Затем на борту подвижного носителя преобразуют сигналы, пропорциональные начальным условиям выставки инерциального измерения параметров вектора визирования заданного OB, в сигналы, пропорциональные начальным значениям:
- проекций Vo x, Vo y, Vo z вектора  линейной скорости предстартового движения основания 10 антенного устройства 3 (фиг.6, фиг.7) вместе с подвижным носителем на соответствующие оси базовой антенной системы координат Oxyz (фиг; 1, фиг.2);
линейной скорости предстартового движения основания 10 антенного устройства 3 (фиг.6, фиг.7) вместе с подвижным носителем на соответствующие оси базовой антенной системы координат Oxyz (фиг; 1, фиг.2);
- углов εг о и εв о визирования заданного OB соответственно в горизонтальной и в вертикальной плоскости в местной горизонтальной системе координат Oξηζ (фиг.1, фиг.3);
- соответствующих eo 1 и eo 2 пространственной угловой координаты  заданного OB в базовой антенной системе координат Oxyz, т.е. сигналов рассогласования (ошибки) между направлением оптической оси зеркала антенного устройства и направлением вектора (линии) визирования на заданный OB, отсчитываемых в базовой антенной системе координат Oxyz относительно оптической оси зеркала антенного устройства во взаимно перпендикулярных плоскостях пеленгования OB (фиг.2);
заданного OB в базовой антенной системе координат Oxyz, т.е. сигналов рассогласования (ошибки) между направлением оптической оси зеркала антенного устройства и направлением вектора (линии) визирования на заданный OB, отсчитываемых в базовой антенной системе координат Oxyz относительно оптической оси зеркала антенного устройства во взаимно перпендикулярных плоскостях пеленгования OB (фиг.2);
- направляющих косинусов βo ij (где i, J=1, 2, 3), определяющих начальное взаимное положение базовой антенной системы координат Oxyz и опорной геоцентрической системы координат Сξ0η0ζ0, связанной одной своей осью Сζo с заданным OB, расположенным на земной поверхности (фиг.1).
Данные преобразования выполняют согласно следующему алгоритму:

где ξo=ξmax - начальное значение горизонтальной декартовой координаты заданного OB, т.е. горизонтальная дальность D0 пуска подвижного носителя;

где ζo - начальное значение боковой декартовой координаты заданного OB в горизонтальной плоскости;



где ro - начальное значение модуля радиуса-вектора центра масс подвижного носителя, определяющего его положение относительно центра Земли (фиг.1);
Но=ηo - высота пуска подвижного носителя;
Ro=Rз - радиус земного сфероида в месте нахождения заданного OB;

где Lo - начальное значение наклонной дальности до заданного OB в предстартовом положении подвижного носителя;
Р0 - начальное значение полупериметра векторного треугольника, образуемого векторами Lo, Ro, ro;




где i, j=1, 2, 3;


В момент старта подвижного носителя обновление сигналов начальной информации прекращается, а во время его перемещения по траектории после старта измеряют сигналы, пропорциональные проекциям nхз, nyз, nzз вектора  кажущегося линейного ускорения движения и проекциям ωхз, ωyз, ωzз вектора
кажущегося линейного ускорения движения и проекциям ωхз, ωyз, ωzз вектора  абсолютной угловой скорости поворота зеркала антенного устройства на соответствующие оси системы координат Охзyзzз, связанной с зеркалом антенного устройства, где Охз - оптическая ось зеркала. По этим измеренным сигналам, принимая во внимание функциональную зависимость (переменную электрическую редукцию) между углами εн з и εA з поворота подвижного зеркала и углами εн и εА поворота линии (вектора) визирования при вращении зеркала одновременно в двух взаимно перпендикулярных плоскостях по углу наклона εН з и по азимуту εA з относительно неподвижного облучателя, жестко установленного на основании антенного устройства, определяют сигналы, пропорциональные проекциям nx, ny, nz вектора кажущегося линейного ускорения движения и проекциям ωх, ωy, ωz вектора абсолютной угловой скорости поворота вектора визирования заданной ТП и/или заданного OB на соответствующие оси базовой антенной системы координат Oxyz согласно алгоритму
абсолютной угловой скорости поворота зеркала антенного устройства на соответствующие оси системы координат Охзyзzз, связанной с зеркалом антенного устройства, где Охз - оптическая ось зеркала. По этим измеренным сигналам, принимая во внимание функциональную зависимость (переменную электрическую редукцию) между углами εн з и εA з поворота подвижного зеркала и углами εн и εА поворота линии (вектора) визирования при вращении зеркала одновременно в двух взаимно перпендикулярных плоскостях по углу наклона εН з и по азимуту εA з относительно неподвижного облучателя, жестко установленного на основании антенного устройства, определяют сигналы, пропорциональные проекциям nx, ny, nz вектора кажущегося линейного ускорения движения и проекциям ωх, ωy, ωz вектора абсолютной угловой скорости поворота вектора визирования заданной ТП и/или заданного OB на соответствующие оси базовой антенной системы координат Oxyz согласно алгоритму

где εн з, εA з - углы поворота зеркала антенного устройства по углу наклона и по азимуту соответственно относительно основания антенного устройства; εн и εA - углы поворота линии визирования заданного OB по углу наклона и по азимуту соответственно относительно основания антенного устройства в связанной системе координат Ox1y1z1 (фиг.4);

где

т.е.




По полученным сигналам с учетом сигналов, определенных и заданных во время предстартовой подготовки подвижного носителя, формируют сигналы, пропорциональные текущим значениям параметров вектора визирования заданного OB, а именно:
- проекций Vx Vy Vz вектора  линейной скорости сближения с заданным OB основания антенного устройства вместе с подвижным носителем на соответствующие оси базовой антенной системы координат;
линейной скорости сближения с заданным OB основания антенного устройства вместе с подвижным носителем на соответствующие оси базовой антенной системы координат;
- наклонной дальности L и наклонной скорости  сближения с заданным OB основания антенного устройства вместе с подвижным носителем;
сближения с заданным OB основания антенного устройства вместе с подвижным носителем;
- составляющих e1 и e2 пространственной угловой координаты  заданного OB в базовой антенной системе координат Oxyz;
заданного OB в базовой антенной системе координат Oxyz;
- направляющих косинусов βij (где i, j=1, 2, 3) текущего взаимного углового положения базовой антенной системы координат Oxyz и опорной геоцентрической системы координат Сξоηоζо, связанной одной своей осью Сζо с заданным OB, расположенным, например, на земной поверхности (фиг.1), согласно следующему алгоритму:

где i, j=1, 2, 3, причем Lo=Lmax - дальность пуска подвижного носителя;
Vo x, Vo y, Vo z, Lo, eo 1, eo 2, βo ij - начальные условия выставки инерциального измерения параметров вектора визирования заданного OB в процессе предстартовой подготовки подвижного носителя к пуску;  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  - подынтегральные функции, которые записываются в виде следующей системы дифференциальных уравнений первого порядка в векторной форме:
- подынтегральные функции, которые записываются в виде следующей системы дифференциальных уравнений первого порядка в векторной форме:
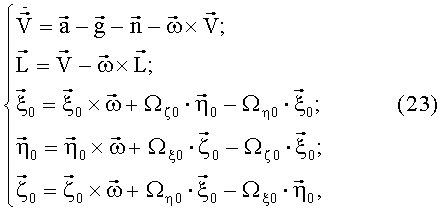
где для случая визирования неподвижного OB R=const и, принимая угловую скорость суточного вращения Земли Ω=const, по теореме Кориолиса имеем:

причем

где µ есть произведение массы Земли на гравитационную постоянную;
ε=ε(ζ1, η1, ξ1) - составляющая силовой функции поля тяготения Земли, характеризующая ее малое отклонение от сферической формы; ζ1, η1, ξ1 - проекции радиуса-вектора r на оси экваториальной (геоцентрической) системы координат Сζ1η1ξ1 (фиг.1);



По сформированным сигналам, пропорциональным текущим значениям наклонной дальности L и наклонной скорости  сближения с заданным OB основания антенного устройства вместе с подвижным носителем, осуществляют инерциальное автосопровождение заданного OB по дальности. Полученные сигналы, пропорциональные текущим значениям составляющих e1 и e2 пространственной угловой координаты
сближения с заданным OB основания антенного устройства вместе с подвижным носителем, осуществляют инерциальное автосопровождение заданного OB по дальности. Полученные сигналы, пропорциональные текущим значениям составляющих e1 и e2 пространственной угловой координаты  заданного OB в базовой антенной системе координат Oxyz, являются сигналами рассогласования между направлением оптической оси зеркала антенного устройства и направлением на заданный OB в двух соответственно взаимно перпендикулярных плоскостях пеленгования в базовой антенной системе координат Oxyz (фиг.2). По сигналам e1 и е2 одновременно осуществляют инерциальное автосопровождение по направлению OB, заданного при предстартовой подготовке подвижного носителя. Для этого преобразуют путем интегрирования в замкнутом контуре инерциального автосопровождения по направлению заданного OB полученные сигналы e1 и e2 в управляющие длиннопериодические сигналы, пропорциональные соответственно скорости
заданного OB в базовой антенной системе координат Oxyz, являются сигналами рассогласования между направлением оптической оси зеркала антенного устройства и направлением на заданный OB в двух соответственно взаимно перпендикулярных плоскостях пеленгования в базовой антенной системе координат Oxyz (фиг.2). По сигналам e1 и е2 одновременно осуществляют инерциальное автосопровождение по направлению OB, заданного при предстартовой подготовке подвижного носителя. Для этого преобразуют путем интегрирования в замкнутом контуре инерциального автосопровождения по направлению заданного OB полученные сигналы e1 и e2 в управляющие длиннопериодические сигналы, пропорциональные соответственно скорости  и
и  , определяющие текущее направление зеркала антенного устройства на заданный OB в вертикальной и в горизонтальной плоскости, обусловленное перемещением основания антенного устройства вместе с подвижным носителем по направлению к заданному OB.
, определяющие текущее направление зеркала антенного устройства на заданный OB в вертикальной и в горизонтальной плоскости, обусловленное перемещением основания антенного устройства вместе с подвижным носителем по направлению к заданному OB.
Эти длиннопериодические сигналы преобразуют в управляющие сигналы, пропорциональные задаваемым угловым скоростям поворота зеркала в вертикальной и в горизонтальной плоскости, которыми воздействуют на соответствующие датчики момента управления трехстепенного гироскопа, установленного во внутренней рамке двухосного карданова подвеса антенного устройства, наружная и внутренняя рамки которого шарнирно связаны с зеркалом.
Под действием длиннопериодических управляющих сигналов создают длиннопериодические возмущающие управляющие моменты, вызывающие моменты гироскопической реакции в опорах осей прецессии соответствующих рамок трехосного карданова подвеса ротора гироскопа. При этом согласно прецессионной теории гироскопа возникает длиннопериодическое прецессионное отклонение соответствующих рамок трехосного карданова подвеса ротора гироскопа с угловой скоростью, близкой по величине к угловой скорости  и
и  изменения соответствующих углов визирования заданного OB. Одновременно определяют сигналы, пропорциональные рассогласованию между направлением вектора
изменения соответствующих углов визирования заданного OB. Одновременно определяют сигналы, пропорциональные рассогласованию между направлением вектора  кинетического момента ротора гироскопа и направлением на OB, задаваемым сформированными длиннопериодическими сигналами, пропорциональными соответственно скорости
кинетического момента ротора гироскопа и направлением на OB, задаваемым сформированными длиннопериодическими сигналами, пропорциональными соответственно скорости  и
и  изменения углов визирования заданного OB в вертикальной и в горизонтальной плоскости и соответственно длиннопериодическим возмущающим управляющим моментам. Эти сигналы преобразуют в длиннопериодические сигналы управления электродвигателями вращения рамок двухосного карданова подвеса антенного устройства. По сигналам управления электродвигатели развивают длиннопериодические вращающие моменты, равные и совпадающие по направлению с направлением соответствующих длиннопериодических возмущающих управляющих моментов, для поворота наружной и внутренней рамок двухосного карданова подвеса антенного устройства и шарнирно связанного с ним зеркала в текущее направление на заданный OB. При этом датчики угла поворота рамок двухосного карданова подвеса формируют сигналы, пропорциональные соответственно углу наклона εн з и азимуту εA з заданного OB относительно основания антенного устройства, которое жестко установлено внутри корпуса подвижного носителя.
изменения углов визирования заданного OB в вертикальной и в горизонтальной плоскости и соответственно длиннопериодическим возмущающим управляющим моментам. Эти сигналы преобразуют в длиннопериодические сигналы управления электродвигателями вращения рамок двухосного карданова подвеса антенного устройства. По сигналам управления электродвигатели развивают длиннопериодические вращающие моменты, равные и совпадающие по направлению с направлением соответствующих длиннопериодических возмущающих управляющих моментов, для поворота наружной и внутренней рамок двухосного карданова подвеса антенного устройства и шарнирно связанного с ним зеркала в текущее направление на заданный OB. При этом датчики угла поворота рамок двухосного карданова подвеса формируют сигналы, пропорциональные соответственно углу наклона εн з и азимуту εA з заданного OB относительно основания антенного устройства, которое жестко установлено внутри корпуса подвижного носителя.
При круговом вращении основания антенного устройства вместе с вращающимся по крену подвижным носителем одновременно с формированием длиннопериодических управляющих сигналов формируют сигналы, пропорциональные углу наклона εн з и азимуту εА з заданного OB относительно основания антенного устройства, характеризующиеся амплитудой и частотой короткопериодических колебаний, сдвинутых по фазе на 90 градусов, соответственно наружной и внутренней рамок двухосного карданова подвеса антенного устройства и шарнирно связанного с ним зеркала относительно своих осей вращения. Указанные сигналы εн з и εА з регистрируют с помощью датчиков угла поворота соответственно наружной и внутренней рамок двухосного карданова подвеса антенного устройства как аддитивные короткопериодические сигналы, которые формируются согласно алгоритму:

при этом

или

где Δt - интервал дискретизации, i - инкремент (шаг интегрирования), т.е. при γо=0 получаем  ,
,
где  - угловая скорость (частота) вращения основания антенного устройства вместе с вращающимся по крену у подвижным носителем.
- угловая скорость (частота) вращения основания антенного устройства вместе с вращающимся по крену у подвижным носителем.
Рассмотрим теоретические предпосылки, лежащие в основе предлагаемого способа для случая вращающегося по крену подвижного носителя вместе с основанием антенного устройства, содержащего двухосный карданов подвес, несущий во внутренней рамке акселерометры и гироприборы.
Принимая во внимание полученные выше соотношения (19), (20), (21), (29), (30), (32), полагая отсутствие колебаний подвижного носителя относительно своего центра масс по рысканию ψ и по тангажу ϑ (фиг.5) и допуская, что сигналы, пропорциональные угловой скорости  изменения горизонтального угла визирования εг и угловой скорости
изменения горизонтального угла визирования εг и угловой скорости  изменения вертикального угла визирования εв, равны нулю, при этом считая, что εг=0 и εв=const, при круговом вращении основания антенного устройства вместе с корпусом вращающегося по крену γ с угловой скоростью подвижного носителя регистрируют при этих условиях сигналы, пропорциональные углу отклонения по наклону εн наружной рамки и углу отклонения по азимуту εA внутренней рамки двухосного карданова подвеса антенного устройства, формируемые согласно алгоритму:
изменения вертикального угла визирования εв, равны нулю, при этом считая, что εг=0 и εв=const, при круговом вращении основания антенного устройства вместе с корпусом вращающегося по крену γ с угловой скоростью подвижного носителя регистрируют при этих условиях сигналы, пропорциональные углу отклонения по наклону εн наружной рамки и углу отклонения по азимуту εA внутренней рамки двухосного карданова подвеса антенного устройства, формируемые согласно алгоритму:

При упомянутых выше условиях сигналы, пропорциональные угловым скоростям  и
и  изменения угла наклона εн и азимута εА определяются, следовательно, из соотношений, полученных путем дифференцирования уравнений (33), т.е.
изменения угла наклона εн и азимута εА определяются, следовательно, из соотношений, полученных путем дифференцирования уравнений (33), т.е.
При этом амплитуды колебаний наружной рамки и внутренней рамки двухосного карданова подвеса антенного устройства соответственно по углу наклона εн max и по азимуту εА max определяются из соотношений

Из соотношений (33) следует, что

причем
где 
 - модули значений амплитуды угловой скорости колебаний соответственно наружной и внутренней рамок двухосного карданова подвеса антенного устройства по углу наклона εн и азимуту εA с угловой частотой . Если предположить, что εн max=εA max=εmax, то из выражений (36) следует
- модули значений амплитуды угловой скорости колебаний соответственно наружной и внутренней рамок двухосного карданова подвеса антенного устройства по углу наклона εн и азимуту εA с угловой частотой . Если предположить, что εн max=εA max=εmax, то из выражений (36) следует

и выражение

есть уравнение окружности радиусом

характеризующее круговое вращение двухосного карданова подвеса, связанного шарнирно с зеркалом, вместе с основанием антенного устройства, установленного жестко внутри корпуса вращающегося по крену подвижного носителя.
Из выражений (31), (35), (38) следует, что

Таким образом, при принятых условиях колебания наружной и внутренней рамок двухосного карданова подвеса антенного устройства по сравнению с длиннопериодическими отклонениями, обусловленными угловыми скоростями и  , при круговом вращении по крену γ основания антенного устройства с угловой частотой являются короткопериодическими с амплитудой колебания εн max и εA max; а также с частотой и периодом колебаний соответственно
, при круговом вращении по крену γ основания антенного устройства с угловой частотой являются короткопериодическими с амплитудой колебания εн max и εA max; а также с частотой и периодом колебаний соответственно


Поэтому по предлагаемому способу одновременно с формированием упомянутых выше длиннопериодических сигналов формирует сигналы, характеризующиеся амплитудой εн max и εA max и частотой fγ короткопериодических колебаний, сдвинутых по фазе на 90 градусов, т.е. согласно выражениям (41)

наружной и внутренней рамок двухосного карданова подвеса антенного устройства и шарнирно связанного с ним зеркала относительно своих осей вращения.
Из полученных выше соотношений следует также важный практический вывод, заключающийся в том, что, например, для измерения угловой скорости
 не существуют в настоящее время гироскопические измерители с таким динамическим диапазоном. Поэтому для решения навигационной задачи и задачи управления и стабилизации подвижных носителей, вращающихся с указанной выше угловой скоростью по крену, бесплатформенные системы инерциальной навигации не могут быть применены.
не существуют в настоящее время гироскопические измерители с таким динамическим диапазоном. Поэтому для решения навигационной задачи и задачи управления и стабилизации подвижных носителей, вращающихся с указанной выше угловой скоростью по крену, бесплатформенные системы инерциальной навигации не могут быть применены.
Однако по предлагаемому способу на гироскопические измерители угловой скорости, установленные во внутренней рамке двухосного карданова подвеса антенного устройства, основание которого жестко закреплено внутри корпуса подвижного носителя, вращающегося по крену с угловой скоростью  ,
,
воздействует угловая скорость колебания наружной и внутренней рамок двухосного карданова подвеса, амплитуда которых определяется соотношением (37). Величина амплитуды зависит, прежде всего, от величины амплитуды угла наклона εн max и азимута εA max; которая существенно зависит согласно соотношениям (35) от величины вертикального угла визирования εв.
Так, например, при  и при
и при  амплитуда угловой скорости
амплитуда угловой скорости  и
и  достигает величины приблизительно
достигает величины приблизительно  , при
, при  достигает величины
достигает величины  и только при
и только при  достигает величины
достигает величины  , что укладывается в пределы динамического диапазона существующих в настоящее время гироскопических датчиков угловой скорости. Следовательно, при малых вертикальных углах визирования, практически не превышающих 10°, амплитуда угловой скорости колебания рамок двухосного карданова подвеса антенного устройства, основание которого вращается вместе с вращающимся по крену подвижным носителем, в 50-100 раз меньше угловой скорости .
, что укладывается в пределы динамического диапазона существующих в настоящее время гироскопических датчиков угловой скорости. Следовательно, при малых вертикальных углах визирования, практически не превышающих 10°, амплитуда угловой скорости колебания рамок двухосного карданова подвеса антенного устройства, основание которого вращается вместе с вращающимся по крену подвижным носителем, в 50-100 раз меньше угловой скорости .
Согласно алгоритмам (29) и (30) амплитуда короткопериодических сигналов, пропорциональных аддитивным короткопериодическим колебаниям наружной рамки по углу наклона и внутренней рамки по азимуту двухосного карданова подвеса антенного устройства и соответствующим им колебаниям угловой скорости их изменения, модулируется более низкой частотой fψ и fϑ колебаний подвижного носителя по рысканию и по тангажу по сравнению с частотой fγ колебания рамок двухосного карданова подвеса антенного устройства, обусловленной круговым вращением его основания вместе с вращением по крену подвижного носителя.
Колебания подвижного носителя по рысканию ψ и по тангажу ϑ при одновременном его вращении по крену воздействуют на основание антенного устройства и вызывают аддитивные короткопериодические колебания наружной и внутренней рамок двухосного карданова подвеса антенного устройства, регистрируемые в виде пропорциональных им аддитивных короткопериодических сигналов, упомянутых выше.
Аддитивные короткопериодические колебания рамок двухосного карданова подвеса антенного устройства вызывают аддитивные короткопериодические возмущающие момента, которые, в свою очередь, вызывают момент гироскопической реакции, т.е. гироскопический момент, в опорах осей прецессии соответствующих рамок карданова подвеса ротора гироскопа. При этом согласно прецессионной теории гироскопа возникает короткопериодическое прецессионное отклонение соответствующих рамок карданова подвеса ротора гироскопа с угловыми скоростями, направление вектора которых совпадает с направлением аддитивных короткопериодических возмущающих моментов. Одновременно определяют сигналы, пропорциональные рассогласованию между направлением вектора кинетического момента  ротора гироскопа и направлением вектора аддитивных короткопериодических возмущающих моментов. Эти сигналы преобразуют в аддитивные короткопериодические сигналы управления соответствующими электродвигателями вращения рамок двухосного карданова подвеса антенного устройства. По сигналам управления электродвигатели развивают аддитивные короткопериодические поворотные моменты, равные и противоположно направленные соответственно короткопериодическим возмущающим моментам, действующим вокруг соответствующих осей вращения наружной и внутренней рамок карданова подвеса антенного устройства. По сигналам управления электродвигатели развивают эти поворотные моменты для отработки аддитивных короткопериодических сигналов и стабилизации зеркала по рысканию и тангажу в текущем направлении на заданный OB по углу визирования в горизонтальной плоскости εг и по углу визирования в вертикальной плоскости εв с одновременной отработкой сигналов, пропорциональных угловой скорости короткопериодических колебаний рамок двухосного карданова подвеса антенного устройства по углу наклона и по азимуту.
ротора гироскопа и направлением вектора аддитивных короткопериодических возмущающих моментов. Эти сигналы преобразуют в аддитивные короткопериодические сигналы управления соответствующими электродвигателями вращения рамок двухосного карданова подвеса антенного устройства. По сигналам управления электродвигатели развивают аддитивные короткопериодические поворотные моменты, равные и противоположно направленные соответственно короткопериодическим возмущающим моментам, действующим вокруг соответствующих осей вращения наружной и внутренней рамок карданова подвеса антенного устройства. По сигналам управления электродвигатели развивают эти поворотные моменты для отработки аддитивных короткопериодических сигналов и стабилизации зеркала по рысканию и тангажу в текущем направлении на заданный OB по углу визирования в горизонтальной плоскости εг и по углу визирования в вертикальной плоскости εв с одновременной отработкой сигналов, пропорциональных угловой скорости короткопериодических колебаний рамок двухосного карданова подвеса антенного устройства по углу наклона и по азимуту.
Отработанные аддитивные короткопериодические сигналы εн з, εА з регистрируют. По этим короткопериодическим сигналам, характеризующимся амплитудой и угловой частотой  короткопериодических колебаний рамок двухосного карданова подвеса антенного устройства по углу наклона εн з и по азимуту εА з, определяют сигнал, пропорциональный периоду колебаний рамок двухосного карданова подвеса антенного устройства, который согласно соотношению (43) обратно пропорционален угловой частоте
короткопериодических колебаний рамок двухосного карданова подвеса антенного устройства по углу наклона εн з и по азимуту εА з, определяют сигнал, пропорциональный периоду колебаний рамок двухосного карданова подвеса антенного устройства, который согласно соотношению (43) обратно пропорционален угловой частоте  вращения по крену подвижного носителя. По этому сигналу в течение всего времени вращения по крену подвижного носителя антенного устройства определяют сигнал, пропорциональный величине угловой скорости вращения по крену подвижного носителя.
вращения по крену подвижного носителя. По этому сигналу в течение всего времени вращения по крену подвижного носителя антенного устройства определяют сигнал, пропорциональный величине угловой скорости вращения по крену подвижного носителя.
Одновременно по зарегистрированным короткопериодическим сигналам также формируют при необходимости короткопериодические сигналы торможения вращения по крену подвижного носителя, сдвинутые по фазе на 90°, пропорциональные короткопериодическим колебаниям рамок двухосного краданова подвеса антенного устройства по углу наклона εн з и по азимуту εА з, а также пропорциональные угловой скорости  и
и  изменения угла наклона и азимута, согласно алгоритмам (29) и (30), реализуемым двухосным кардановым подвесом антенного устройства. Эти сигналы преобразуют в электрические сигналы торможения и одновременно подают на входы приводов соответствующих дифференциальных АДР, осуществляющих управление подвижным носителем относительно двух взаимно перпендикулярных осей симметрии подвижного носителя в плоскости миделя. Приводы дифференциальных АДР развивают аддитивные короткопериодические вращающие моменты торможения, равные и противоположно направленные соответственно направлению действующих аддитивных короткопериодических возмущающих моментов, обусловленных вращением по крену подвижного носителя. Вследствие этого результирующий момент, противоположно направленный вектору угловой скорости вращения по крену подвижного носителя, вызывает торможения вращения по крену.
изменения угла наклона и азимута, согласно алгоритмам (29) и (30), реализуемым двухосным кардановым подвесом антенного устройства. Эти сигналы преобразуют в электрические сигналы торможения и одновременно подают на входы приводов соответствующих дифференциальных АДР, осуществляющих управление подвижным носителем относительно двух взаимно перпендикулярных осей симметрии подвижного носителя в плоскости миделя. Приводы дифференциальных АДР развивают аддитивные короткопериодические вращающие моменты торможения, равные и противоположно направленные соответственно направлению действующих аддитивных короткопериодических возмущающих моментов, обусловленных вращением по крену подвижного носителя. Вследствие этого результирующий момент, противоположно направленный вектору угловой скорости вращения по крену подвижного носителя, вызывает торможения вращения по крену.
При торможении вращения по крену подвижного носителя, когда сигнал, пропорциональный периоду короткопериодических колебаний рамок двухосного карданова подвеса антенного устройства, превышает величину, пропорциональную пороговому значению, соответствующему угловой скорости вращения по крену подвижного носителя, близкой к нулю, определяют сигнал остановки вращения по крену подвижного носителя антенного устройства.
При этом ускоренное торможение вращения подвижного носителя по крену одновременно обеспечивает как формируемыми короткопериодическими сигналами торможения согласно предлагаемому способу, так и аэродинамическими стабилизаторами подвижного носителя. При торможении вращения по крену подвижного носителя одновременно определяют сигналы, пропорциональные углу наклона εн з и азимуту εА з, сигналы, пропорциональные углам визирования в вертикальной εв з и в горизонтальной εг з плоскости и скорости их изменения  и
и  , а также с учетом переменной электрической редукции угол наклона εн и азимута εА заданного OB, угол визирования в вертикальной εв и в горизонтальной плоскости εг заданного OB и скорости их изменения
, а также с учетом переменной электрической редукции угол наклона εн и азимута εА заданного OB, угол визирования в вертикальной εв и в горизонтальной плоскости εг заданного OB и скорости их изменения  и
и  .
.
После остановки вращения по крену подвижного носителя одновременно осуществляют стабилизацию текущего направления зеркала и, следовательно, линии (вектора) визирования заданного OB от действующих короткопериодических колебаний подвижного носителя относительно своего центра масс по крену γ, по тангажу ϑ и по рысканию ψ.
При этом по сформулированным управляющим длиннопериодическим сигналам, пропорциональным скорости  и
и  изменения углов визирования заданного OB в горизонтальной плоскости εг з и в вертикальной плоскости εв з, определяют стабилизированное от аддитивных короткопериодических колебаний текущее направление зеркала и соответственно направление линии (вектора) визирования антенного устройства на заданный OB в горизонтальной и в вертикальной плоскости. По полученным сигналам осуществляют инерциальное управление текущим стабилизированным направлением зеркала и соответственно направлением линии (вектора) визирования заданного OB также и при круговом вращении основания антенного устройства вместе с вращающимся по крену подвижным носителем.
изменения углов визирования заданного OB в горизонтальной плоскости εг з и в вертикальной плоскости εв з, определяют стабилизированное от аддитивных короткопериодических колебаний текущее направление зеркала и соответственно направление линии (вектора) визирования антенного устройства на заданный OB в горизонтальной и в вертикальной плоскости. По полученным сигналам осуществляют инерциальное управление текущим стабилизированным направлением зеркала и соответственно направлением линии (вектора) визирования заданного OB также и при круговом вращении основания антенного устройства вместе с вращающимся по крену подвижным носителем.
При движении по траектории после старта невращающегося или вращающегося по крену подвижного носителя по сигналам, пропорциональным полученным проекциям ωх, ωy, ωz вектора  абсолютной угловой скорости поворота вектора визирования заданного OB на соответствующие оси базовой антенной системы координат Oxyz (фиг.1, фиг.2), формируют сигналы, пропорциональные проекциям
абсолютной угловой скорости поворота вектора визирования заданного OB на соответствующие оси базовой антенной системы координат Oxyz (фиг.1, фиг.2), формируют сигналы, пропорциональные проекциям  ,
,  ,
,  вектора
вектора  абсолютной угловой скорости поворота вектора визирования заданного OB на соответствующие оси связанной системы координат Ox1y1z1, согласно следующему алгоритму (фиг.4):
абсолютной угловой скорости поворота вектора визирования заданного OB на соответствующие оси связанной системы координат Ox1y1z1, согласно следующему алгоритму (фиг.4):

Затем по сигналам, полученным согласно алгоритму (45), формируют сигналы, пропорциональные проекциям  ,
,  ,
,  вектора
вектора  углового ускорения поворота вектора визирования заданного OB на соответствующие оси связанной системы координат Оx1y1z1 (фиг.4).
углового ускорения поворота вектора визирования заданного OB на соответствующие оси связанной системы координат Оx1y1z1 (фиг.4).
С учетом начальных значений крена γo, тангажа ϑо и рыскания ψо, заданных при предстартовой подготовке подвижного носителя к пуску, определяют короткопериодические сигналы, характеризующие текущие значения крена γ, тангажа ϑ и рыскания ψ и соответственно угловой скорости их изменения согласно алгоритму
где
Далее по полученным сигналам формируют задаваемые короткопериодические сигналы стабилизации подвижного носителя в вертикальной плоскости δв зад и в горизонтальной плоскости δг зад, также по крену δк зад согласно следующему алгоритму:
где kϑ,  ,
,  ; kψ,
; kψ,  ,
,  ; kγ,
; kγ,  ,
,  - коэффициенты пропорциональности.
- коэффициенты пропорциональности.
По этим короткопериодическим сигналам формируют сигналы, пропорциональные короткопериодическим стабилизирующим моментам, которые подают на вход каждого широкополосного контура стабилизации соответствующих четырех приводов дифференциальных АДР подвижного носителя.
Одновременно по сигналам, пропорциональным полученным проекциям nx, ny, nz вектора  кажущегося линейного ускорения движения вектора визирования заданного OB на соответствующие оси базовой антенной системы координат Oxyz, формируют сигналы, пропорциональные проекциям nξ, nη, nζ вектора
кажущегося линейного ускорения движения вектора визирования заданного OB на соответствующие оси базовой антенной системы координат Oxyz, формируют сигналы, пропорциональные проекциям nξ, nη, nζ вектора  кажущегося линейного ускорения движения вектора визирования заданного OB на соответствующие оси местной горизонтальной системы координат Оξηζ (фиг.3), согласно следующему алгоритму:
кажущегося линейного ускорения движения вектора визирования заданного OB на соответствующие оси местной горизонтальной системы координат Оξηζ (фиг.3), согласно следующему алгоритму:

По полученным сигналам, пропорциональным текущим значениям:
- модуля вектора скорости  изменения наклонной дальности L сближения с заданным OB основания антенного устройства вместе с подвижным носителем,
изменения наклонной дальности L сближения с заданным OB основания антенного устройства вместе с подвижным носителем,
- скорости  и
и  изменения углов визирования заданного OB соответственно в горизонтальной и в вертикальной плоскости,
изменения углов визирования заданного OB соответственно в горизонтальной и в вертикальной плоскости,
- начальным εг o и εв о и текущим значениям εг и εв углов визирования заданного OB в горизонтальной плоскости и в вертикальной плоскости,
формируют управляющие сигналы самонаведения подвижного носителя на заданный OB, пропорциональные заданным перегрузкам соответственно в вертикальной и в горизонтальной плоскости, согласно, например, следующим алгоритмам:
где кг, кв, 
 коэффициенты пропорциональности, причем текущие значения углов визирования εг и εв заданного OB определяются согласно алгоритмам (20), скорости
коэффициенты пропорциональности, причем текущие значения углов визирования εг и εв заданного OB определяются согласно алгоритмам (20), скорости  и
и  их изменения определяются согласно алгоритмам (21), а начальные значения углов визирования εг о и εв о заданного OB - согласно алгоритмам (1), (2), (3); Тф - постоянная времени фильтра, кроме того,
их изменения определяются согласно алгоритмам (21), а начальные значения углов визирования εг о и εв о заданного OB - согласно алгоритмам (1), (2), (3); Тф - постоянная времени фильтра, кроме того,
где no - значение перегрузки, компенсирующей влияние гравитационной составляющей; b1 и b2 - постоянные коэффициенты, определяемые для каждой траектории перемещения подвижного носителя.
Затем полученные сигналы, пропорциональные задаваемым перегрузкам nг зад и nв зад, сравнивают соответственно с измеренными сигналами, пропорциональными согласно соотношениям (49) проекциям nη и nζ вектора  кажущегося ускорения движения на оси местной горизонтальной системы координат Oξηζ. Полученные сигналы, пропорциональные результату сравнения, преобразуют в управляющие длиннопериодические сигналы, которые поступают на вход узкополосных контуров управления соответствующих четырех приводов дифференциальных АДР подвижного носителя, где их суммируют со сформированными короткопериодическими сигналами, пропорциональными стабилизирующим моментам. Полученные сигналы преобразуют в электрические сигналы управления и стабилизации подвижного носителя, усиливают их по мощности для управления соответствующими четырьмя дифференциальными АДР подвижного носителя для отработки этих сигналов. При этом формируют массив сигналов обратной связи, которые вычитают из суммы массивов сформированных короткопериодических сигналов, пропорциональных стабилизирующим моментам, и соответственно сигналов, полученных сравнением сигналов, пропорциональных задаваемым перегрузкам nг зад и nв зад в горизонтальной плоскости и в вертикальной плоскости, и соответственно с сигналами, пропорциональными сформированным проекциям nζ и nη вектора
кажущегося ускорения движения на оси местной горизонтальной системы координат Oξηζ. Полученные сигналы, пропорциональные результату сравнения, преобразуют в управляющие длиннопериодические сигналы, которые поступают на вход узкополосных контуров управления соответствующих четырех приводов дифференциальных АДР подвижного носителя, где их суммируют со сформированными короткопериодическими сигналами, пропорциональными стабилизирующим моментам. Полученные сигналы преобразуют в электрические сигналы управления и стабилизации подвижного носителя, усиливают их по мощности для управления соответствующими четырьмя дифференциальными АДР подвижного носителя для отработки этих сигналов. При этом формируют массив сигналов обратной связи, которые вычитают из суммы массивов сформированных короткопериодических сигналов, пропорциональных стабилизирующим моментам, и соответственно сигналов, полученных сравнением сигналов, пропорциональных задаваемым перегрузкам nг зад и nв зад в горизонтальной плоскости и в вертикальной плоскости, и соответственно с сигналами, пропорциональными сформированным проекциям nζ и nη вектора  кажущегося ускорения движения подвижного носителя на соответствующие оси местной горизонтальной системы координат Оξηζ.
кажущегося ускорения движения подвижного носителя на соответствующие оси местной горизонтальной системы координат Оξηζ.
Предлагаемая система управления и стабилизации подвижного носителя (фиг.6, фиг.7), осуществляющая способ, характеризуется тем, что включает в свой состав интегрированную бортовую систему самонаведения (БССН) 1 и систему управления 2 приводами четырех дифференциальных аэродинамических рулей (АДР) подвижного носителя (фиг.6). При этом БССН 1 содержит антенное устройство 3 и ЦВУ 4. Антенное устройство 3 включает в свой состав зеркало 5 с облучателем 6 и волноводно-коммутирующим устройством, двухосный карданов подвес 7, ось 8 вращения наружной рамки 9 которого установлена на основании 10 антенного устройства 3, а ось 11 вращения внутренней рамки 12 установлена в наружной рамке 9 перпендикулярно к ее оси 8 вращения, электродвигатель 13 поворота наружной рамки 9 двухосного краданова подвеса 7 и электродвигатель 14 поворота внутренней рамки 12 двухосного карданова подвеса 7. Антенное устройство 3 содержит датчик 15 угла поворота наружной рамки 9 двухосного карданова подвеса 7, датчик 16 угла поворота внутренней рамки 12 двухосного карданова подвеса 7 соответственно по углу наклона и по азимуту, а также управляемый трехстепенной гироскоп 17, двухканальный гироскопический датчик угловой скорости 18, три однокомпонентных измерителя 19, 20, 21 соответствующих проекций кажущегося линейного ускорения (фиг.7). Причем управляемый трехстепенной гироскоп 17 установлен во внутренней рамке 12 двухосного карданова подвеса 7 антенного устройства 3 так, что направление вектора кинетического момента  его ротора 22 в зааретированном положении гироскопа 17 совпадает с нулевым направлением линии визирования антенного устройства 3 (фиг.6). Гироскоп 17 содержит трехосный карданов подвес 23 ротора 22, датчик 24 угла прецессии внутренней рамки 25 трехосного карданова подвеса 23 ротора 22 и датчик 26 угла прецессии наружной рамки 27 трехосного карданова подвеса 23 ротора 22 гироскопа 17, датчик 28 момента управления направлением поворота внутренней рамки 25 трехосного карданова подвеса 23 ротора 22 гироскопа 17, датчик 29 момента управления направлением поворота наружной рамки 27 трехосного карданова подвеса 23 ротора 22 гироскопа 17. При этом ось 30 собственного вращения ротора 22 гироскопа 17 установлена во внутренней рамке 25 трехосного карданова подвеса 23 ротора 22 гироскопа 17, ось 31 вращение которой установлена в наружной рамке 27 трехосного карданова подвеса 23 ротора 22 гироскопа 17, ось 32 вращение которой, в свою очередь, установлена в корпусе гироскопа 17. Корпус гироскопа 17 жестко закреплен во внутренней рамке 12 двухосного карданова подвеса 7 антенного устройства 3. На соответствующих осях 31 и 32 вращения рамок 25 и 27 карданова подвеса 23 ротора 22 установлены соответственно датчики 24 и 26 угла прецессии внутренней рамки 25 и наружной рамки 27 трехосного карданова подвеса 23 ротора 22 гироскопа 17. Антенное устройство 3 также включает в свой состав узел 33 гиростабилизации и управления направлением зеркала 5 антенного устройства 3 на OB по углу наклона, узел 34 гиростабилизации и управления направлением зеркала 5 антенного устройства 3 на OB по азимуту, а также усилители 35 и 36 сигналов обратной связи в соответствующих каналах двухканального гироскопического датчика 18 измерения составляющих вектора абсолютной угловой скорости поворота зеркала 5 антенного устройства 3. Двухканальный гироскопический датчик угловой скорости (ДУС) 18 (фиг.7) установлен во внутренней рамке 12 двухосного карданова подвеса 7 антенного устройства 3 так, что в зааренированном положении одна из его осей чувствительности совпадает с нулевым направлением линии визирования антенного устройства 3, а другая его ось чувствительности ориентирована, например, вверх вдоль положительного направления оси 11 вращения внутренней рамки 12 двухосного карданова подвеса 7 антенного устройства 3. При этом направление вектора кинетического момента
его ротора 22 в зааретированном положении гироскопа 17 совпадает с нулевым направлением линии визирования антенного устройства 3 (фиг.6). Гироскоп 17 содержит трехосный карданов подвес 23 ротора 22, датчик 24 угла прецессии внутренней рамки 25 трехосного карданова подвеса 23 ротора 22 и датчик 26 угла прецессии наружной рамки 27 трехосного карданова подвеса 23 ротора 22 гироскопа 17, датчик 28 момента управления направлением поворота внутренней рамки 25 трехосного карданова подвеса 23 ротора 22 гироскопа 17, датчик 29 момента управления направлением поворота наружной рамки 27 трехосного карданова подвеса 23 ротора 22 гироскопа 17. При этом ось 30 собственного вращения ротора 22 гироскопа 17 установлена во внутренней рамке 25 трехосного карданова подвеса 23 ротора 22 гироскопа 17, ось 31 вращение которой установлена в наружной рамке 27 трехосного карданова подвеса 23 ротора 22 гироскопа 17, ось 32 вращение которой, в свою очередь, установлена в корпусе гироскопа 17. Корпус гироскопа 17 жестко закреплен во внутренней рамке 12 двухосного карданова подвеса 7 антенного устройства 3. На соответствующих осях 31 и 32 вращения рамок 25 и 27 карданова подвеса 23 ротора 22 установлены соответственно датчики 24 и 26 угла прецессии внутренней рамки 25 и наружной рамки 27 трехосного карданова подвеса 23 ротора 22 гироскопа 17. Антенное устройство 3 также включает в свой состав узел 33 гиростабилизации и управления направлением зеркала 5 антенного устройства 3 на OB по углу наклона, узел 34 гиростабилизации и управления направлением зеркала 5 антенного устройства 3 на OB по азимуту, а также усилители 35 и 36 сигналов обратной связи в соответствующих каналах двухканального гироскопического датчика 18 измерения составляющих вектора абсолютной угловой скорости поворота зеркала 5 антенного устройства 3. Двухканальный гироскопический датчик угловой скорости (ДУС) 18 (фиг.7) установлен во внутренней рамке 12 двухосного карданова подвеса 7 антенного устройства 3 так, что в зааренированном положении одна из его осей чувствительности совпадает с нулевым направлением линии визирования антенного устройства 3, а другая его ось чувствительности ориентирована, например, вверх вдоль положительного направления оси 11 вращения внутренней рамки 12 двухосного карданова подвеса 7 антенного устройства 3. При этом направление вектора кинетического момента  ротора гироскопического ДУС 18 совпадает с положительным направлением оси 8 вращения наружной рамки 9 двухосного карданова подвеса 7 антенного устройства 3. Все три однокомпонентных измерителя 19, 20, 21 соответствующих проекций кажущегося линейного ускорения установлены во внутренней рамке 12 двухосного карданова подвеса 7 антенного устройства 3 так, что ось чувствительности одного из них взаимно ортогональна по отношению к взаимно ортогональным осям чувствительности двух других однокомпонентных измерителей соответствующих проекций кажущегося линейного ускорения. При этом ось чувствительности одного из трех однокомпонентных измерителей соответствующих проекций кажущегося линейного ускорения совпадает в зааретированном положении с нулевым положением линии визирования антенного устройства 3. Выходы соответствующих датчиков угла 24 и 26 прецессии внутренней рамки 25 и наружной рамки 27 трехосного карданова подвеса 23 ротора 22 гироскопа 17 соответственно соединены с входом узлов 34 и 33 гиростабилизации и управления направлением зеркала 5 антенного устройства 3 на заданный OB по углу наклона и по азимуту, выходы которых, в свою очередь, соединены соответственно с электродвигателями 13 и 14 поворота наружной рамки 9 и внутренней рамки 12 двухосного карданова подвеса 7 антенного устройства 3. При этом выходы датчиков угла прецессии внутренней и наружной рамки трехосного карданова подвеса ротора гироскопического ДУС 18 соединены соответственно с входом усилителей 35 и 36 сигналов отрицательной обратной связи, выходы которых соединены соответственно с датчиками момента внутренней и наружной рамок гироскопического ДУС 18.
ротора гироскопического ДУС 18 совпадает с положительным направлением оси 8 вращения наружной рамки 9 двухосного карданова подвеса 7 антенного устройства 3. Все три однокомпонентных измерителя 19, 20, 21 соответствующих проекций кажущегося линейного ускорения установлены во внутренней рамке 12 двухосного карданова подвеса 7 антенного устройства 3 так, что ось чувствительности одного из них взаимно ортогональна по отношению к взаимно ортогональным осям чувствительности двух других однокомпонентных измерителей соответствующих проекций кажущегося линейного ускорения. При этом ось чувствительности одного из трех однокомпонентных измерителей соответствующих проекций кажущегося линейного ускорения совпадает в зааретированном положении с нулевым положением линии визирования антенного устройства 3. Выходы соответствующих датчиков угла 24 и 26 прецессии внутренней рамки 25 и наружной рамки 27 трехосного карданова подвеса 23 ротора 22 гироскопа 17 соответственно соединены с входом узлов 34 и 33 гиростабилизации и управления направлением зеркала 5 антенного устройства 3 на заданный OB по углу наклона и по азимуту, выходы которых, в свою очередь, соединены соответственно с электродвигателями 13 и 14 поворота наружной рамки 9 и внутренней рамки 12 двухосного карданова подвеса 7 антенного устройства 3. При этом выходы датчиков угла прецессии внутренней и наружной рамки трехосного карданова подвеса ротора гироскопического ДУС 18 соединены соответственно с входом усилителей 35 и 36 сигналов отрицательной обратной связи, выходы которых соединены соответственно с датчиками момента внутренней и наружной рамок гироскопического ДУС 18.
Зеркало 5 антенного устройства 3 выполнено с возможностью поворота в двух взаимно перпендикулярных плоскостях с помощью двухстепенного шарнира 37 относительно центра излучения облучателя 6, жестко закрепленного на основании 10 антенного устройства 3. При этом зеркало 5 шарнирно соединено тягами 38 39 механического координатора антенного устройства 3 соответственно с наружной рамкой 9 и с внутренней рамкой 12 двухосного карданова подвеса 7 антенного устройства 3 так, что расстояние между каждым из шарниров тяг 38 и 39 на задней поверхности зеркала 5 и его центром вращения равно расстоянию между каждым из шарниров, установленных соответственно на наружной рамке 9 и на внутренней рамке 12 двухосного карданова подвеса 7 антенного устройства 3, и центром вращения этих рамок.
Антенное устройство включает в свой состав также узел 40 формирования управляющего сигнала, пропорционального задаваемой угловой скорости поворота зеркала 5 в вертикальной плоскости, и узел 41 формирования управляющего сигнала, пропорционального задаваемой угловой скорости поворота зеркала 5 в горизонтальной плоскости, и, кроме того, узел 42 масштабирования сигнала, снимаемого с выхода узла 40 формирования управляющего сигнала задаваемой угловой скорости поворота зеркала 5 в вертикальной плоскости, соединенного с входом датчика 29 момента управления направлением поворота наружной рамки 27 трехосного карданова подвеса 23 ротора 22 гироскопа 17. Причем сигнал, снимаемый с выхода узла 42 масштабирования сигнала с выхода узла 40 формирования управляющего сигнала угловой скорости поворота зеркала 5 в вертикальной плоскости, пропорционален проекции вектора абсолютной угловой скорости поворота зеркала 5 антенного устройства 3 на поперечную ось базовой антенной системы координат Oxyz. Выход узла 41 формирования управляющего сигнала, пропорционального задаваемой угловой скорости поворота зеркала 5 в горизонтальной плоскости, соединен с входом датчика 28 момента управления направлением поворота внутренней рамки 25 трехосного карданова подвеса 23 ротора 22 гироскопа 17.
Выходы трех однокомпонентных измерителей 19, 20, 21 проекций кажущегося линейного ускорения соединены соответственно с первым, вторым и третьим входами ЦВУ 4. Выходы двухканального гироскопического ДУС 18 и выход узла 42 масштабирования соединены соответственно с четвертым, пятым и шестым входами ЦВУ 4. Выход датчика 15 угла поворота наружной рамки 9 и выход датчика 16 угла поворота внутренней рамки 12 двухосного карданова подвеса 7 соответственно по углу наклона и по азимуту соединены с седьмым входом и с восьмым входом ЦВУ 4 соответственно. Первый и второй выход ЦВУ 4 соединен соответственно с входом узла 40 формирования управляющего сигнала, пропорционального задаваемой угловой скорости поворота зеркала 5 в вертикальной плоскости, и с входом узла 41 формирования управляющего сигнала, пропорционального задаваемой угловой скорости поворота зеркала 5 в горизонтальной плоскости. Информационная линия связи 43 соединяет аппаратуру, внешнюю по отношению к заявляемой системе, с информационным девятым входом ЦВУ 4 интегрированной БССН 1. Информационный третий выход ЦВУ 4 соединен информационной линией связи 44 с информационным первым входом системы управления 2 четырех дифференциальных АДР 45, 46, 47, 48 подвижного носителя. При этом система управления 2 четырех дифференциальных АДР 45, 46, 47, 48 подвижного носителя содержит узел 49 формирования массива сигналов управления и стабилизации подвижного носителя, узел 50 формирования сигналов дифференциального управления четырьмя электродвигателями 51, 52, 53, 54 соответствующих дифференциальных АДР 45, 46, 47, 48 подвижного носителя, четыре датчика 55, 56, 57, 58 сигнала отрицательной обратной связи, узел 59 формирования массива сигналов отрицательной обратной связи. Причем информационный вход узла 49 формирования массива сигналов управления и стабилизации подвижного носителя соединен информационной линией связи 44 с информационным третьим выходом ЦВУ 4, информационный выход узла 49 формирования массива сигналов управления и стабилизации подвижного носителя соединен информационной линией связи 60 с информационным входом узла 50 формирования сигналов дифференциального управления четырьмя электродвигателями 51, 52, 53, 54 соответствующих дифференциальных АДР 45, 46, 47, 48 подвижного носителя. Выходы каждого из четырех датчиков 55, 56, 57, 58 сигнала отрицательной обратной связи соединены соответственно с первым, вторым, третьим, четвертым входом узла 59 формирования массива сигналов отрицательной обратной связи, информационный выход которого соединен информационной линией связи 61 с первым информационным выходом системы управления 2 приводами четырех дифференциальных АДР подвижного носителя и далее с информационным десятым входом ЦВУ 4.
Устройство приведения зеркала антенны в поворотное движение в двух взаимно перпендикулярных плоскостях для осуществления заявленного способа управления и стабилизации подвижного носителя характеризуется тем, что оно конструктивно выполнено в виде единого модуля, вмонтированного в оболочку подвижного носителя, и содержит антенное устройство 3, основание 10 которого жестко установлено внутри модуля (фиг.9). При этом антенное устройство 3 включает в свой состав двухосный карданов подвес 7, ось 8 вращения наружной рамки 9 которого установлена на шарикоподшипниковых опорах 62 и 63 на основании 10 антенного устройства 3, а ось 11 вращения внутренней рамки 12 которого установлена на шарикоподшипниковых опорах 64 и 65 в наружной рамке 9. С одной стороны наружной рамки 9 установлен встроенный электродвигатель 13, а с другой стороны наружной рамки 9 соосно установлен встроенный датчик 15 угла поворота наружной рамки 9 так, что их роторы соответственно жестко закреплены на оси 8 вращения наружной рамки 9, а их статоры соответственно жестко закреплены в основании 10 антенного устройства 3. При этом с одной стороны внутренней рамки 12 установлен также встроенный электродвигатель 14, а с другой стороны внутренней рамки 12 соосно установлен встроенный датчик 16 угла поворота внутренней рамки 12 так, что их роторы соответственно жестко закреплены на оси 11 вращения внутренней рамки 12, а их статоры соответственно жестко закреплены в наружной рамке 9 двухосного карданова подвеса 7, во внутренней рамке 12 которого размещены управляемый трехстепенной гироскоп 17, гироскопический двухканальный датчик угловой скорости (ДУС) 18, три однокомпонентных измерителя линейного ускорения 19, 20, 21. На основании 10 антенного устройства 3 установлены электронные узлы 33 и 34 гиростабилизации и управления направлением зеркала 5 антенного устройства 3 по углу наклона и по азимуту соответственно. Для обеспечения приведения зеркала 5 в поворотное движение по углу наклона и по азимуту антенное устройство 3 также содержит двухстепенной шарнир 37, создающий возможность вращения зеркала 5 двух взаимно перпендикулярных плоскостях относительно облучателя 6, жестко закрепленного на основании 10 антенного устройства 3, две тяги 38 и 39 механического координатора антенного устройства 3, кулису 66, два шарнира Гука 67 и 68 для механического соединения кулисы 66 двумя тягами 38 и 39 соответственно с двумя шарнирами Гука 69 и 70, установленными на задней поверхности зеркала 5 антенного устройства 3 (фиг.9). Причем на входы узлов 33 и 34 гиростабилизации и управления направлением зеркала 5 антенного устройства 3 поступают сигналы с соответствующих выходов управляемого трехстепенного гироскопа 17, а с выходов этих узлов 33 и 34 сигналы поступают на соответствующие встроенные электродвигатели 13 и 14 для поворота соответственно наружной рамки 9 по углу наклона и поворота внутренней рамки 12 по азимуту двухосного карданова подвеса 7. Сигналы с выходов двухканального гироскопического ДУС 18 и трех однокомпонентных измерителей линейного ускорения 19, 20, 21, с выходов датчиков 15 и 16 угла поворота наружной рамки 9 по углу наклона и внутренней рамки 12 по азимуту поступают на соответствующие входы внешнего ЦВУ 4 БССН 1. На входы управляемого трехстепенного гироскопа 17 поступают с соответствующих выходов ЦВУ 4 сигналы управления направлением зеркала 5 антенного устройства 3.
Устройство приведения в действие дифференциальных аэродинамических рулей (АДР) подвижного носителя для осуществления заявленного способа управления и стабилизации подвижного носителя характеризуется тем, что оно содержит четыре независимых идентичных привода соответствующих дифференциальных АДР 45, 46, 47, 48 (фиг.10). Каждый привод конструктивно выполнен в виде единого модуля, жестко вмонтированного в оболочку подвижного носителя. При этом четыре дифференциальных АДР 45, 46, 47, 48 расположены попарно крестообразно на поверхности оболочки подвижного носителя и жестко связаны с соответствующими валами 73, 74, 75, 76 каждого привода, вращающимися на шарикоподшипниковых опорах 77 в корпусе 71 каждого привода. Причем одна пара противоположно расположенных соосно относительно центра вращения дифференциальных АДР валов 73 и 75 направлена вдоль по оси, перпендикулярной к оси, вдоль по которой направлена другая пара противоположно расположенных соосно валов 74 и 76. Внутри корпуса 71 каждого привода на соответствующем валу 73, 74, 75, 76 соосно установлены соответственно встроенные электродвигатели 51, 52, 53, 54 и встроенные датчики 55, 56, 57, 58 сигнала отрицательной обратной связи так, что ротор 72 каждого их встроенных электродвигателей 51, 52, 53, 54 и ротор 79 каждого из встроенных датчиков 55, 56, 57, 58 сигнала отрицательной обратной связи жестко закреплены на соответствующих валах 73, 74, 75, 76 каждого привода. Статор 78 каждого из встроенных электродвигателей 51, 52, 53, 54 и статор 80 каждого из встроенных датчиков 55, 56, 57, 58 сигнала отрицательной обратной связи жестко установлены соответственно на корпусе 71 каждого привода дифференциальных АДР 45, 46, 47, 48. При этом каждый из четырех встроенных электродвигателей 51, 52, 53, 54 приводов дифференциальных АДР 45, 46, 47, 48 через узел 50 формирования сигналов управления четырьмя электродвигателями 51, 52, 53, 54 и каждый из четырех датчиков 55, 56, 57, 58 сигнала отрицательной обратной связи через узел 59 формирования массива сигналов отрицательной обратной связи электрически соединены информационными линиями с ЦВУ 4 БССН 1.
Предлагаемые способ управления и стабилизации подвижного носителя, интегрированная система и устройства для его осуществления обеспечивают формирование сигналов управления и стабилизации подвижного носителя, а также и подвижного носителя, вращающегося по крену, вследствие того что система управления и стабилизации содержит двухосный карданов подвес 7 антенного устройства 3 (фиг.6 и фиг.7), кинематическая схема которого позволяет разместить во внутренней рамке 12 двухосного карданова подвеса 7, шарнирно связанного с зеркалом 5 антенного устройства 3, управляемый трехстепенной гироскоп 17, являющийся чувствительным и исполнительным элементом следящего гиропривода антенного устройства 3, а также одновременно чувствительным элементом инерциального измерения параметров вектора визирования заданного OB. При современной элементной базе на основе технологии изготовления микроэлектромеханических систем (МЭМС) функции гироскопического двухканального ДУС 18 могут быть выполнены двумя твердотельными однокомпонентными микромеханическими гироскопами (ММГ), а в качестве трех однокомпонентных измерителей линейного ускорения 19, 20, 21 могут быть использованы три твердотельных однокомпонентных микромеханических акселерометра (ММА), что позволяет разместить их соответствующим образом во внутренней рамке 12 двухосного карданова подвеса 7.
При перемещении подвижного носителя по сигналам указанных гироинерциальных датчиков 19, 20, 21, 17, 18, пропорциональным первичной информации о проекциях nx, ny, nz вектора  кажущегося ускорения движения и проекциях ωx, ωy, ωz вектора
кажущегося ускорения движения и проекциях ωx, ωy, ωz вектора  абсолютной угловой скорости поворота вектора
абсолютной угловой скорости поворота вектора  визированной заданного OB на оси базовой антенной системы координат Oxyz, реализуются в ЦВУ 4 алгоритмы (22), (23) инерциального измерения параметров вектора
визированной заданного OB на оси базовой антенной системы координат Oxyz, реализуются в ЦВУ 4 алгоритмы (22), (23) инерциального измерения параметров вектора  визирования заданного OB и на его выходе формируются сигналы, которые являются основой для формирования сигналов управления и стабилизации подвижного носителя (узел 49).
визирования заданного OB и на его выходе формируются сигналы, которые являются основой для формирования сигналов управления и стабилизации подвижного носителя (узел 49).
При реализации в ЦВУ 4 алгоритмов (22), (23) выполняется в замкнутом контуре инерциального автосопровождения заданного OB функция инерциального дискриминатора сигналов рассогласования (ошибки):
- по дальности ΔL между первоначально заданной наклонной дальностью Lo и счисляемым текущим значением наклонной дальности L сближения подвижного носителя с заданным OB;
- по направлению, т.е. составляющих e1 и е2 пространственной угловой координаты  заданного OB, между направлением оптической оси зеркала 5 антенного устройства 3 или, что то же самое, между направлением вектора кинетического момента
заданного OB, между направлением оптической оси зеркала 5 антенного устройства 3 или, что то же самое, между направлением вектора кинетического момента  ротора 22 управляемого трехстепенного гироскопа 17 и текущим направлением на заданный OB в базовой антенной системе координат Oxyz (фиг.2) в двух взаимно перпендикулярных плоскостях пеленгования, отсчитываемых относительно оптической оси Ох зеркала 5 антенного устройства.
ротора 22 управляемого трехстепенного гироскопа 17 и текущим направлением на заданный OB в базовой антенной системе координат Oxyz (фиг.2) в двух взаимно перпендикулярных плоскостях пеленгования, отсчитываемых относительно оптической оси Ох зеркала 5 антенного устройства.
Следовательно, сигналы рассогласования e1 и е2, а также ΔL имеют единую отсчетную базу и идентичны соответствующим сигналам рассогласования между направлением линии визирования антенны, т.е. максимума диаграммы направленности излучаемой электромагнитной энергии, и направлением на облучаемый зондирующими сигналами OB, определяемым угловым дискриминатором в замкнутых контурах радиолокационного автосопровождения OB по направлению, а также соответственно сигналу рассогласования, определяемому временным дискриминатором в замкнутом контуре радиолокационного автосопровождения OB по дальности.
Вследствие этого реализуется в интегрированной системе управления и стабилизации подвижного носителя, осуществляющей заявленный способ, оптимальная схема комплексирования информации соответственно угловых инерциального и радиолокационного дискриминаторов, а также информации инерциального дискриминатора и информации радиолокационного временного дискриминатора в комплексированных контурах автосопровождения OB. При этом обеспечивается существенное повышение динамической точности (приблизительно в 10 раз) за счет выполнения условия инвариантности динамической ошибки в интегрированной комплексированной БССН 1 к траекторным изменениям входного сигнала и ее помехоустойчивость за счет сужения полосы пропускания комплексированных контуров автосопровождения OB.
Кроме того, обеспечивается реализация в интегрированной системе управления и стабилизации подвижного носителя, осуществляющей заявленный способ, единого закона управления (50) на всей траектории перемещения подвижного носителя по направлению к OB.
В заявленном способе, интегрированной системе и устройствах для его осуществления решена задача инерциального управления направлением, стабилизированным от аддитивных короткопериодических возмущающих колебаний, зеркала 5 антенного устройства 3 при круговом вращении его основания 10 вместе с вращающимся по крену подвижным носителем.
При этом также решена задача формирования сигналов инерциального управления подвижным носителем антенного устройства 3 БССН 1, вращающимся по крену и перемещающимся по траектории, определяемой предстартовым назначением OB и начальными условиями выставки инерциального измерения параметров вектора визирования заданного OB.
Одновременно обеспечивается стабилизация направления зеркала 5 антенного устройства 3 на OB при круговом вращении основания 10 антенного устройства 3, установленного жестко внутри корпуса вращающегося по крену подвижного носителя. Это достигается вследствие того, что предложенная кинематическая схема (фиг.6, фиг.7) антенного устройства 3 реализует свойство двухосного карданова подвеса 7 (фиг.6) при круговом вращении основания 10 антенного устройства 3 преобразовывать это вращение в два ортогональных колебания наружной 9 и внутренней 12 рамок двухосного карданова подвеса 7, сдвинутых по фазе на 90 градусов. При этом информация управляемого трехстепенного гироскопа 17, установленного во внутренней рамке 12 двухосного карданова подвеса 7, а также узлы 33 и 34 гиростабилизации и управления направлением зеркала 5 антенного устройства 3 на заданный OB соответственно по углу наклона и по азимуту и устройство приведения зеркала 5 антенны в поворотное движение в двух взаимно перпендикулярных плоскостях, осуществляющее заявленный способ управления и стабилизации подвижного носителя, обеспечивают при круговом вращении основания 10 антенного устройства 3 вместе с вращающимся по крену подвижным носителем удержание (стабилизацию) задаваемого направления вектора (линии) визирования на заданный OB при наличии колебаний подвижного носителя по тангажу и по рысканию.
Указанная стабилизация при необходимости обеспечивается одновременно с торможением вращения по крену подвижного носителя, причем с одновременным формированием сигналов управления и стабилизации подвижного носителя с подачей их на соответствующие входы устройства приведения в действие дифференциальных АДР подвижного носителя, осуществляющего способ управления и стабилизации подвижного носителя.
Таким образом, в предлагаемой интегрированной системе управления и стабилизации подвижного носителя, реализующей заявленный способ, на основе инерциального измерения параметров вектора визирования заданного OB решена задача инерциального управления направлением, стабилизированным от аддитивных короткопериодических возмущающих колебаний, вектора (линии) визирования антенного устройства при круговом вращении его основания вместе с вращающимся по крену подвижным носителем. При этом решается задача управления и стабилизации подвижного носителя на всей траектории его движения в направлении заданной OB.
В устройстве приведения зеркала антенны в поворотное движение в двух взаимно перпендикулярных плоскостях и в устройстве приведения в действие дифференциальных АДР подвижного носителя исполнительные элементы (соответственно двухосный карданов подвес антенного устройства, несущий во внутренней рамке акселерометры и гироприборы, и дифференциальные АДР), соответствующие электродвигатели и датчики угла отработки закреплены и расположены на одной оси и соответственно на одном валу привода АДР. Вследствие этого ошибки положения минимальны и определяются конструктивно только эксцентриситетами осей и валов при практически ограниченных углах поворота исполнительных элементов.
Устройство приведения зеркала антенны в поворотное движение в двух взаимно перпендикулярных плоскостях и устройство приведения в действие дифференциальных АДР подвижного носителя для осуществления заявленного способа конструктивно выполнены в виде модулей, жестко вмонтированных в оболочку подвижного носителя. При этом электромеханические узлы упомянутых устройств сконструированы на основе синхронных электродвигателей встраиваемого исполнения с постоянными магнитами на роторе серии ДБМ (двигатели бесконтактные моментные) и датчиков угла поворота осей рамок двухосного карданова подвеса устройства приведения зеркала антенны в поворотное движение в двух взаимно перпендикулярных плоскостях и датчиков угла поворота валов устройства приведения в действие дифференциальных АДР подвижного носителя.
Предлагаемые устройство приведения зеркала антенны в поворотное движение в двух взаимно перпендикулярных плоскостях и устройство приведения в действие дифференциальных АДР подвижного носителя обеспечивают возможность применения в качестве датчиков положения ротора упомянутых выше электродвигателей вращающиеся трансформаторы типа редуктосин, или пристраиваемые датчики типа ПИМ, или фотодатчики, или кодовые датчики любого типа.
Предлагаемые устройства приведения, осуществляющие завяленный способ, обеспечивают также следующие возможности:
- встраиваемости элементов, исключения зазоров и кинематических ошибок;
- их интенсивного использования (т.е. отсутствия номинальных режимов, длительного функционирования в любом режиме, непрерывного и при необходимости дискретного управления, неограниченной частоты реверса и момента инерции нагрузки);
- многофункциональности (т.е. работы в режимах управления синхронным и при необходимости шаговым и вентильным двигателем);
- модульного принципа построения;
- применения в безредукторных системах управления;
- повышения жесткости и резонансной частоты;
- высокой линейности и быстродействия;
- уменьшения износа;
- снижения шума;
- соосной установки нескольких электродвигателей и датчиков угла поворота выходной оси или вала, а также датчиков сигнала отработки и обратной связи в системе управления;
- введения тахометрической обратной связи без отдельного тахогенератора;
- единого информационного обеспечения от датчика угла обратной связи;
- устранения регламентных работ;
- снижения стоимости изготовления и эксплуатации.
Кроме того, предлагаемые устройства обеспечивают осуществление заявленного способа вследствие высокоточных и быстродействующих отработки сигналов управления и стабилизации направления линии (вектора) визирования заданного OB и отработки сигналов управления и стабилизации подвижного носителя с одновременным регулированием скорости поворота осей и валов с высокой точностью.
Устройство приведения в действие дифференциальных АДР подвижного носителя содержит четыре независимых идентичных привода соответствующих дифференциальных АДР. Каждый привод конструктивно выполнен в виде единого модуля, жестко вмонтирован в оболочку головного отсека подвижного носителя. Вследствие этого обеспечивается реализация конструкторских решений на основе магистрально-модульного принципа практического осуществления заявленного способа. При этом решается задача оптимальной конструктивной компоновки по минимально возможным массогабаритным характеристикам и удобство эксплуатации системы и устройств, осуществляющих заявленный способ, в предельно ограниченном объеме головного отсека подвижного носителя.
Достоинством заявленного технического решения является исключение необходимости использования в комплексе бортового аппаратного оснащения подвижного носителя дорогостоящих традиционной системы инерциальной навигации (в том числе и бесплатформенной) и радиовысотомера, вследствие чего освобождается существенный объем (штатный отсек управления) подвижного носителя.
Результаты проведенных исследований и математического моделирования подтверждают реализуемость заявленного способа, системы и устройств для его осуществления и достижение положительного эффекта:
- обеспечение повышенной точности инерциального управления направлением зеркала антенны на первоначально заданный OB на автономном участке самонаведения подвижного носителя,
- высокоточное самонаведение подвижного носителя на заданный OB, в том числе вращающегося по крену,
- минимально возможные массогабаритные характеристики аппаратуры системы управления и стабилизации, предназначенной для оснащения подвижных носителей различного назначения.
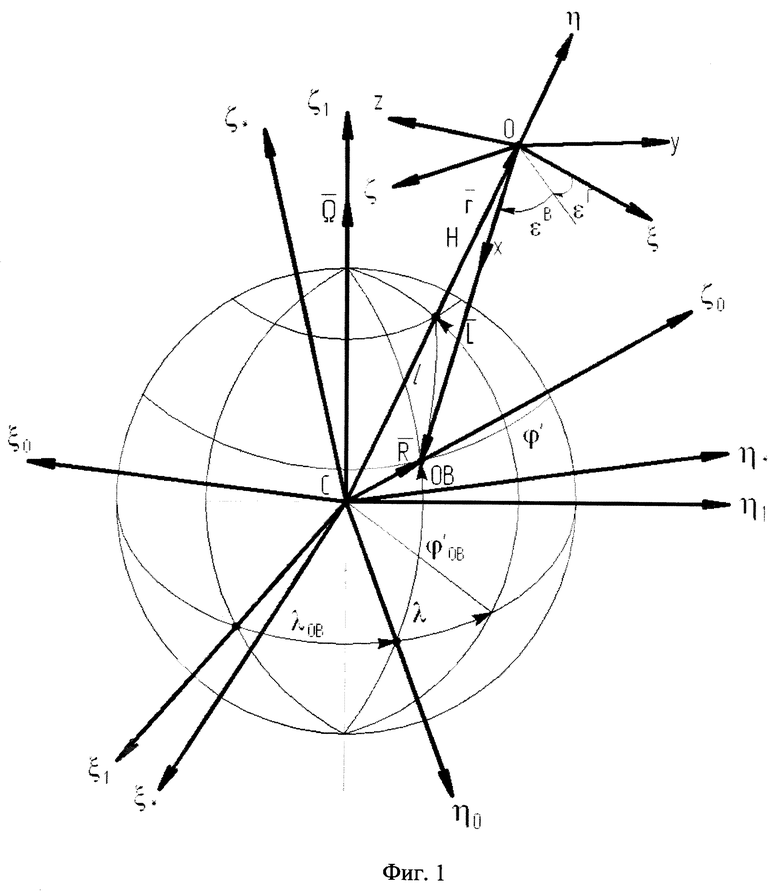
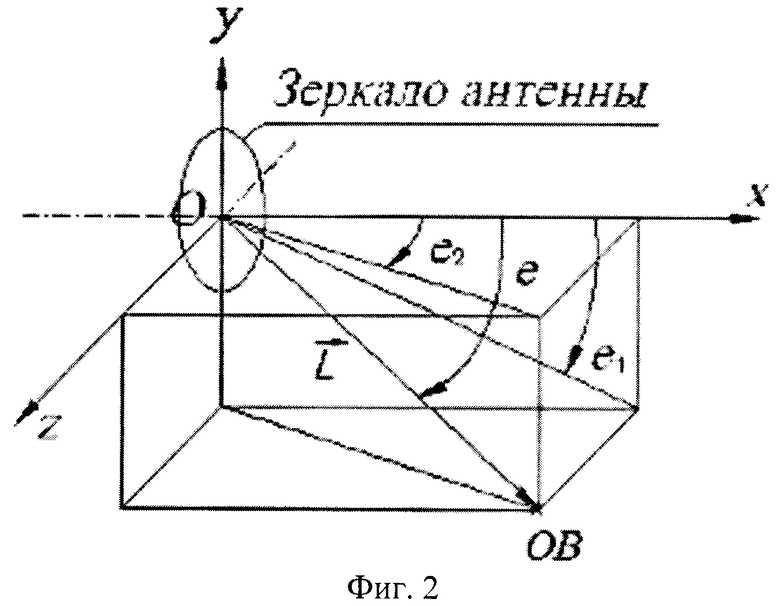
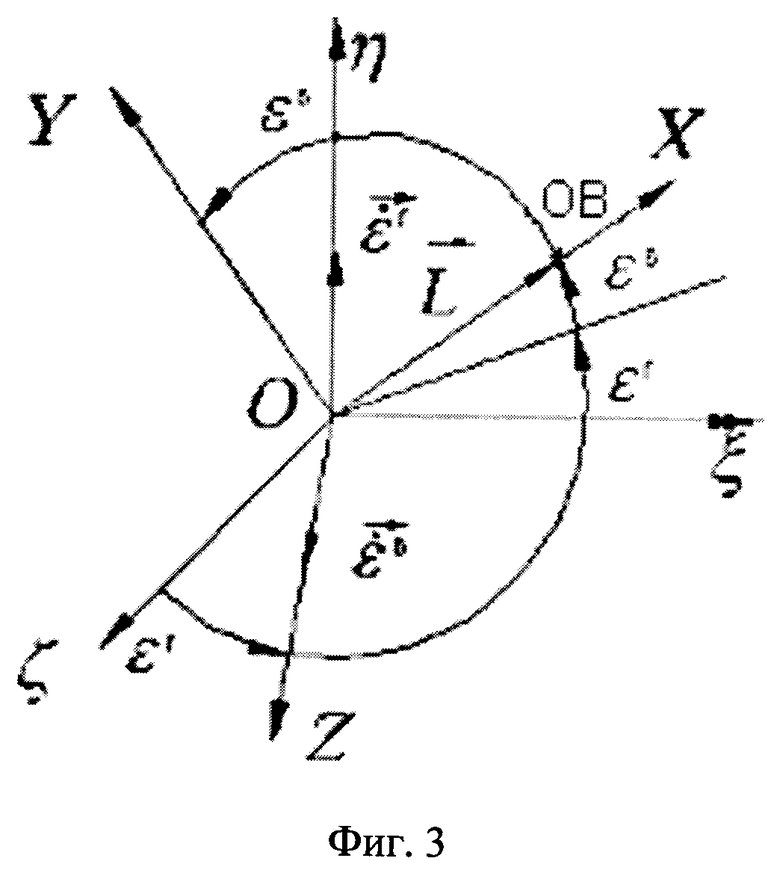
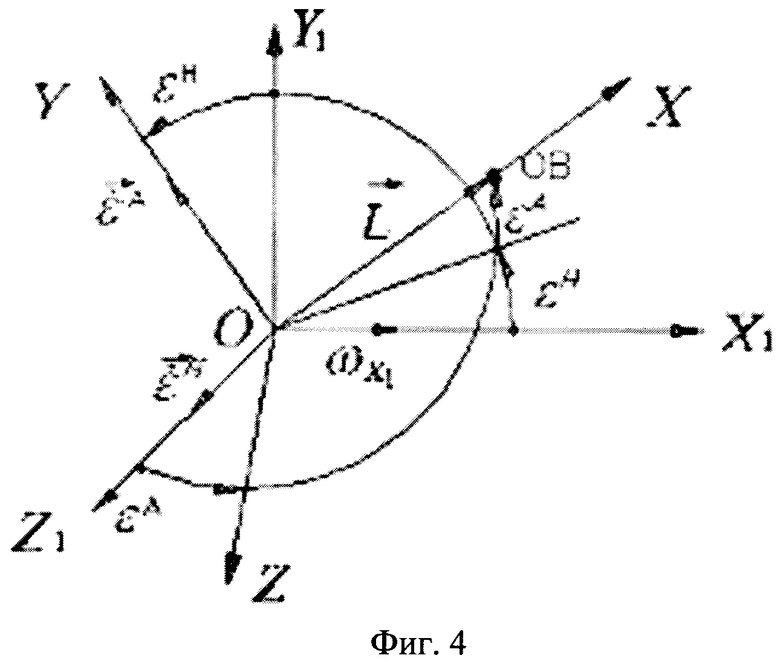
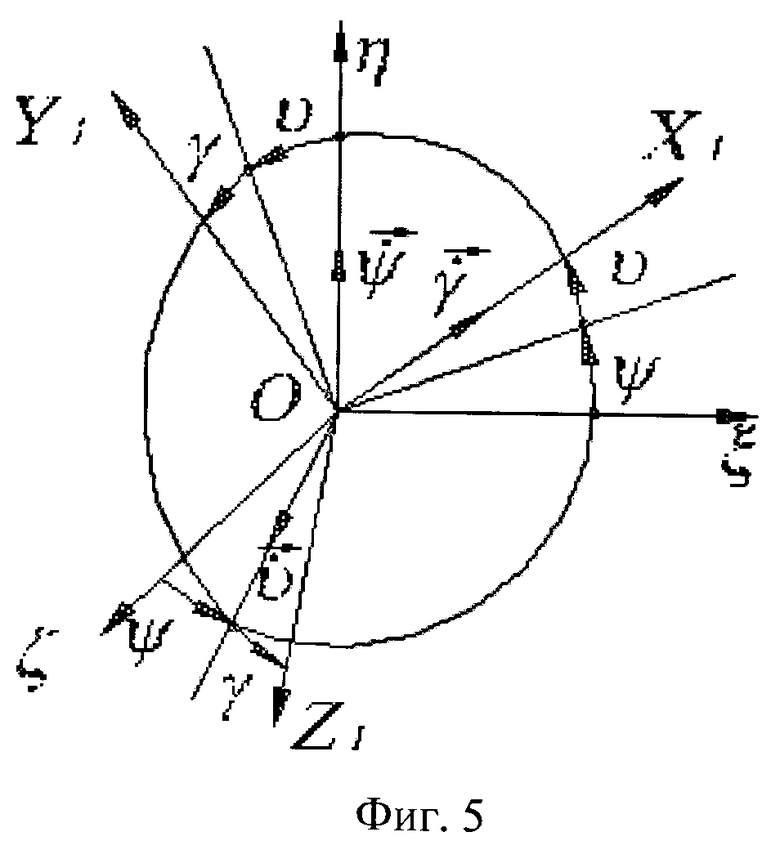
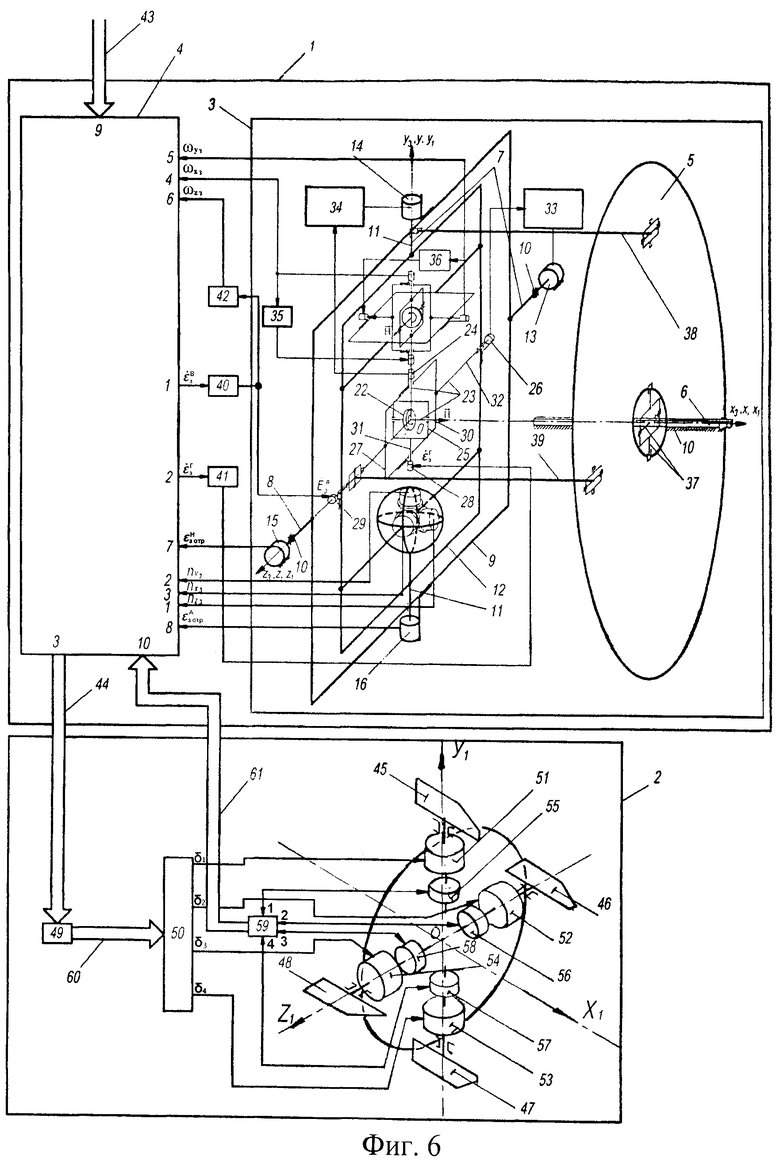
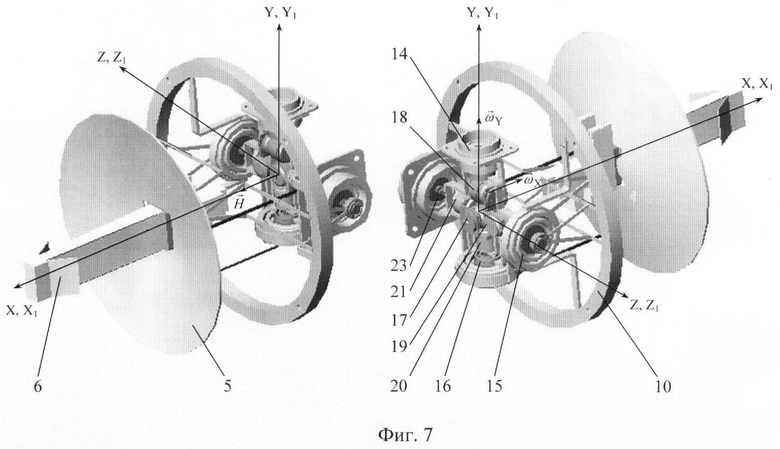
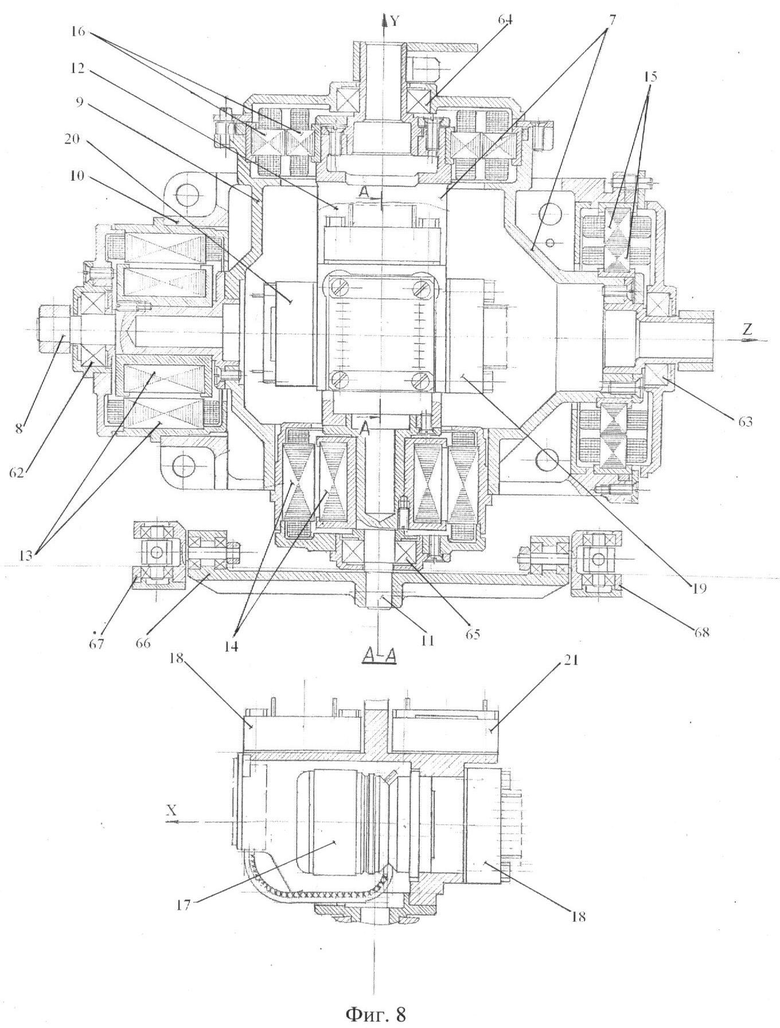
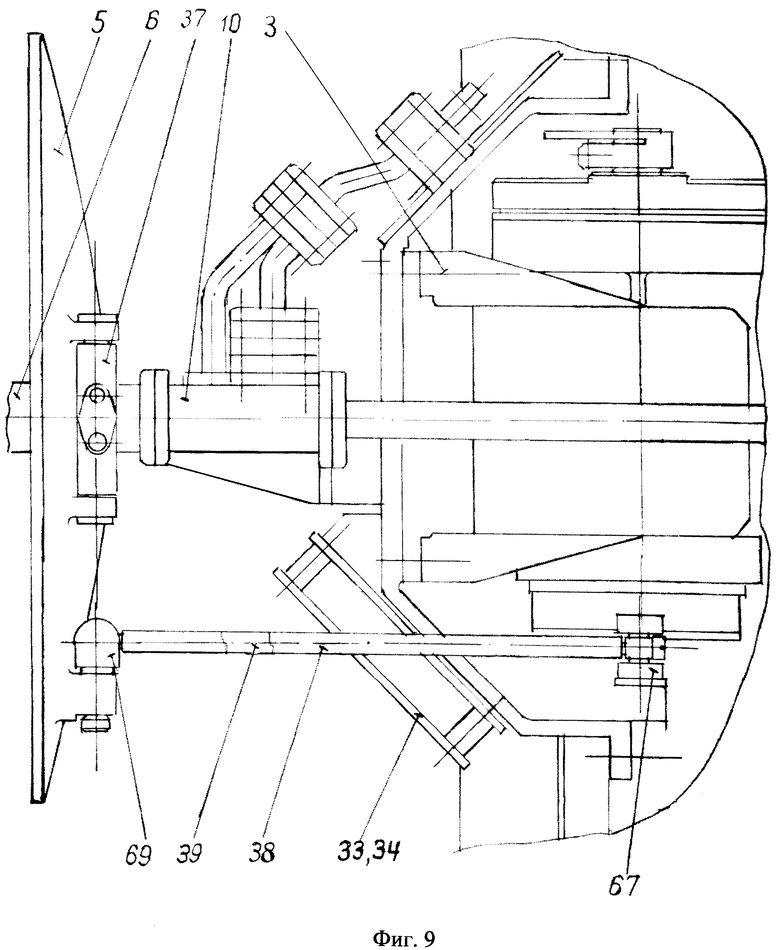

Изобретение относится к системам управления, стабилизации и высокоточного самонаведения подвижного носителя на заданный объект визирования (ОВ), содержащим устройства с изменяющейся ориентацией диаграммы направленности волн, излучаемых антенной. Сущность изобретения заключается в том, что по заданным начальным координатам взаимного положения подвижного носителя и ОВ и начальным условиям выставки инерциальной измерительной системы, а также по измеряемым с момента старта подвижного носителя проекциям вектора кажущегося ускорения движения и проекциям вектора абсолютной угловой скорости вектора визирования заданного ОВ на соответствующие оси базовой антенной системы координат формируют сигналы, пропорциональные текущим значениям параметров вектора визирования заданного ОВ. Заявленное изобретение обеспечивает высокоточную отработку сформированных сигналов и помехоустойчивость управления и стабилизации направления вектора визирования ОВ и сигналов управления и стабилизации подвижного носителя с одновременным регулированием скорости поворота осей и валов соответственно устройства приведения зеркала антенны в поворотное движение в двух взаимно перпендикулярных плоскостях и устройства приведения в действие дифференциальных аэродинамических рулей (АДР) подвижного носителя. 4 н.п. ф-лы, 10 ил.
1. Способ управления и стабилизации подвижного носителя, характеризующийся тем, что формируют длиннопериодические управляющие сигналы, пропорциональные начальным и текущим значениям углов визирования заданного объекта визирования (ОВ) в горизонтальной плоскости и в вертикальной плоскости и скорости их изменения, а также сигналы, пропорциональные текущим значениям модуля скорости изменения наклонной дальности сближения с заданным ОВ подвижного носителя системы управления и стабилизации, для чего во время предстартовой подготовки подвижного носителя определяют и задают сигналы, пропорциональные начальным координатам взаимного положения подвижного носителя и первоначально заданного ОВ, затем формируют сигналы в виде пакета последовательных информационных слов, содержащего начальные значения углов наклона и азимута заданного ОВ относительно основания антенного устройства, жестко установленного внутри корпуса подвижного носителя, в связанной с центром масс подвижного носителя системе координат, наклонной дальности до заданного ОВ и наклонной скорости сближения с заданным ОВ основания антенного устройства вместе с подвижным носителем в предстартовом его положении, рыскания, тангажа и крена подвижного носителя вместе с основанием антенного устройства, а также начальные условия выставки инерциального измерения параметров вектора визирования заданного ОВ, т.е. сигналы, пропорциональные начальным значениям проекций вектора линейной скорости предстартового перемещения основания антенного устройства вместе с подвижным носителем на соответствующие оси местной горизонтальной системе координат, декартовых координат подвижного носителя в местной горизонтальной системе координат, долготы и географической широты подвижного носителя, а также сигналы, пропорциональные необходимым режимным параметрам по дальности, контрольное слово, командное слово, далее проверяют сформированные сигналы в виде пакета последовательных информационных слов на отсутствие в них искажений, после чего сигналы, характеризующие пакет последовательных информационных слов, преобразуют в параллельную форму для инерциального измерения параметров вектора визирования заданного ОВ, затем преобразуют сигналы, пропорциональные заданным начальным условиям выставки инерциального измерения параметров вектора визирования заданного ОВ, в сигналы, пропорциональные начальным значениям проекции вектора линейной скорости предстартового перемещения основания антенного устройства вместе с подвижным носителем на соответствующие оси базовой антенной системы координат, углов визирования заданного ОВ соответственно в горизонтальной плоскости и в вертикальной плоскости в местной горизонтальной системе координат, составляющих пространственной угловой координаты заданного ОВ в базовой антенной системе координат, направляющих косинусов, определяющих взаимное положение базовой антенной системы координат и опорной геоцентрической системы координат, связанной одной своей осью с заданным ОВ, расположенным на земной поверхности; в момент времени старта подвижного носителя обновление сигналов начальной информации прекращают, а во время его движения по траектории после старта измеряют сигналы, пропорциональные проекциям вектора кажущегося линейного ускорения движения и проекциям вектора абсолютной угловой скорости поворота зеркала антенного устройства на соответствующие оси системы координат, связанной с зеркалом антенного устройства, по этим измеренным сигналам с учетом переменной электрической редукции между углами поворота зеркала антенного устройства и вектора визирования заданного ОВ определяют сигналы, пропорциональные проекциям вектора кажущегося линейного ускорения движения и проекциям вектора абсолютной угловой скорости поворота вектора визирования заданного ОВ на соответствующие оси базовой антенной системы координат, формируют по полученным сигналам с учетом сигналов, определенных и заданных во время предстартовой подготовки подвижного носителя, сигналы, пропорциональные текущим значениям параметров вектора визирования заданного ОВ, а именно проекций вектора линейной скорости сближения с заданным ОВ основания антенного устройства вместе с подвижным носителем на соответствующие оси базовой антенной системы координат, наклонной дальности и наклонной скорости сближения с заданным ОВ основания антенного устройства вместе с подвижным носителем, составляющих пространственной угловой координаты заданного ОВ в базовой антенной системе координат, направляющих косинусов взаимного текущего углового положения базовой антенной системы координат и опорной геоцентрической системы координат, осуществляют по полученным сигналам, пропорциональным текущим значениям разницы между начальным значением наклонной дальности до заданного ОВ и текущим значением наклонной дальности сближения подвижного носителя с заданным ОВ вместе с основанием антенного устройства, инерциальное автосопровождение заданного ОВ по дальности, а по полученным сигналам, пропорциональным текущим значениям составляющих пространственной угловой координаты заданного ОВ в базовой антенной системе координат, которые являются сигналами рассогласования между направлением оптической оси зеркала антенного устройства и направлением на заданный ОВ в двух соответствующих взаимно перпендикулярных плоскостях пеленгования в базовой антенной системе координат, осуществляют инерциальное автосопровождение по направлению заданного ОВ, назначенного при предстартовой подготовке подвижного носителя, для чего преобразуют путем интегрирования в замкнутом контуре инерциального автосопровождения по направлению заданного ОВ полученные сигналы, пропорциональные текущим значениям составляющих пространственной угловой координаты заданного ОВ, в управляющие длиннопериодические сигналы, пропорциональные соответственно скорости изменения углов визирования заданного ОВ, определяющих текущее направление зеркала антенного устройства на заданный ОВ в горизонтальной и в вертикальной плоскости, обусловленных перемещением основания антенного устройства вместе с подвижным носителем или с вращающимся по крену подвижным носителем по направлению к заданному ОВ, которыми воздействуют на соответствующие датчики момента управляемого трехстепенного гироскопа, установленного во внутренней рамке двухосного карданова подвеса антенного устройства, наружная и внутренняя рамки которого шарнирно связаны с его зеркалом, под действием этих длиннопериодических сигналов создают длиннопериодические возмущающие управляющие моменты, вызывающие моменты гироскопической реакции в опорах осей прецессии соответствующих рамок трехосного карданова подвеса ротора гироскопа, при этом возникает длиннопериодическое прецессионное отклонение соответствующих рамок трехосного карданова подвеса ротора гироскопа с угловой скоростью, близкой по величине к угловой скорости изменения соответствующих углов визирования заданного ОВ, одновременно определяют сигналы, пропорциональные рассогласованию между направлением вектора кинетического момента ротора гироскопа и направлением на заданный ОВ, задаваемым сформированными длиннопериодическими сигналами, пропорциональными скорости изменения углов визирования заданного ОВ в горизонтальной и в вертикальной плоскости и соответственно длиннопериодическим возмущающим управляющим моментам; эти сигналы преобразуют в длиннопериодические сигналы управления электродвигателями поворота рамок двухосного карданова подвеса антенного устройства, а по сигналам управления электродвигатели развивают длиннопериодические поворотные моменты, равные и совпадающие по направлению с направлением соответствующих длиннопериодических возмущающих управляющих моментов, для поворота наружной и внутренней рамок двухосного карданова подвеса антенного устройства и шарнирно связанного с ним зеркала в текущее направление на заданный ОВ; при этом одновременно определяют сигналы, пропорциональные соответственно углу наклона и азимуту заданного ОВ относительно основания антенного устройства, также одновременно формируют сигналы, характеризующиеся амплитудой и частотой короткопериодических колебаний, сдвинутых по фазе на 90°, наружной и внутренней рамок двухосного карданова подвеса антенного устройства и шарнирно связанного с ним зеркала относительно своих осей вращения, и короткопериодические сигналы, пропорциональные колебаниям основания антенного устройства вместе с колебаниями подвижного носителя по рысканию и по тангажу, которые воздействуют на основание антенного устройства при одновременном его вращении по крену вместе с подвижным носителем, вызывающие аддитивные короткопериодические возмущающие моменты, которые, в свою очередь, вызывают короткопериодические моменты гироскопической реакции в опорах осей прецессии соответствующих рамок трехосного карданова подвеса ротора гироскопа, при этом возникает короткопериодическое прецессионное колебание соответствующих рамок карданова подвеса ротора гироскопа с угловыми скоростями, направление вектора которого совпадает с направлением вектора аддитивных короткопериодических возмущающих моментов, одновременно определяют сигналы, пропорциональные рассогласованию между направлением вектора кинетического момента ротора гироскопа и направлением вектора аддитивных короткопериодических возмущающих моментов, эти сигналы преобразуют в аддитивные короткопериодические сигналы управления соответствующих электродвигателей поворота рамок двухосного карданова подвеса антенного устройства, по сигналам управления электродвигатели развивают аддитивные короткопериодические вращающие моменты, равные и противоположно направленные соответственно направлению аддитивных короткопериодических возмущающих моментов, действующих вокруг соответствующих осей вращения наружной и внутренней рамок двухосного карданова подвеса антенного устройства, для отработки аддитивных короткопериодических сигналов, обусловленных вращением основания антенного устройства вместе с вращающимся по крену подвижным носителем и колебаниями их по рысканию и по тангажу, в текущем направлении на заданный ОВ с одновременной отработкой сигналов, пропорциональных угловой скорости короткопериодических отклонений рамок двухосного карданова подвеса антенного устройства, при этом отработанные аддитивные короткопериодические сигналы регистрируют и по этим короткопериодическим сигналам, характеризующимся амплитудой и частотой короткопериодических колебаний рамок двухосного карданова подвеса антенного устройства, определяют сигнал, пропорциональный периоду колебаний рамок двухосного карданова подвеса антенного устройства, по которому в течение всего времени вращения по крену подвижного носителя антенного устройства определяют сигнал, пропорциональный величине угловой скорости вращения по крену подвижного носителя, и одновременно при необходимости формируют по зарегистрированным сигналам короткопериодические сигналы торможения вращения, сдвинутые по фазе на 90°, подвижного носителя по крену, которые преобразуют в управляющие сигналы и подают на входы приводов соответствующих четырех аэродинамических рулей, осуществляющих управление подвижным носителем относительно его двух взаимно перпендикулярных осей симметрии, которые по этим сигналам развивают короткопериодические вращающие моменты торможения, равные и противоположно направленные соответственно аддитивным короткопериодическим возмущающим моментам, обусловленным вращением по крену подвижного носителя антенного устройства, а при торможении вращения по крену подвижного носителя, когда сигнал, пропорциональный периоду короткопериодических колебаний рамок двухосного карданова подвеса антенного устройства превышает пороговое значение периода, соответствующее величине угловой скорости вращения по крену подвижного носителя, близкой к нулю, определяют сигнал остановки вращения по крену подвижного носителя антенного устройства, при этом одновременно определяют сигналы, пропорциональные углу наклона и азимуту заданного ОВ, а после остановки вращения по крену подвижного носителя одновременно осуществляют стабилизацию текущего направления зеркала антенного устройства на заданный ОВ от действующих короткопериодических колебаний подвижного носителя относительно своего центра масс по крену, по тангажу и по рысканию, при этом по сформированным длиннопериодическим управляющим сигналам, пропорциональным скорости изменения углов визирования заданного ОВ, определяют стабилизированное от аддитивных короткопериодических колебаний текущее направление зеркала антенного устройства на заданный ОВ в горизонтальной плоскости и в вертикальной плоскости и также осуществляют инерциальное управление стабилизированным направлением зеркала антенного устройства на заданный ОВ при круговом вращении основания антенного устройства вместе с вращающимся по крену подвижным носителем, одновременно по сигналам, пропорциональным полученным значениям проекций вектора абсолютной угловой скорости поворота вектора визирования заданного ОВ на соответствующие оси базовой антенной системы координат, формируют сигналы, пропорциональные проекциям вектора абсолютной угловой скорости поворота вектора визирования заданного ОВ на соответствующие оси связанной системы координат, затем по этим сигналам формируют сигналы, пропорциональные проекциям вектора углового ускорения поворота вектора визирования заданного ОВ на соответствующие оси связанной системы координат, а также с учетом начальных значений крена, тангажа и рыскания, заданных при предстартовой подготовке подвижного носителя к пуску, определяют короткопериодические сигналы, пропорциональные текущим значениям крена, тангажа, рыскания и соответственно угловой скорости их изменения, далее по полученным сигналам формируют короткопериодические сигналы стабилизации подвижного носителя в вертикальной плоскости, в горизонтальной плоскости и по крену, по которым формируют короткопериодические сигналы, пропорциональные стабилизирующим моментам, которые поступают на вход каждого широкополосного контура стабилизации системы управления соответствующих четырех приводов дифференциальных аэродинамических рулей подвижного носителя, кроме того, одновременно по сигналам, пропорциональным полученным проекциям вектора кажущегося линейного ускорения движения вектора визирования заданного ОВ на соответствующие оси базовой антенной системы координат, формируют сигналы, пропорциональные проекциям вектора кажущегося линейного ускорения движения вектора визирования заданного ОВ на соответствующие оси местной горизонтальной системы координат, а также по полученным сигналам, пропорциональным текущим значениям вектора модуля скорости изменения наклонной дальности сближения с заданным ОВ основания антенного устройства вместе с подвижным носителем, начальным и текущим значениям углов визирования заданного ОВ в горизонтальной и в вертикальной плоскости и скорости их изменения, формируют управляющие сигналы самонаведения подвижного носителя на заданный ОВ, пропорциональные задаваемым перегрузкам соответственно в вертикальной и в горизонтальной плоскости, одновременно по полученным сигналам, пропорциональным измеренным проекциям вектора кажущегося линейного ускорения движения вектора визирования заданного ОВ на соответствующие оси базовой антенной системы координат, формируют сигналы, пропорциональные проекциям вектора кажущегося линейного ускорения движения вектора визирования заданного ОВ на соответствующие оси местной горизонтальной системы координат, затем сигналы, пропорциональные задаваемым перегрузкам, сравнивают соответственно с сигналами, сформированными по сигналам, пропорциональным проекциям вектора кажущегося линейного ускорения движения вектора визирования заданного ОВ на вертикальную и горизонтальную боковую ось местной горизонтальной системы координат, далее полученные сигналы, пропорциональные результату сравнения, преобразуют в управляющие длиннопериодические сигналы, которые поступают на вход узкополосных контуров управления соответствующих четырех приводов дифференциальных аэродинамических рулей подвижного носителя, где их суммируют соответственно с сформированными короткопериодическими сигналами, пропорциональными стабилизирующим моментам, полученные сигналы преобразуют в электрические сигналы управления и стабилизации подвижного носителя, усиливают их по мощности для управления соответствующими четырьмя дифференциальными аэродинамическими рулями подвижного носителя для отработки этих сигналов, при этом формируют массив сигналов обратной связи, которые вычитают из суммы массивов сформированных короткопериодических сигналов, пропорциональных стабилизирующим моментам, и соответственно сигналов, полученных сравнением сигналов, пропорциональных задаваемым перегрузкам в вертикальной и в горизонтальной плоскости, соответственно с сигналами, пропорциональными вертикальной и горизонтальной составляющей вектора кажущегося линейного ускорения движения подвижного носителя.
2. Интегрированная система управления и стабилизации подвижного носителя, осуществляющая способ по п.1, характеризующаяся тем, что включает в свой состав интегрированную бортовую систему самонаведения (БССН) и интегрированную систему управления приводами четырех дифференциальных аэродинамических рулей (АДР) подвижного носителя, при этом БССН содержит антенное устройство и цифровое вычислительное устройство, причем антенное устройство включает в свой состав зеркало с облучателем и волноводно-коммутирующим устройством, двухосный карданов подвес, ось вращения наружной рамки которого установлена на основании антенного устройства, а ось вращения внутренней рамки установлена в наружной рамке перпендикулярно к ее оси вращения, электродвигатель поворота наружной рамки двухосного карданова подвеса и электродвигатель поворота внутренней рамки двухосного карданова подвеса, датчик угла поворота наружной рамки двухосного карданова подвеса, датчик угла поворота внутренней рамки двухосного карданова подвеса соответственно по углу наклона и по азимуту, а также управляемый трехстепенной гироскоп, двухканальный гироскопический датчик угловой скорости, три однокомпонентных измерителя соответствующих проекций кажущегося линейного ускорения, причем управляемый трехстепенной гироскоп установлен во внутренней рамке двухосного карданова подвеса антенного устройства так, что направление кинетического момента его ротора в заарретированном положении гироскопа совпадает с нулевым направлением линии визирования антенного устройства, гироскоп содержит трехосный карданов подвес ротора, датчик угла прецессии внутренней рамки трехосного карданова подвеса ротора и датчик угла прецессии наружной рамки трехосного карданова подвеса ротора гироскопа, датчик момента управления направлением поворота внутренней рамки трехосного карданова подвеса ротора гироскопа, датчик момента управления направлением поворота наружной рамки трехосного карданова подвеса ротора гироскопа, при этом ось собственного вращения ротора гироскопа установлена во внутренней рамке трехосного карданова подвеса ротора гироскопа, ось вращения которой установлена в наружной рамке трехосного карданова подвеса ротора гироскопа, ось вращения которой, в свою очередь, установлена в корпусе гироскопа, а корпус гироскопа жестко закреплен во внутренней рамке двухосного карданова подвеса антенного устройства, на соответствующих осях вращения рамок карданова подвеса ротора установлены соответственно датчики угла прецессии внутренней рамки и наружной рамки трехосного карданова подвеса ротора гироскопа, антенное устройство также включает в свой состав узел гиростабилизации и управления направлением зеркала антенного устройства на объект визирования по углу наклона, узел гиростабилизации и управления направлением зеркала антенного устройства на объект визирования по азимуту, а также усилители сигналов обратной связи в соответствующих каналах двухканального гироскопического датчика измерения составляющих вектора абсолютной угловой скорости поворота зеркала антенного устройства, двухканальный гироскопический датчик угловой скорости (ДУС) установлен во внутренней рамке двухосного карданова подвеса антенного устройства так, что в заарретированном положении одна из его осей чувствительности совпадает с нулевым направлением линии визирования антенного устройства, а другая его ось чувствительности ориентирована, например, вверх вдоль положительного направления оси вращения внутренней рамки двухосного карданова подвеса антенного устройства, при этом направление вектора кинетического момента ротора гироскопического ДУС совпадает с положительным направлением оси вращения наружной рамки двухосного карданова подвеса антенного устройства, все три однокомпонентных измерителя соответствующих проекций кажущегося линейного ускорения установлены во внутренней рамке двухосного карданова подвеса антенного устройства так, что ось чувствительности одного из них взаимно ортогональна по отношению к взаимно ортогональным осям чувствительности двух других однокомпонентных измерителей соответствующих проекций кажущегося линейного ускорения, при этом ось чувствительности одного из трех однокомпонентных измерителей соответствующих проекций кажущегося линейного ускорения совпадает в заарретированном положении с нулевым положением линии визирования антенного устройства, выходы соответствующих датчиков угла прецессии внутренней рамки и наружной рамки трехосного карданова подвеса ротора управляемого трехстепенного гироскопа соответственно соединены с входом узлов гиростабилизации и управления направлением зеркала антенного устройства на заданный ОВ по углу наклона и по азимуту, выходы которых, в свою очередь, соединены соответственно с электродвигателями поворота наружной рамки и внутренней рамки двухосного карданова подвеса антенного устройства, при этом выходы датчиков угла прецессии внутренней и наружной рамки трехосного карданова подвеса ротора гироскопического ДУС соединены соответственно с входом усилителей сигналов отрицательной обратной связи, выходы которых соединены соответственно с датчиками момента внутренней и наружной рамок гироскопического ДУС, зеркало антенного устройства выполнено с возможностью поворота в двух взаимно перпендикулярных плоскостях с помощью двухстепенного шарнира относительно центра излучения облучателя, жестко закрепленного на основании антенного устройства, при этом зеркало шарнирно соединено тягами механического координатора антенного устройства соответственно с наружной рамкой и с внутренней рамкой двухосного карданова подвеса антенного устройства так, что расстояние между каждым из шарниров тяг на задней поверхности зеркала и его центром вращения равно расстоянию между каждым из шарниров, установленных соответственно на наружной рамке и на внутренней рамке двухосного карданова подвеса антенного устройства, и центром вращения этих рамок, антенное устройство включает в свой состав также узел формирования управляющего сигнала, пропорционального задаваемой угловой скорости поворота зеркала в вертикальной плоскости, и узел формирования управляющего сигнала, пропорционального задаваемой угловой скорости поворота зеркала в горизонтальной плоскости, и, кроме того, узел масштабирования сигнала, вход которого соеденен с выходом узла формирования управляющего сигнала задаваемой угловой скорости поворота зеркала в вертикальной плоскости и с входом датчика момента управления направлением поворота наружной рамки трехосного карданова подвеса ротора гироскопа, при этом выходы трех однокомпонентных измерителей соответствующих проекций вектора кажущегося линейного ускорения движения вектора визирования соответственно соединены с первым, вторым и третьим входами цифрового вычислительного устройства (ЦВУ), выходы двухканального гироскопического ДУС и выход узла масштабирования сигнала соединены соответственно с четвертым, пятым и шестым входами ЦВУ, выход датчика угла поворота наружной рамки и выход датчика угла поворота внутренней рамки двухосного карданова подвеса соответственно по углу наклона и по азимуту соединены с седьмым входом и с восьмым входом ЦВУ соответственно, первый и второй выход которого соединен соответственно с входом узла формирования управляющего сигнала, пропорционального задаваемой угловой скорости поворота зеркала антенного устройства в вертикальной плоскости, и с входом узла формирования управляющего сигнала, пропорционального задаваемой угловой скорости поворота зеркала антенного устройства в горизонтальной плоскости, кроме того, информационная линия связи соединяет аппаратуру, внешнюю по отношению к заявляемой системе, с девятым входом ЦВУ, при этом система управления четырех дифференциальных АДР подвижного носителя содержит узел формирования массива сигналов управления и стабилизации подвижного носителя, узел формирования сигналов дифференциального управления четырьмя электродвигателями поворота соответствующих дифференциальных АДР подвижного носителя, четыре датчика сигналов отрицательной обратной связи, узел формирования массива сигналов отрицательной обратной связи, причем информационный вход узла формирования массива сигналов управления и стабилизации подвижного носителя соединен информационной линией связи с информационным третьим выходом ЦВУ, информационный выход узла формирования массива сигналов управления и стабилизации подвижного носителя соединен информационной линией связи с информационным входом узла формирования сигналов дифференциального управления четырьмя электродвигателями поворота соответствующих дифференциальных АДР подвижного носителя, выходы каждого из четырех датчиков сигнала отрицательной обратной связи соединены соответственно с первым, вторым, третьим, четвертым входом узла формирования массива сигналов отрицательной обратной связи, информационный выход которого соединен информационной линией связи с десятым входом ЦВУ.
3. Устройство приведения зеркала антенны в поворотное движение в двух взаимно перпендикулярных плоскостях для осуществления способа по п.1, характеризующееся тем, что оно конструктивно выполнено в виде единого модуля, вмонтированного в оболочку подвижного носителя, и содержит антенное устройство, основание которого жестко установлено внутри модуля, при этом антенное устройство включает в свой состав двухосный карданов подвес, ось вращения наружной рамки которого установлена на шарикоподшипниковых опорах на основании антенного устройства, а ось вращения внутренней рамки которого установлена на шарикоподшипниковых опорах в наружной рамке, с одной стороны наружной рамки установлен встроенный электродвигатель, а с другой стороны наружной рамки соосно установлен встроенный датчик угла поворота наружной рамки так, что их роторы соответственно жестко закреплены на оси вращения наружной рамки, а их статоры соответственно жестко закреплены в основании антенного устройства, при этом с одной стороны внутренней рамки установлен также встроенный электродвигатель, а с другой стороны внутренней рамки соосно установлен встроенный датчик угла поворота внутренней рамки так, что их роторы соответственно жестко закреплены на оси вращения внутренней рамки, а их статоры соответственно жестко закреплены в наружной рамке двухосного карданова подвеса, во внутренней рамке которого размещены управляемый трехстепенной гироскоп, двухканальный гироскопический ДУС и три однокомпонентных измерителя соответствующих проекций кажущегося линейного ускорения, на основании антенного устройства установлены электронные узлы гиростабилизации и управления направлением зеркала антенного устройства по углу наклона и по азимуту соответственно, при этом для обеспечения приведения зеркала в поворотное движение по углу наклона и по азимуту антенное устройство также содержит двухстепенной шарнир, создающий возможность поворота зеркала в двух взаимно перпендикулярных плоскостях относительно облучателя, жестко закрепленного на основании антенного устройства, две тяги механического координатора антенного устройства, кулису, два шарнира Гука для механического соединения кулисы двумя тягами соответственно с двумя шарнирами Гука, установленными на задней поверхности зеркала антенного устройства, причем на входы узлов гиростабилизации и управления направлением зеркала антенного устройства поступают сигналы с соответствующих выходов управляемого трехстепенного гироскопа, а с выходов этих узлов сигналы поступают на соответствующие встроенные электродвигатели для поворота соответственно наружной рамки по углу наклона и поворота внутренней рамки по азимуту двухосного карданова подвеса, сигналы с соответствующих выходов двухканального гироскопического ДУС и трех однокомпонентных измерителей соответствующих проекций вектора кажущегося линейного ускорения, с выходов датчиков угла поворота наружной рамки по углу наклона и внутренней рамки по азимуту поступают на соответствующие входы ЦВУ, а на входы управляемого трехстепенного гироскопа поступают с соответствующих выходов ЦВУсигналы управления направлением зеркала антенного устройства.
4. Устройство приведения в действие дифференциальных аэродинамических рулей (АДР) подвижного носителя для осуществления способа по п.1, характеризующееся тем, что оно содержит четыре независимых идентичных привода соответствующих четырех дифференциальных АДР, каждый привод конструктивно выполнен в виде единого модуля, жестко вмонтированного в оболочку подвижного носителя, при этом четыре дифференциальных АДР расположены попарно крестообразно на поверхности оболочки подвижного носителя и жестко связаны с соответствующими валами каждого привода, вращающимися на шарикоподшипниковых опорах в корпусе каждого привода, причем одна пара противоположно расположенных соосно относительно центра вращения дифференциальных АДР валов направлена вдоль по оси, перпендикулярной к оси, вдоль по которой направлена другая пара противоположно расположенных соосно валов, при этом внутри корпуса каждого привода на соответствующем валу соосно установлены соответственно встроенные четыре электродвигателя и встроенные четыре датчика сигнала отрицательной обратной связи так, что ротор каждого из четырех встроенных электродвигателей и ротор каждого из четырех датчиков сигнала отрицательной обратной связи жестко закреплены на соответствующих четырех валах каждого привода, а статор каждого из четырех встроенных электродвигателей и статор каждого из четырех встроенных датчиков сигнала отрицательной обратной связи жестко установлены соответственно на корпусе каждого привода четырех дифференциальных АДР, причем каждый из четырех встроенных электродвигателей приводов четырех дифференциальных АДР через узел формирования сигналов управления четырьмя электродвигателями и каждый из четырех датчиков сигнала отрицательной обратной связи через узел формирования массива сигналов отрицательной обратной связи электрически соединены информационными линиями с ЦВУ бортовой системы самонаведения.
| УПРАВЛЯЕМЫЙ СНАРЯД И РУЛЕВАЯ МАШИНА ДЛЯ НЕГО | 2000 |
|
RU2184927C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ СТАБИЛИЗАЦИИ И САМОНАВЕДЕНИЯ ПОДВИЖНОГО НОСИТЕЛЯ И БОРТОВАЯ СИСТЕМА САМОНАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2303229C1 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТОЙ, НАВОДЯЩЕЙСЯ ПО ЛУЧУ | 1994 |
|
RU2107879C1 |
| DE 3843042 A1, 19.10.1989 | |||
| US 3754249, 21.08.1973. | |||

