Изобретение относится к военной технике, а именно к системам управления и самонаведения летательных аппаратов, например ракет, на крупноразмерные морские и наземные цели на фоне местности произвольной формы в любое время суток, в условиях плохой видимости и организованного противодействия.
Известны система наведения ракеты, состоящая из головки совмещения изображений и самонастраивающегося автопилота, а также системы полуактивного самонаведения и оптико-лазерные системы для прицеливания и дальнометрирования, например патенты №1840806, кл. F41G 7/00 от 24.08.1960 г., №2122699, кл. F41G 3/22 от 17.06.1998 г., №2231734, кл. F41G 7/22 от 16.09.2003 г., №2333449, кл. F42G 1/54, F41G 7/22 от 04.12.2006. Наиболее близким техническим решением, выбранным в качестве прототипа, является патент №1840806, кл. F41G 7/00 от 24.08.1960 г. «Система наведения управляемой ракеты, состоящей из головки совмещения изображений и самонастраивающегося автопилота». Она состоит из головки самонаведения (ГС), включающей визир, устройство памяти, анализирующее устройство, и самонастраивающегося автопилота, состоящего, в свою очередь, из блока формирования управляющего сигнала, где формируется управляющий сигнал в зависимости от метода наведения, блока самонастройки и основной части автопилота, в которую входят чувствительные элементы, усилители, коммутационные устройства и т.п.
Работа ГС основана на запоминании и сопровождении информации от всего участка местности, содержащей также изображение цели, полученное телевизионным или тепловизионным устройством. Система самонаведения, имея запомненное изображение, соответствующее точному направлению вектора скорости ракеты на цель, и текущее изображение, полученное с выхода устройства наведения, решает задачу максимального совмещения двух изображений. Величина смещения двух изображений (запомненного и текущего) является сигналом ошибки, управляющим положением ракеты в пространстве, которая поступает в блок формирования управляющего сигнала автопилота. Таким образом, головка самонаведения надежно выдает сигнал управления при визировании малоконтрастных целей на фоне мешающей местности, а также в присутствии ложных целей.
Автопилот является самонастраивающимся, т.е. автопилотом, параметры которого при изменении внешних условий преобразуются в соответствии с законом самонастройки. Он работает в режиме самонастройки как в процессе стабилизации полета ракеты, так и в режиме самонаведения.
Но прототип не лишен недостатков и ограничений. Так, основными факторами, влияющими на дальность обнаружения и распознавания цели телевизионными (ТВ) средствами, кроме уровня освещения наблюдаемой сцены естественными источниками (Солнце, Луна, звезды), является поглощение и рассеяние света в атмосфере. Так, телевизионная ГС при плохих погодных условиях или при неблагоприятных условиях подсвета цели в ряде часто встречающихся ситуаций может полностью терять контраст ее изображения. При применении в ГС тепловизионных (ТПВ) средств к негативным атмосферным факторам добавляются помехи, обусловленные аэродинамическим нагревом входных окон (оптического обтекателя) приемной оптической системы.
Для обеспечения работы в любое время суток ТВ- и ТПВ-каналы должны быть комплексированными. Однако создание единого приемного объектива высокого разрешения для таких комплексированных систем приводит к существенным сложностям в его реализации, а использование независимых каналов приводит к проблеме габаритных ограничений. Последние усугубляются тем, что для распознавания цели в условиях быстрого приближения к ней летательного аппарата пассивные ТВ- И ТПВ-каналы следует дополнять, например, лазерным дальномером.
Все эти отмеченные недостатки приводят к тому, что системы управления и самонаведения летательных аппаратов с использованием пассивных ТВ- или ТПВ-средств не могут обеспечить надежного и высокоточного функционирования в любое время суток при снижении уровней освещенности, при плохой видимости в различных погодных условиях и при организованном противодействии.
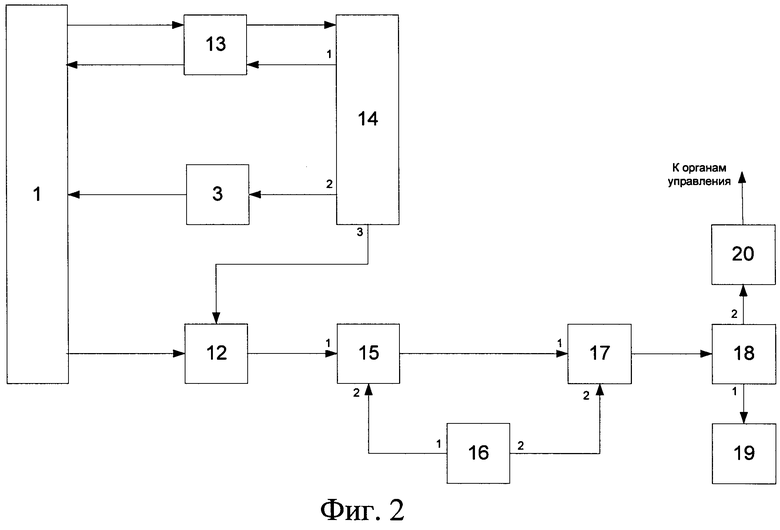
Предлагаемая активная лазерная головка самонаведения (ГСН), использующая импульсный метод наблюдения, оптическая и функциональная схемы которой приведены на фиг. 1 и фиг. 2 соответственно, свободна от указанных недостатков. Узел приемно-излучающей системы 1 (см. фиг. 1) стабилизирован в двухосном кардановом подвесе, наружная ось которого установлена в корпусе ГСН. На внутренней оси карданова подвеса, в стабилизированном узле, установлены двухзеркальная телескопическая насадка 2 и первый приемный объектив 11, лазерный излучатель 3 для подсвета цели, оптически сопряженный с первым наклонным дихроичным зеркалом 4, лазерный излучатель дальномера 13, оптически сопряженный со вторым наклонным зеркалом 5. Отраженное целью излучение лазерного излучателя 3 подсвета цели и лазерного излучателя дальномера 13 улавливается двухзеркальной телескопической насадкой 2 и направляется на спектроделитель 9, выполненный в виде дихроичного зеркала. Отраженное им излучение с помощью третьего плоского зеркала 6, первого узкополосного оптического фильтра 7 и второго объектива 8 фокусируется на приемную площадку фотоприемного устройства (ФПУ) дальномера 13. Прошедшее через спектроделитель 9 излучение с помощью второго узкополосного оптического фильтра 10 и первого объектива 11 фокусируется на приемную площадку ФПУ канала изображения 12. На осях карданова подвеса установлены роторы двигателей, датчики угла и угловой скорости системы стабилизации и слежения.
Фотоприемное устройство 12 канала изображения, в отличие от упомянутых выше пассивных (телевизионных и тепловизионных) систем, формирует изображение объектов, находящихся только на определенной дальности, которая задается дальномерным каналом. Пассивные же системы формируют изображение пространства, попадающего в поле зрения со всех дальностей, и поэтому принимают помехи (отражения, рассеивания) со всей трассы визирования цели. Поэтому качество изображения у активных (с подсветом) лазерных систем со стробированием сигнала по дальности существенно выше, чем у пассивных, где такое стробирование невозможно.
Стробирование принимаемых сигналов - одна из функций предлагаемой ГСН, осуществляемая с помощью блока синхронизации и стробирования, работа которого строится на основе обработки сигналов, полученных от лазерного дальномера, и управления лазером подсветки и фотоприемным устройством канала изображения. Именно эта функция отличает предлагаемую ГСН от описанных выше и известных ранее, а также имеет следствием указанные выше конструктивные отличия предлагаемой ГСН от известных: наличие лазерного излучателя подсветки, дальномера, узкополосных лазерных фильтров, зеркал, включая дихроичные, блока синхронизации и стробирования.
На фиг. 2 показана функциональная схема предлагаемой ГСН, где отражено взаимодействие ее основных компонентов. В ней приемно-излучающая оптическая система 1 управляется по углу двухосевым блоком стабилизации и слежения 20. Лазерный излучатель подсвета цели 3 и фотоприемное устройство 12 канала изображения по времени управляются блоком синхронизации и стробирования 14, который формирует временные стробы для ФПУ 12 по сигналам дальномерного канала. Узкополосные оптические фильтры 7 и 10 (см. фиг. 1) перед ФПУ 12 и ФПУ дальномера 13 необходимы для минимизации фоновых засветок (и шумов) в фотоприемных каналах. Сигнальная информация с выхода ФПУ 12 поступает на первый вход блока обнаружения и распознавания 15, на второй вход которого поступает сигнал эталонного изображения цели с первого выхода блока памяти эталонного изображения 16. Сигнал изображения обнаруженной цели поступает на первый вход блока выделения координат заданной точки цели 17, на второй вход которого поступает сигнал эталонного изображения точки прицеливания со второго выхода блока памяти эталонного изображения 16.
Полученные координаты точки прицеливания блока управления слежением 18 по первому выходу подаются на вход блока наведения носителя 19, а по второму выходу - на вход двухосевой системы стабилизации и слежения 20.
Приемно-излучающая оптическая система может быть реализована на зеркальных (металлооптических элементах) в сочетании с линзовыми. Узкополосные оптические фильтры могут быть интерференционными (как и дихроичные зеркала).
Электронные блоки (блок синхронизации и стробирования, блок обнаружения и распознавания, блок памяти эталонного изображения, блок выделения координат заданной точки цели, узлы дальномера) могут быть реализованы на элементной базе фирм Xilinx (ПЛИС) и Texas Instruments (ЦПОС).
Основными компонентами блока стабилизации и слежения могут быть моментные двигатели типа ДБ773.031 разработки ОАО «НПК Карат», инерциальная система типа ADIS 16383 фирмы Analog Device и датчики угла типа DS-58-32 фирмы Netser, а также электронная схема управления двигателями, которая может быть реализована на элементной базе фирмы Texas Instruments, в том числе с применением процессорных микросхем серии TMS.
Фотоприемное устройство канала изображения может быть реализовано, например, на основе полноформатного матричного фотоприемника фирмы «Силар», г. Санкт-Петербург с наличием в схеме его управления цепей синхронизации принимаемых сигналов.
Малогабаритные лазерные излучатели могут быть использованы в классе твердотельных лазеров разработки ОАО «Государственный оптический институт» им. С.И. Вавилова.
| название | год | авторы | номер документа |
|---|---|---|---|
| АКТИВНАЯ ЛАЗЕРНАЯ ГОЛОВКА САМОНАВЕДЕНИЯ | 2016 |
|
RU2650789C2 |
| Управляемый боеприпас | 2023 |
|
RU2836474C1 |
| Оптико-электронная многоканальная головка самонаведения | 2020 |
|
RU2756170C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ПОИСКА И СОПРОВОЖДЕНИЯ ЦЕЛИ | 2007 |
|
RU2335728C1 |
| ТЕЛЕВИЗИОННО-ЛАЗЕРНЫЙ ВИЗИР-ДАЛЬНОМЕР | 2012 |
|
RU2515766C2 |
| Комбинированная многоканальная головка самонаведения | 2017 |
|
RU2693028C2 |
| КОМБИНИРОВАННАЯ ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА | 2014 |
|
RU2541494C1 |
| ЛАЗЕРНАЯ ПОЛУАКТИВНАЯ ГОЛОВКА САМОНАВЕДЕНИЯ | 2010 |
|
RU2439477C1 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМЫМ СНАРЯДОМ С ЛАЗЕРНОЙ ПОЛУАКТИВНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ | 2015 |
|
RU2584210C1 |
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР (ВАРИАНТЫ) | 2007 |
|
RU2340871C1 |
Изобретение может быть использовано в системах управления и самонаведения летательных аппаратов, например ракет. Головка самонаведения содержит оптическую систему, выполненную с возможностью угловых отклонений относительно двух ортогональных осей подвеса по команде от двухосевой системы стабилизации и слежения, последовательно соединенные блок обнаружения и распознавания, блок выделения координат заданной точки цели и блок управления слежением, а также блок памяти и хранения эталонного изображения цели, задаваемого в виде предстартового полетного задания. Введены лазерный излучатель подсвета цели, плоские наклонные зеркала, спектроделитель, первый и второй узкополосные оптические фильтры, первый и второй объективы, лазерный дальномер, блок синхронизации и стробирования. Технический результат - обеспечение надежного и высокоточного функционирования в любое время суток при снижении уровней освещенности, плохой видимости в различных погодных условиях и при организованном противодействии. 2 ил.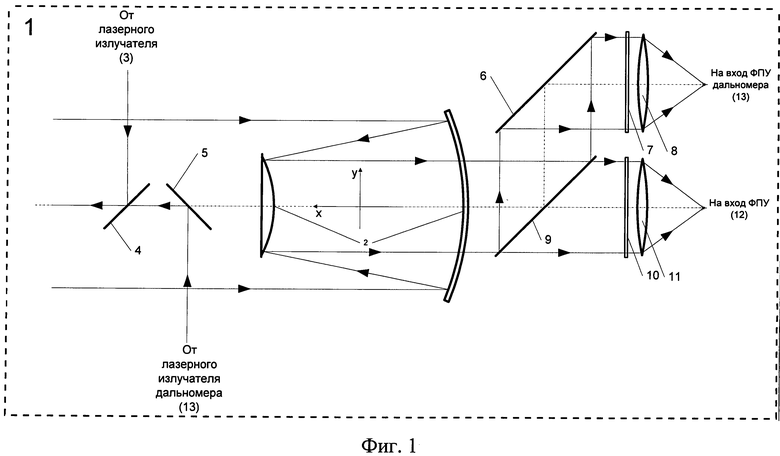
Активная лазерная головка самонаведения, содержащая оптическую систему, в фокусе которой установлено фотоприемное устройство канала изображения, и выполненную с возможностью угловых отклонений относительно двух ортогональных осей подвеса по команде от двухосевой системы стабилизации и слежения, последовательно соединенные блок обнаружения и распознавания, блок выделения координат заданной точки цели и блок управления слежением, а также блок памяти и хранения эталонного изображения цели, задаваемого в виде предстартового полетного задания, при этом выход фотоприемного устройства соединен со входом блока обнаружения и распознавания, выход блока памяти и хранения эталонного изображения соединен со вторым входом блока обнаружения и распознавания цели, первый выход блока управления слежением подключен к входу двухосевой системы стабилизации и слежения, а его второй выход соединен со входом системы управления носителем, отличающая тем, что в нее введены лазерный излучатель подсвета цели, первое, второе и третье плоское наклонное зеркало, спектроделитель, первый и второй узкополосный оптический фильтр, первый и второй объектив, лазерный дальномер, блок синхронизации и стробирования, при этом первое плоское наклонное зеркало выполнено дихроичным и оптически сопряжено с лазерным излучателем подсвета цели, спектроделитель установлен внутри приемной оптической системы и оптически сопряжен с последовательно установленными третьим плоским наклонным зеркалом, первым узкополосным оптическим фильтром и первым объективом, в фокусе которого установлено фотоприемное устройство лазерного дальномера, а также с последовательно установленными вторым узкополосным оптическим фильтром и вторым объективом, в фокусе которого установлено фотоприемное устройство канала изображения, выход лазерного дальномера соединен со входом блока синхронизации и стробирования, первый выход которого соединен со входом дальномера, второй выход - со входом лазерного излучателя подсвета цели, а третий выход - со вторым входом фотоприемного устройства канала изображения.
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ, СОСТОЯЩАЯ ИЗ ГОЛОВКИ СОВМЕЩЕНИЯ ИЗОБРАЖЕНИЙ И САМОНАСТРАИВАЮЩЕГОСЯ АВТОПИЛОТА | 1960 |
|
SU1840806A1 |
| ОПТИКО-ЭЛЕКТРОННЫЙ СЛЕДЯЩИЙ КООРДИНАТОР | 2011 |
|
RU2476826C1 |
| US 2004004155 A1, 08.01.2004 | |||
| US 2007075182 A1, 05.04.2007 | |||
| US 6606066 B1, 12.08.2003. | |||

