Изобретение относится к железнодорожному транспорту и может быть использовано на локомотивах в качестве автоматизации управления движением грузового локомотива или пассажирского подвижного состава.
В настоящее время на грузовых локомотивах (электровозах, тепловозах) и мотор-вагонном подвижном составе (электропоездах) применяется система (подсистема) автоведения, реализованная на базе блока Монитор 6 (https://www.saut.ru/catalog/mpsuid/monitor-6/) с операционной системой Windows или блока автоведения БА-2 без операционной системы (https://www.saut.ru/local/templates/saut/ajax/filedownload.php?file=1123&ibid=13). Существующие технические решения имеют следующие недостатки:
- команды управления движением формируются одноканальным узлом обработки данных - микропроцессором (микроконтроллером), в связи с чем отсутствует возможность проверить данные на корректность;
- отказ микропроцессора (микроконтроллера) приводит к неработоспособному состоянию функции автоведения, что, в свою очередь, ограничивает возможность применения автоведения для ведения поездов в автоматическом режиме (автомашинист);
- подготовку данных автоведения и обмен по линиям связи CAN и RS485 выполняет монитор системы управления, в связи с чем возникают временные задержки в распространении информации по линиям связи, влияющие на точность прицельной остановки подвижного состава;
- невозможно использовать функцию автоведения на подвижном составе при отсутствии бортовой системы безопасности САУТ, БЛОК, БЛОК-М, МПСУ-БД.
Предлагаемое техническое решение - блок автоведения АВ-САУТ отличается тем, что устраняет приведенные выше недостатки.
Блок автоведения АВ-САУТ выполняет функции:
- автоматизированного ведения поезда с учетом свободности блок-участков, определяемых по сигналам АЛСН/АЛС-ЕН, фактической эффективности тормозов поезда (на основе измеренного тормозного коэффициента), режима ведения впередиидущего поезда (тяга, выбег, торможение), расстояния до него, профиля пути согласно базе данных САУТ и электронной карты, действующих ограничений скоростей и графика движения поездов;
- выбора энергооптимального алгоритма ведения поезда;
- в режиме «Советчик» формирование информации для информирования машиниста о траектории движения, позволяющей обеспечить выполнение графика при минимальном энергопотреблении;
- автоматического управления служебным торможением с целью остановки подвижного состава перед путевым светофором с запрещающим показанием;
- формирования данных для системы информирования машиниста (СИМ), в т.ч. для режима ведения «Советчик»;
- взаимодействия с устройствами беспроводной передачи данных с целью информационного обеспечения системы автоведения, в т.ч. обновления базы данных САУТ, маршрутной карты, получения расписания движения и временных ограничений скорости и т.д.
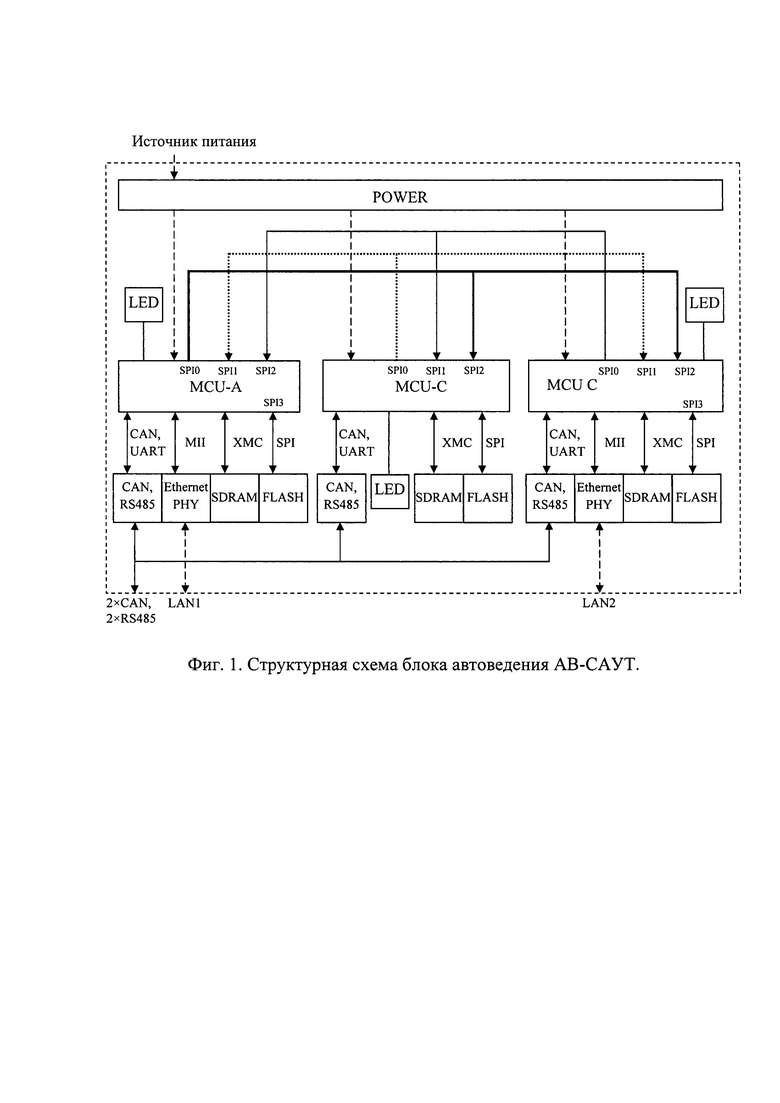
Структурная схема блока автоведения показана на фиг. 1.
MCU-A, MCU-B, MCU-C - микроконтроллеры;
Ethernet PHY - микросхема-драйвер физической линии Ethernet;
SDRAM - микросхема оперативной памяти;
FLASH - модуль flash-памяти;
LED - светодиодный индикатор;
линии связи CAN и RS485, LAN1 и LAN2 - линии передачи данных;
интерфейсы CAN, UART, MII, ХМС, SPI - интерфейсы передачи данных.
POWER - модуль электропитания.
Микроконтроллеры MCU-A - MCU-C реализуют логические функции устройства. Микросхемы-драйверы Ethernet PHY обеспечивают по интерфейсу МП доступ микроконтроллеров к физической среде передачи данных по линии Ethernet; такое соединение имеют только два канала - MCU-A и MCU-B, третий - MCU-C осуществляет обмен информацией через первый и второй. Микроконтроллеры связаны друг с другом высокоскоростной последовательной шиной SPI и двумя последовательными интерфейсами CAN и RS485.
Передача команд управления движением, а также взаимодействие с устройствами беспроводной передачи данных производится по резервированной линии связи Ethernet. Система управления подвижным составом осуществляет выборку информации по принципу «2 из 3» - таким образом, осуществляется снижение вероятности формирования автоведением некорректной команды управления.
Так как интерфейсы Ethernet не связаны друг с другом внутри блока, обе линии могут быть включены в единую локальную сеть посредством внешнего коммутатора Ethernet. Взаимодействие с графическим терминалом (монитором системы управления) осуществляется по линии связи Ethernet. На мониторе системы управления запускается графическая подпрограмма СИМ, в т.ч. графические интерфейсы для ввода управляющих настроек системы автоведения.
Микросхемы-драйверы RS485 и CAN обеспечивают доступ к последовательным шинам данных. По линии CAN осуществляется обмен информацией с приборами обеспечения безопасности движения, в т.ч. для реализации функции служебного торможения, корректировки значения диаметров бандажей колесных пар посредством взаимодействия блока с приемником точечного канала САУТ (ТКС) и блоком связи с датчиками пути и скорости.
По линии RS485 осуществляется связь блока автоведения с блоком измерения скорости вращения колесных пар подвижного состава (модулем блока защиты от скольжения - БЗС). К линии связи дополнительно могут подключаться устройства позиционирования: блок управления ультразвуковыми датчиками или устройство считывания RFID-меток. При подъезде подвижного состава к объекту, например, при детектировании пассажирской платформы или при считывании RFID-метки, блок осуществляет измерение расстояния до точки прицельной остановки, взятой из базы данных САУТ, и передает команду в систему управления на остановку подвижного состава или исполнения скоростных ограничений.
Микросхемы SDRAM блока предназначены для расширения оперативной памяти микроконтроллеров и используются для расчетов подпрограммой автоведения; микросхемы подключены к микроконтроллерам по параллельному интерфейсу ХМС.
Микросхемы FLASH блока обеспечивают энергонезависимое хранение базы данных САУТ, маршрутной карты и данных регистраторов автоведения; микросхемы подключены по последовательному интерфейсу SPI.
Модуль электропитания POWER обеспечивает преобразование входного напряжения постоянного тока от бортовой сети подвижного состава и подачу стабилизированного напряжения постоянного тока на электронные компоненты блока для его функционирования.
Светодиодные индикаторы LED применяются для визуального контроля исправного состояния блока.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ОБЕСПЕЧЕНИЯ СВЯЗИ В ПОЕЗДНОЙ ЛИНИИ ETHERNET | 2024 |
|
RU2839371C1 |
| МИКРОПРОЦЕССОРНАЯ СИСТЕМА УПРАВЛЕНИЯ И ДИАГНОСТИКИ ЭЛЕКТРОПОЕЗДА | 2018 |
|
RU2733594C2 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИОННЫХ СООБЩЕНИЙ В МИКРОПРОЦЕССОРНЫХ СИСТЕМАХ УПРАВЛЕНИЯ И ДИАГНОСТИКИ | 2015 |
|
RU2577196C1 |
| Комплекс информационного обеспечения системы автоматического управления торможением поезда | 2018 |
|
RU2697630C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ПОЕЗДОВ КОМПЛЕКСНАЯ | 2019 |
|
RU2732495C1 |
| УСТРОЙСТВО ТОКОВОЙ ЗАЩИТЫ С ФУНКЦИЕЙ МАТЕМАТИЧЕСКОГО АНАЛИЗА | 2020 |
|
RU2741063C1 |
| КОМПЛЕКСНАЯ СИСТЕМА УПРАВЛЕНИЯ И ДИАГНОСТИКИ МОТОРВАГОННОГО ПОДВИЖНОГО СОСТАВА | 2022 |
|
RU2790985C1 |
| КОМПЛЕКТ АППАРАТУРЫ ДЛЯ ИНФОРМИРОВАНИЯ ПАССАЖИРОВ (КАИП) | 2022 |
|
RU2785443C1 |
| Способ передачи данных регистратора параметров системы автоматического управления торможением поезда (РПС) на сервер взаимодействия с локомотивом по цифровому радиоканалу (СВЛТР) | 2020 |
|
RU2743774C1 |
| СПОСОБ ПЕРЕДАЧИ НА ЛОКОМОТИВ ИНФОРМАЦИИ О СЛЕДОВАНИИ ПО МАРШРУТУ ПО ГЛАВНОМУ ПУТИ С ОТКЛОНЕНИЕМ ИЛИ БЕЗ ОТКЛОНЕНИЯ ПО СТРЕЛКАМ | 2021 |
|
RU2769006C1 |
Изобретение относится к управлению движением поездов. Блок автоведения АВ-САУТ содержит три микроконтроллера MCU, микросхемы SDRAM, микросхемы FLASH, модуль электропитания POWER и светодиодные индикаторы LED. Микроконтроллеры MCU реализуют логические функции системы автоведения и связаны друг с другом высокоскоростной последовательной шиной SPI и двумя последовательными интерфейсами CAN и RS485. Два микроконтроллера имеют доступ к физической среде передачи данных по линии Ethernet, а третий микроконтроллер осуществляет обмен информацией через эти два микроконтроллера. Микросхемы SDRAM предназначены для расширения оперативной памяти микроконтроллеров. Микросхемы FLASH обеспечивают энергонезависимое хранение базы данных САУТ, маршрутной карты и данных регистраторов автоведения. Модуль электропитания POWER обеспечивает преобразование входного напряжения постоянного тока от бортовой сети подвижного состава и подачу стабилизированного напряжения постоянного тока на электронные компоненты. Светодиодные индикаторы LED применяются для визуального контроля исправного состояния блока. Технический результат заключается в снижении вероятности формирования системой автоведения некорректной команды управления подвижным составом. 2 з.п. ф-лы, 1 ил.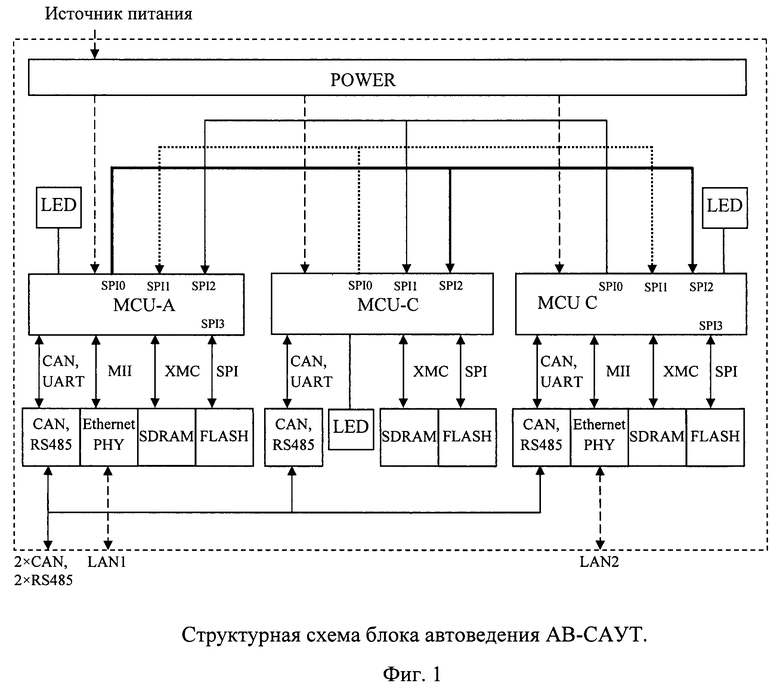
1. Блок автоведения АВ-САУТ для системы автоматизированного ведения поездов, характеризующийся тем, что содержит связанные друг с другом высокоскоростной последовательной шиной SPI и двумя последовательными интерфейсами CAN и RS485 три микроконтроллера MCU, реализующих логические функции системы автоведения, два из которых MCU-A и MCU-B посредством микросхемы-драйвера Ethernet PHY по интерфейсу МП имеют доступ к физической среде передачи данных по линии Ethernet, а микроконтроллер MCU-C осуществляет обмен информацией через микроконтроллеры MCU-A и MCU-B, подключенные к микроконтроллерам по последовательному интерфейсу CAN и UART микросхемы-драйверы линий CAN и RS485 для доступа к последовательным шинам данных, подключенные к микроконтроллерам по параллельному интерфейсу ХМС микросхемы SDRAM для расширения оперативной памяти микроконтроллеров, подключенные к микроконтроллерам по последовательному интерфейсу SPI микросхемы FLASH для энергонезависимого хранения базы данных САУТ, маршрутной карты и данных регистраторов автоведения, модуль электропитания POWER для преобразования входного напряжения постоянного тока от бортовой сети подвижного состава и подачу стабилизированного напряжения постоянного тока на электронные компоненты, светодиодные индикаторы LED для визуального контроля исправного состояния блока.
2. Блок автоведения АВ-САУТ по п. 1, отличающийся тем, что для снижения вероятности формирования системой автоведения некорректной команды управления подвижным составом осуществляет обработку полученной по линии связи информации тремя каналами.
3. Блок автоведения АВ-САУТ по п. 1, отличающийся тем, что реализует функцию автоведения на подвижном составе при отсутствии бортовых систем безопасности САУТ, БЛОК, БЛОК-М, МПСУ-БД.
| ЛЕНТОЧНО-КАНАТНЫЙ КОНВЕЙЕР | 0 |
|
SU166273A1 |
| МИКРОПРОЦЕССОРНАЯ СИСТЕМА УПРАВЛЕНИЯ И ДИАГНОСТИКИ ЭЛЕКТРОПОЕЗДА | 2018 |
|
RU2733594C2 |
| 0 |
|
SU204388A1 | |
| CN 111831507 A, 27.10.2020. | |||

