Изобретение относится к многофункциональным средствам управления транспортных средств, в частности, к микропроцессорным системам управления и диагностики электровоза.
Известна система управления SIBAS 32, применяемая на электропоезде ЭС2Г, и задекларированная система SIBAS PN фирмы Siemens (статьи журналов «СТА Современные технологии автоматизации» №2 2015 г и «Высокоскоростное движение» №5 2009 г.).
Система SIBAS 32 построена на модульном принципе. Вычислительная база устройств основана на 32-разрядных промышленных процессорах Intel 386/486, работающих под управлением операционной системы SIBAS OS, и 16-битовых микроконтроллерах SIEMENS SAF 80С16х. Вычислительная база устанавливается только в головном вагоне.
Для обмена информацией между модулями одного вагона используется резервированная вагонная шина MVB. Передача информации между вагонами осуществляется через резервированную шину WTB.
Система SIBAS PN построена на модульном принципе. Блок управления системой основан на промышленных процессорах PowerPC и IntelAtom серии Bay Trail, работающих под управлением операционной системы VxWorks. Блок управ-ления системой размещается только в головных вагонах.
Для обмена информации между модулями одного вагона используется резервированная вагонную сеть PROFINET с кольцевой топологией, выход из которой в другие шины возможен через соответствующие шлюзы.
Передача информации между вагонами осуществляется через резервированную сеть ЕТВ.
Недостатком систем SIBAS 32 является следующее:
1. В SIBAS 32 отсутствует возможность произвольной конфигурации поезда. Шина WTB требует полной переадресации при подцеплении или отцеплении одного вагона.
2. SIBAS 32 не может управлять электродинамическим и пневматическим торможением. Этой функцией управляет тормозная система, примененная в ЭС2Г.
3. Отсутствует возможность записи диагностических сообщений в единый съемный носитель информации и отсутствует возможность использования автоведения с базами данных системы безопасности.
Наиболее близкой по технической сущности к заявляемой микропроцессорной системе управления и диагностики электровоза является микропроцессорная система управления и диагностики локомотива (патент РФ на полезную модель №116114, МПК B61L 29/00,з. 07.11.2011, оп. 20.05.2012), содержащаямониторный блок (МБ), предназначенный для отображения текущей информации об измеряемых параметрах локомотива и аварийных сообщений, блок центрального вычислителя (БЦВ), предназначенный для выполнения алгоритмов системы и для обмена по интерфейсу между мониторным блоком МБ и блоком центрального вычислителя БЦВ, блоки управления контакторами (БУК), предназначенные для управления электромагнитными и электропневматическими клапанами локомотива в соответствии с управляющими сигналами БЦВ и диагностики включаемых аппаратов, блоки связи с пультом (БСП), предназначенные для обработки сигналов, поступающих от органов управления локомотива, и обеспечивающие информационный обмен по интерфейсу с БЦВ, устройства входных сигналов (БВС), преобразователи напряжения в код (ПНКВ), предназначенные для преобразования постоянного напряжения в цифровой формат и передачи по интерфейсу результатов измерений, блок управления возбуждением (БУВ), предназначенный для измерения частоты вращения коленчатого вала дизеля по сигналу тахогенератора дизеля, для формирования напряжения возбуждения тягового генератора с помощью управления тиристорами управляемого выпрямителя, блок связи с датчиками давления (БС-ДД), предназначенный для преобразования сигналов с датчиков напряжения, установленных на локомотиве, в последовательный код и передачи их по интерфейсу в БЦВ, блоки связи с токовыми датчиками давления (БС-ДД-Т), предназначенные для преобразования сигналов с датчиков давления и температуры, установленных на локомотиве, в последовательный код и передачи его по интерфейсу в БЦВ, а также для обеспечения питания датчиков и диагностики нарушений их работы, блок связи с датчиками пути скорости (БС-ДПС-БЗС), предназначенный для преобразования импульсного сигнала с датчика пути скорости в цифровой код и передачи обработанных сигналов в БЦВ, отличающаяся тем, что мониторный блок выполнен с дополнительными функциями диагностики систем и аппаратов локомотива и всех блоков, входящих в микропроцессорную систему управления, сохранения архива параметров с возможностью последующего просмотра архива, при этом МПСУиД дополнительно содержит устройство взаимодействия с локомотивом посредством цифровой технологической радиосвязи (СВЛ-ТР), а устройства входных и выходных сигналов выполнены в виде блоков, при этом все блоки и устройства, входящие в МПСУиД, распределены группами по отсекам локомотива и связаны между собой в сеть по последовательному дублированному интерфейсу, при этом блоки ПНКВ соединены с БЦВ через блок управления возбуждением БУВ по отдельным каналам связи для сбора и передачи данных с ПНКВ в БЦВ.
Недостаток известной системы состоит в том, что
- система не может устанавливаться на электропоездах (это основнойнедостаток и основной признак отличия систем);
- в системе отсутствует возможность управления поездом с 5-20 вагонами;
- в системе отсутствует возможность пневматического торможения;
- в системе отсутствует возможность управления асинхронным тяговым приводом;
- в системе отсутствует возможность управления дверями;
- в системе отсутствует возможность контроля температуры букс;
- в системе отсутствует возможность передачи данных в радиостанцию о наличии пожара;
- в системе отсутствует возможность управления климатической установкой;
- в системе отсутствует возможность отслеживать положения пневматических кранов;
- в системе отсутствует возможность учета расхода топливно-энергетических ресурсов;
- система не имеет общей линиисвязи с системой безопасности;
- в системе отсутствует возможность записи данных регистрации на единый съемный носитель системы безопасности.
Задача заявляемого технического решения состоит в разработке микропроцессорной системы управления и диагностики (МПСУиД) для установки на электропоезде, за счет обеспечения возможности управления пятью - двадцатью (5-20) вагонными электропоездами, пневматическим и электрическим торможением, асинхронным тяговым приводом и дверями во всех вагонах электропоезда, и изменения конфигурацию поезда.
Поставленная задача решается за счет того, что в микропроцессорной системе управления и диагностики МПСУиД электропоезда, содержащей,
монитор, предназначенный для отображения текущей информации об измеряемых параметрах электропоезда и аварийных сообщений,
блок управления контакторами (БУК), предназначенный для включения-выключения восьми контакторов или реле с номинальным напряжением от 50 до 110 В и током 1,2 А, в соответствии с полученными командами,
блок связи с пультом (БСП), предназначенный для ввода в систему 40 дискретных сигналов (напряжением 5 В) от органов управления локомотивом, установленных на пульте управления,
блок входных сигналов (БВС), предназначенный для ввода в систему 16-ти-дискретных сигналов от цепей управления локомотивов с номинальным напряжением 50 или 110 В;
преобразователь напряжения в код (ПНКВ), предназначенный для преобразования входных напряжений в кодовый сигнал с целью передачи его по интерфейсу RS485 в систему,
блок связи с датчиками давления (БС-ДД), предназначенный для преобразования напряжений с датчиков давления в последовательный код, и передачи их в систему по двум парам линии связи RS485, а также для измерения сопротивления изоляции цепей управления относительно корпуса электропоезда,
дополнительно введены:
блок центрального управления (ЦБУ) [вместо блока центрального вычислителя (БЦВ)],
блок контроля температуры букс БКТБ, предназначенный для измерения величины сопротивления температурного датчика, вычисления температуры датчика по его сопротивлению, выявления отказов датчиков температуры, передачи данных с вычисленной температурой по двум линиям связи RS485;
блок преобразователь линий (БПЛ RS485-CAN), предназначенный для пересылки данных из двух гальванически развязанных линий RS485 в две гальванически развязанные линии CAN и наоборот;
блок преобразователь линий (БПЛ RS485-Ethernet), предназначенный для преобразования двух гальванически развязанных линии RS485 в две гальванически развязанных линии Ethernet и наоборот;
блок преобразователь линий (БПЛ RS485-RS485), предназначенный для пересылки данных двух гальванически развязанных линии RS485 в две гальванически развязанные линии RS485 и наоборот;
блок связи с радиостанцией (БС-РС), предназначенный для передачи голосовых пожарных сигналов в локомотивную радиостанцию по линии связи ТУ-ТС;
модернизированный блок связи с датчиками давления (блок связи с кранами) [БС-ДД (БС-КР)], предназначенный для контроля положения пневматических кранов и передачи контролируемых данных в систему по двум парам линии связи RS485,
монитор дополнительно снабжен блоками автоведения и диагностики с программным обеспечением, и также подключен к линии связи 2xRS485 - 250 Кбит, второй вывод монитора соединен с линией CAN 20,
ЦБУ через линию связи 2х RS485-250 Кбит соединен с монитором, с блоком преобразователя линий БПЛ RS485-CAN, блоком преобразователя линий БПЛ RS485-RS485, блоком преобразователя линий БПЛ RS485-Ethernet, блок связи с радиостанцией БС-РС и блоком контроля температуры букс БКТБ, а через линию связи 2х RS485-57 Кбит - с блоком связи со средствами измерений БС-СИ2, модернизированным блоком связи с датчиками давления БС-ДД, блоком связи с пультом БСП и блоком входных сигналов БВС.
Все блоки и устройства, входящие в МПСУиД, распределены группами по отсекам электропоезда и связаны между собой в сеть по последовательному дублированному интерфейсу.
Введение блока центрального управления (ЦБУ) вместо блока центрального вычислителя (БЦВ) обеспечивает:
- организацию обмена данными между отдельными блоками системы МПСУиД в вагоне по четырем последовательным каналам передачи данных стандарта RS485;
- организации обмена данными между отдельными вагонами по четырем линиям стандарта Ethernet 100Base-T;
- организацию подключения к МПСУиД внешнего оборудования через выделенные для этих целей линии стандарта Ethernet 100Base-T;
- определение количества и ориентации вагонов в сцепе;
- питание блоков управления контакторами (БУК), с возможностью автоматического отключения питания их каналов при необходимости, предназначенных для включения-выключения восьми контакторов или реле с номинальным напряжением от 50 до 110 В и током 1,2 А, в соответствии с получаемыми командами;
- выдачу управляющих команд на исполнительные блоки, на основаниипо-лученнойпо линиям связи информации, в соответствии с заложенным алгоритмом;
- запись в энергонезависимую память, полученной и выдаваемой по линиям связи информации.
Использование монитора с блоками автоведения и диагностики позволяет иметь линию связи для обмена информацией с системой безопасности, записывать диагностическую информацию на единый съемный носитель системы безопасности и использовать функцию «Автоведения» с использованием баз данных системы безопасности;
Введение в МПСУиД блока контроля температуры букс (БКТБ) позволяет контролировать температуры букс колесных пар электропоезда,
Введение блока преобразователя линий (БПЛ RS485-CAN) в сочетании с блоком центрального управления (ЦБУ) позволяет управлять пневматическим и электрическим торможением, дверьми во всех вагонах электропоезда;
Введение блока преобразователя линий (БПЛ RS485-Ethernet) в сочетании с блоком центрального управления (ЦБУ) позволяет управлять асинхронным тяговым приводом и пневматическим и электрическим торможением;
Введение блока преобразователя линий (БПЛ RS485-RS485) позволяет управлять климатической установкой;
Введение блока связи с радиостанцией (БС-РС) позволяет передавать данные в радиостанцию о наличии пожара;
введение модернизированного блока связи с датчиками давления (блок связи с кранами) [БС-ДД (БС-КР)] с блоком центрального управления (ЦБУ) позволяет отслеживать положение пневматических кранов.
Наличие перечисленных функций микропроцессорной системы управления и диагностики позволяет использовать ее на электровозе.
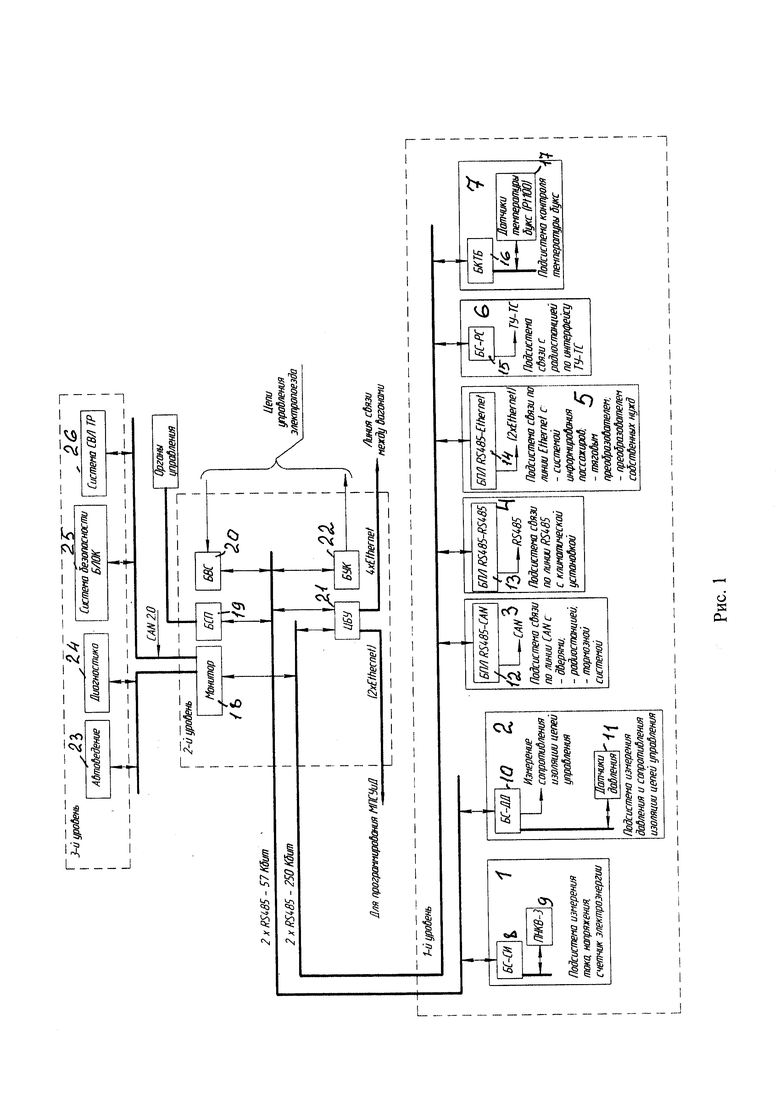
На рисунке 1 представлена структурная схема организации обмена информацией микропроцессорной системы управления и диагностики электровоза.
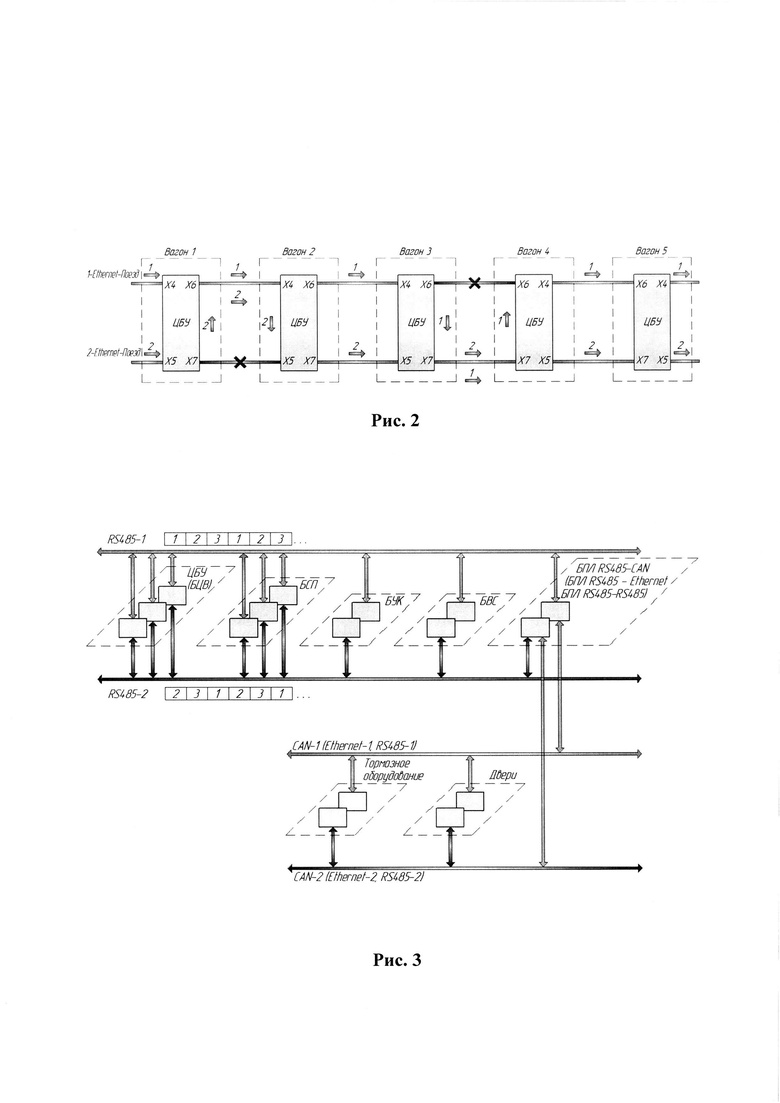
На рисунке 2 показан пример подключения управляющей линии поезда для электропоезда, состоящего из 5 вагонов и прохождения сигналов при наличии в линии двух повреждений.
На рисунке 3 приведена структурная схема линии связи. Управляющая линия вагона (2xRS485) предназначена для управления аппаратами вагона, выполнена дублированной, по стандарту MODBUS RTU.
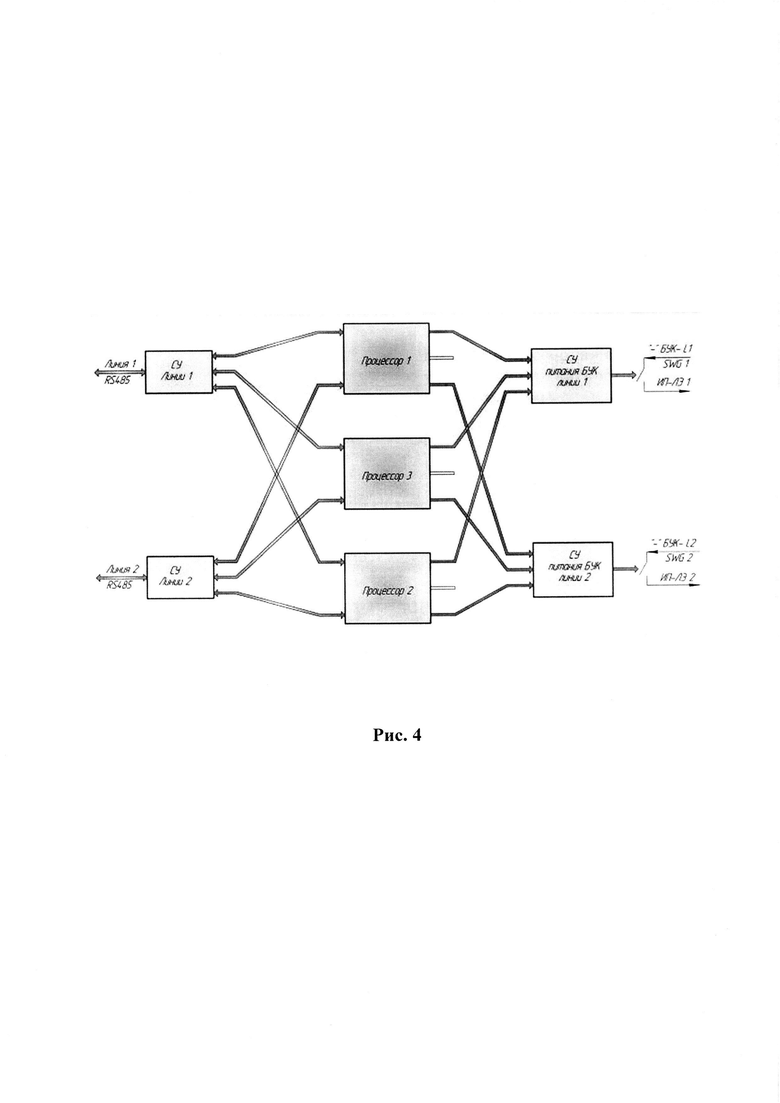
На рисунке 4 представлена структурная схема подключения процессоров к линиям связи, на примере блока ЦБУ.
Микропроцессорная система управления и диагностики электровоза состоит из трех уровней:
Нижний (1-й уровень) включает:
1 - подсистему измерения тока, напряжения, счетчик электроэнергии;
2 - подсистему измерения давления, сопротивления изоляции цепей управления;
3 - подсистему связи по линии CAN с дверями, радиостанцией, тормозной системой;
4 - подсистему связи по линии RS485 с климатической установкой;
5 - подсистему связи по линии Ethernet с системой информирования пассажиров, тяговым преобразователем, преобразователем собственных нужд;
6 - подсистему связи с радиостанцией по интерфейсу ТУ-ТС;
7 - подсистему контроля температуры букс;
Подсистема измерения тока, напряжения и расчета потребляемой электроэнергии - 1 в МПСУиД построена при помощи измерительных блоков 8-БС-СИ, 9 - ПНКВ. Блок 8 - БС-СИ преобразовывает данные из одноканальной линии RS-485 системы измерений в управляющую двухканальную линию вагона 2xRS485. Блок 8 - БС-СИ также производит расчет электроэнергии. ПНКВ – 9 подключаются к одному каналу линии системы измерений и отвечают за измерение постоянного тока и напряжения.
Подсистема измерения давления и сопротивления изоляции цепей управления - 2 построена на измерительном блоке 10, - БС-ДД и 11 - датчиках давления, с выходным напряжением постоянного тока. Измеренное сопротивление изоляции и напряжение с датчиков давления (эквивалентное измеренному давлению) блок 10 - БС-ДД преобразовывает в цифровой код и выдает в управляющую двухканальную линию вагона 2xRS485.
Подсистема связи с аппаратурой электропоезда по линии CAN, RS485, Ethernet, ТУ-ТС.
Для связи МПСУиД с другим оборудованием (дверями, тяговым преобразователем, преобразователем собственных нужд, системой микроклимата, радиостанцией, тормозной системой, системой информирования пассажиров), установленным на электропоезде используются дополнительные интерфейсы.
а) CAN линия
CAN линия выполнена дублированной. В качестве шлюза между CAN линией и линией RS8485МПСУиД используется блок 12 - БПЛ RS485-CAN.
Физический уровень линии CAN функционирует в соответствии со спецификацией протокола CAN V2.0A фирмы BOSCH и стандарта ISO IS 11898-2. Скорость передачи данных по каждой линии CAN - 500 Кбит/с.
б) RS485 линия выполнена дублированной. В качестве шлюза между линией RS485 и линией RS485 МПСУиД используется блок 13 - БПЛ RS485-RS485.
Информационные параметры линии связи:
- скорость передачи данных одной линии 250 Кбит/с;
- размер символа: 8 бит;
- контроль четности: отсутствует;
- длина стоп-бита: 1 бит.
Линия выполнена по стандарту MODBUS RTU.
в) Ethernet линия.
Ethernet линия выполнена дублированной. В качестве шлюза между линией Ethernet и линией RS485МПСУиД используется блок 14 - БПЛ RS485-Ethernet. Линия выполнена по стандарту Ethernet 100Base-TX (IEEE 802.3).
г) ТУ-ТС.
Данная линия предназначена для передачи речевых сообщений из МПСУиД в локомотивную радиостанцию. В качестве шлюза между радиостанцией и системой МПСУиД используется блок 15 - БС-РС.
д) Подсистема контроля температуры букс предназначена для диагностики перегрева буксовых узлов. В случае перегрева буксы МПСУиД информирует машиниста. Подсистема реализована при помощи блока 16 - БКТБ и 17 - датчиков температуры стандарта Pt100. К блоку 16 - БКТБ допускается подключение до пяти датчиков температуры.
Средний (2-й уровень) МПСУиД включает:
18 - монитор, 19 - блок связи с пультом (БСП), 20 - блок входных сигналов (БВС), 21 - Центральный блок управления (ЦБУ), 22 - блок управления контакторами (БУК).
Средний (2-й уровень) МПСУиД обеспечивает взаимосвязь органов управления пульта управления, монитора 18 с различным оборудованием всех вагонов электропоезда, верхним и нижним уровнями системы (подсистемами). Так как неисправности, возникающие в блоках этого уровня, могут привести к аварийным ситуациям и потере управляемости электропоезда - блоки этого уровня выполнены с двух-трех кратным резервированием.
Устройства среднего уровня связаны с нижним уровнем посредством, управляющих линий вагона, сдвоенного (с резервированием) интерфейса RS485. В каждой линии связи RS485, Ethernet присутствует информация от трех каналов МПСУиД. Каждая подсистема подключается к интерфейсу не более, чем одним приемопередатчиком для каждой линии.
Информация подразделяется на оперативную, связанную непосредственно с управлением электропоезда (цикл обмена не более 50 мс), и вспомогательную с циклом обмена до 1 с и более. МПСУиД производит управление электропоездом путем выдачи выходных (управляющих) сигналов на его аппараты в соответствии с заданным алгоритмом работы. Необходимый набор входных дискретных и аналоговых сигналов определяется программным алгоритмом.
Верхний (3-й уровень) МПСУ и Д включает в себя подсистемы - 23 автоведения, 24 - диагностики, 25 - система безопасности БЛОК, 26 - система СВЛ ТР.
Для связи МПСУиД установленных в различных вагонах используются управляющие линии поезда - четыре линии Ethernet «Ethernet-Поезд» (при помощи блока ЦБУ).
Управляющая линия поезда предназначена для управления отдельными вагонами.
Управляющая линия поезда «Ethernet-Поезд» выполнена дублированной, по стандарту Ethernet 100Base-TX (IEEE 802.3).
В каждом вагоне находится четыре независимых межвагонных линии Ethernet подключенных к центральному блоку управления (ЦБУ). Для обеспечения возможности резервного переконфигурирования линии с целью обхода поврежденного участка линии ЦБУ выполняет перераспределение потока данных, минуя поврежденную линию. При отсутствии неисправностей линий связи линии работают независимо. На рисунке 2 показан пример подключения управляющей линии поезда для электропоезда, состоящего из 5 вагонов, и прохождения сигналов при наличии в линии двух повреждений.
ЦБУ имеет три независимых канала. Система работает по принципу 2 из 3, поэтому в каждую линию связи посылаются телеграммы от каждого из трех каналов. Каждый ЦБУ имеет два фиксированных IP адреса. IP адрес содержит тип электропоезда, заводской номер вагона, номер линии.
По каждой линии связи передаются:
- от головного вагона - блок команд управления поездом, в который входят команды управления тягой, торможением, климатическими установками, дверями и другим оборудованием;
- к головному вагону от всех остальных вагонов - блок данных сигнализации, в который входят данные о режимах работы оборудования и результаты диагностики вагона;
- данные информационной системы электропоезда, в случае повреждения информационной, нерезервированной линии связи.
Параметры одного цикла обмена данными в составе из 10 вагонов:
- скорость обмена данными - 100 (10) Мбит/с;
- длина блока информации - 200;
- число блоков за цикл - 33;
- период цикла передачи - 50 мс;
- время передачи одного блока - 0,02 (0,2) мс;
- время обмена данными за цикл - 0,66 (6,6) мс;
- загрузка линии связи - 13,2 (1,3) %.
Управляющая линия вагона (2xRS485)
Управляющая линия вагона выполнена из четырех независимых линий RS485. Линии сгруппированы попарно (2xRS485), в зависимости от скорости передачи данных, и предназначены для подключения разного оборудования. Каждая линия в первой паре (2xRS485-1) работает со скоростью 57600 бит/с.Каждая линия во второй паре (2xRS485-2) работает со скоростью 250000 бит/с.
Остальные информационные параметры линии связи:
- размер символа: 8 бит;
- контроль четности: отсутствует;
- длина стоп-бита: 1 бит.
Управляющая линия вагона (2xRS485) предназначена для управления аппаратами вагона, выполнена дублированной, по стандарту MODBUS RTU. Структурная схема линии связи приведена на рисунке 3.
При отсутствии неисправностей линий связи обмен данными производится по обеим линиям параллельно со сдвигом данных во времени и эффективная скорость обмена данными увеличивается в два раза. При неисправности одной из линий обмен данными производится по одной оставшейся. Полный цикл обмена информацией около 50 мс.
Особенности блоков среднего уровня.
Наиболее ответственные блоки (21 - ЦБУ, 19 - БСП) имеют три независимых канала. Система работает по принципу 2 из 3, поэтому в каждую линию связи посылаются и принимаются телеграммы от каждого из трех каналов. Структурная схема подключения процессоров к линиям связи, на примере блока 21 ЦБУ, показана на рисунке 4.
Остальные блоки выполнены с двумя независимыми каналами, подключенными каждый к своей линии связи.
При возникновении неисправностей в блоках верхнего и нижнего уровней, как правило, не происходит полного отказа электропоезда, а только ухудшение функционирования, поэтому устройства не имеют резервирования, или имеют его частично.
Подсистема автоведения после ввода необходимых исходных данных (масса, длина поезда и др.) может работать в двух режимах - «Советчик» и «Автоведеие». В режиме «Советчик» управление электропоездом осуществляется машинистом, а на монитор выводятся рекомендуемые (расчетные) режимы движения. В режиме «Автоведение» управление ПС происходит в автоматическом режиме.
Устройства верхнего уровня связаны между собой и со средним уровнем посредством интерфейса CAN 2.0. В обмене используются только макрокоманды, доступа к управлению отдельными элементами нет (например, контакторами и регуляторами).
CAN линия устройств верхнего уровня предназначена для связи устройств необходимых для работы только в активной кабине управления с системой управления электропоездом. К таким устройствам относятся:
- система обеспечения безопасности движения (БЛОК);
- система автоматического ведения поезда;
- система технологической цифровой радиосвязи (СВЛ-ТР).
Линия связи выполнена по стандарту CAN, скорость обмена 50000 бит/с.
Диагностика.
В процессе работы каждый блок МПСУиД производит самодиагностику.
Кроме того МПСУиД производит диагностику непосредственно связанных с ними цепей электропоезда.
Подсистема диагностики обеспечивает диагностику аппаратуры электропоезда в автоматическом или ручном режиме перед отправлением, в пути следования и в условиях депо.
В диагностическую информацию входят данные о состоянии МПСУиД, цепей управления, пневматических цепях, аппаратуре первого и третьего уровней. Все данные выводимые на мониторах согласуются во время разработки и адаптации МПСУиД под электропоезд.
Регистратор параметров МПСУиД (РПМ), позволяющий производить запись данных о функционировании системы в энергонезависимую память, имеет следующие возможности:
- число циклов записи, не менее - 100000;
- время хранения данных в регистраторе при выключенном питании не менее, лет - 5;
- дискретность записи параметров, с - 0,05.
Длительность непрерывной записи параметров для полного регистратора параметров МПСУиД, в среднем составляет:
км - 2000;
час - 48.
Длительность непрерывной записи параметров для сокращенного регистратора параметров МПСУиД, в среднем составляет:
км - 10000;
час - 240.
Перечень сигналов для регистрации согласовывается с разработчиком электропоезда.
МПСУиД допускает обеспечивает выдачу голосовых сообщений о наиболее важных отклонениях в работе оборудования.
Для отображения режимов работы электропоезда и диагностической информации используется два монитора. Оба монитора имеют одинаковый набор данных, чем обеспечивается резервирование.
В каждый вагон электропоезда устанавливается функционально законченная система МПСУиД, которая привязана к номеру вагона и его назначению. При подключении такого вагона к сформированному поезду, оборудованному МПСУиД, происходит автоматическое изменение конфигурации поезда с включением функций дополнительного вагона в функции электропоезда. При существующем варианте МПСУиД допускается создавать поезд до двадцати вагонов.
Для управления электродинамическим и пневматическим торможением МПСУиД подключена к тяговому преобразователю, через шлюз БПЛ RS485-Ethernet и к тормозной системе, через шлюз БПЛ RS485-CAN. При таком подключение МПСУиД может перераспределять тормозные усилия между электрическим и пневматическим торможением. Пневматическое торможение используется как дополнительное к электродинамическому и используется в том случае, когда недостаточно тормозного усилия электродинамического тормоза. Такой подход к реализации торможения позволяет снизить изнашиваемость тормозных колодок и тормозных дисков.
Для объединения МПСУиД и комплекса безопасности БЛОК применена CAN линия с единым протоколом обмена данными (протокол применяется на электровозах ВЛ11К, 2ЭС6, 2ЭС10, 2ЭС7).
Применив общую линию связи с общим протоколом обмена данными МПСУиД записывает данные на единый схемный носитель информации, система автоведения использует базы данных системы безопасности. Дополнительно МПСУиД использует скорость, время и прочие данные системы безопасности.
Для подключения дополнительного оборудования в МПСУиД используются шлюзовые блоки БПЛ RS485-CAN, БПЛ RS485-RS485, БПЛ RS485-Ethernet с широко используемыми интерфейсами RS485, CAN, Ethernet.
Заявленная микропроцессорная система управления и диагностики может устанавливаться на электропоездах, позволяет управлять поездом с 5-20 вагонами, имеет возможность пневматического торможения, оснащена интерфейсной связью с системой безопасности, а также, обладает возможностью записи данных регистрации на единый съемный носитель системы безопасности.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКСНАЯ СИСТЕМА УПРАВЛЕНИЯ И ДИАГНОСТИКИ МОТОРВАГОННОГО ПОДВИЖНОГО СОСТАВА | 2022 |
|
RU2790985C1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИОННЫХ СООБЩЕНИЙ В МИКРОПРОЦЕССОРНЫХ СИСТЕМАХ УПРАВЛЕНИЯ И ДИАГНОСТИКИ | 2015 |
|
RU2577196C1 |
| БЛОК АВТОВЕДЕНИЯ АВ-САУТ | 2024 |
|
RU2834103C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ПОЕЗДОВ КОМПЛЕКСНАЯ | 2019 |
|
RU2732495C1 |
| СПОСОБ И УСТРОЙСТВО ТОЧНОГО ПОЗИЦИОНИРОВАНИЯ ЖЕЛЕЗНОДОРОЖНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2020 |
|
RU2747750C1 |
| Система связи и дистанционного управления для скоростного электропоезда | 2021 |
|
RU2754376C1 |
| Способ управления и диагностики тормозной системой поезда с применением технологии цифрового двойника и устройство для его реализации | 2022 |
|
RU2820579C2 |
| КОМПЛЕКТ АППАРАТУРЫ ДЛЯ ИНФОРМИРОВАНИЯ ПАССАЖИРОВ (КАИП) | 2022 |
|
RU2785443C1 |
| СИСТЕМА ВИДЕОНАБЛЮДЕНИЯ И ОПОВЕЩЕНИЯ ПАССАЖИРОВ НА ЭЛЕКТРОПОЕЗДЕ | 2018 |
|
RU2741152C2 |
| ЛОКОМОТИВНАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ | 2013 |
|
RU2554912C2 |
Изобретение относится к средствам управления и диагностики электровозов. Микропроцессорная система имеет три уровня. Первый уровень включает подсистему измерения тока, напряжения, счетчик электроэнергии; подсистему измерения давления, сопротивления изоляции цепей управления; подсистему связи по линии CAN с дверями, радиостанцией и тормозной системой; подсистему связи по линии RS485 с климатической установкой; подсистему связи по линии Ethernet с системой информирования пассажиров, тяговым преобразователем, преобразователем собственных нужд; подсистему связи с радиостанцией по интерфейсу ТУ-ТС; подсистему контроля температуры букс. Второй уровень включает монитор, блок связи с пультом (БСП), блок входных сигналов (БВС), центральный блок управления (ЦБУ) и блок управления контакторами (БУК). Третий уровень включает подсистему автоведения поезда, подсистему диагностики, систему обеспечения безопасности движения, систему технологической цифровой радиосвязи. Достигается возможность реализации функций управления и диагностики электровоза. 4 ил.
Микропроцессорная система управления и диагностики МПСУиД электропоезда, содержащая монитор, предназначенный для отображения текущей информации об измеряемых параметрах электропоезда и аварийных сообщений, блок управления контакторами (БУК), предназначенный для включения-выключения восьми контакторов или реле с номинальным напряжением от 50 до 110 В и током 1,2 А, в соответствии с полученными командами, блок связи с пультом (БСП), предназначенный для ввода в систему 40 дискретных сигналов (напряжением 5 В) от органов управления локомотивом, установленных на пульте управления, блок входных сигналов (БВС), предназначенный для ввода в систему 16-ти дискретных сигналов от цепей управления локомотивов с номинальным напряжением 50 или 110 В; преобразователь напряжения в код (ПНКВ), предназначенный для преобразования входных напряжений в кодовый сигнал с целью передачи его по интерфейсу RS485 в систему, блок связи с датчиками давления (БС-ДД), предназначенный для преобразования напряжений с датчиков давления в последовательный код и передачи их в систему по двум парам линии связи RS485, а также для измерения сопротивления изоляции цепей управления относительно корпуса электропоезда, отличающаяся тем, что в систему дополнительно введены блок центрального управления (ЦБУ), монитор снабжен блоками автоведения и диагностики, блок контроля температуры букс БКТБ, предназначенный для измерения величины сопротивления температурного датчика, вычисления температуры датчика по его сопротивлению, выявления отказов датчиков температуры, передачи данных с вычисленной температурой по двум линиям связи RS485, блок-преобразователь линий (БПЛ RS485-CAN), предназначенный для пересылки данных из двух гальванически развязанных линий RS485 в две гальванически развязанные линии CAN и наоборот, блок-преобразователь линий (БПЛ RS485-Ethernet), предназначенный для преобразования двух гальванически развязанных линии RS485 в две гальванически развязанные линии Ethernet и наоборот, блок-преобразователь линий (БПЛ RS485-RS485), предназначенный для пересылки данных двух гальванически развязанных линии RS485 в две гальванически развязанные линии RS485 и наоборот, блок связи с радиостанцией (БС-РС), предназначенный для передачи голосовых пожарных сигналов в локомотивную радиостанцию по линии связи ТУ-ТС, модернизированный блок связи с датчиками давления (БС-ДД), предназначенный для контроля положения пневматических кранов и передачи контролируемых данных в систему по двум парам линии связи RS485, ЦБУ соединен с монитором и через линию связи 2х RS485-250 Кбит - с БПЛ RS485-CAN, БПЛ RS485-RS485, БПЛ RS485-Ethernet, БС-РС и БКТБ, а через линию связи 2х RS485-57 Кбит - с БС-СИ2, БС-ДД, БСП и БВС.
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИОННЫХ СООБЩЕНИЙ В МИКРОПРОЦЕССОРНЫХ СИСТЕМАХ УПРАВЛЕНИЯ И ДИАГНОСТИКИ | 2015 |
|
RU2577196C1 |
| Храповой механизм | 1958 |
|
SU116114A1 |
| Способ получения покрывных красок для кожи | 1959 |
|
SU127345A1 |
| СИСТЕМА УПРАВЛЕНИЯ МНОГОСЕКЦИОННЫМ ТЕПЛОВОЗОМ | 2013 |
|
RU2546049C1 |
| СПОСОБ ДИАГНОСТИКИ ДЛЯ РЕЛЬСОВЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2013 |
|
RU2608992C2 |

