Изобретение относится к специальным землеройным машинам.
Роторный экскаватор предназначен для рытья траншей в условиях повышенной опасности для обслуживающего персонала, таких как линия боевого соприкосновения, неблагоприятная экологическая среда, недоступность местности для присутствия на ней человека.
Данный траншейный экскаватор также может применяться в промышленном и гражданском строительстве для механизации труда при прокладке кабелей и трубопроводов в непосредственной близости от капитальных стен и других сооружений.
Широко известны различные конструкции траншейных роторных экскаваторов гражданского назначения, а также инженерная траншейная машина БТМ-3 (Военное обозрение, Землеройные машины инженерных войск СССР от 30 мая 2013 г.).
Конструкция вышеперечисленных роторных экскаваторов в основном однотипны. Так, например, машина БТМ-3 состоит из базовой машины в виде тяжелого арттягача АТ-Т, оборудованного ходоуменьшителем и коробкой отбора мощности, и роторного рабочего органа с поперечным транспортером-метателем грунта, снабженным отбойными щитками.
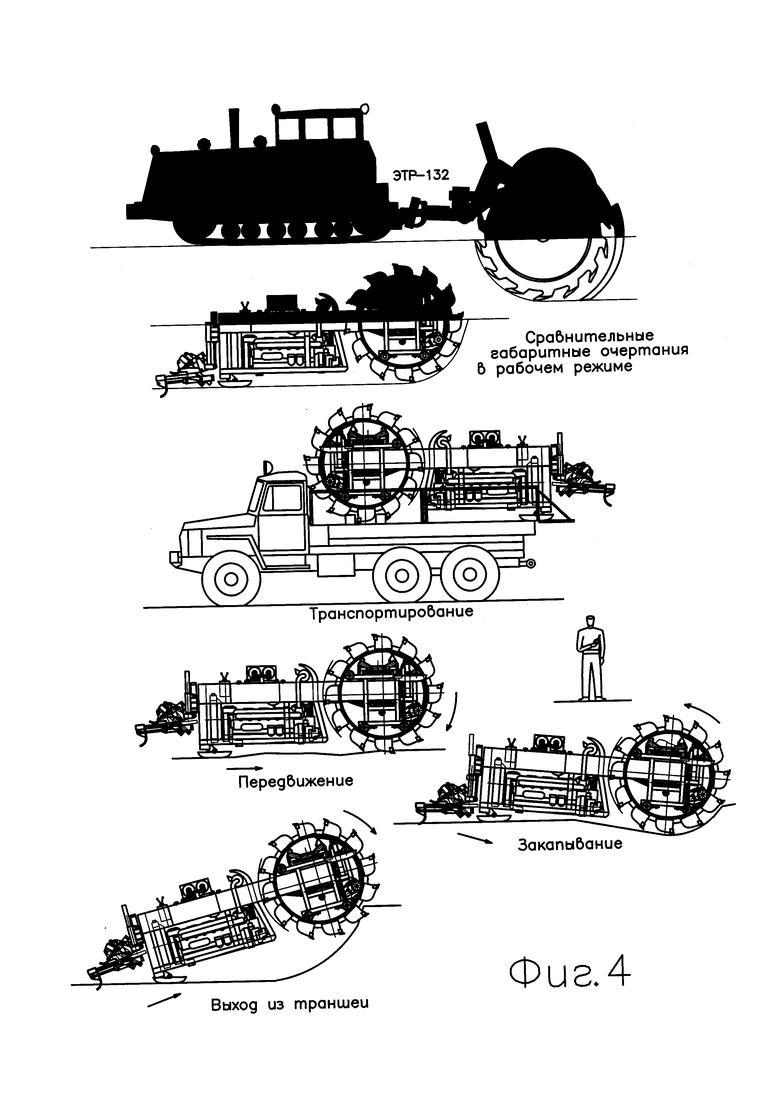
Несмотря на все достоинства таких траншейных экскаваторов у них есть существенный недостаток - значительные габариты, что снижает скрытность и не позволяет производить работы в стесненных условиях.
Кроме того, отсутствует защита обслуживающего персонала от огневого воздействия противника, что делает невозможным применение на линии боевого соприкосновения.
Данные недостатки частично устранены в траншейной гусеничной машине RU 2148126 C1 от 1998.06.29, принятой за прототип.
Траншейная гусеничная машина включает корпус, гусеничную ходовую часть, моторно-силовую установку, трансмиссию ходовой части, роторный рабочий орган и трансмиссию роторного рабочего органа. При этом корпус выполнен в виде жесткого короба с отсеками, в которых размещаются агрегаты и моторно-силовая установка.
Недостатком данной траншейной гусеничной машины является то, что при отрывке траншеи базовая машина находится на поверхности и представляет собой цель для противника. Кроме того, значительные габариты машины не позволяют ей работать в стесненных условиях.
Наличие отдельных трансмиссий ходовой части и рабочего органа усложняют конструкцию, а присутствие механика-водителя в незащищенной кабине во время работы не позволяет применять данную траншейную машину на переднем крае обороны.
Целью предполагаемого изобретения является повышение скрытности работы, уменьшение габаритов, упрощение конструкции машины и повышение уровня безопасности оператора.
Техническим результатом заявляемого изобретения является разработка специальной землеройной машины с дистанционным управлением, которая при работе находилась бы на дне отрываемой траншеи и была малоуязвима для огня противника, позволяя производить работы скрытно и без непосредственного присутствия при ней оператора.
Данный технический результат достигается тем, что роторный экскаватор специального назначения содержит корпус, моторную силовую установку, роторный рабочий орган с поперечным транспортером, систему дистанционного управления и механизм рабочего перемещения. При этом рабочий орган выполнен в виде двух раздельно управляемых расположенных V-образно роторов с возможностью изменения угла их наклона в вертикальной плоскости на противоположный, а приводы вращения роторов выполнены реверсивными, что позволяет их использовать в качестве ходовых колес при транспортировании в пределах рабочей зоны.
Механизм рабочего перемещения выполнен в виде двух работающих в противофазе в автоматическом режиме гидравлических упоров, поочередно заглубляемых в грунт на дне траншеи. Моторно-силовая установка размещена между рабочим органом и механизмом рабочего перемещения, содержит дизель и дистанционно управляемые оператором гидронасосы.
Корпус выполнен в виде хребтовой балки коробчатого сечения, отсеки которой являются емкостями для топлива, масла, гидравлической рабочей жидкости и аппаратуры дистанционного управления.
Роторный рабочий орган снабжен регулируемыми по высоте лыжными опорами, ограничивающими заглубление роторов.
Новым в предлагаемой конструкции является то, что машина в рабочем режиме передвигается по дну отрываемой траншеи, управление машиной осуществляется дистанционно, правый и левый ротор имеют возможность работы с разными скоростями, осуществляя таким образом поворот машины.
Наличие режима реверса вращения роторов позволяет использовать их в качестве движителя при передвижении на рабочей площадке.
Для пояснения устройства и работы предлагаемого роторного экскаватора специального назначения приведены чертежи:
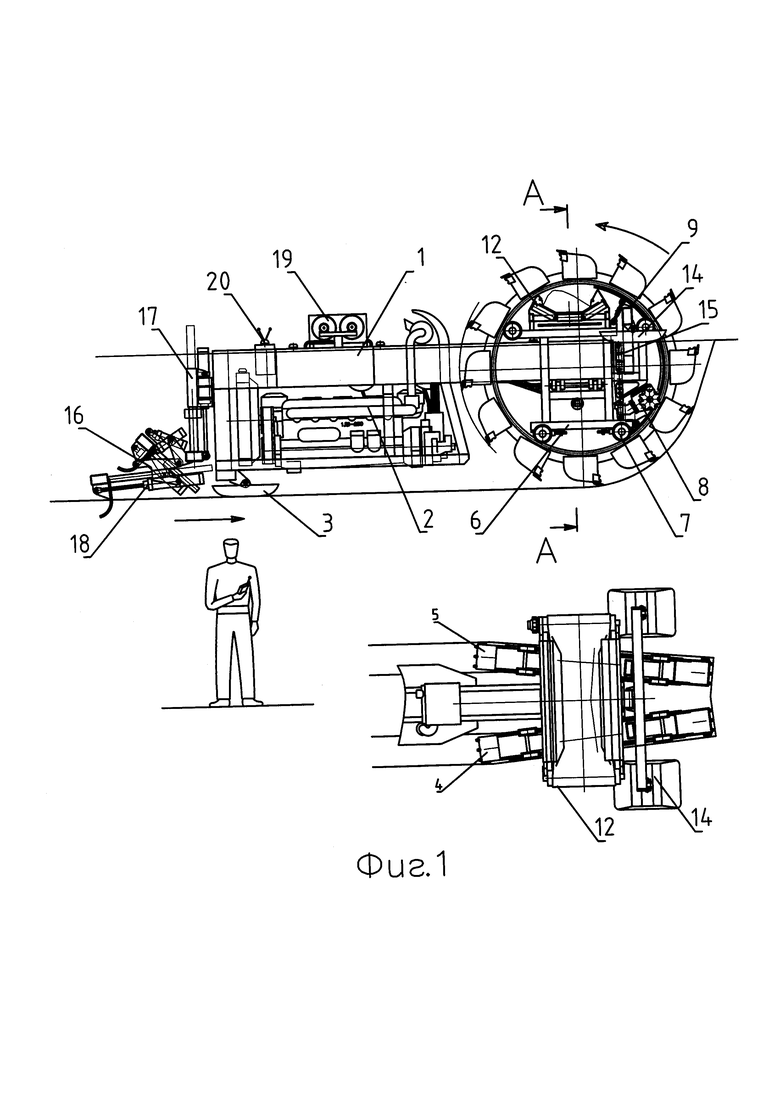
Фиг. 1 - общий вид роторного экскаватора;
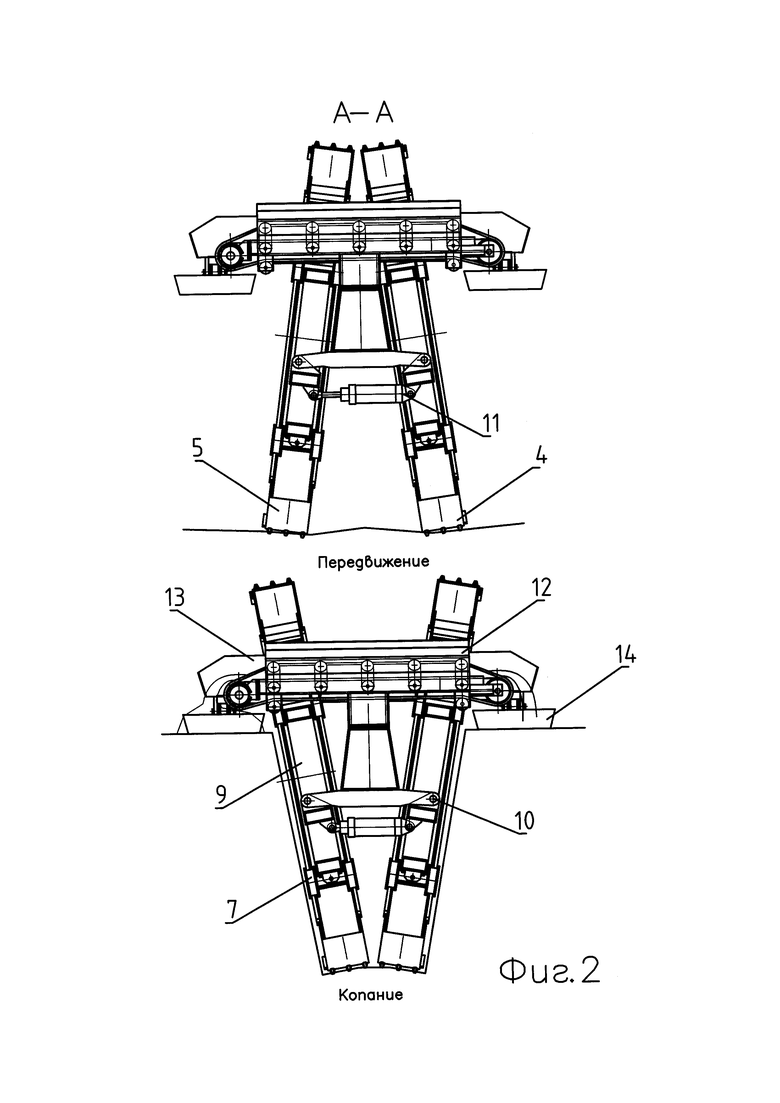
Фиг. 2 - разрез по роторному рабочему органу;
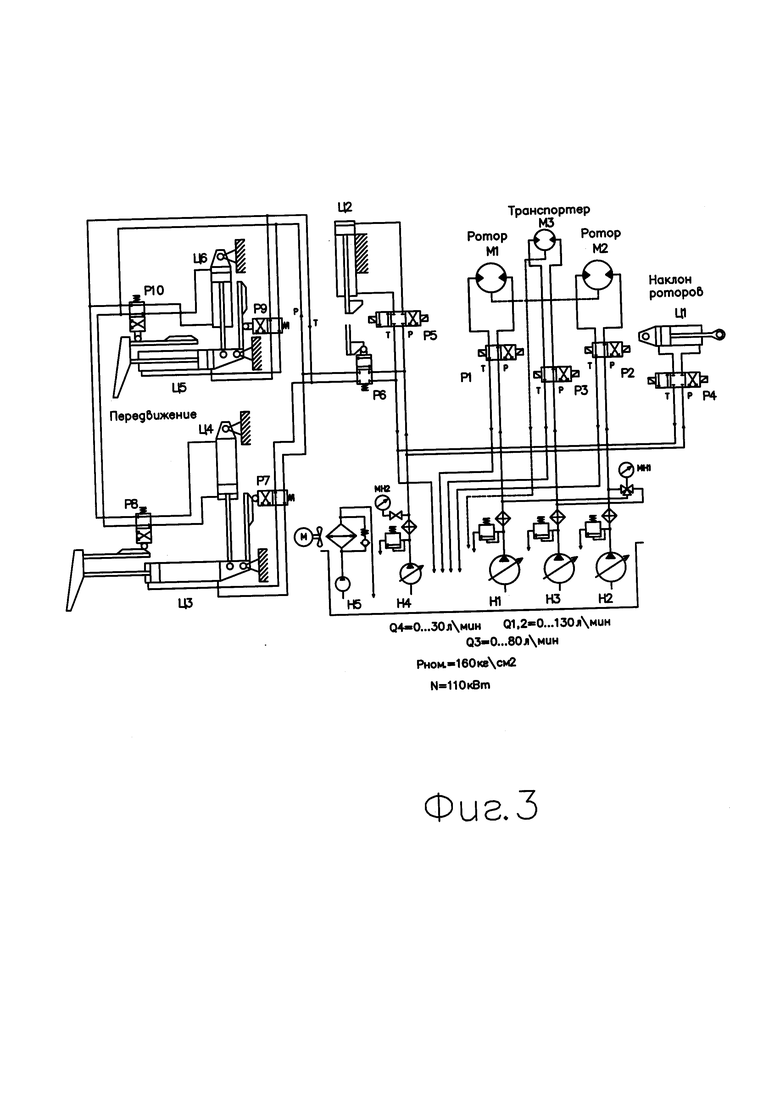
Фиг. 3 - принципиальная гидравлическая схема;
Фиг. 4 - графическое пояснение работы роторного экскаватора в режимах транспортирования, передвижения, закапывания и выхода из траншеи а так же сравнительные габаритные очертания известного и предлагаемого экскаватора.
Роторный экскаватор специального назначения содержит корпус 1, выполненный в виде хребтовой несущей балки коробчатого сечения с отсеками для топлива, масла, рабочей жидкости и аппаратуры управления, расположенную под хребтовой балкой, моторно-силовую установку 2, состоящую из дизеля, раздаточной коробки и блока регулируемых гидронасосов, нижнюю опорную лыжу 3, правый 4 и левый 5 ковшовые роторы опирающиеся на несущие рамы 6 через опорные катки 7. Внутри несущих рам установлены приводы вращения роторов 8 в виде гидромотора, редуктора и приводных звездочек.
В передней части каждого ротора установлен регулируемый защитный лист 9, по которому ковшами осуществляется транспортирование грунта в зону разгрузки.
Несущие рамы 6 в сборе с роторами при помощи горизонтальных шарниров 10 соединяются с проушинами корпуса 1. Между собой несущие рамы соединяет горизонтальный поперечный гидроцилиндр 11 (Ц1 на фиг. 3), изменением длины которого меняется угол наклона роторов в вертикальной плоскости.
На хребтовой балке корпуса сверху установлен поперечный реверсивный ленточный транспортер-отвалообразователь 12 с приводом от гидромотора.
Для регулирования дальности отбрасывания грунта транспортер снабжен отражателями 13.
Транспортер расположен таким образом, что роторы в верхней части охватывают его, и таким образом грунт из ковшей попадает на ленту.
В передней части роторных устройств по бокам машины имеются верхние опорные лыжи 14, закрепленные на центральной телескопической стойке 15 на переднем торце хребтовой несущей балки корпуса.
Размер по высоте между нижней опорной лыжей 3 и верхними опорными лыжами 14 регулируется вручную и определяет глубину отрываемой траншеи.
В задней части корпуса вдоль продольной оси машины установлено гидравлическое шаговое устройство 16 рабочего перемещения, состоящее из вертикальной направляющей 17 с гидроцилиндром подъема Ц2 (фиг. 3) и двух шарнирных гидравлических лап 18, каждая из которых снабжена своим цилиндром подъема Ц4, Ц6 и цилиндром перемещения Ц3, Ц5 соответственно.
Включение последовательных циклов подъема и перемещения лап осуществляется при механическом воздействии на соответствующие гидрораспределители Р7, Р8, Р9, Р10 в конце хода каждого механизма.
Цикл «шагания» запускается от распределителя Р6 при опускании шагового устройства 16 в нижнее положение.
В связи с тем, что гидропривод механизмов работает в теплонапряженном режиме, в верхней части хребтовой рамы установлен блок теплообменников 19 с принудительной циркуляцией рабочей жидкости. Управление роторным экскаватором осуществляется с дистанционного пульта по радиокомандам или по кабелю. В связи с этим роторный экскаватор снабжен соответствующим блоком системы управления 20.
Роторный экскаватор специального назначения работает следующим образом:
- После прибытия на объект и установки экскаватора на грунт запускается и прогревается дизель. Снимаются транспортные крепления. Затем обороты дизеля автоматически выставляются на режим, оптимальный для работы гидронасосов.
Далее оператор, управляя распределителем Р4 при помощи гидроцилиндра Ц1, разводит роторы в нижней части для увеличения поперечной устойчивости экскаватора.
Затем включив распределители Р1 и Р2 в режим «движение» оператор включает роторы в попутное направление вращения. При этом экскаватор начинает поступательное движение.
Управляя дистанционно производительностью насосов Н1 и Н2 оператор изменяет скорость движения экскаватора, либо осуществляет поворот.
Перед началом закапывания оператор включает насос Н3 и транспортер-отвалообразователь включается вправо или влево, в зависимости от положения распределителя Р3. Скорость транспортера и дальность отбрасывания грунта регулируется изменением производительности насоса Н3.
Далее при помощи гидроцилиндра Ц1 через распределитель Р4 роторы сводятся в V-образное положение.
Затем одновременно включаются гидромоторы М1 и М2 роторов в режим «копание», и гидроцилиндр Ц2 через распределитель Р5 опускает шаговое устройство рабочего перемещения.
При этом срабатывает распределитель Р6 и рабочее давление передается на каскад распределителей Р7-Р8-Р9-Р10, осуществляя управление попеременным циклическим движением гидроцилиндров Ц3-Ц4 и Ц5-Ц6.
В результате ковши начинают экскавацию грунта, а сам экскаватор начинает поступательное движение, осуществляя заглубление роторов.
Как только верхние опорные лыжи соприкоснутся с грунтом, заглубление роторов прекращается и начинается рытье траншеи.
Поворот при копании траншеи осуществляется изменением скорости вращения одного из роторов. Изменение поступательной скорости производится изменением производительности гидронасоса Н4.
Выход из траншеи после окончания работ осуществляется переводом роторов на попутное вращение переключением распределителей Р1 и Р2 из режима «копание» в режим «движение».
Предлагаемый роторный экскаватор специального назначения позволяет откапывать траншеи полного профиля глубиной до 1,5 метров в необводненных грунтах 2-4 категории со скоростью до 160 м/час, прокладывая трассу любой кривизны.
Потребляемая мощность около 110 кВт.
Количество обслуживающего персонала - 1 человек, находящийся вне рабочей зоны.
В рабочем положении экскаватор находится внутри траншеи и малозаметен на фоне общего рельефа местности.
Экскаватор может применяться как в инженерных войсках, так и в промышленном и гражданском строительстве.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНШЕЙНАЯ ГУСЕНИЧНАЯ МАШИНА | 1998 |
|
RU2148126C1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ТРАНШЕЙНО-КОТЛОВАННОЙ МАШИНЫ И ОПОРНАЯ КОНСТРУКЦИЯ ДЛЯ РАБОЧЕГО ОБОРУДОВАНИЯ | 2008 |
|
RU2371551C1 |
| Щебнеочистительная машина | 2024 |
|
RU2839787C1 |
| ЭКСКАВАТОР ТРАНШЕЙНЫЙ РОТОРНЫЙ | 2007 |
|
RU2363817C2 |
| Траншейный экскаватор | 1976 |
|
SU658237A1 |
| Щебнеочистительная машина | 2024 |
|
RU2831848C1 |
| Роторный траншейный экскаватор | 1954 |
|
SU104698A1 |
| Роторный траншейный экскаватор | 1987 |
|
SU1469042A1 |
| Рабочий орган роторного экскаватора | 1974 |
|
SU631600A1 |
| ЗЕМЛЕРОЙНАЯ МАШИНА | 1991 |
|
RU2046890C1 |
Изобретение относится к специальным землеройным машинам. Рабочий орган выполнен в виде двух раздельно управляемых расположенных V-образно роторов с возможностью изменения угла их наклона в вертикальной плоскости на противоположный. Приводы вращения роторов выполнены реверсивными, что позволяет их использовать в качестве ходовых колес при транспортировании в пределах рабочей зоны. Механизм рабочего перемещения выполнен в виде двух работающих в противофазе в автоматическом режиме гидравлических упоров, поочередно заглубляемых в грунт на дне траншеи. Моторно-силовая установка размещена между рабочим органом и механизмом рабочего перемещения, содержит дизель и дистанционно управляемые оператором гидронасосы. Корпус выполнен в виде хребтовой балки коробчатого сечения, отсеки которой являются емкостями для топлива, масла, гидравлической рабочей жидкости и аппаратуры дистанционного управления. Роторный рабочий орган снабжен регулируемыми по высоте лыжными опорами, ограничивающими заглубление роторов. Достигается уменьшение габаритов, упрощение конструкции машины и повышение уровня безопасности оператора. 4 з.п. ф-лы, 4 ил. 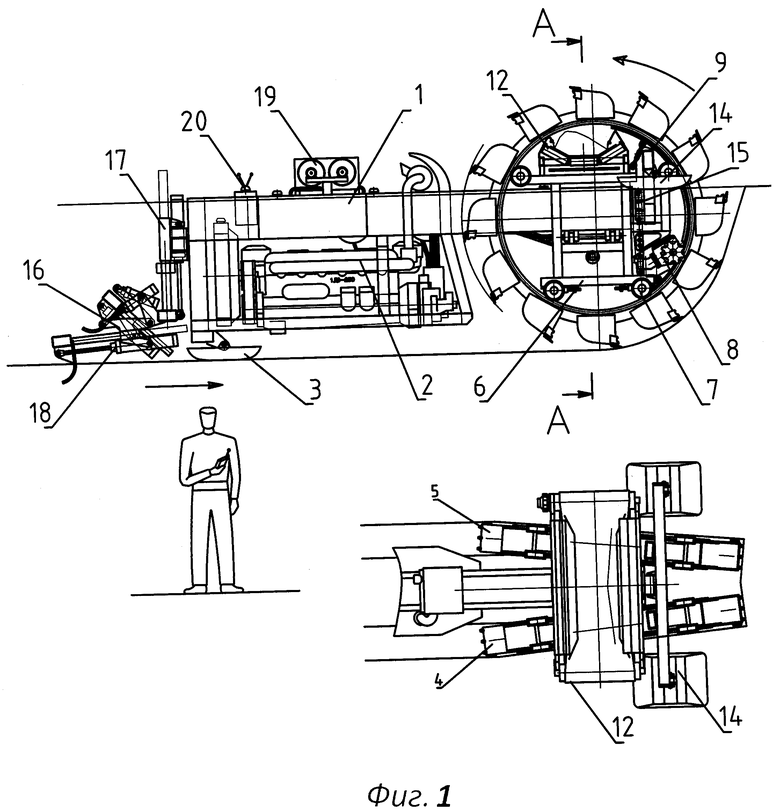
1. Роторный экскаватор специального назначения, содержащий корпус, моторно-силовую установку, роторный рабочий орган с поперечным транспортером, систему дистанционного управления и механизм рабочего перемещения, отличающийся тем, что рабочий орган выполнен в виде двух раздельно управляемых расположенных V-образно роторов с возможностью изменения угла их наклона в вертикальной плоскости на противоположный, а приводы вращения роторов выполнены реверсивными, что позволяет их использовать в качестве ходовых колес при транспортировании в пределах рабочей зоны.
2. Роторный экскаватор специального назначения по п. 1, отличающийся тем, что механизм рабочего перемещения выполнен в виде двух работающих в противофазе в автоматическом режиме гидравлических упоров, поочередно заглубляемых в грунт на дне траншеи.
3. Роторный экскаватор специального назначения по п. 1, отличающийся тем, что моторно-силовая установка размещена между рабочим органом и механизмом рабочего перемещения, содержит дизель и дистанционно управляемые оператором гидронасосы.
4. Роторный экскаватор специального назначения по п. 1, отличающийся тем, что корпус выполнен в виде хребтовой балки коробчатого сечения, отсеки которой являются емкостями для топлива, масла, гидравлической рабочей жидкости и аппаратуры дистанционного управления.
5. Роторный экскаватор специального назначения по п. 1, отличающийся тем, что роторный рабочий орган снабжен регулируемыми по высоте лыжными опорами, ограничивающими заглубление роторов.
| ТРАНШЕЙНАЯ ГУСЕНИЧНАЯ МАШИНА | 1998 |
|
RU2148126C1 |
| Рабочий орган многоковшового траншейного экскаватора | 1985 |
|
SU1263765A1 |
| Гидропривод землеройной машины | 1990 |
|
SU1810444A1 |
| ТРАНШЕЙНЫЙ ЭКСКАВАТОР ДЛЯ ВСКРЫТИЯ УЛОЖЕННОГО В ГРУНТ ТРУБОПРОВОДА | 0 |
|
SU257355A1 |
| Траншейный экскаватор для вскрытия подземных трубопроводов | 1984 |
|
SU1198166A1 |
| CN 117266283 A, 22.12.2023. | |||

