Изобретение относится к машинам для вскрытия уложенных в грунт трубопроводов и может найти применение при ремонте магистральных трубопроводов.
Известна землеройная машина, включающая базовую машину и рабочее оборудование с многоковшовыми рабочими органами (SU524882, E02 F5/08, 1976). Недостаток известной землеройной машины заключается в том, что разводные рабочие органы в виде роторов с вертикальными осями отрывают траншею большой ширины, что увеличивает объем работы и энергозатраты на ее выполнение. Кроме того, в известном устройстве не обеспечивается удаление грунта из траншеи и освобождение трубопровода.
Наиболее близкой к предлагаемому изобретению по технической сущности и, принятая заявителем в качестве прототипа, является землеройная машина для разработки грунта под трубопроводом, содержащая базовую машину и рабочее оборудование с многоковшовым рабочим органом и отвальным транспортирующим механизмом (SU960392, E02 F5/08, 1982). Вторая известная землеройная машина содержит два рабочих органа в виде роторов с ковшами и отвального транспортирующего механизма, что обеспечивает отрывку траншеи и удаление грунта. Однако для удаления грунта под трубопроводом необходимо двум рабочим в ручном режиме подкапывать участок траншеи под трубопроводом и монтировать цепные фрезы. Это увеличивает трудоемкость работы и увеличивает количество необходимых работников. Кроме того, для обеспечения выполнения монтажных работ в траншее ее ширину необходимо заведомо увеличивать и это также увеличивает трудоемкость и снижает производительность. Необходимо отметить сложность кинематической структуры известной машины, что снижает ее надежность, а большая материалоемкость повышает стоимость изготовления.
Целью предлагаемого изобретения является устранение или уменьшение недостатков известных технических решений. Техническая задача, решаемая предлагаемым изобретением, заключается в исключении необходимости выполнять в ручном режиме операции рабочего процесса при удалении грунта под трубопроводом, путем механизации всех элементов рабочего процесса. Кроме того, упрощается кинематическая структура землеройной машины. Технический результат - повышение производительности и надежности.
Решение поставленной технической задачи и достижение технического результата достигается тем, что землеройная машина, включающая базовую машину и рабочее оборудование с многоковшовым рабочим органом и отвальным транспортирующим механизмом, снабжена поворотной колонкой с приводами углового и осевого перемещения, шнековой фрезой с приводом, горизонтальной и вертикальными щетками с приводами вращения, и датчиками перемещения.
Рабочий орган выполнен в виде ротора, содержащего две цилиндрические секции, соединенные телескопически и гидроцилиндром осевого перемещения, а к секциям ротора радиально прикреплены раздвижные рукояти с ковшами, причем ротор установлен на опорных и упорных катках, соединен с приводом вращения, а внутри его установлен отвальный транспортирующий механизм.
В задней части базовой машины установлена поворотная колонка с приводами углового и осевого перемещения, а в нижней части поворотной колонки установлена шнековая фреза с приводом вращения, горизонтальная и вертикальные щетки с приводами вращения и датчики перемещения.
Предлагаемое изобретение отличается от прототипа совокупностью отличительных признаков, приведенных в отличительной части формулы изобретения. Так, в задней части базовой машины установлена поворотная колонка со шнековой фрезой, что обеспечивает механизацию всех элементов рабочего процесса удаления грунта под трубопроводом и исключает их выполнение в ручном режиме. Выполнение рабочего органа в виде полого ротора, соединенного полыми рукоятями с ковшами, упрощает кинематическую схему, повышает его прочность и надежность.
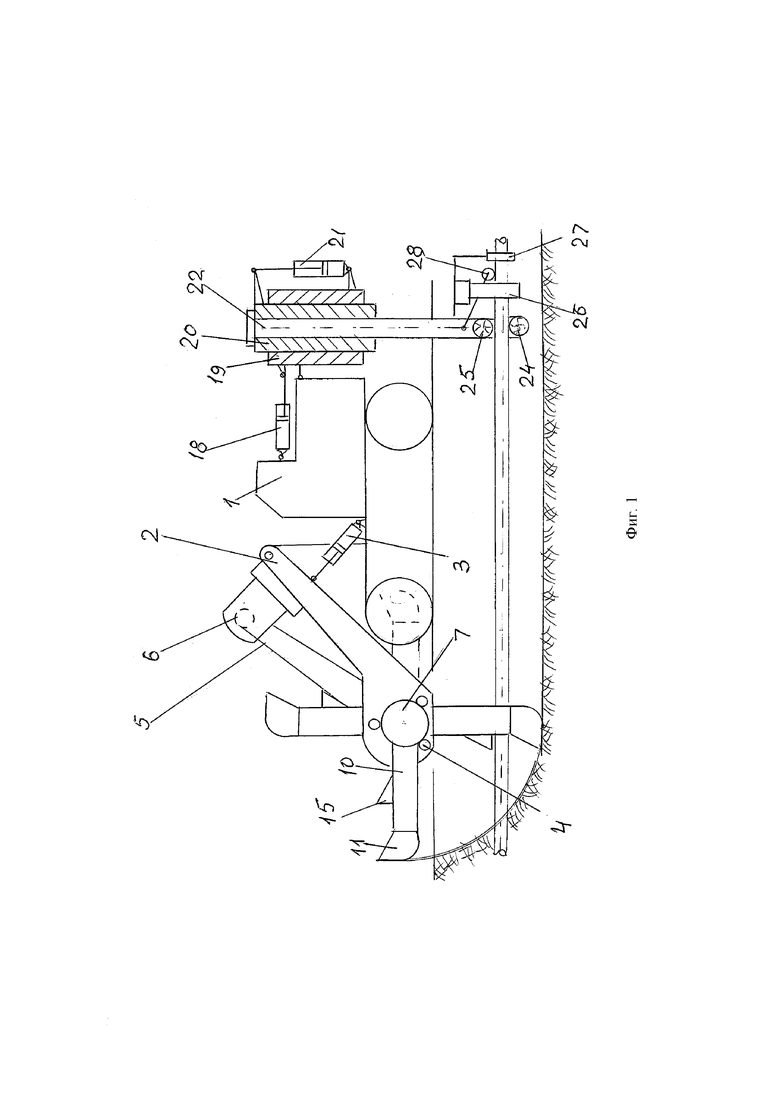
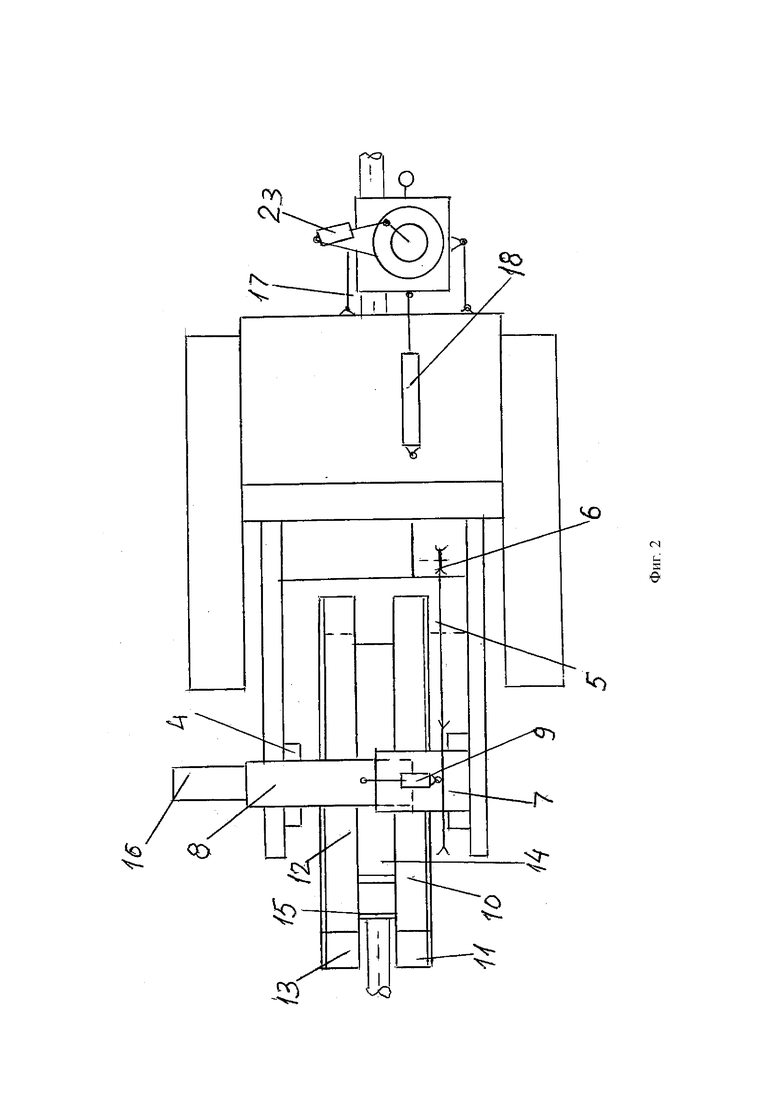
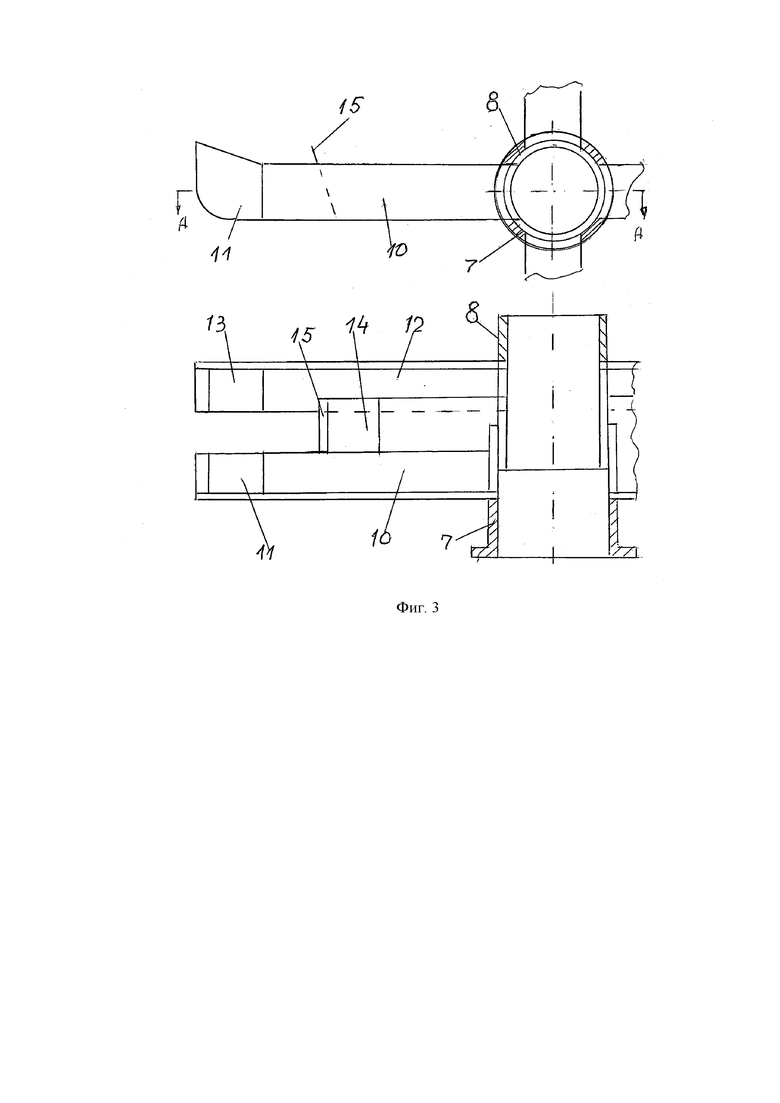
На фиг. 1 изображена землеройная машина, вид сбоку; на фиг. 2 - то же, вид сверху; на фиг. 3 изображен рабочий орган.
Землеройная машина содержит базовую машину 1, в передней части которой шарнирно установлена стрела 2 с гидроцилиндрами 3 привода подъема. На стреле на упорных и опорных роликах 4 установлен передний рабочий орган, соединенный цепной передачей 5 с приводом вращения 6. Передний рабочий орган выполнен в виде ротора, содержащего наружную секцию 7 и телескопически в направляющих установленную внутреннюю секцию 8. Ротор выполнен с возможностью осевого перемещения внутренней секции 8 гидроцилиндром 9 привода. К ротору радиально прикреплены раздвижные рукояти с ковшами. Каждая рукоять содержит секцию 10 с ковшом 11, прикрепленную к наружной секции 7 ротора и вторую секцию 12 с ковшом 13, прикрепленную к внутренней секции 8 ротора. Между секциями рукоятей 10 и 12 к секции 7 ротора прикреплена регулируемая вставка 14 с режущим ножом 15 для срезания грунта над трубопроводом. Поперечное сечение рукояти может быть выполнено коробчатым с верхней стенкой или корытообразным без верхней стенки. Ковши выполнены без задних стенок и сообщены с полостями рукоятей, которые сообщены через проемы с внутренней полостью ротора. Внутри ротора установлен отвальный транспортирующий механизм 16, например, шнековый или ленточный транспортер. Раздвижные секции ротора и рукоятей с гидроцилиндром 9 привода позволяют использовать землеройную машину для отрывки трубопроводов, имеющих различные диаметры. В задней части базовой машины шарнирно на рычагах 17 установлен задний рабочий орган с гидроцилиндром 18 привода подъема. Задний рабочий орган содержит корпус 19, с установленной в направляющих гильзой 20 и гидроцилиндр подъема 21. В гильзе установлена поворотная колонка 22 с приводом углового поворота в виде гидроцилиндра 23. На нижнем конце поворотной колонки 22 установлена шнековая фреза 24 с приводом вращения, горизонтальная 25 и вертикальные щетки 26 с приводами вращения. Кроме того на поворотной колонке установлены датчики бокового перемещения 27 и датчик вертикального перемещения 28. Датчики соединены электролиниями с показывающими приборами со световыми и звуковыми сигнализаторами, размещенными в кабине машиниста.
Землеройная машина действует следующим образом.
В исходном положении землеройная машина неподвижно установлена над трубопроводом, а передний и задний рабочие органы подняты и удерживаются гидроцилиндрами. Работа начинается включением вращения переднего рабочего органа в неподвижном положении базовой машины. При опускании гидроцилиндрами 3 вращающегося ротора ковши 11 и 13 вырезают грунт, который при подъеме рукояти перемещается по ее полости в полость ротора и транспортируется отвальным механизмом 16 в отвал. При дальнейшем заглублении рабочего органа режущие ножи 15 срезают грунт над трубопроводом, также поступающий в полость ротора. Заглубление переднего рабочего органа прекращается, когда он занимает рабочее положение, при котором ковши 11 и 13 удалили грунт с боковых сторон ниже трубопровода, а режущие ножи 15 удалили грунт над трубопроводом. Затем включается ходовое оборудование и производится отрывка траншеи на расстояние, позволяющее опустить в траншею задний рабочий орган. Перед опусканием заднего рабочего органа гидроцилиндром 23 устанавливается положение шнековой фрезы 24 параллельно трубопроводу. Гидроцилиндром 18 производится опускание поворотной колонки 22 в рабочее положение, при котором шнековая фреза 24 расположена в траншее сбоку и ниже трубопровода, параллельно ему. В том случае, если необходимо удалять грунт под трубопроводом, то включается привод вращения шнековой фрезы 24 и производится медленный ее поворот гидроцилиндром 23 в положение перпендикулярное трубопроводу. Высотное положение шнековой фрезы 24 относительно нижней кромки трубопровода регулируется и устанавливается гидроцилиндром 21. Установленное положение воспринимается датчиком перемещения 28 и установкой нулевой отметки показывающего прибора в кабине машиниста. Одновременно устанавливаются датчики 27 бокового перемещения с установкой нулевой отметки в курсовом показывающем приборе, расположенном в кабине машиниста. Далее включаются приводы вращения щеток 25 и 26 и ходовое оборудование базовой машины. На рабочей скорости производится отрывка траншеи и освобождение трубопровода в непрерывном режиме. Щетки 25 и 26 производят очистку трубопровода от остатков грунта, что повышает точность и надежность действия датчиков перемещения. Управление рабочим процессом облегчается за счет использования датчиков перемещения и показывающих приборов в кабине машиниста. При изменении высотного положения шнековой фрезы 24 относительно трубопровода, датчик 28 вызывает смещение стрелки показывающего прибора относительно нулевой отметки с одновременной подачей светового и звукового сигналов. Аналогичным образом облегчается управление движения по курсу датчиками 27 при боковом смещении относительно трубопровода. Возможно также осуществить автоматическое управление рабочим процессом, путем установки электроуправляемых гидрораспределителей.
Таким образом, предлагаемая землеройная машина, в сравнении с прототипом, обеспечивает механизацию всех элементов рабочего процесса удаления грунта под трубопроводом, что исключает выполнение работ в ручном режиме, сокращает количество необходимых работников и повышает производительность. Одновременно упрощается конструкция рабочего органа и повышается его надежность. Кроме того, облегчается управление рабочим процессом, а это снижает утомляемость машиниста и также способствует повышению производительности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Траншейный экскаватор для вскрытия подземных трубопроводов | 1984 |
|
SU1198166A1 |
| Устройство для рытья траншей под лежащим на грунте трубопроводом | 1983 |
|
SU1135859A1 |
| Рабочий орган многоковшового траншейного экскаватора | 1985 |
|
SU1263765A1 |
| Рабочее оборудование одноковшового экскаватора | 2023 |
|
RU2808751C1 |
| АГРЕГАТ ДЛЯ ВСКРЫТИЯ, ПОДКОПА И УДАЛЕНИЯ ГРУНТА ИЗ-ПОД ТРУБОПРОВОДА | 1992 |
|
RU2034960C1 |
| ЭКСКАВАТОР ДЛЯ ВСКРЫТИЯ ТРУБОПРОВОДОВ | 2019 |
|
RU2729632C1 |
| Устройство для засыпки трубопровода | 1978 |
|
SU855137A1 |
| Рабочее оборудование одноковшового гидравлического экскаватора | 2023 |
|
RU2834359C1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ | 1991 |
|
RU2049859C1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ТРАНШЕЕКОПАТЕЛЯ | 1991 |
|
RU2047691C1 |
Изобретение относится к машинам для вскрытия уложенных в грунт трубопроводов и может найти применение при ремонте магистральных трубопроводов. Землеройная машина включает базовую машину и рабочее оборудование с многоковшовым рабочим органом и отвальным транспортирующим механизмом, дополнительно в задней части базовой машины установлена поворотная колонка с приводами углового и осевого перемещения, а в нижней части поворотной колонки (22) установлена шнековая фреза (24) с приводом вращения, горизонтальная и вертикальная щетки (25) и (26) с приводами вращения и датчики перемещения (27), а многоковшовый рабочий орган расположен в передней части базовой машины и выполнен в виде ротора, содержащего две цилиндрические секции, соединенные друг с другом телескопически и гидроцилиндром осевого перемещения, при этом к цилиндрическим секциям ротора радиально прикреплены раздвижные рукояти с ковшами, а ротор установлен на опорных и упорных роликах и соединен с приводом его вращения, а отвальный транспортирующий механизм установлен внутри ротора. Технический результат – повышение производительности и надежности землеройной машины. 3 ил.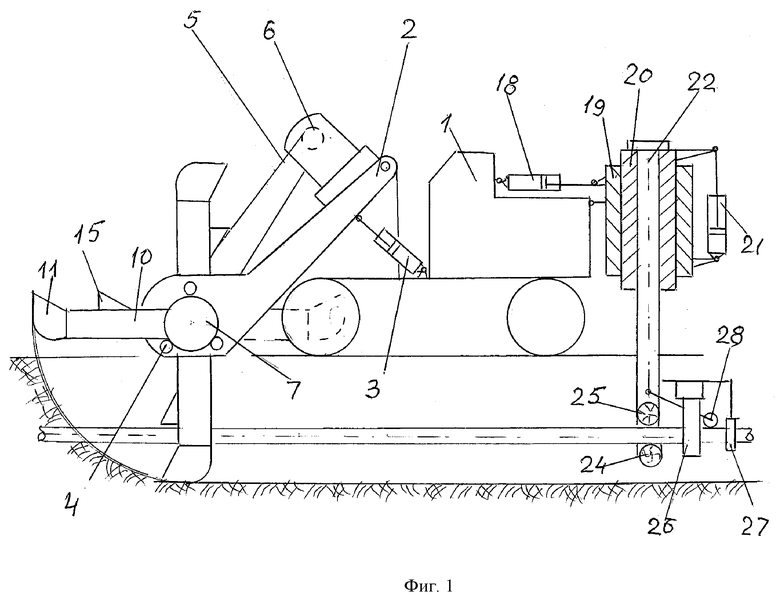
Землеройная машина, включающая базовую машину и рабочее оборудование с многоковшовым рабочим органом и отвальным транспортирующим механизмом, отличающаяся тем, что дополнительно в задней части базовой машины установлена поворотная колонка с приводами углового и осевого перемещения, а в нижней части поворотной колонки установлена шнековая фреза с приводом вращения, горизонтальная и вертикальная щетки с приводами вращения и датчики перемещения, а многоковшовый рабочий орган расположен в передней части базовой машины и выполнен в виде ротора, содержащего две цилиндрические секции, соединенные друг с другом телескопически и гидроцилиндром осевого перемещения, при этом к цилиндрическим секциям ротора радиально прикреплены раздвижные рукояти с ковшами, а ротор установлен на опорных и упорных роликах и соединен с приводом его вращения, а отвальный транспортирующий механизм установлен внутри ротора.
| Землеройная машина для разработки грунта под трубопроводом | 1980 |
|
SU960392A1 |
| НАВЕСНОЕ ОБОРУДОВАНИЕ К ТРАКТОРУ ДЛЯ ВСКРЫТИЯ ТРУБОПРОВОДОВ | 0 |
|
SU172249A1 |
| Устройство для рытья траншей под лежащим на грунте трубопроводом | 1983 |
|
SU1135859A1 |
| Траншейный экскаватор для вскрытия подземных трубопроводов | 1984 |
|
SU1198166A1 |
| АГРЕГАТ ДЛЯ ВСКРЫТИЯ, ПОДКОПА И УДАЛЕНИЯ ГРУНТА ИЗ-ПОД ТРУБОПРОВОДА | 1992 |
|
RU2034960C1 |
| Рабочее оборудование одноковшового экскаватора | 2023 |
|
RU2808751C1 |
| JPS 5042508 U, 30.04.1975. | |||

