Изобретение относится к землеройным машинам, а конкретно к рабочему оборудованию одноковшовых экскаваторов и может найти применение при ремонте магистральных трубопроводов для отрывки труб.
Известно устройство для подкопа трубопроводов, содержащее базовую машину с рабочим оборудованием одноковшового гидравлического экскаватора, включающего стрелу, рукоять, ковш с гидроприводами и рабочий орган, для отрывки трубопроводов и средство ориентации рабочего органа относительно трубопровода (RU 2 170 307 E02F5/10). Рабочий орган для подкопа трубопровода в известном устройстве выполнен в виде коробки с режущими зубьями на передней кромке, установленной внутри ковша и выступающей из него. Недостатки известного технического решения заключаются в низкой производительности и в сложности управления рабочим процессом. Удаление грунта под трубопроводом производится путем повторяющихся движений рукояти с ковшом в поперечном направлении относительно оси трубопровода. Поэтому при выполнении каждого рабочего цикла машинисту необходимо ориентировать рабочий орган относительно трубопровода и перемещать его, осуществляя много управляющих воздействий, управляя ковшом, рукоятью, стрелой и ходом базовой машины. Это занимает много времени и снижает производительность, а кроме того, усложняет управление рабочим процессом и утомляет машиниста, что также ведет к уменьшению производительности.
Известно и другое рабочее оборудование одноковшового экскаватора, наиболее близкое по технической сущности к заявляемому изобретению и принятое заявителем в качестве прототипа. Второе известное устройство содержит стрелу, рукоять, ковш с гидроприводами, рабочий орган для отрывки трубопроводов и средство ориентации рабочего органа относительно трубопровода (RU 2 520 307, E02F 3/28). Во втором известном устройстве операции разрушения и удаления грунта из под трубопровода разделены и на их выполнение затрачивается несколько меньше времени, в сравнении с первым известным устройством. Однако управление рабочим процессом остается довольно сложным, поскольку машинисту после каждого рабочего цикла, содержащего возвратно поступательное поперечное движение скалывающего рабочего органа, необходимо перемещать рабочее оборудование вдоль трубопровода. Это увеличивает количество управляющих воздействий на органы управления, увеличивает длительность рабочего цикла, снижает производительность и утомляет машиниста. Кроме того, откидной ограничитель вертикального перемещения рабочего органа не обеспечивает надежной его ориентации относительно трубопровода. Поскольку на трубопроводе под рычагом 4 неизбежно остаются фрагменты грунта и это обусловливает опасное приближение рабочего органа к трубопроводу и его повреждение.
Целью предлагаемого изобретения является уменьшение или устранение недостатков известных технических решений. Техническая задача, решаемая предлагаемым изобретением, заключается в использовании рабочего органа, обеспечивающего непрерывный рабочий процесс разрушения и удаления грунта из под трубопровода, с существенным сокращением необходимых управляющих воздействий машиниста. Технический результат – повышение производительности и упрощение управления рабочим процессом.
Решение поставленной задачи и достижение технического результата обеспечивается тем, что рабочее оборудование одноковшового экскаватора, содержащее стрелу, рукоять, ковш с гидроприводами, рабочий орган для отрывки трубопроводов и средство ориентации рабочего органа относительно трубопровода, снабжено дополнительной рукоятью с гидроцилиндром привода, регулируемым гидродвигателем, гидроцилиндром управления, датчиками горизонтального и вертикального перемещения.
К штатной рукояти соосно установлена дополнительная рукоять с, консольно-установленным на ее нижнем конце, рабочим органом для отрывки трубопровода, выполненного в виде шнековой фрезы и проволочной щетки с приводами вращения, а гидроцилиндр привода дополнительной рукояти сообщен гидролиниями с четырехпозиционным гидрораспределителем, выполненным с возможностью сообщения, в одной из позиций золотника, штоковой полости гидроцилиндра со штоковой полостью гидроцилиндра управления, в поршневой полости которого установлен упругий элемент с механизмом регулирования силы упругости, а шток гидроцилиндра управления шарнирно соединен с органом управления регулируемого гидродвигателя привода ходового оборудования базовой машины.
Датчики перемещения установлены на дополнительной рукояти с возможностью односторонней связи с трубопроводом и контакты датчика вертикального перемещения соединены электролиниями с катушками электроуправляемого гидрораспределителя привода подъема стрелы и со светозвуковыми сигнализаторами, а контакты датчика бокового горизонтального перемещения соединены электролиниями со светозвуковыми сигнализаторами бокового смещения.
Предложенное рабочее оборудование одноковшового экскаватора отличается от прототипа совокупностью отличительных признаков, приведенных в отличительной части формулы изобретения. Так, в предложенном рабочем оборудовании используется рабочий орган для разрушения и удаления грунта из под трубопровода в виде шнековой фрезы и это обеспечивает непрерывное выполнение указанной операции с одновременным упрощением и облегчением управления рабочим процессом. Электрические датчики вертикального и горизонтального перемещения обеспечивают надежную ориентацию рабочего органа относительно трубопровода.
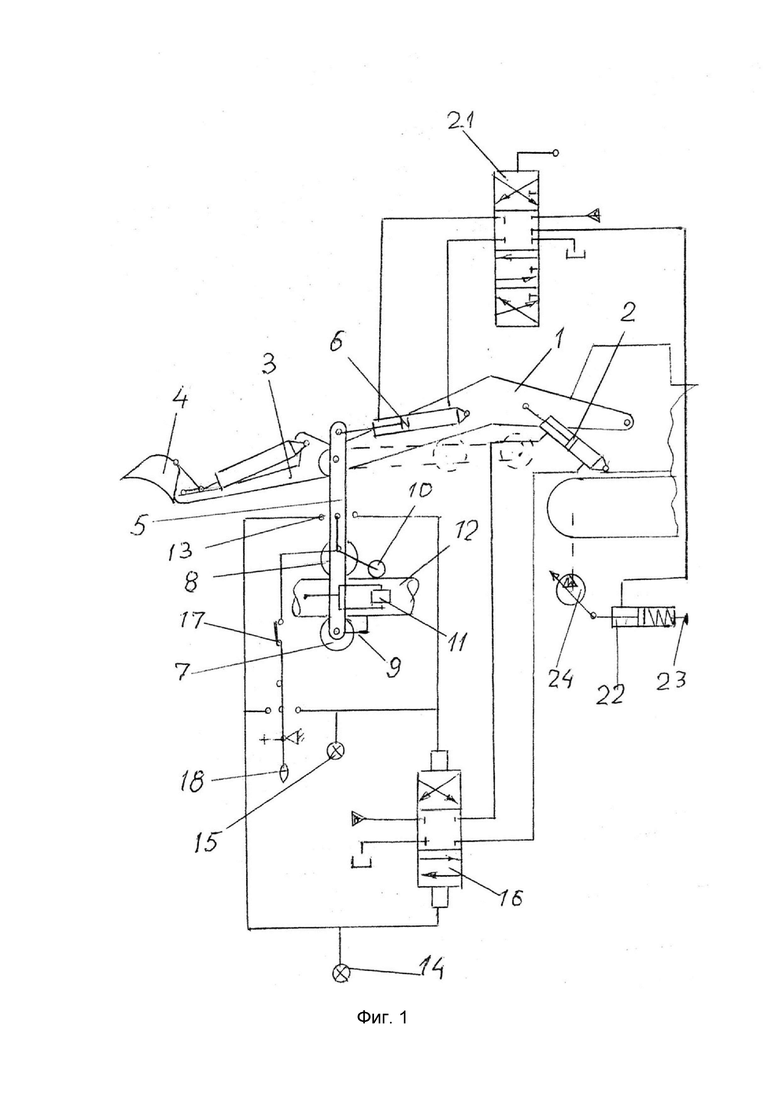
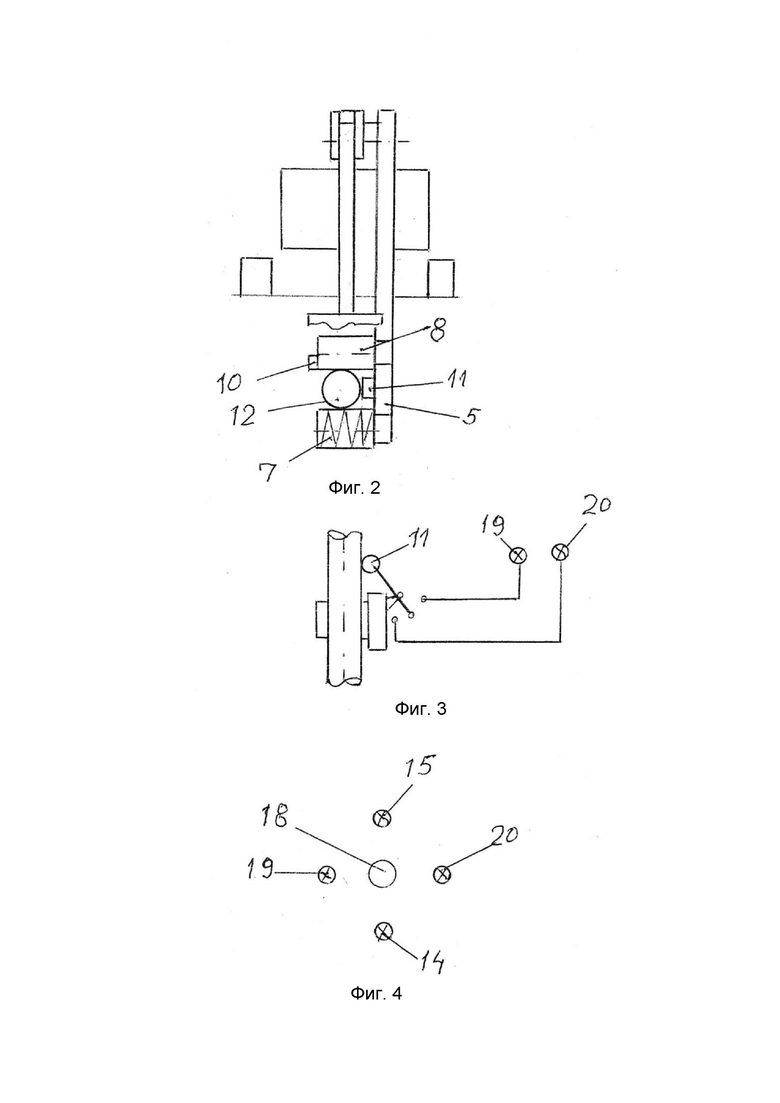
На фиг. 1 изображено рабочее оборудование одноковшового экскаватора, вид сбоку; на фиг. 2 – то же, вид спереди; на фиг. 3 – датчик бокового перемещения рабочего органа; на фиг. 4 – размещение светозвуковых сигнализаторов на пульте управления в кабине машиниста.
Рабочее оборудование одноковшового экскаватора (фиг. 1, 2), содержит стрелу 1, соединенную шарнирно и гидроцилиндром 2 привода с базовой машиной. К стреле 1 шарнирно прикреплена штатная рукоять 3 с ковшом 4 и гидроприводами. Соосно со штатной рукоятью 3 на стреле 1 установлена дополнительная рукоять 5 с гидроцилиндром 6 привода. В нижней части дополнительной рукояти 5 установлен дополнительный рабочий орган, включающий шнековую фрезу 7 и металлическую проволочную щетку 8 с приводами вращения, например гидродвигателями. Кроме того, на дополнительной рукояти установлен ограничитель 9, а также датчики вертикального 10 и горизонтального 11 перемещения рабочего органа, с возможностью односторонней связи с трубопроводом 12. Контакты 13 датчика вертикального перемещения 10 соединены электролиниями со светозвуковыми сигнализаторами 14, 15 и с катушками управления гидрораспределителя 16, соединенного гидролиниями с гидроцилиндром 2 привода стрелы. В цепи управления гидрораспределителя 16 имеется выключатель 17 и пульт ручного управления 18. Контакты датчика 11 бокового перемещения соединены электролиниями со светозвуковыми сигнализаторами 19 и 20 бокового смещения рабочего органа (фиг. 3, 4). Гидроцилиндр 6 привода дополнительной рукояти сообщен гидролиниями с четырехпозиционным гидрораспределителем 21, выполненным с возможностью сообщения в одной из позиций золотника, штоковой полости со штоковой полостью гидроцилиндра управления 22. В поршневой полости гидроцилиндра 22 установлен упругий элемент и механизм 23 регулирования его упругости, а шток соединен шарнирно с органом управления регулируемого гидродвигателя 24 привода ходового оборудования базовой машины.
Рабочее оборудование одноковшового экскаватора действует следующим образом.
В исходное положение базовая машина и рабочее оборудование устанавливаются вдоль трубопровода. Затем, используя штатное рабочее оборудование одноковшового экскаватора, производится разработка грунта над трубопроводом, а также с боков ниже уровня опирания. Причем одна боковая выемка выполняется большей глубины для последующего размещения грунта, вырезаемого из под трубопровода. Для разработки грунта под трубопроводом штатная рукоять 3 поднимается, а дополнительная рукоять 5 из походного положения, изображенного прерывистыми линиями на фиг. 1, переводится в рабочее положение, показанное сплошными линиями. При включенных приводах вращения, щетки 8 и шнековой фрезы 7, боковым смещением стрелы 1, рабочий орган устанавливают в положение, изображенное на фиг. 1. Грунт, вырезаемый шнековой фрезой, перемещается в полость, ранее выполненной, более глубокой боковой выемки. Перемещение и положение рабочего органа относительно трубопровода контролируется датчиками вертикального 10 и горизонтального 11 перемещения, а информация поступает на светозвуковые сигнализаторы в кабине машиниста. После установки рабочего органа включается привод ходового оборудования базовой машины, а золотник гидрораспределителя 21 переводится в позицию, сообщающую штоковые полости гидроцилиндров 6 и 22, что обеспечивает автоматическое регулирование скорости базовой машины в зависимости от величины нагрузки на рабочий орган. Так, например, в случае разработки участка грунта, имеющего повышенную прочность, увеличивается фронтальное силовое воздействие на фрезу 7 и дополнительную рукоять 5. Одновременно повышается давление рабочей жидкости в штоковой полости гидроцилиндра 6 и в сообщенной с ней штоковой полости гидроцилиндра 22. Поэтому шток гидроцилиндра 22, преодолевая усилие упругого элемента, втягивается и воздействует на орган управления гидродвигателя 23, уменьшая его скорость и скорость базовой машины. Также в автоматическом режиме производится регулирование вертикального положения рабочего органа относительно трубопровода с помощью датчика 10 вертикального положения, ролик которого перемещается по поверхности трубопровода зачищенной щеткой 8. Ограничитель 9 предотвращает контакт и повреждение трубопровода фрезой 7. Единственной операцией, выполняемой машинистом в ручном режиме, является операция регулирования бокового смещения рабочего органа, однако и она существенно облегчается использованием датчика 11 и светозвуковых сигнализаторов 19 и 20.
Таким образом, в сравнении с прототипом, применение предлагаемого рабочего оборудования обеспечивает непрерывный процесс разработки грунта под трубопроводом, в отличии от прототипа, где рабочий орган совершает периодические поперечные движения с периодическими остановками и перемещениями базовой машины. Это повышает производительность и одновременно упрощает и облегчает управление рабочим процессом.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭКСКАВАТОР ДЛЯ ВСКРЫТИЯ ТРУБОПРОВОДОВ | 2019 |
|
RU2729632C1 |
| Способ копания одноковшовым гидравлическим экскаватором и одноковшовый гидравлический экскаватор | 1982 |
|
SU1016433A1 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР | 2019 |
|
RU2719698C1 |
| Землеройная машина | 2024 |
|
RU2834358C1 |
| Рабочее оборудование одноковшового экскаватора | 1982 |
|
SU1027338A1 |
| Гидропривод экскаватора | 1981 |
|
SU1028792A1 |
| Способ копания одноковшовым экскаватором и устройство для его осуществления | 1976 |
|
SU749988A1 |
| Ковш экскаватора | 2024 |
|
RU2834357C1 |
| Экскаватор | 2022 |
|
RU2806786C1 |
| Рабочее оборудование экскаватора | 1986 |
|
SU1435718A1 |
Изобретение относится к рабочему оборудованию одноковшовых экскаваторов, и может найти применение для отрывки труб при ремонте магистральных трубопроводов. Техническим результатом является повышение производительности и упрощение управления рабочим процессом. Рабочее оборудование одноковшового экскаватора, включает стрелу, рукоять, ковш с гидроприводами, рабочий орган для отрывки трубопроводов и средство ориентации рабочего органа относительно трубопровода. Рабочее оборудование снабжено дополнительной рукоятью с гидроцилиндром привода, регулируемым гидродвигателем, гидроцилиндром управления, датчиками горизонтального и вертикального перемещения. Дополнительная рукоять шарнирно и соосно устанеовлена со штатной рукоятью с консольно-установленным на ее нижнем конце рабочим органом для отрывки трубопровода, выполненным в виде шнековой фрезы и проволочной щетки с приводами вращения. Гидроцилиндр привода дополнительной рукояти сообщен гидролиниями с четырехпозиционным гидрораспределителем, выполненным с возможностью сообщения, в одной из позиций золотника, со штоковой полостью гидроцилиндра управления, в поршневой полости которого установлен упругий элемент с механизмом регулирования силы упругости. Шток гидроцилиндра управления шарнирно соединен с органом управления регулируемого гидродвигателя привода ходового оборудования базовой машины. Датчики перемещения установлены на дополнительной стреле с возможностью односторонней связи с трубопроводом и контакты датчика вертикального перемещения соединены электролиниями с катушками электроуправляемого гидрораспределителя привода подъема стрелы и со светозвуковыми сигнализаторами. Контакты датчика бокового горизонтального перемещения соединены электролиниями со светозвуковыми сигнализаторами бокового смещения. 1 з.п. ф-лы, 4 ил.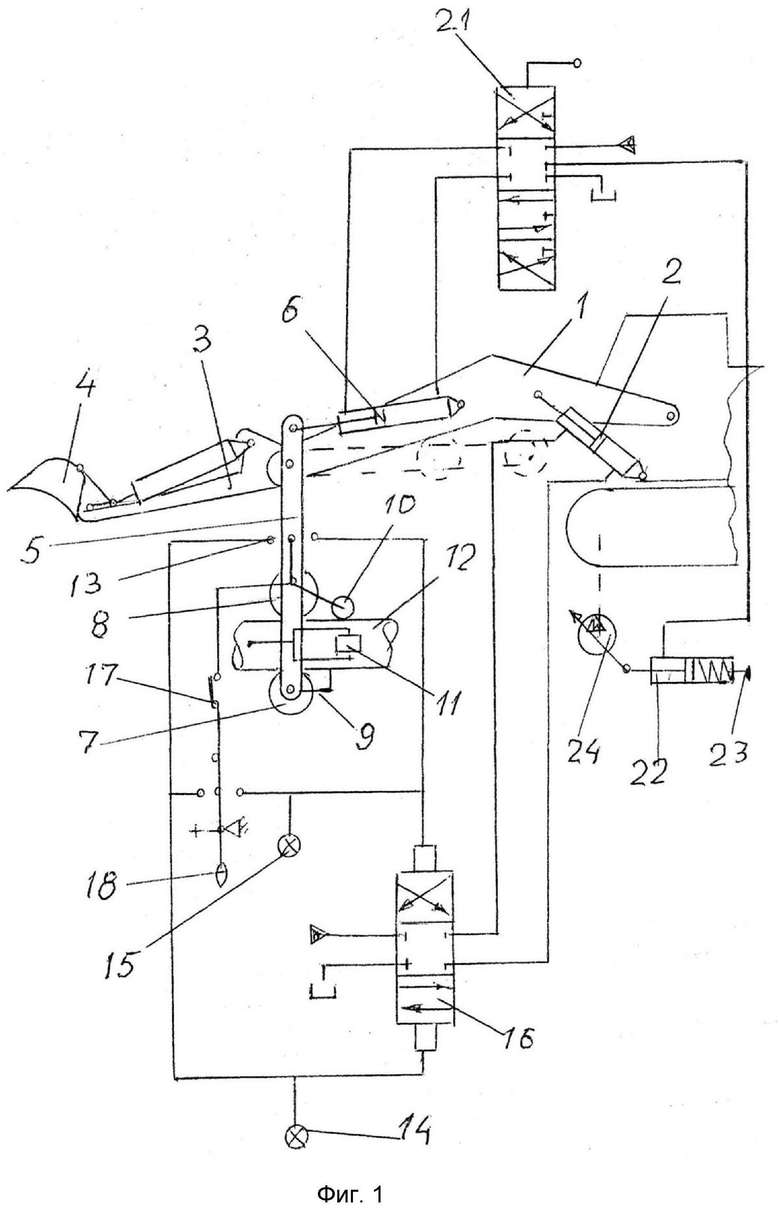
1. Рабочее оборудование одноковшового экскаватора, содержащее стрелу, рукоять, ковш с гидроприводами, рабочий орган для отрывки трубопроводов и средство ориентации рабочего органа относительно трубопровода, отличающееся тем, что оно снабжено дополнительной рукоятью с гидроцилиндром привода, регулируемым гидродвигателем, гидроцилиндром управления, датчиками горизонтального и вертикального перемещения, причем шарнирно и соосно со штатной рукоятью установлена дополнительная рукоять с консольно-установленным на ее нижнем конце рабочим органом для отрывки трубопровода, выполненным в виде шнековой фрезы и проволочной щетки с приводами вращения, а гидроцилиндр привода дополнительной рукояти сообщен гидролиниями с четырехпозиционным гидрораспределителем, выполненным с возможностью сообщения, в одной из позиций золотника, со штоковой полостью гидроцилиндра управления, в поршневой полости которого установлен упругий элемент с механизмом регулирования силы упругости, а шток гидроцилиндра управления шарнирно соединен с органом управления регулируемого гидродвигателя привода ходового оборудования базовой машины, при этом датчики перемещения установлены на дополнительной стреле с возможностью односторонней связи с трубопроводом и контакты датчика вертикального перемещения соединены электролиниями с катушками электроуправляемого гидрораспределителя привода подъема стрелы и со светозвуковыми сигнализаторами, а контакты датчика бокового горизонтального перемещения соединены электролиниями со светозвуковыми сигнализаторами бокового смещения.
2. Рабочее оборудование одноковшового экскаватора по п. 1, отличающееся тем, что светозвуковые сигнализаторы установлены в кабине машиниста на пульте управления.
| РАБОЧЕЕ ОБОРУДОВАНИЕ ОДНОКОВШОВОГО ЭКСКАВАТОРА | 2013 |
|
RU2520307C1 |
| ЭКСКАВАТОР ДЛЯ ВСКРЫТИЯ ТРУБОПРОВОДОВ | 2019 |
|
RU2729632C1 |
| СПОСОБ ПРОИЗВОДСТВА ЗЕМЛЕРОЙНО-УКЛАДОЧНЫХ РАБОТ ПРИ ПРОКЛАДКЕ ПОДВОДНЫХ ТРУБОПРОВОДОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2507431C2 |
| ТРАНШЕЕКОПАТЕЛЬ | 2015 |
|
RU2592288C1 |
| УСТРОЙСТВО ДЛЯ ПОДКОПА ТРУБОПРОВОДОВ | 1998 |
|
RU2170307C2 |
| US 6280119 B1, 28.08.2001 | |||
| DE 4142082 A1, 03.09.1992 | |||
| Крыльчатое колесо для вентилятора | 1933 |
|
SU44871A1 |
