Изобретение относится к землеройной технике и может найти применение для производства земляных работ при вскрытии магистральных трубопроводов.
Известен экскаватор, содержащий базовую машину, рабочее оборудование с гидроприводом в виде гидронасоса, гидрораспределителя, гидроцилиндров и электрогидравлическую систему управления рабочим оборудованием (SU а.с. 338603, E02F 9/20). В известном экскаваторе используется одноковшовое рабочее оборудование, а это существенно снижает производительность, поскольку время непосредственного взаимодействия рабочего органа с разрабатываемым грунтом составляет около 30% от времени рабочего цикла. Остальное время затрачивается на повороты рабочего оборудования и разгрузку ковша. Кроме того, к уменьшению производительности ведет сложность управления рабочим процессом с использованием отдельных приводов стрелы, рукояти, ковша и поворота платформы. Применение моделирующего рычага и направляющего шаблона облегчает управление незначительно.
Известен экскаватор для вскрытия трубопроводов, содержащий базовую машину, рабочее оборудование с гидроприводом (RU патент 2029828, E02F 9/20, 9/22). Однако и второй известный экскаватор имеет аналогичные с первым недостатки, а именно, низкую производительность, вследствие использования одноковшового рабочего оборудования и сложности управления рабочим процессом. Учитывая отмеченные недостатки известных экскаваторов целесообразно, по мнению заявителя, для вскрытия трубопроводов использовать многоковшовые экскаваторы.
Известен и принят за прототип экскаватор, включающий базовую машину с регулируемым приводом ходового оборудования, рабочее оборудование с приводом подъема и вращения (SU а.с. 1564293, E02F 9/22). Известный экскаватор обеспечивает более высокую производительность, в сравнении с предыдущими, однако и он имеет недостатки. Один из которых заключается в том, что используется ручная система управления глубиной копания, а это в одном случае при превышении этой величины, приводит к повреждению трубопровода и рабочего оборудования. В другом случае, при малой величине глубины копания, остается толстый слой грунта над трубопроводом, для удаления которого необходимо выполнять дополнительные работы с большими затратами времени и средств, что снижает производительность. А кроме того усложняется управление рабочим процессом, утомляется машинист и снижается производительность. Другой недостаток заключается в больших затратах энергии на дросселирование рабочей жидкости при дроссельном способе регулирования мощного гидродвигателя привода ходового оборудования.
Предлагается экскаватор для вскрытия трубопроводов устраняющий отмеченные недостатки.
Экскаватор для вскрытия трубопроводов, включающий базовую машину с регулируемым приводом ходового оборудования, рабочее оборудование с приводом подъема и вращения, снабжен поворотной консолью с приводом подъема, скребком, щеткой с приводом вращения, копирным роликом, датчиками перемещения, гидроаккумуляторами, редукционными гидроклапанами, реле давления, управляемым гидродросселем, диодами и видеокамерой с монитором. К раме рабочего оборудования прикреплены шарнирно поворотная консоль и гидроцилиндр ее привода, а к нижнему концу консоли прикреплена через упругий элемент плита, с установленными на ней скребком и проволочной щеткой с приводом вращения, причем упругий элемент выполнен в виде упругой герметичной полости, заполненной рабочей жидкостью и сообщенной с первым гидроаккумулятором. К поворотной консоли шарнирно прикреплен коленчатый рычаг и на одном его конце установлен копирный ролик, а на другом шторка-замыкатель датчиков перемещения, установленных на поворотной консоли с возможностью регулирования между ними расстояния и соединенных электролиниями через диоды с катушками управления гидрораспределителя и управляемого гидродросселя, включенного в гидролинию слива. Полости опускания гидроцилиндров привода рабочего оборудования сообщены с реле давления, контакты которого соединены электролинией с катушкой гидрораспределителя, а на штоке одного из гидроцилиндров установлена шторка-замыкатель датчика перемещения, установленного на корпусе гидроцилиндра с возможностью перемещения и фиксации по линейке. На поворотной консоли закреплена видеокамера, соединенная кабелем с монитором в кабине машиниста. Гидродвигатель привода ходового оборудования выполнен регулируемым, с гидроцилиндром управления, сообщенным одной полостью с гидроцилиндром подъема рабочего оборудования, а другой полостью со вторым гидроаккумулятором. Гидроаккумуляторы сообщены через редукционные гидроклапаны с напорной гидролинией и через вентили с гидробаком.
Предлагаемый экскаватор для вскрытия трубопроводов отличается от прототипа совокупностью отличительных признаков, приведенных в отличительной части формулы изобретения.
Экскаватор имеет, в отличии от прототипа, автоматическую систему управления глубиной копания по отношению к вскрываемому трубопроводу. Это обеспечивается копирным роликом, перемещающимся по очищенной поверхности трубопровода и воздействующиму с помощью датчиков перемещения на гидрораспределитель управления подъемом рабочего оборудования. В результате упрощается управление рабочим процессом, повышается надежность и качество выполняемой работы, а также производительность. Кроме того применение объемного способа регулирования скорости гидродвигателя привода ходового оборудования, обеспечивает снижение затрат энергии.
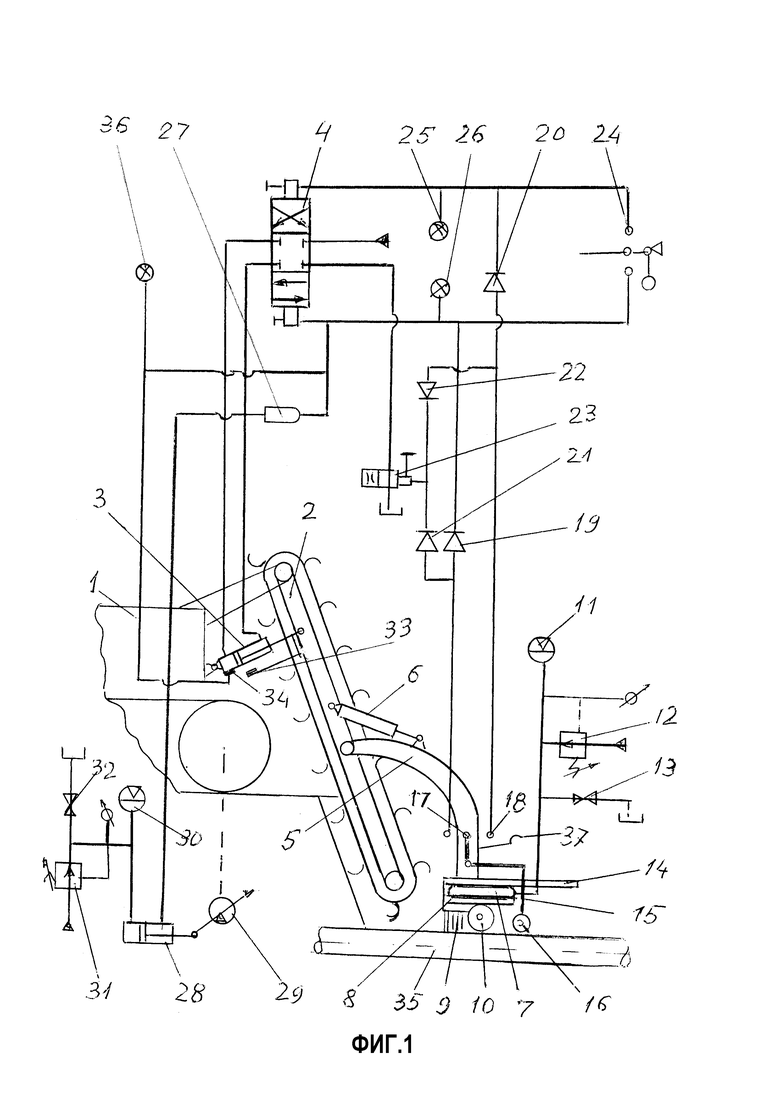
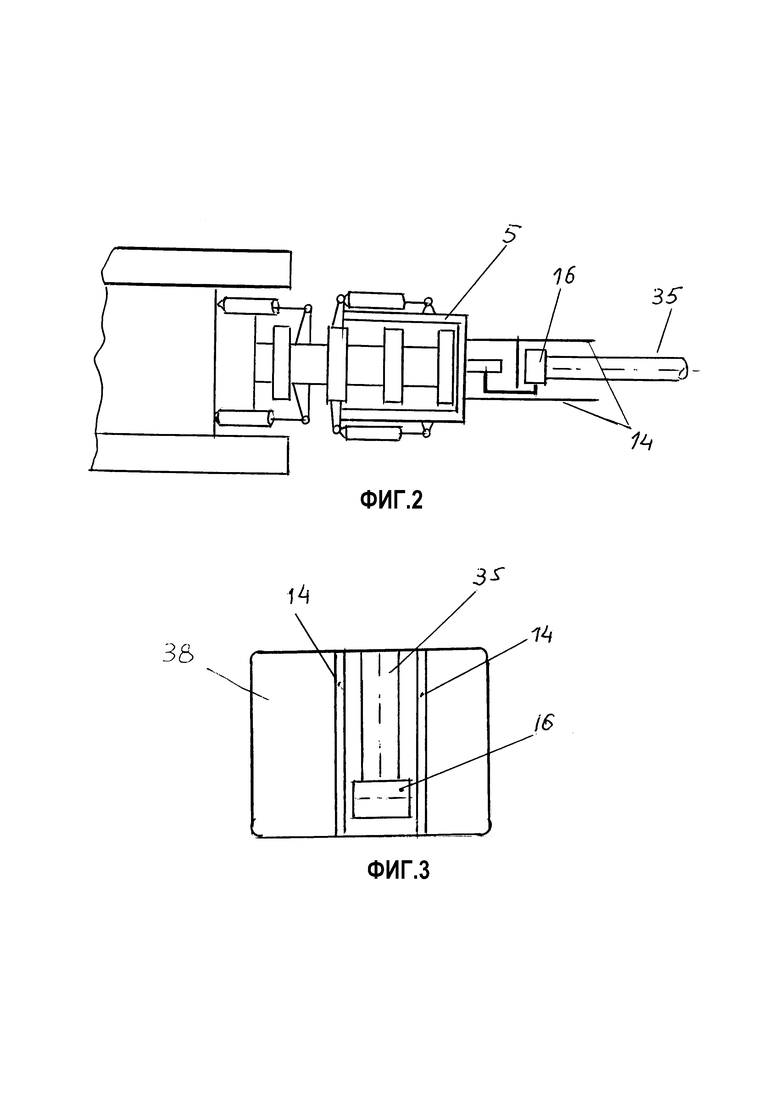
На фиг. 1 изображен экскаватор для вскрытия трубопроводов и электрогидравлическая схема; на фиг. 2 - то же вид сверху; на фиг. 3 экран монитора в кабине машиниста.
Экскаватор для вскрытия трубопроводов содержит базовую машину 1 с рабочим оборудованием в виде цепи с ковшами, расположенными на раме 2, а также гидроцилиндры 3 подъема рабочего оборудования, сообщенными с электроуправляемым гидрораспределителем 4. Шарнирно к раме 2 рабочего оборудования прикреплена поворотная консоль 5 и гидроцилиндры 6 ее привода. К нижнему концу консоли прикреплена через упругий элемент 7 плита 8, а на плите установлены скребок 9 и проволочная щетка 10 с приводом вращения. Упругий элемент 7 выполнен в виде гибкой упругой полости, заполненной рабочей жидкостью и сообщенной с гидроаккумулятором 11, который соединен через редукционный гидроклапан 12 с напорной гидролинией, и через вентиль 13 с гидробаком. На поворотной консоли 5 закреплены две параллельные указательные планки 14 неподвижно и шарнирно установлен коленчатый рычаг 15. На одном конце рычага, установлен копирный ролик 16 к на другом конце рычага закреплена шторка-замыкатель 17 датчиков перемещеня 18, расположенных на консоли 5 с возможностью изменения расстояния между ними. Контакты датчиков 18 соединены электролиниями через диоды 19 и 20 с катушками управления гидрораспределителя 4 и через диоды 21 и 22 с катушкой управляемого гидродросселя 23, включенного в сливную гидролинию. Катушки гидрораспределителя 4 соединены также электролиниями с пультом управления 24 и сигнальными светодиодными лампами 25 и 26. Кроме того, катушка управления подъемом рабочего оборудования соединена с контактами реле давления 27, присоединенного к штоковой полости гидроцилиндра 3, с которой сообщен гидроцилиндр 28 управления гидродвигателя 29 привода ходового оборудования. Поршневая полость гидроцилиндра 28 сообщена с гидроаккумулятором 30. Гидроаккумулятор сообщен с манометром и через редукционный гидроклапан 31, с напорной гидролинией, а через вентиль 32 с гидробаком. На штоке гидроцилиндра 3 подъема рабочего оборудования закреплена шторка-замыкатель 33 датчика перемещения 34, установленного на корпусе гидроцилиндра с возможностью перемещения и фиксации по линейке со шкалой, проградуированной в единицах глубины нижней режущей кромки ковшей относительно опорной поверхности над трубой 35. Датчик 34 соединен электролинией с катушкой гидрораспределителя 4 и с сигнальной светодиодной лампой 36. На поворотной консоли 5 закреплена видеокамера 37, передающая изображение трубы 35, копирного ролика 16 и указательных планок 14 на монитор 38 в кабине машиниста.
Экскаватор для вскрытия трубопроводов действует следующим образом.
Для подготовки к работе экскаватор устанавливают в направлении трассы над трубопроводом. С наличием информации о глубине залегания трубопровода датчик перемещения 34 на корпусе гидроцилиндра 3 устанавливают по линейке на известную глубину, если таковая информация отсутствует, то глубину определяют на месте. Затем включается привод вращения рабочего органа и он заглубляется на установленную глубину, при достижении которой загорается сигнальная лампа 36. Затем включается привод ходового оборудования и производится отрывка участка траншеи над трубопроводом небольшой длины, достаточной для установки на предварительно очищенный трубопровод плиты 8 со скребком 9, щеткой 10 и копирного ролика 16. После установки ролика 16 на поверхность трубы устанавливают в исходное положение рабочее оборудование с помощью пульта управления 24, гидрораспределителя 4 и гидроцилиндров 3. Исходное положение рабочего оборудования будет установлено, если при этом шторка-замыкатель 17 находится между датчиками перемещения 18 и сигнальные светодиодные лампы 25 и 26 не горят. Положение подъемной консоли 5 зафиксировано гидроцилиндрами 6, а положение рабочего оборудования гидроцилиндрами 3. Выполнив указанные подготовительные операции, приступают к выполнению основной операции - отрывки трубопровода по его длине. Для этого включают приводы вращения рабочего оборудования, щетки 10 и привод 29 ходового оборудования. Экскаватор медленно перемещается вперед, ковши срезают грунт и образуют траншею над трубопроводом, скребок 9 разрыхляет остатки грунта, а вращающаяся проволочная щетка 10 окончательно очищает поверхность трубы, по которой перемещается копирный ролик 16. Величина усилия прижатия скребка 9 и проволочной щетки 10 к трубе задается величиной давления рабочей жидкости в упругом элементе 7 и в гидроаккумуляторе 11, которое устанавливается с помощью редукционного гидроклапана 12, вентиля 13 и манометра. Такое состояние элементов экскаватора сохраняется при неизменной глубине залегания трубопровода. Рассмотрим явления, возникающие при неизбежном изменении этой глубины.
Пусть, например, на каком то участке трассы, вследствие изменения рельефа поверхности, увеличилось расстояние от трубы до опорной поверхности. В этом случае базовая машина 1, рабочее оборудование и консоль 5 получают некоторое перемещение вверх, относительно трубы 35. Копирный ролик 16 под действием собственной силы тяжести остается на трубе, а коленчатый рычаг 15 поворачивается относительно шарнира на консоли 5 и шторка-замыкатель 17 на его верхнем конце, перемещаясь, включает правый датчик перемещения 18. Сигнал от этого датчика поступает через диод 22 на катушку управляемого гидродросселя 23, включая его, и через диод 20 на катушку гидрораспределителя 4 и сигнальную лампу 25. В результате гидрораспределитель 4 включает гидроцилиндры 3 на опускание рабочего оборудования, причем опускание происходит небольшое, благодаря включенному в сливную гидролинию, управляемому гидродросселю 23. Опускание рабочего оборудования автоматически прекращается, когда рабочее оборудование займет исходное положение и коленчатый рычаг 15, повернувшись относительно шарнира, отведет шторку-замыкатель 17 от правого датчика перемещения 18. Тогда золотник гидрораспределителя 4 возвращается в нейтральную позицию и гидродроссель 23 пружиной устанавливается в исходное положение, а сигнальная лампа 25 гаснет.
Если же, на другом участке пути расстояние от трубы до опорной поверхности уменьшается, то при перемещении вниз консоли 5 коленчатый рычаг 15, поворачиваясь относительно шарнира, включит шторкой-замыкателем 17 левый датчик перемещения 18. Сигнал от левого датчика поступает через диод 21 на катушку управляемого гидродросселя 23 и через диод 19 на катушку гидрораспределителя 4 и сигнальную лампу 26. В результате гидрораспределитель 4 включает гидроцилиндры 3 на подъем рабочего оборудования до момента установки его в заданное исходное положение, когда левый датчик 18 выключает гидрораспределитель 4, гидродроссель 23 и сигнальную лампу 26. Все эти включения и выключения производятся автоматически без остановки движения базовой машины и рабочего оборудования. В случае необходимости можно осуществлять и ручное управление подъемом и опусканием рабочего оборудования, используя пульт 24. Диоды 19 и 20 блокируют возможность включения гидродросселя 23, обеспечивая рабочую скорость подъема и опускания рабочего оборудования.
Скорость движения базовой машины автоматически регулируется в зависимости от величины усилия воздействия грунта на рабочее оборудование. При увеличении этого усилия повышается давление рабочей жидкости в штоковых полостях гидроцилиндров 3 и в сообщенной с ними штоковой полости гидроцилиндра управления 28. Под действием этого давления шток, преодолевая заданное давление в гидроаккумуляторе 30, воздействует на орган управления регулируемого гидродвигателя 29 привода ходового оборудования, уменьшая скорость. Величина давления в гидроаккумуляторе 30 задается в соответствии со свойствами разрабатываемого грунта, посредством редукционного гидроклапана 31, вентиля 32 и манометра.
При встрече с непреодолимым препятствием и чрезмерным увеличением давления рабочей жидкости в штоковых полостях гидроцилиндров 3, реле давления 27 включает гидрораспределитель 4 на выглубление рабочего оборудования. Видеокамера 37, закрепленная на консоли 5, передает на монитор 38 в кабине машиниста изображение трубы и двух указательных параллельных планок 14, что облегчает машинисту управление движением машины по курсу. По картине на экране труба должна находиться между планками 14.
Таким образом, использование предложенного экскаватора для вскрытия трубопроводов, обеспечивает повышение производительности за счет безостановочной работы и автоматического регулирования положения рабочего оборудования относительно вскрываемого трубопровода. Одновременно снижаются затраты энергии за счет исключения дросселирования рабочей жидкости при объемном способе регулирования скорости ходового оборудования. Из описания устройства и действия предложенного экскаватора видно, что автоматизированы основные операции управления рабочим процессом, кроме управления движением по курсу, но и она существенно облегчается благодаря наглядной картине на экране монитора с изображением трубы и указательных планок.
Полезно заметить, что предложенное изобретение может быть использовано, как при разработке новых специализированных экскаваторов для вскрытия магистральных трубопроводов, так и в виде дополнительного рабочего оборудования, на выпускаемые многоковшовые экскаваторы, для расширения функциональных возможностей без существенных изменений конструкции.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидропривод стрелы погрузчика | 2021 |
|
RU2769209C1 |
| СКРЕПЕР С ГАЗОВОЙ СМАЗКОЙ КОВША | 2020 |
|
RU2760655C1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ДОРОЖНОЙ МАШИНЫ | 2019 |
|
RU2729534C1 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР | 2018 |
|
RU2709270C1 |
| СКРЕПЕР | 2020 |
|
RU2760656C1 |
| Система управления догружающего устройства скрепера | 2021 |
|
RU2761274C1 |
| ГИДРОПРИВОД ЗЕМЛЕРОЙНОЙ МАШИНЫ НЕПРЕРЫВНОГО ДЕЙСТВИЯ | 2019 |
|
RU2719295C1 |
| Рабочее оборудование одноковшового экскаватора | 2023 |
|
RU2808751C1 |
| Система управления углом резания рыхлителя | 2023 |
|
RU2828248C1 |
| СИСТЕМА УПРАВЛЕНИЯ ОДНОКОВШОВОГО ПОГРУЗЧИКА | 2019 |
|
RU2729537C1 |
Изобретение относится к землеройной технике, используемой для вскрытия магистральных трубопроводов. Техническим результатом является повышение производительности и снижение затрат энергии экскаватора. К штатному рабочему оборудованию многоковшового экскаватора добавлена поворотная консоль 5 с гидроцилиндрами привода 6 и в нижней ее части, через упругий элемент 7, установлены скребок 9 и проволочная щетка 10 с приводом вращения. К консоли 5 шарнирно прикреплен коленчатый рычаг 15, на нижнем конце которого установлен ролик 16, а на верхнем - замыкатель 17 датчиков перемещения 18, расположенных на консоли. При непрерывном перемещении экскаватора обеспечивается автоматическое управление высотой режущих кромок ковшей относительно трубопровода, независимо от меняющегося рельефа поверхности. Одновременно автоматически регулируется скорость движения экскаватора, в зависимости от величины нагрузки на рабочее оборудование. Машинисту остается операция корректировки движения экскаватора по курсу, но и она существенно облегчается путем установки на консоли видеокамеры и монитора в кабине. Изображение на экране трубопровода и указательных боковых планок дают полную информацию о взаимном положении рабочего органа и трубопровода, что упрощает управление рабочим процессом. 2 з.п. ф-лы, 3 ил.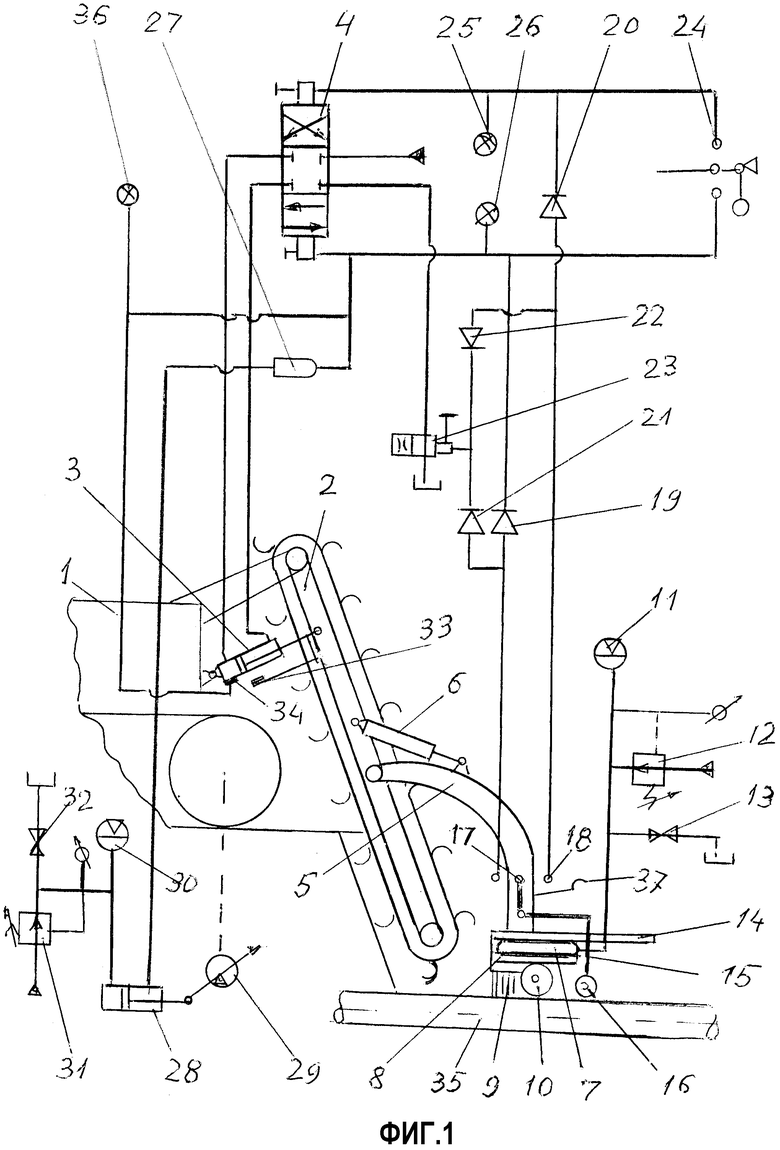
1. Экскаватор для вскрытия трубопроводов, включающий базовую машину с регулируемым приводом ходового оборудования, рабочее оборудование с приводами подъема и вращения, отличающийся тем, что он снабжен поворотной консолью с приводом подъема, скребком, щеткой с приводом вращения, копирным роликом, датчиками перемещения, гидроаккумуляторами, редукционными гидроклапанами, реле давления, управляемым гидродросселем, диодами и видеокамерой с монитором, при этом к раме рабочего оборудования прикреплены шарнирно поворотная консоль и гидроцилиндры ее привода, а к нижнему концу консоли прикреплена через упругий элемент плита с установленными на ней скребком и с проволочной щеткой с приводом вращения, причем упругий элемент выполнен в виде упругой герметичной полости, заполненной рабочей жидкостью и сообщенной с первым гидроаккумулятором, при этом к поворотной консоли шарнирно прикреплен коленчатый рычаг и на одном его конце установлен копирный ролик, а на другом - шторка-замыкатель датчиков перемещения, установленных на поворотной консоли с возможностью регулирования между ними расстояния и соединенных электролиниями через диоды с катушками управления гидрораспределителя и управляемого гидродросселя, включенного в сливную гидролинию, а полости опускания гидроцилиндров привода рабочего оборудования сообщены с реле давления, контакты которого соединены электролинией с катушкой гидрораспределителя и на штоке одного из гидроцилиндров закреплена шторка-замыкатель датчика перемещения, установленного на корпусе гидроцилиндра с возможностью перемещения и фиксации на линейке, причем на поворотной консоли размещена видеокамера, соединенная кабелем с монитором в кабине машиниста, при этом гидродвигатель привода ходового оборудования выполнен регулируемым, с гидроцилиндром управления, соединенным одной полостью с гидроцилиндром подъема рабочего оборудования, а другой полостью со вторым гидроаккумулятором.
2. Экскаватор для вскрытия трубопроводов по п. 1, отличающийся тем, что гидроаккумуляторы сообщены через редукционные гидроклапаны с напорной гидролинией и через вентили с гидробаком.
3. Экскаватор для вскрытия трубопроводов по п. 1, отличающийся тем, что линейка с датчиком перемещения на корпусе гидроцилиндра подъема рабочего оборудования выполнена со шкалой, проградуированной в единицах глубины режущих кромок ковшей относительно опорной поверхности.
| Гидропривод землеройной машины непрерывного действия | 1988 |
|
SU1564293A1 |
| Траншейный экскаватор для вскрытия подземных трубопроводов | 1984 |
|
SU1198166A1 |
| Система автоматизированного управления процессом рытья одноковшовыми экскаваторами траншей для укладки трубопроводов и инженерных коммуникаций преимущественно с негоризонтальным дном и на участках со склонами | 2017 |
|
RU2683451C2 |
| ЭКСКАВАТОР ДЛЯ ВСКРЫТИЯ ТРУБОПРОВОДОВ | 1990 |
|
RU2029828C1 |
| Устройство для управления рабочим оборудованием гидравлического одноковшового экскаватора | 1978 |
|
SU903491A1 |
| DE 102011106463 A1, 15.12.2011 | |||
| US 6735888 B2, 18.05.2004 | |||
| JP 2004143855 A, 20.05.2004. | |||

