Группа изобретений относится к стоматологии и может быть использована для обучения и совершенствования навыков студентов при различных стоматологических вмешательствах.
Известно устройство для обучения навыкам препарирования зубов, представляющее собой smart-челюсть, содержащую проводящую подложку с измерительными и функциональными датчиками и установленными в проводящей подложке съемными smart-зубами с внутренними сигнальными прослойками для контакта со стоматологическим инструментом (О.О. Янушевич и др. Стоматологический антропоморфный робот. Новая эра в имитации врачебных манипуляций и клинического приема // Cathedra. Стоматологическое образование, 2021, № 78, с. 64-67).
Сложность конструкции, объединяющей smart-зубы и smart-челюсть относится к недостаткам известного технического решения.
Более близкими аналогами изобретений, составляющих группу, можно считать Smart-челюсть для стоматологического антропоморфного робота, известную из описания изобретения к патенту RU 2814393 С1, 28.02.2024 и Smart-зуб для стоматологического антропоморфного робота, который известен из описания изобретения к патенту RU 2813332 С1, 12.02.2024.
Известные устройства могут использоваться друг с другом, но не полная имитация реального стоматологического вмешательства относится к их недостаткам.
Изобретение направлено на решение технической проблемы, заключающейся в создании smart-челюсти и smart-зуба, не имеющих недостатков известных конструкций.
Техническим результатом группы изобретений является повышение эффективности обучения путем расширения имитационного функционала искусственной smart-челюсти, содержащей съемные smart-зубы.
Сущность группы изобретений выражается в совокупности существенных признаков, в которой smart-челюсть для стоматологического антропоморфного робота, содержащая основание с измерительными и функциональными датчиками, крепежными выемками и с установленными на основании съемными smart-зубами с коронками, корневыми частями и сигнальными средствами контакта smart-зуба со стоматологическим инструментом, отличается от ближайшего агалога тем, что съемные smart-зубы содержат упругие установочные стаканы с отверстиями для фиксации к smart-челюсти и корневые части, которые расширяются от коронок и расположены в сужающихся к коронкам полостях упругих установочных стаканов, выполненных для извлечения расширяющихся корневых частей из сужающихся к коронкам полостей, при этом основание выполнено в виде двух пластин, соединенных крепежными пружинами и шаровой опорой, выполненной с возможностью установки в крепежной площадке верхней пластины, снабженной постоянными неодимовыми магнитами, размещенными напротив аналоговых датчиков Холла SS49E, расположенных на нижней пластине для определения расстояния между пластинами, причем нижняя пластина, выполнена с, как минимум, одной контактной площадкой из материала константан для определения температуры smart-зуба путем формирование термопары J-типа с ответной стальной площадкой в smart-зубе и снабжена разъемом для подключения контроллера, а сигнальные средства контакта smart-зуба со стоматологическим инструментом выполнены в виде сигнальных контактных площадок, соединенных с микросхемой.
Сменный smart-зуб для smart-челюсти содержит установочный стакан с отверстием для фиксации к smart-челюсти, коронку и расширяющуюся от коронки корневую часть, которая расположена в сужающейся к коронке полости установочного стакана, выполненного из упругого материала для извлечения расширяющейся корневой части из сужающейся к коронке полости.
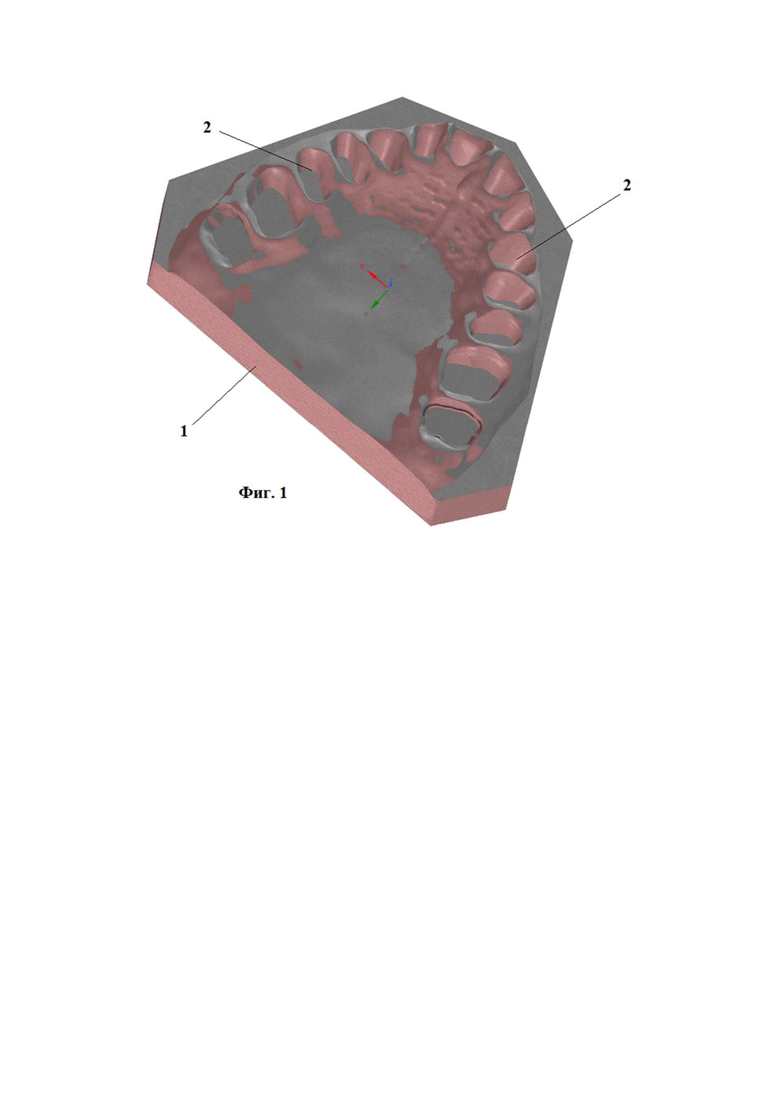
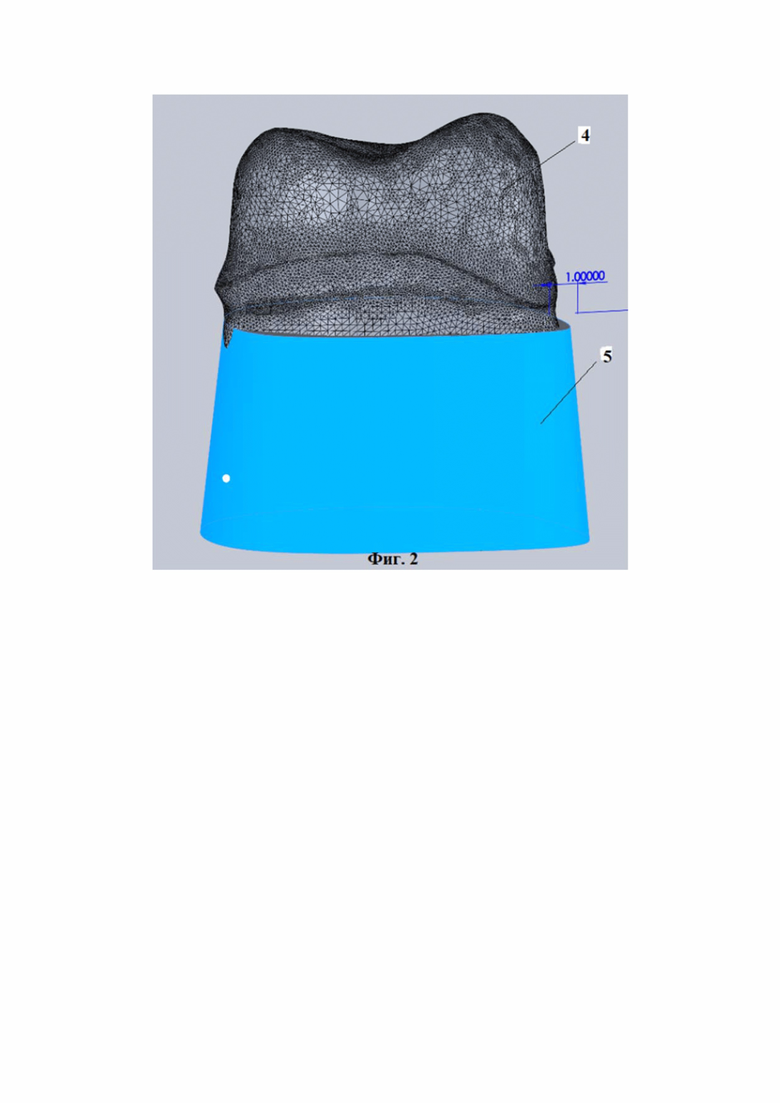
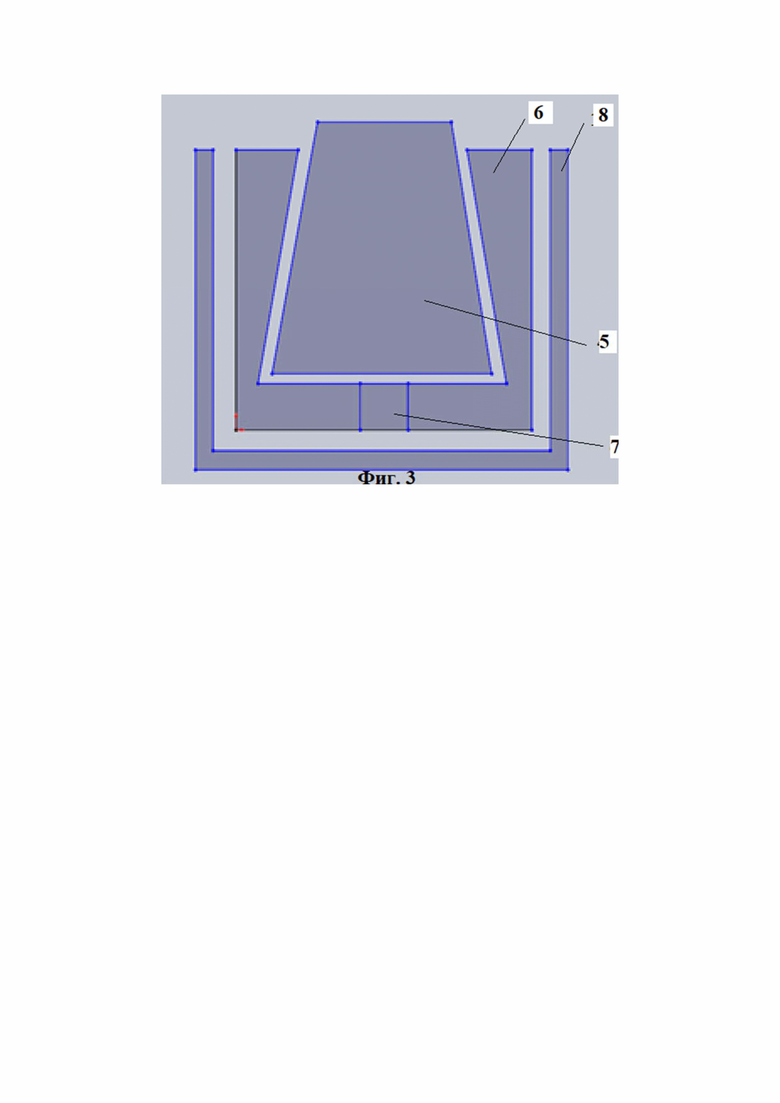
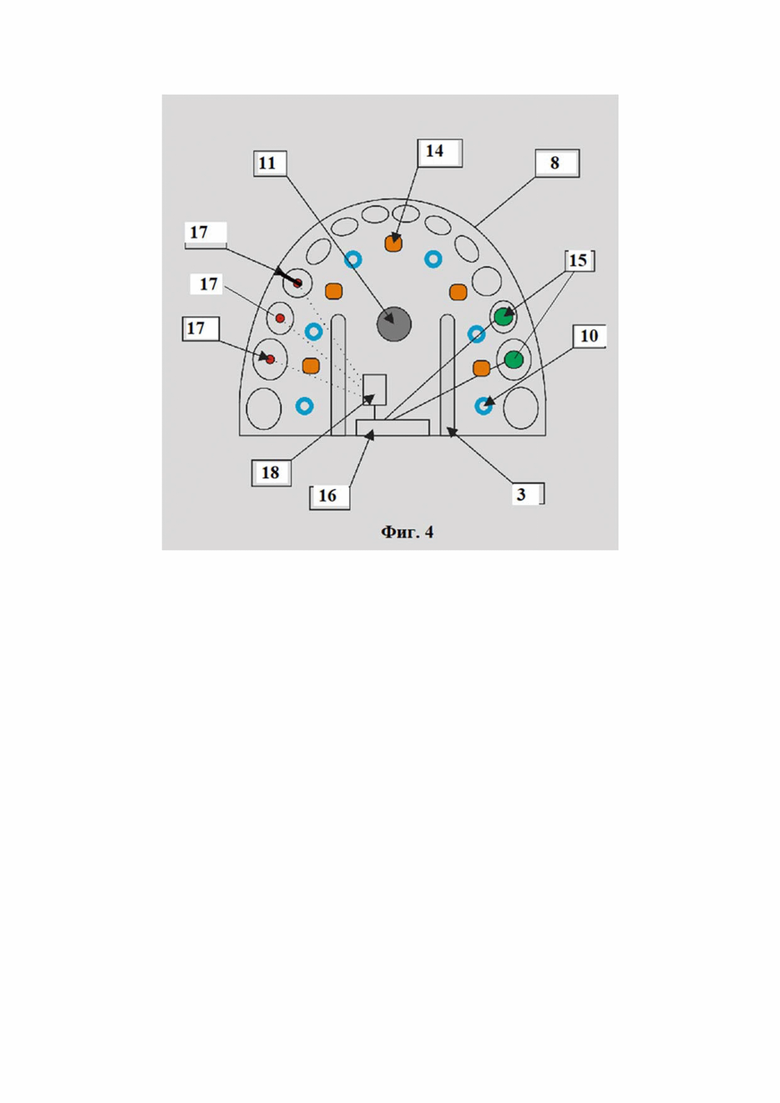
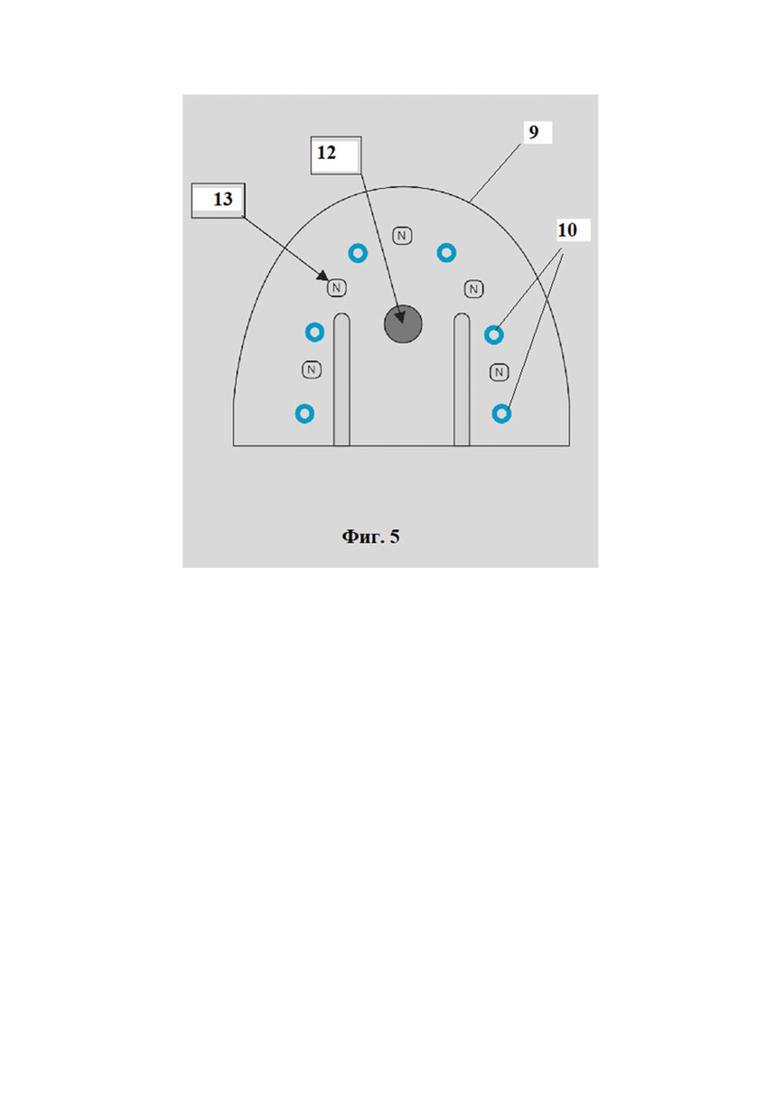
Сущность группы изобретений поясняется чертежом, где на фиг. 1 дан общий вид smart-челюсти, на фиг. 2 - структура smart-зуба, на фиг. 3 - схема крепления отдельного smart-зуба в основании smart-челюсти и на фиг. 4 и 5 - нижняя и верхняя пластины, образующие основание smart-челюсти.
Smart-челюсть представляет собой полимерное или металлическое основание 1 с формой, приближенной к натуральной. В месте расположения smart-зубов в основании 1 выполнены выемки 2, предназначенные для крепления съемных smart-зубов и установочные выемки 3, предназначенные для крепления Smart-челюсти, например, на стоматологическом антропоморфном роботе. Smart-челюсть снабжена измерительными датчиками, функциональными датчиками и установленными на основании 1 съемными smart-зубами. Smart-зубы содержат коронки 4, корневые части 5, сигнальные средства контакта со стоматологическим инструментом и установочные стаканы 6 с отверстиями 7 для фиксации к smart-челюсти. Корневые части 5 smart-зубов расширяются от коронок 4 и расположены в сужающихся к коронкам 4 полостях установочных стаканов 6. Стаканы 6 выполнены из упругого материала для извлечения расширяющихся корневых частей 5 из сужающихся к коронкам 4 полостей. Основание 1 выполнено в виде двух пластин 8 и 9. Пластины 8 и 9 основания 1 соединены крепежными пружинами 10 и шаровой опорой 11. Шаровая опора 11 выполнена с возможностью установки в крепежной площадке 12 верхней пластины 9, снабженной постоянными неодимовыми магнитами 13. Магниты 13 размещены напротив аналоговых датчиков 14 (датчиков Холла SS49E), расположенных на нижней пластине 8 для определения расстояния между пластинами 8 и 9. Нижняя пластина 8 выполнена с, как минимум, одной контактной площадкой 15 из материала константан для определения температуры smart-зуба путем формирование термопары J-типа с ответной стальной площадкой в smart-зубе и снабжена разъемом 16 для подключения контроллера. Сигнальные средства контакта smart-зуба со стоматологическим инструментом выполнены в виде сигнальных контактных площадок 17, соединенных с микросхемой 18.
Использование, как минимум, одной контактной площадки 15 из различных материалов (константан и железо/сталь) позволяет сформировать термопару J-типа в месте крепления smart-зуба к smart-челюсти, что в свою очередь позволяет обеспечить измерение температуры smart-зуба в реальном времени.
Наличие крепежных пружин 10 между нижней 8 и верхней 9 половинами smart-челюсти позволяет изменять расстояние от датчиков 14 (датчиков Холла) до магнитов 13 в точках их нахождения в зависимости от величины давления на соответствующий сегмент smart-челюсти. Обработка полученных данных о расстоянии в указанных точках позволяет получить данные о величине давления.
Наличие датчиков касания позволяет обеспечить отслеживание факта касания проводящими медицинскими инструментами (в том числе, пневматическими, в которых электрический контакт обеспечивается через подшипники инструмента) проводящего материала, располагаемого в требуемых местах smart-зуба. Частным случаем может являться отслеживание факта успешного попадания инструментом в требуемые участки зубной ткани.
Коронка 4 (внешняя часть) smart-зуба, выполненная из полимерного материала. Выполняется аддитивным методом (один из возможных вариантов - 3D-печатью из порошковых полимерных материалов или фотоотверждаемого полимера).
Корневая часть 5 smart-зуба, обеспечивающая его удержание в состоянии без нагрузки, а также сопротивление усилиям, оказываемым в осевом направлении. При необходимости детектирования соприкосновения стоматологического инструмента с поверхностью корневой (фиксирующей) части 5 smart-зуба может покрываться проводящим покрытием, обеспечивающим электрический контакт стоматологического инструмента и сенсоров smart-челюсти.
Форма корневой (фиксирующей) части 5 smart-зуба выбирается таким образом, чтобы обеспечить механическое сопротивление основному извлекающему усилию в осевом направлении. Один из вариантов такой формы - «ласточкин хвост» показан на Фиг. 3. При выборе такой формы величина сопротивления напрямую зависит от угла расклинивания. Таким образом может быть обеспечена оптимизация/регулировка усилия, необходимого для извлечения зуба.
Клеящий состав (один из возможных вариантов - клеевые составы на основе натуральных и синтетических каучуков), наносимый, при необходимости на поверхность корневой (фиксирующей) части 5 smart-зуба, предназначен для создания дополнительного сопротивления усилию, динамически уменьшающегося в процессе многократной деформации клеевого соединения и выполнения обучаемым характерных действий, направленных на «расшатывание» smart-зуба.
| название | год | авторы | номер документа |
|---|---|---|---|
| Smart-зуб для стоматологического антропоморфного робота | 2024 |
|
RU2838628C1 |
| Smart-челюсть для стоматологического антропоморфного робота | 2022 |
|
RU2814393C1 |
| Smart-зуб для стоматологического антропоморфного робота | 2022 |
|
RU2813332C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТОЛЩИНЫ ПРИКРЕПЛЕННОЙ ДЕСНЫ | 2020 |
|
RU2734746C1 |
| СПОСОБ ОРТОДОНТИЧЕСКОГО ЛЕЧЕНИЯ ПАЦИЕНТОВ С ДЕФЕКТАМИ ТВЕРДЫХ ТКАНЕЙ ЗУБОВ | 2017 |
|
RU2645641C1 |
| Способ измерения угла конвергенции боковых поверхностей препарированных зубов к режущему краю или жевательной поверхности | 2015 |
|
RU2613433C1 |
| Дентомодель для обучения технике лечения циркулярного кариеса и гигиены полости рта | 2020 |
|
RU2738043C1 |
| Способ лечения острой травмы верхних резцов у детей с дистальной окклюзией и протрузией верхних резцов | 2022 |
|
RU2802784C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ЗУБА С ПОМОЩЬЮ РАЗБОРНОЙ ИСКУССТВЕННОЙ КОРОНКИ | 2023 |
|
RU2816225C1 |
| Способ оценки электровозбудимости корневой пульпы постоянных многоканальных зубов после пульпотомии | 2019 |
|
RU2722567C1 |
Группа изобретений относится к медицинской технике, а именно к smart-челюсти для стоматологического антропоморфного робота и сменному smart-зубу для smart-челюсти. На основании smart-челюсти установлены съемные smart-зубы, которые содержат упругие установочные стаканы с отверстиями для фиксации к smart-челюсти. Корневые части smart-зубов расширяются от коронок и расположены в сужающихся к коронкам полостях упругих установочных стаканов. Основание выполнено в виде двух пластин, соединенных крепежными пружинами и шаровой опорой. Шаровая опора выполнена с возможностью установки в крепежной площадке верхней пластины. Верхняя пластина снабжена постоянными неодимовыми магнитами, размещенными напротив аналоговых датчиков Холла, расположенных на нижней пластине для определения расстояния между пластинами. Нижняя пластина выполнена с контактной площадкой из константана для определения температуры smart-зуба путем формирования термопары J-типа с ответной стальной площадкой в smart-зубе и снабжена разъемом для подключения контроллера. Достигается повышение эффективности обучения путем расширения имитационного функционала искусственной smart-челюсти, содержащей съемные smart-зубы. 2 н.п. ф-лы, 5 ил.
1. Smart-челюсть для стоматологического антропоморфного робота, содержащая основание с измерительными и функциональными датчиками, крепежными выемками и с установленными на основании съемными smart-зубами с коронками, корневыми частями и сигнальными средствами контакта smart-зуба со стоматологическим инструментом, отличающаяся тем, что съемные smart-зубы содержат упругие установочные стаканы с отверстиями для фиксации к smart-челюсти и корневые части, которые расширяются от коронок и расположены в сужающихся к коронкам полостях упругих установочных стаканов, выполненных для извлечения расширяющихся корневых частей из сужающихся к коронкам полостей, при этом основание выполнено в виде двух пластин, соединенных крепежными пружинами и шаровой опорой, выполненной с возможностью установки в крепежной площадке верхней пластины, снабженной постоянными неодимовыми магнитами, размещенными напротив аналоговых датчиков Холла SS49E, расположенных на нижней пластине для определения расстояния между пластинами, причем нижняя пластина выполнена с как минимум одной контактной площадкой из материала константан для определения температуры smart-зуба путем формирования термопары J-типа с ответной стальной площадкой в smart-зубе и снабжена разъемом для подключения контроллера, а сигнальные средства контакта smart-зуба со стоматологическим инструментом выполнены в виде сигнальных контактных площадок, соединенных с микросхемой.
2. Сменный smart-зуб для smart-челюсти по п.1, содержащий установочный стакан с отверстием для фиксации к smart-челюсти, коронку и расширяющуюся от коронки корневую часть, которая расположена в сужающейся к коронке полости установочного стакана, выполненного из упругого материала для извлечения расширяющейся корневой части из сужающейся к коронке полости.
| Smart-челюсть для стоматологического антропоморфного робота | 2022 |
|
RU2814393C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕРАПЕВТИЧЕСКОГО ПОЛОЖЕНИЯ НИЖНЕЙ ЧЕЛЮСТИ ПРИ ПОВЫШЕННОЙ СТИРАЕМОСТИ ЗУБОВ | 2020 |
|
RU2737584C1 |
| JP 5363181 B2, 11.12.2013 | |||
| JP 2017009838 A, 12.01.2017 | |||
| US 2011136090 A1, 09.06.2011 | |||
| WO 2012156287 A1, 22.11.2012 | |||
| DE 10217691 C1, 18.06.2003. | |||

