Изобретение относится к стоматологии и может быть использовано для обучения и совершенствования навыков студентов при различных стоматологических вмешательствах.
Известно устройство для обучения навыкам препарирования зубов, содержащее инструмент для препарирования, соединенный с блоком датчиков давления и блоки отображения учебной информации, устойчивости рук, сравнения, определитель теплонапряженности и регистратор касания (SU 1478244 А1, 07.05.2089).
Недостатком известного устройства является его конструкция, обеспечивающая получение учебной информации, характеризующей работу инструмента, но не имеющей отношения к муляжу или искусственному зубу, с которым инструмент взаимодействует.
Известно средство для практики стоматологического лечения, включающее инструменты и модели челюстей, соединенные со средствами лечения и аудиовизуального контроля (US 2011/0136090 А1, 09.06.2011).
Средство, известное из US 2011/0136090 позволяет получать учебную информацию не только о работе инструмента, но и об объекте, на который этот инструмент воздействует, однако аудиовизуальный контроль за стоматологическим инструментом и искусственной челюстью не может считаться достаточным.
Более близким аналогом изобретения (прототипом) является smart-челюсть, содержащая проводящую подложку с измерительными и функциональными датчиками и установленные в проводящей подложке съемные smart-зубы с внутренними сигнальными прослойками для контакта со стоматологическим инструментом (О.О. Янушевич и др. Стоматологический антропоморфный робот. Новая эра в имитации врачебных манипуляций и клинического приема // Cathedra. Стоматологическое образование, 2021, №78, с. 64-67).
Недостатком прототипа является сложность конструкции, которая существенно ограничивает его использование на практике.
Изобретение направлено на решение технической проблемы, заключающейся в создании конструкции smart-челюсти, не имеющей недостатков известных устройств.
Техническим результатом изобретения является повышение эффективности обучения путем расширения имитационного функционала искусственной челюсти, содержащего съемные искусственные зубы.
Сущность изобретения выражается в совокупности существенных признаков, в которой smart-челюсть, содержащая проводящую подложку с измерительными и функциональными датчиками и установленные в проводящей подложке съемные искусственные зубы с внутренними сигнальными прослойками для контакта со стоматологическим инструментом, отличается от ближайшего аналога тем, что съемные искусственные зубы содержат установочные подложки для соединения со средствами электронного управления и контактные площадки с фигурными рабочими поверхностями, размещенными в ответных выемках, выполненных в установочных подложках, при этом внутренние сигнальные прослойки выполнены в виде токопроводящего геля, размещенного в корневых каналах и в пульпарных полостях, объем каждой из которых, как минимум, на 1/4 превышают суммарный объем полостей корневых каналов в одном искусственном зубе, а фигурные рабочие поверхности контактных площадок выполнены для электрического соединения токопроводящего геля с установочными подложками и соединены с нижней частью корневых каналов.
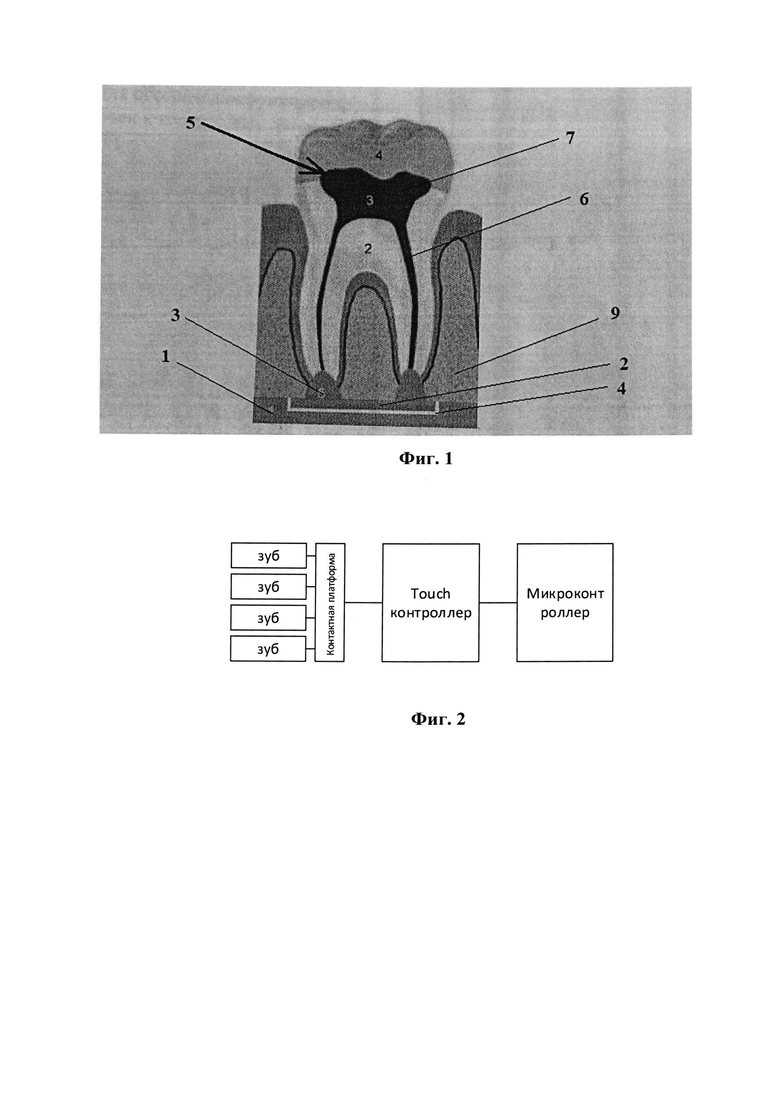
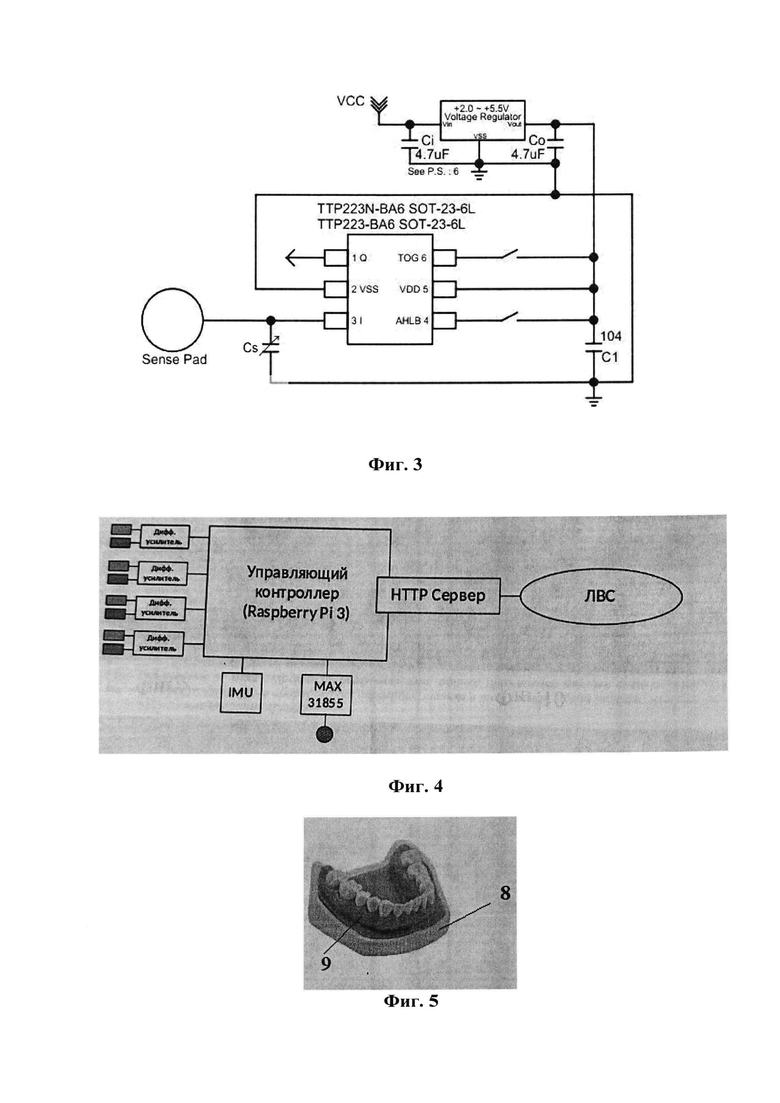
В частных случаях своего выполнения или использования smart-челюсть содержит, по меньшей мере, один датчик, выполненный в виде регистратора внешнего давления, по меньшей мере, один, датчик, выполненный в виде регистратора температурного воздействия и, по меньшей мере, один датчик, выполненный в виде измерителя глубины введения инструмента в искусственный зуб. Измерительные и функциональные датчики могут быть выполнены со световой сигнализацией и со звуковой сигнализацией. В частных случаях своего выполнения или использования smart-челюсть также содержит жесткое полимерное основание и искусственную десну в виде мягкой накладки. Сущность изобретения поясняется чертежами, где на фиг. 1 - изображены основные элементы съемного smart-зуба, установленного в проводящей подложке smart-челюсти, на фиг. 2 - схема подключения съемного smart-зуба и на фиг. 3 - схема Touch-контроллера на базе ИС ТТР23, используемого в схеме подключения съемного smart-зуба, на фиг. 4 - общая блок-схема smart-челюсти, на фиг. 5 - общий вид smart-челюсти и на фиг. 6 - 32 - пример выполнения задания по препарированию зуба.
Smart-челюсть содержит проводящую подложку 1 с измерительными и функциональными датчиками и установленные в проводящей подложке 1 съемные smart-зубов с внутренними сигнальными прослойками 5 для контакта со стоматологическим инструментом. Каждый smart-зуба, содержит контактную площадку 2 с фигурной рабочей поверхностью 3. Контактная площадка 2 размещена в ответной выемке 4, выполненной в установочной подложке 1. Внутренняя сигнальная прослойка 5, представляет собой токопроводящий гель, размещенный в корневых каналах бив пульпарной полости 7. Объем каждой пульпарной полости 7, как минимум, на 1/4 превышают суммарный объем полостей корневых каналов в одном имитаторе зуба. Фигурная рабочая поверхность 3 контактной площадки 2 выполнена для электрического соединения токопроводящего геля (сигнальной прослойки 5) с установочной подложкой 1 и соединена с нижней частью корневых каналов 6.
Верхнюю часть каждого имитатора зуба - коронку, включающую пульпарную полость 7, выполняют заданной формы аддитивным либо традиционным методом из фотоотверждаемого полимера.
Нижнюю часть smart-зуба, включающую корневые каналы 6 заданной формы и полость 7 под сигнальную прослойку 5 выполняют аддитивным методом из фотоотверждаемого полимера, например, 3D-печатью на DLP или SLA 3D принтере.
В качестве токопроводящего геля может быть использован универсальный электродный гель для ЭКГ, в состав которого входят вода, карбомер, глицерин, пропиленгликоль и хлорид калия.
Smart-челюсть может содержать жесткое полимерное основание 8 и искусственную десну в виде мягкой накладки 9.
После заполнения в каждом smart-зубе токопроводящим гелем корневых каналов 6 и пульпарной полости 7 фигурную рабочую поверхность 3 контактной площадки 2 соединяют с нижней частью корневых каналов 6. Контактную площадку 2 фиксируют в установочной подложке 1. Установочную подложку 1, в свою очередь, фиксируют в smart-челюсти. Закрепление установочной подложки 1 в smart-челюсти может осуществляться разъемным соединением для последующей замены smart-зубов и многократного использования smart-челюсти.
Smart-зубы, установленные в smart-челюсть, за счет электрического контакта, обеспечиваемого общей проводящей подложкой (контактной платформой), подключаются к Touch-контроллеру, который выполняют на базе любой интегральной схемы - сенсорного контроллера, например, на базе ИС ТТР23.
Дифференциальные сигналы поступающие, например, от датчиков давления, усиливаются при помощи дифференциальных усилителей, при помощи АЦП преобразуются в цифровую форму и обрабатываются управляющим контроллером для нормализации полученных результатов. Инерциальный сенсор IMU 9020 подключается с помощью интерфейса SPI к цифровой шине управляющего контроллера. С помощью интерфейса SPI к цифровой шине управляющего контроллера подключается и термопарный контроллер МАХ31855 с подключенной к нему измерительной термопарой. Обработанные данные предаются с помощью HTTP - сервера с использованием протокола обмена данными, основанного на спецификации JSON.
Пример. Выполнение задания по препарированию зуба (начальный уровень подготовки студентов к оперативной дентистрии)
Шаг 1. После подробного изучения технического задания, обучающийся с помощью USB-мыши кликает иконку со словом Start (старт)
Шаг 2. После нажатия иконки Старт программа предлагает выбрать определенный бор определенной фирмы, который обозначен в библиотеке программы.
ВАЖНО! Работать на фантоме НЕОБХОДИМО только борами фирм-производителей из библиотеки
Шаг 3. Затем программа предлагает выбрать тип бора - Carbide (твердосплавный) или алмазную головку Diamonds (алмазный), а также форму и размер бора.
Шаг 4. Размер бора соответствует номеру в каталоге фирмы-производителя. В данном примере выбираем бор Н21-008, где Н21 это его длина, а 008 - диаметр.
ВАЖНО! Работать НЕОБХОДИМО точно таким же бором, который выбрали в программе. Если в процессе препарирования необходимо заменить бор, то эту задачу НЕОБХОДИМО указать в программе.
Бор устанавливают в наконечник, обучающийся щелкает иконку ОК.
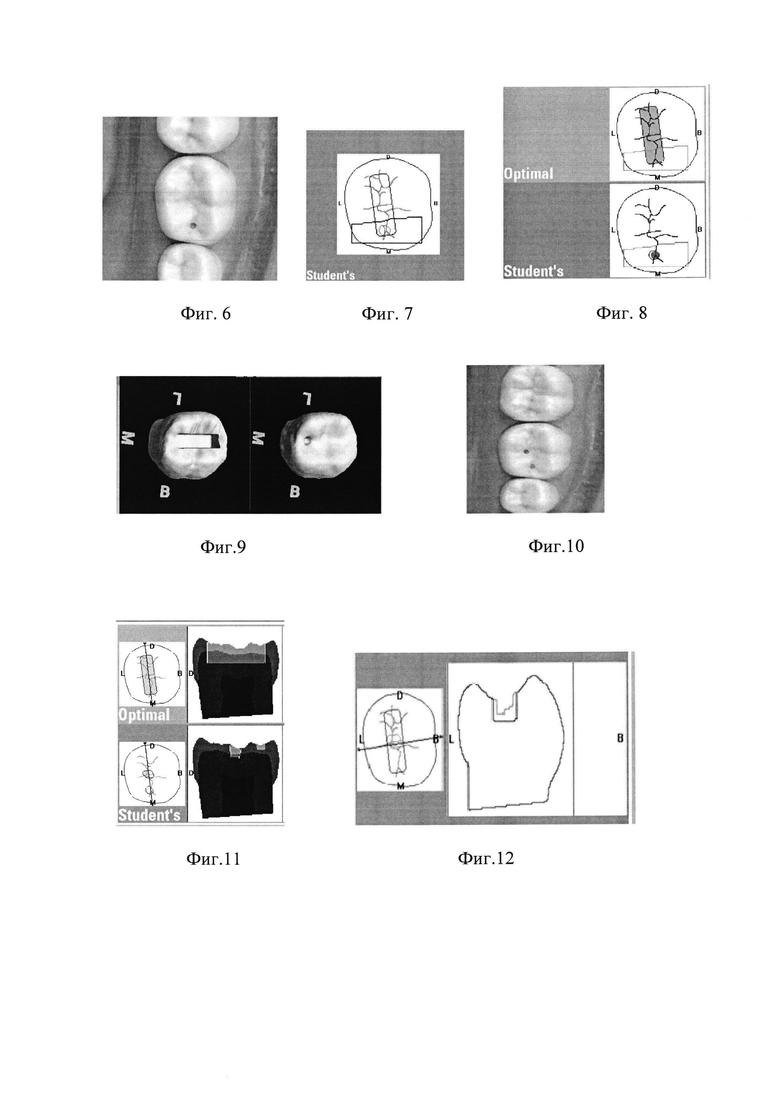
Шаг 5. (Фиг. 6). После нажатия на иконку ОК начинается отсчет времени на выполнение работы (препарирования).
Шаг 6. (Фиг. 7). Изучив задание и выбрав соответствующий бор, студент начинает препарирование бором в предполагаемом расположении полости с медиальной стороны, погружаясь на 1/3 глубины полости, которую должен сформировать (планируемой полости), параметры которой ему помогает определить программа. В последствии обучающий нажимает на иконку с диаграммой и оценивает правильность своих действий, сравнивая с оптимальным препарированием.
Шаг 7. (Фиг. 8). Синяя линия показывает границу оптимального препарирования, розовая линия - первоначальное расположение области препарирования студентом. Четко видно, что студент начал свои действия в правильных координатах, не выходя за синюю границу от оптимального препарирования, а это значит, что студенту необходимо продвигать бор в дистальном направлении.
Шаг 8. (Фиг. 9). Пройдя на 1/3 глубины препарирования, необходимо проконтролировать результаты в списке сообщений. В данной ситуации видим, что у студента первоначальная точка препарирования в медиальной области отмечена коричневым цветом. Цветная шкала нам показывает, что студент проник на 1/3 от основной (оптимальной) глубины. Далее студент должен аккуратно повторить манипуляцию с учетом уже имеющихся данных, чтобы добиться оптимальной глубины.
Шаг 9. (Фиг. 10 и 11). После оценки проделанной работы студент препарирует вторую полость, продвигаясь незначительно в дистальную сторону симметрично от первой полости на 1/2 от оптимальной глубины препарирования.
Шаг 10. (Фиг. 12). После прохождения второй полости на  глубины формируемой полости на фантомной модели (А), студент оценивает свои манипуляции на мониторе (Б). На рисунке хорошо видно, что вторая полость глубже первой и симметрична оптимальной полости.
глубины формируемой полости на фантомной модели (А), студент оценивает свои манипуляции на мониторе (Б). На рисунке хорошо видно, что вторая полость глубже первой и симметрична оптимальной полости.
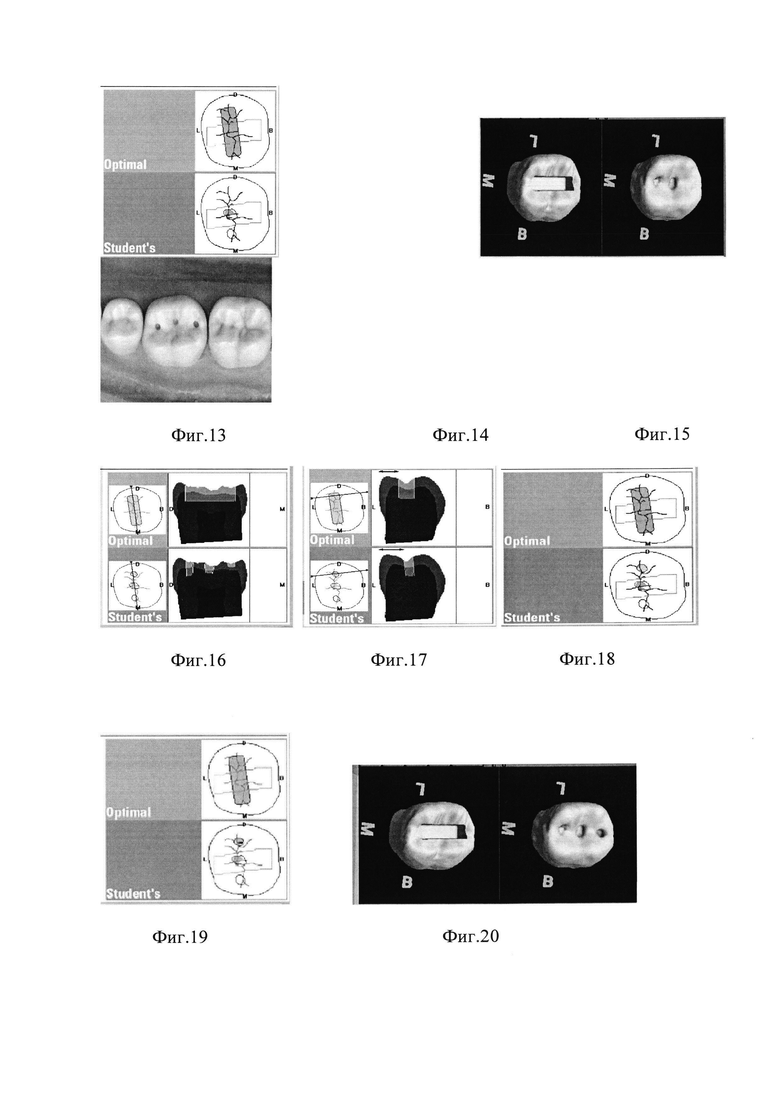
Шаг 11. (Фиг. 13) В списке сообщений программа демонстрирует основные ошибки. В данном случае студент вторую полость не сформировал, но не вышел за границы оптимального препарирования, что на данном этапе является правильной тактикой работы.
Шаг 12. (Фиг. 14, 15) По шкале глубины студент видит, что вторая полость гораздо глубже первой, она уже обозначена оранжевым цветом - студент дошел в среднем до половины от оптимальной глубины формируемой полости.
Шаг 13. (Фиг. 16) Имея небольшой опыт по препарированию, студент аккуратно препарирует (формирует) третью полость (А) в дистальном отделе фантомного зуба (Б) вдоль продольной оси зуба, ориентируясь по двум предыдущим полостям.
Шаг 14. (Фиг. 17) Ориентируясь на форму и глубину двух ранее сформированных полостей, студент препарирует в дистальной области третью полость на максимальную глубину планируемой глубины основной полости.
Шаг 15. (Фиг. 18) В данном случае в списке сообщений программа указывает студенту, что ему нужно аккуратно работать в дистальном отделе, т.к. он близко подошел к границе препарирования щечной (буккальной) стенки, и обратить свое внимание на язычную (лингвальную) стенку.
Шаг 16. (Фиг. 19) По шкале глубины полости видно, что в дистальном отделе третья полость отмечается желтым цветом, это говорит о практически оптимальной глубине препарирования. Третья полость будет ориентиром в дальнейшей работе по глубине формируемой полости.
Шаг 17. (Фиг. 20) В списке сообщений студент получает информацию о гладкости дна всех трех полостей, третья полость по цвету темнее по шкале гладкости и это значит, что необходимо эту ошибка исправит в процессе последующего препарирования полости.
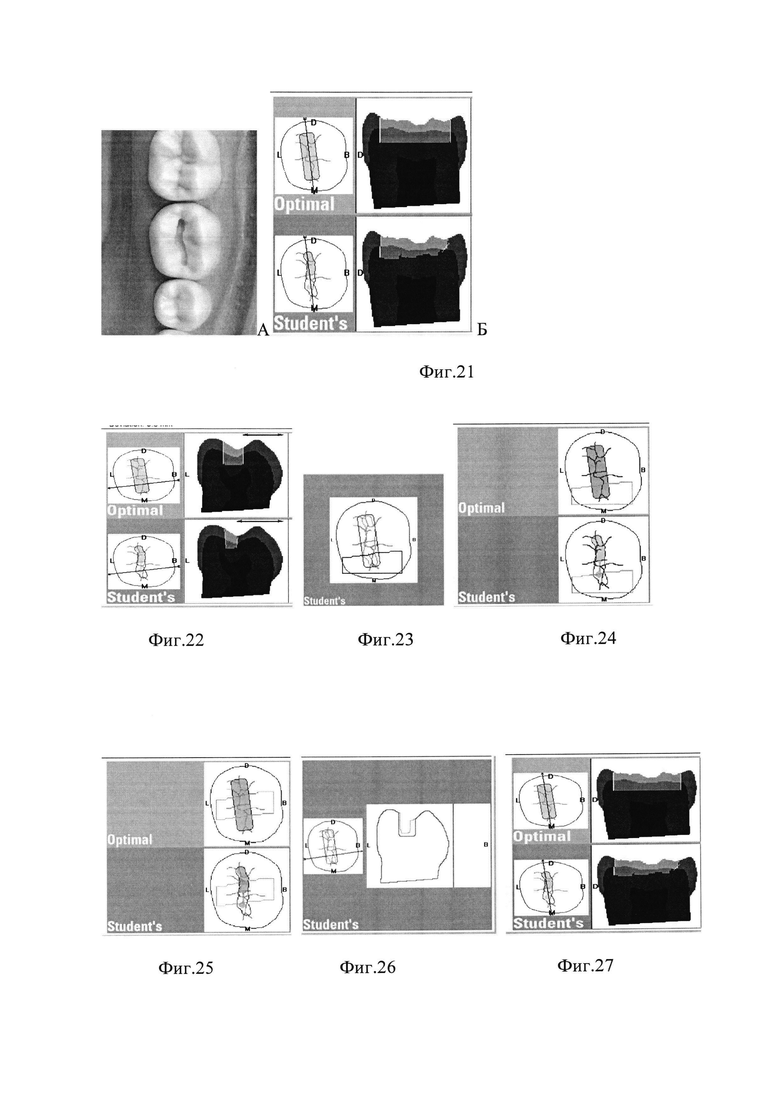
Шаг 18. (Фиг. 21) Студент, имея ориентиры препарирования в виде трех полостей, соединяет эти полости в одну, начиная с дистальной полости т.к. она оптимальная по глубине, двигаясь в медиальном направлении и не меняя глубины, доводит бор до первой полости. До этого программа оценивала студента на 72 балла (Grade-оценка) из 100.
Шаг 18. (Фиг. 22) Соединив три полости в оду (А), студент видит на мониторе (Б), что он изменил глубину в (медиальной области) второй полости к первой полости, программа оценила полость студента на 52 балла из 100
Шаг 19. (Фиг. 23) В списке сообщений программа обращает внимание студента на медиальную область - ему необходимо обратить внимание на щечную (буккальную) сторону, которую необходимо увеличить до оптимального препарирования.
Шаг 20. (Фиг. 24) Программа указывает на грубые ошибки студента. В данном случае студент не допрепарировал по границе оптимальной полости.
Шаг 21. (Фиг. 25) На этом этапе, по школе глубины препарирования, видно, что студент, практически препарируя, сформировал полость до оптимальной глубины (светло-желтый цвет).
Шаг 22. (Фиг. 27) Программа указывает на гладкость дна препарированной полости. Студент изменил глубину в медиальной области и следовательно, дно полости будет неровным в данной участке.
Шаг 23. (Фиг. 27) В медиальной (передней) области студент не выдержал параметры глубины в процессе препарирования, программа отмечает о недостаточность препарирования в данном участке.
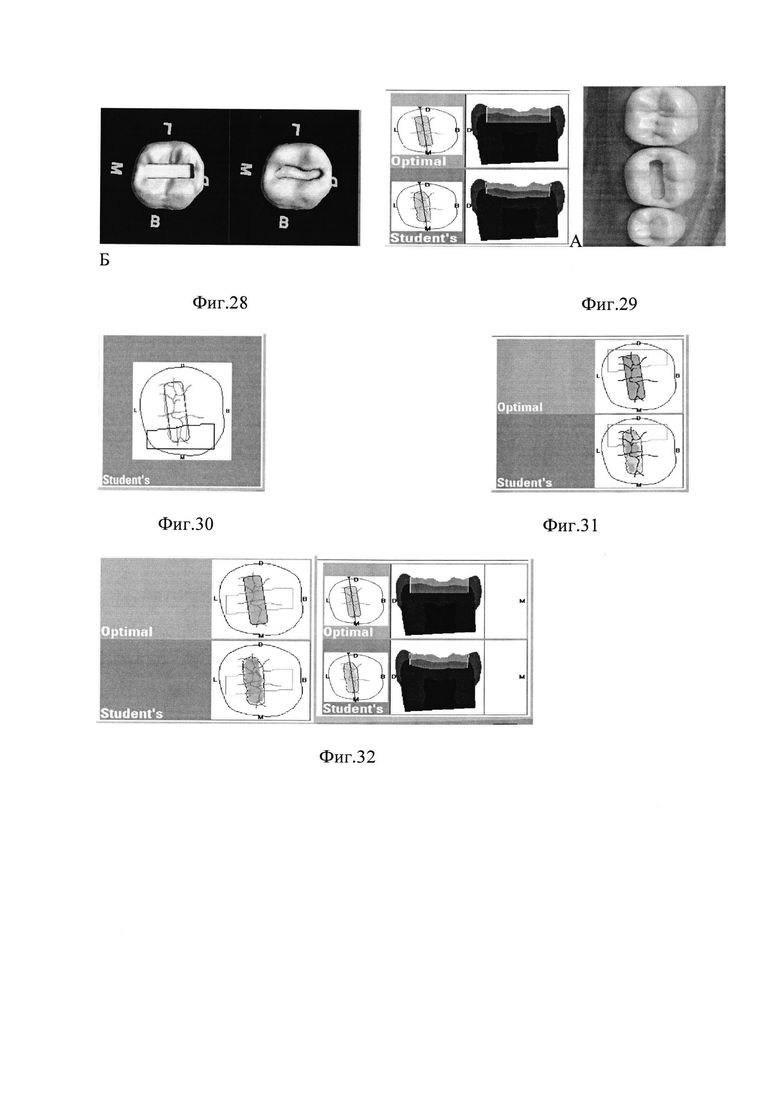
Шаг 24. (28) Программа показывает основные ошибки и вычитание баллов в списке сообщений. На данном этапе можно было бы остановиться, но студент знает о своих ошибках и не удовлетворительной оценке, которые можно еще исправить и решается на дальнейшие действия.
Шаг 25. (Фиг. 29) Студент, зная свои ошибки и недочеты, аккуратно проводит заключительный этап - финирование границ препарируемой полости.
Шаг 26. (Фиг. 30) При помощи финирования препарированной полости с соблюдением правил эргономики и исправлений ошибок на этапах препарирования студент завершил работу на отлично с 97 баллами из 100
Шаг 27. (Фиг. 31) Студент точно сформировал границы полости, в соответствии с полученным заданием.
Компьютерный анализ (оценка) сформированной студентом полости
Шаг 28. (Фиг. 32) Программа вычла 1 балл за недостаточную точность при препарировании зуба, на этапе формирования глубины полости.
Шаг 29. Программа вычла 2 балла за недостаточную гладкость дна препарированной полости.
| название | год | авторы | номер документа |
|---|---|---|---|
| Smart-зуб для стоматологического антропоморфного робота | 2022 |
|
RU2813332C1 |
| Smart-челюсть для стоматологического антропоморфного робота | 2024 |
|
RU2835076C1 |
| Smart-зуб для стоматологического антропоморфного робота | 2024 |
|
RU2838628C1 |
| СПОСОБ ТОПОГРАФИЧЕСКОГО ОПРЕДЕЛЕНИЯ ГРАНИЦ ПОЛОСТИ ЗУБА | 2018 |
|
RU2687829C1 |
| Способ забора дентинной жидкости зуба | 2019 |
|
RU2737492C1 |
| Способ комплексной обработки системы корневого канала зуба при лечении воспалительных заболеваниях пульпы | 2019 |
|
RU2707502C1 |
| Способ неинвазивной молекулярно-биологической диагностики болезней пульпы | 2020 |
|
RU2740429C1 |
| Способ непосредственной дентальной имплантации | 2017 |
|
RU2652585C1 |
| Способ прогнозирования результата дентальной имплантации | 2017 |
|
RU2651764C1 |
| Способ извлечения отломка эндодонтического инструмента из корневого канала зуба | 2022 |
|
RU2821192C2 |
Изобретение относится к медицине, в частности к стоматологии, и может быть использовано для обучения и совершенствования навыков студентов при стоматологических вмешательствах. Smart-челюсть содержит проводящую подложку с измерительными и функциональными датчиками и установленные в проводящей подложке съемные smart-зубы с внутренними сигнальными прослойками для контакта со стоматологическим инструментом. Съемные smart-зубы содержат установочные подложки для соединения со средствами электронного управления и контактные площадки с фигурными рабочими поверхностями, размещенными в ответных выемках, выполненных в установочных подложках. При этом внутренние сигнальные прослойки выполнены в виде токопроводящего геля, размещенного в корневых каналах и в пульпарных полостях, объем каждой из которых как минимум на 1/4 превышает суммарный объем полостей корневых каналов в одном smart-зубе. Фигурные рабочие поверхности контактных площадок выполнены с возможностью электрического соединения токопроводящего геля с установочными подложками и соединены с нижней частью корневых каналов. Достигается повышение эффективности обучения путем расширения имитационного функционала smart-челюсти, содержащего съемные smart-зубы. 4 з.п. ф-лы, 32 ил., 1 пр.
1. Smart-челюсть, содержащая проводящую подложку с измерительными и функциональными датчиками и установленные в проводящей подложке съемные smart-зубы с внутренними сигнальными прослойками для контакта со стоматологическим инструментом, отличающаяся тем, что съемные smart-зубы содержат установочные подложки для соединения со средствами электронного управления и контактные площадки с фигурными рабочими поверхностями, размещенными в ответных выемках, выполненных в установочных подложках, при этом внутренние сигнальные прослойки выполнены в виде токопроводящего геля, размещенного в корневых каналах и в пульпарных полостях, объем каждой из которых как минимум на 1/4 превышает суммарный объем полостей корневых каналов в одном smart-зубе, а фигурные рабочие поверхности контактных площадок выполнены для электрического соединения токопроводящего геля с установочными подложками и соединены с нижней частью корневых каналов.
2. Smart-челюсть по п. 1, отличающаяся тем, что содержит по меньшей мере один датчик, выполненный в виде регистратора внешнего давления, по меньшей мере один датчик, выполненный в виде регистратора температурного воздействия, и по меньшей мере один датчик, выполненный в виде измерителя глубины введения инструмента в имитатор зуба.
3. Smart-челюсть по п. 1, отличающаяся тем, что содержит измерительные и функциональные датчики со световой сигнализацией.
4. Smart-челюсть по п. 1, отличающаяся тем, что содержит измерительные и функциональные датчики со звуковой сигнализацией.
5. Smart-челюсть по п. 1, отличающаяся тем, что содержит жесткое полимерное основание и имитатор десны в виде мягкой накладки.
| US 2011136090 A1, 09.06.2011 | |||
| WO 2012156287 A1, 22.11.2012 | |||
| 0 |
|
SU180218A1 | |
| СТОМАТОЛОГИЧЕСКИЙ ФАНТОМ | 2007 |
|
RU2349966C1 |
| СПОСОБ ПОЛУЧЕНИЯ ЧЕТВЕРТИЧНЫХ АММОНИЕВЫХ СОЛЕЙ | 0 |
|
SU187802A1 |
| ЯНУШЕВИЧ О.О | |||
| и др | |||
| Стоматологический антропоморфный робот | |||
| Новая эра в имитации врачебных манипуляций и клинического приема // Cathedra | |||
| Стоматологическое образование, 2021, N 78, с | |||
| Нефтяной конвертер | 1922 |
|
SU64A1 |

