Изобретение относится к стоматологии и может быть использовано для обучения и совершенствования навыков студентов при различных стоматологических вмешательствах.
Известно устройство для обучения навыкам препарирования зубов, представляющее собой smart-челюсть, содержащую проводящую подложку с измерительными и функциональными датчиками и установленными в проводящей подложке съемными smart-зубами с внутренними сигнальными прослойками для контакта со стоматологическим инструментом (О.О. Янушевич и др. Стоматологический антропоморфный робот. Новая эра в имитации врачебных манипуляций и клинического приема // Cathedra. Стоматологическое образование, 2021, №78, с. 64-67).
Сложность конструкции, объединяющей smart-зубы и smart-челюсть относится к недостаткам известного технического решения.
Более близкими аналогами изобретений, составляющих группу, можно считать smart-челюсть для стоматологического антропоморфного робота, известную из описания изобретения к патенту RU 2814393 С1, 28.02.2024 и Smart-зуб для стоматологического антропоморфного робота, который известен из описания изобретения к патенту RU 2813332 С1, 12.02.2024.
Известные устройства могут использоваться друг с другом, но не полная имитация реального стоматологического вмешательства относится к их недостаткам.
Изобретение направлено на решение технической проблемы, заключающейся в создании smart-челюсти и smart-зуба, не имеющих недостатков известных конструкций.
Техническим результатом изобретения является оптимизация и регулировка усилия, необходимого для извлечения зуба.
Сущность изобретения выражается в совокупности существенных признаков, в которой предложен сменный smart-зуб для smart-челюсти образовательного стоматологического антропоморфного робота, который содержит установочный стакан с отверстием, выполненного с возможностью фиксации к smart-челюсти, внешнюю часть зуба и расширяющуюся от внешней части зуба фиксирующую часть зуба, которая расположена в сужающейся к внешней части зуба полости установочного стакана, выполненного с возможностью извлечения расширяющейся фиксирующей части из сужающейся к внешней части полости, причем внешняя часть зуба выполнена из полимерного материала, который получен аддитивным методом, а фиксирующую часть зуба дополнительно предназначена для удержания зуба в состоянии без нагрузки, а также для сопротивления усилиям, оказываемым в направлении вертикально перпендикулярном от фиксирующей части к внешней части зуба, при этом фиксирующая часть покрыта проводящим покрытием, выполненного с возможностью электрического контакта стоматологического инструмента и сенсоров умной челюсти, причем сменный smart-зуб дополнительно содержит клеящий состав, наносимый на поверхность фиксирующей части зуба и выполненный с возможностью создания сопротивления усилию, динамически уменьшающегося в процессе многократной деформации клеевого соединения в процессе выполнения обучаемым действий, направленных на расшатывание зуба, при этом форма фиксирующей части зуба выполнена в форме «ласточкин хвост» и реализована с возможностью механического сопротивления основному усилию в направлении вертикально перпендикулярном от фиксирующей части к внешней части зуба.
Сменный smart-зуб для smart-челюсти содержит установочный стакан с отверстием для фиксации к smart-челюсти, коронку и расширяющуюся от коронки корневую часть, которая расположена в сужающейся к коронке полости установочного стакана, выполненного из упругого материала для извлечения расширяющейся корневой части из сужающейся к коронке полости.
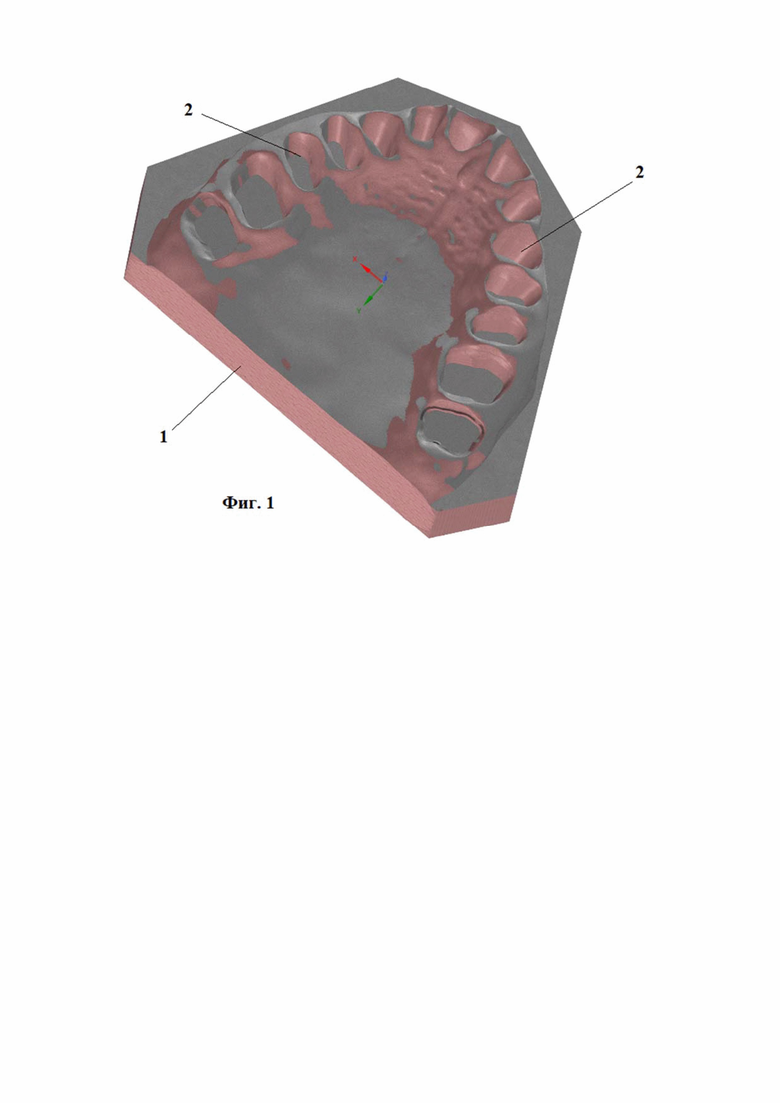
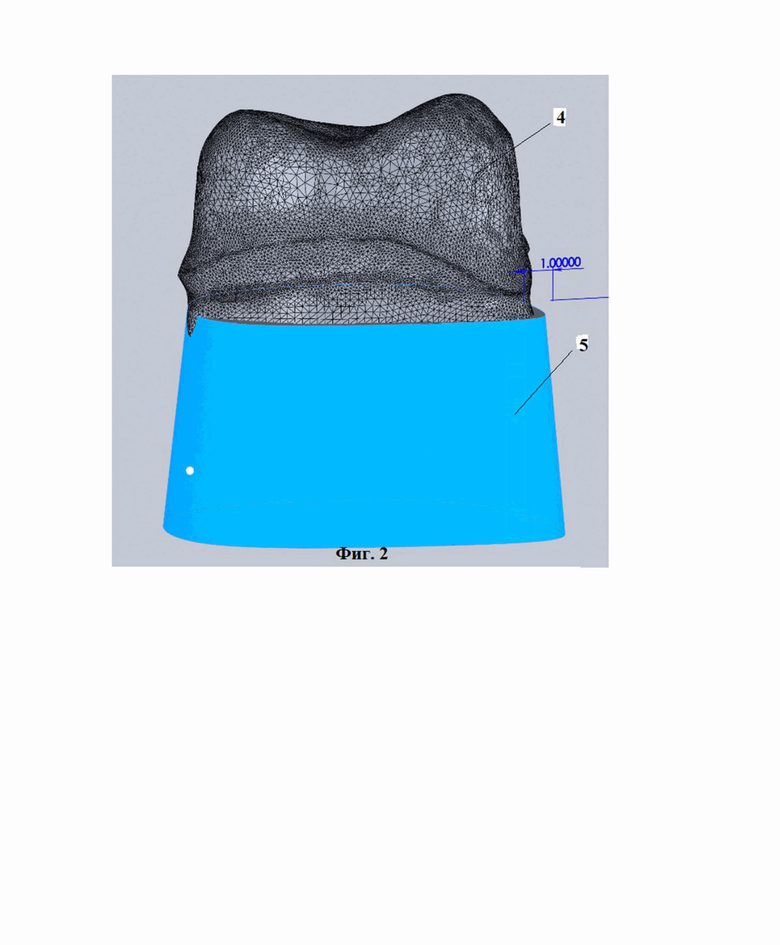
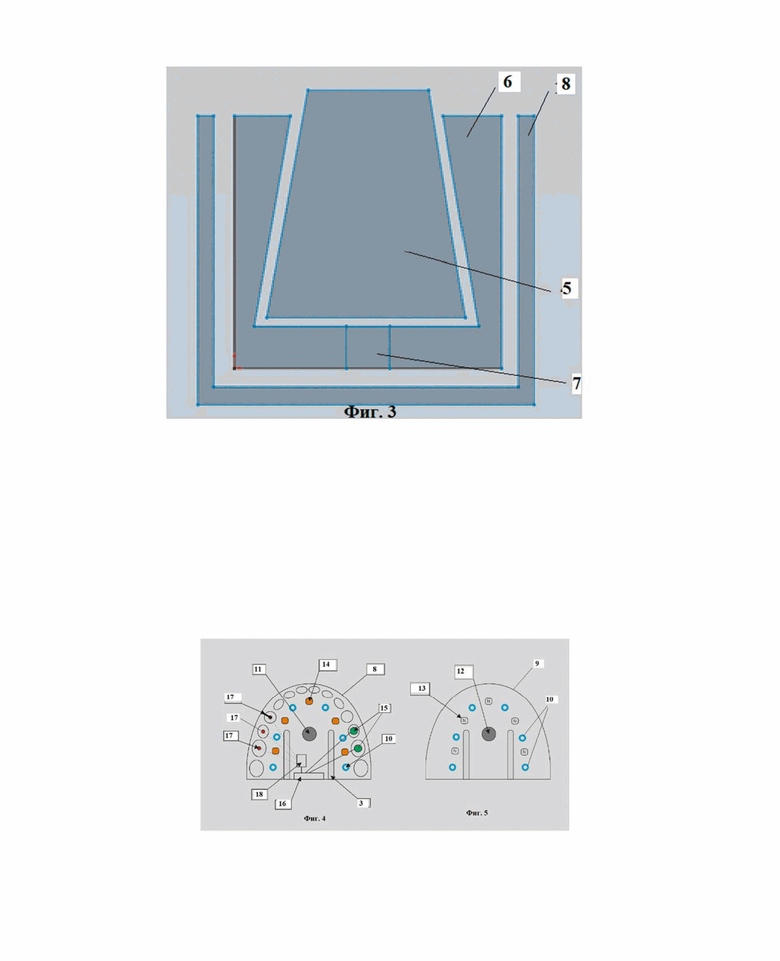
Сущность группы изобретений поясняется чертежом, где на фиг. 1 дан общий вид smart-челюсти, на фиг. 2 - структура smart-зуба, на фиг. 3 - схема крепления отдельного smart-зуба в основании smart-челюсти и на фиг. 4 и 5 - нижняя и верхняя пластины, образующие основание smart-челюсти.
Smart-челюсть представляет собой полимерное или металлическое основание 1 с формой, приближенной к натуральной. В месте расположения smart-зубов в основании 1 выполнены выемки 2, предназначенные для крепления съемных smart-зубов и установочные выемки 3, предназначенные для крепления smart-челюсти, например, на стоматологическом антропоморфном роботе. Smart-челюсть снабжена измерительными датчиками, функциональными датчиками и установленными на основании 1 съемными smart-зубами. Smart-зубы содержат коронки 4, корневые части 5, сигнальные средства контакта со стоматологическим инструментом и установочные стаканы 6 с отверстиями 7 для фиксации к smart-челюсти. Корневые части 5 smart-зубов расширяются от коронок 4 и расположены в сужающихся к коронкам 4 полостях установочных стаканов 6. Стаканы 6 выполнены из упругого материала для извлечения расширяющихся корневых частей 5 из сужающихся к коронкам 4 полостей. Основание 1 выполнено в виде двух пластин 8 и 9. Пластины 8 и 9 основания 1 соединены крепежными пружинами 10 и шаровой опорой 11. Шаровая опора 11 выполнена с возможностью установки в крепежной площадке 12 верхней пластины 9, снабженной постоянными неодимовыми магнитами 13. Магниты 13 размещены напротив аналоговых датчиков 14 (датчиков Холла SS49E), расположенных на нижней пластине 8 для определения расстояния между пластинами 8 и 9. Нижняя пластина 8 выполнена с, как минимум, одной контактной площадкой 15 из материала константан для определения температуры smart-зуба путем формирование термопары J-типа с ответной стальной площадкой в smart-зубе и снабжена разъемом 16 для подключения контроллера. Сигнальные средства контакта smart-зуба со стоматологическим инструментом выполнены в виде сигнальных контактных площадок или датчиков 17, соединенных с микросхемой 18.
Использование, как минимум, одной контактной площадки 15 из различных материалов (константан и железо/сталь) позволяет сформировать термопару J-типа в месте крепления smart-зуба к smart-челюсти, что в свою очередь позволяет обеспечить измерение температуры smart-зуба в реальном времени
Наличие крепежных пружин 10 между нижней 8 и верхней 9 половинами smart-челюсти позволяет изменять расстояние от датчиков 14 (датчиков Холла) до магнитов 13 в точках их нахождения в зависимости от величины давления на соответствующий сегмент smart-челюсти. Обработка полученных данных о расстоянии в указанных точках позволяет получить данные о величине давления.
Наличие датчиков касания позволяет обеспечить отслеживание факта касания проводящими медицинскими инструментами (в том числе, пневматическими, в которых электрический контакт обеспечивается через подшипники инструмента) проводящего материала, располагаемого в требуемых местах smart-зуба. Частным случаем может являться отслеживание факта успешного попадания инструментом в требуемые участки зубной ткани.
Коронка 4 (внешняя часть) smart-зуба, выполненная из полимерного материала. Выполняется аддитивным методом (один из возможных вариантов - 3D печатью из порошковых полимерных материалов или фотоотверждаемого полимера).
Корневая часть 5 smart-зуба, обеспечивающая его удержание в состоянии без нагрузки, а также сопротивление усилиям, оказываемым в осевом направлении. При необходимости детектирования соприкосновения стоматологического инструмента с поверхностью корневой (фиксирующей) части 5 smart-зуба может покрываться проводящим покрытием, обеспечивающим электрический контакт стоматологического инструмента и сенсоров smart-челюсти.
Форма корневой (фиксирующей) части 5 smart-зуба выбирается таким образом, чтобы обеспечить механическое сопротивление основному извлекающему усилию в осевом направлении. Один из вариантов такой формы - «ласточкин хвост» показан на Фиг. 3. При выборе такой формы величина сопротивления напрямую зависит от угла расклинивания. Таким образом может быть обеспечена оптимизация/регулировка усилия, необходимого для извлечения зуба.
Клеящий состав (один из возможных вариантов - клеевые составы на основе натуральных и синтетических каучуков), наносимый, при необходимости на поверхность корневой (фиксирующей) части 5 smart-зуба, предназначен для создания дополнительного сопротивления усилию, динамически уменьшающегося в процессе многократной деформации клеевого соединения и выполнения обучаемым характерных действий, направленных на «расшатывание» smart-зуба.
| название | год | авторы | номер документа |
|---|---|---|---|
| Smart-челюсть для стоматологического антропоморфного робота | 2024 |
|
RU2835076C1 |
| Smart-челюсть для стоматологического антропоморфного робота | 2022 |
|
RU2814393C1 |
| Smart-зуб для стоматологического антропоморфного робота | 2022 |
|
RU2813332C1 |
| УСТРОЙСТВО ДЛЯ УДАЛЕНИЯ ОДИНОЧНЫХ КОРНЕЙ НА ВЕРХНЕЙ И НИЖНЕЙ ЧЕЛЮСТЯХ | 2021 |
|
RU2775194C1 |
| Стоматологический алмазный сепарационный диск с износостойким нанопокрытием | 2023 |
|
RU2808378C1 |
| Дентомодель для обучения технике лечения циркулярного кариеса и гигиены полости рта | 2020 |
|
RU2738043C1 |
| Способ ортодонтического лечения пациентов с зубочелюстными аномалиями и деформациями при помощи брекет-системы с пазом 0,018 дюйма и дуг прямоугольного сечения | 2024 |
|
RU2840444C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ЗУБА С ПОМОЩЬЮ РАЗБОРНОЙ ИСКУССТВЕННОЙ КОРОНКИ | 2023 |
|
RU2816225C1 |
| Способ определения эффективности стоматологического лечения | 2019 |
|
RU2706545C1 |
| Устройство и способ для определения рабочей длины в процессе эндодонтического лечения зубов, покрытых ортопедическими конструкциями из сплавов металлов | 2018 |
|
RU2687772C1 |
Изобретение относится к медицинской технике. Сменный smart-зуб для smart-челюсти образовательного стоматологического антропоморфного робота содержит установочный стакан с отверстием для фиксации к smart-челюсти, внешнюю часть и расширяющуюся от внешней части фиксирующую часть. Фиксирующая часть расположена в сужающейся к внешней части полости установочного стакана. Внешняя часть выполнена из полимерного материала. Фиксирующую часть предназначена для удержания зуба в состоянии без нагрузки, а также для сопротивления усилиям, оказываемым в направлении, вертикально перпендикулярном от фиксирующей части к внешней части зуба. Клеящий состав smart-зуба нанесен на поверхность фиксирующей части для создания сопротивления усилию, динамически уменьшающемуся в процессе многократной деформации клеевого соединения в процессе выполнения обучаемым действий, направленных на расшатывание зуба. Фиксирующая часть выполнена в форме «ласточкин хвост» и реализована с возможностью механического сопротивления основному усилию в направлении, вертикально перпендикулярном от фиксирующей части к внешней части зуба. Достигается оптимизация и регулировка усилия, необходимого для извлечения зуба. 5 ил.
Сменный smart-зуб для smart-челюсти образовательного стоматологического антропоморфного робота, который содержит установочный стакан с отверстием, выполненный с возможностью фиксации к smart-челюсти, внешнюю часть зуба и расширяющуюся от внешней части зуба фиксирующую часть зуба, которая расположена в сужающейся к внешней части зуба полости установочного стакана, выполненного с возможностью извлечения расширяющейся фиксирующей части из сужающейся к внешней части полости, причем внешняя часть зуба выполнена из полимерного материала, который получен аддитивным методом, а фиксирующую часть зуба дополнительно предназначена для удержания зуба в состоянии без нагрузки, а также для сопротивления усилиям, оказываемым в направлении, вертикально перпендикулярном от фиксирующей части к внешней части зуба, при этом фиксирующая часть покрыта проводящим покрытием, выполненным с возможностью электрического контакта стоматологического инструмента и сенсоров умной челюсти, причем сменный smart-зуб дополнительно содержит клеящий состав, наносимый на поверхность фиксирующей части зуба и выполненный с возможностью создания сопротивления усилию, динамически уменьшающегося в процессе многократной деформации клеевого соединения в процессе выполнения обучаемым действий, направленных на расшатывание зуба, при этом форма фиксирующей части зуба выполнена в форме «ласточкин хвост» и реализована с возможностью механического сопротивления основному усилию в направлении, вертикально перпендикулярном от фиксирующей части к внешней части зуба.
| Smart-зуб для стоматологического антропоморфного робота | 2022 |
|
RU2813332C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕРАПЕВТИЧЕСКОГО ПОЛОЖЕНИЯ НИЖНЕЙ ЧЕЛЮСТИ ПРИ ПОВЫШЕННОЙ СТИРАЕМОСТИ ЗУБОВ | 2020 |
|
RU2737584C1 |
| JP 5363181 B2, 11.12.2013 | |||
| JP 2017009838 A, 12.01.2017 | |||
| US 2011136090 A1, 09.06.2011 | |||
| WO 2012156287 A1, 22.11.2012 | |||
| DE 10217691 C1, 18.06.2003. | |||

