Область техники
Заявляемое изобретение относится к тренировочным устройствам, возможно его применение в таких областях человеческой деятельности, как управление компьютерными играми, перемещение по виртуальной реальности, развлечение детей и взрослых, или как силовой тренажёр для ходьбы и бега. Данное устройство может использоваться в квартирах, спортзалах, а также обучающих центрах.
Уровень техники
Из современного уровня техники известны устройства со схожим назначением, например, всенаправленная беговая дорожка «Omni directional treadmill - ODT» по патенту США №6152854 (заявка 09/255162; МПК A63B 24/00. Опубл. 22.02.1999 г.) [1]. Устройство является широкой беговой дорожкой, вращающейся между двумя барабанами, она составлена из тонких дорожек, которые вращаются поперёк движения беговой дорожки. Ленты, составляющие поверхность, схожи с теми, которые применяются в обычных беговых дорожках. Система контроля над передвижением пользователя не позволяет смещаться к краям устройства, возвращая его в центр дорожки. Недостатком этого устройства является невозможность реализации на нём движений имитирующих подъём пользователя по ступеням, так как вся верхняя поверхность беговой дорожки движется, и подъёмные платформы, предназначенные для поддержки ног пользователя невозможно расположить на вращающейся ленте. Приспособления для отслеживания передвижения ног пользователя в данном устройстве могут быть расположены только за пределами подвижных частей, в значительном удалении от пользователя, что исключает возможность применение приспособлений для отслеживания, которые контактируют с подошвами (стопами) ног пользователя. Приспособления, отслеживающие передвижения ног пользователя, расположенные на подошвах (стопах) или на минимальном расстоянии от них значительно сокращают время задержки в системе управления, а в приведённом аналоге данное расположение невозможно из-за конструкции устройства.
Аналогом заявляемому устройству выбран аппарат для моделирования виртуальной реальности по патенту США №6102832 (заявка 08/907025; МПК A63B 24/00. Опубл. 06.08.1997 г.) [2]. Устройство включает в себя механизм, моделирующий поверхность для ходьбы, состоящий из двух площадок для ног, поддерживающие стопы пользователя, также в состав устройства входит приспособление, отслеживающее каждую ногу пользователя по отдельности и генерирующее сигналы об их позиции и положении, а также устройство, которое горизонтально перемещает площадки для ног в в соответствии с движением стопы пользователя для сохранения контакта между его стопой и площадкой для ног. Устройство горизонтального перемещения площадок для ног в патенте-аналоге предлагается реализовать при помощи пространственной кинематической цепи, состоящей из нескольких шарнирных соединений, объединённых в кинематическую цепь, обеспечивающих поддержку, а также позволяют перемещать площадки для ног. Существенным недостатком аналога является использование в его схеме пространственной кинематической цепи, состоящей из нескольких шарнирных соединений, что даёт негативный эффект в виде возникновения больших нагрузок на излом кинематической цепи, когда шаговая площадка горизонтально перемещается. Но главным недостатком аналога является отсутствие углового поворота в обе стороны вокруг общего центра для кинематических цепей. В патенте аналога предлагается использовать, поворотные основания для каждой кинематической цепи в отдельности, что исключает возможность пользователю изменять направление своего движения на большие углы поворота.
Наиболее близким по своей технической сущности является выбранное в качестве прототипа техническое решение по патенту на полезную модель №109979 «Многофункциональный спортивный тренажер» (заявка 2011134276/12; МПК A63B 21/00. Опубл. 10.11.2011 г.) [3]. В прототипе рабочее место пользователя выполнено в виде подвижной платформы с возможностью углового поворота в обе стороны с двумя подвижными площадками для ног пользователя, установленными с возможностью перемещения по выделенным для них продольным направляющим.
Недостатком прототипа является то, что площадки для ног и направляющие, по которым они перемещаются, расположены на общей для них подвижной платформе с угловым поворотом, и когда пользователь изменяет направление своего движения в любую из боковых сторон, то подвижная платформа также должна совершать угловой поворот, а так как на ней установлены обе площадки для ног, и опорная площадка, т. е. площадка с опорной ногой, не только перемещается назад в противоположную сторону от направления движения пользователя, но и при угловом повороте подвижной платформы происходит боковое смещение опорной площадки. Если согласно устройству-прототипу пользователь, намереваясь сделать резкий поворот, передвигает ногу в бок, но передумав возвращает её назад в исходное положение, подвижная платформа осуществит два противоположных угловых поворота, а опорная площадка, т. е. площадка с опорной ногой, совершит два противоположные боковых смещения относительно направления движения пользователя, которые выведут его из равновесия и спровоцируют падение. Сила бокового смещения опорной площадки, т. е. площадки с опорной ногой, будет увеличиваться в зависимости о того, насколько опорная площадка удалена от центра углового поворота подвижной платформы, чем дальше она находится, тем сильнее будет боковое смещение. Когда пользователь опирается на одну ногу, его стопа хорошо воспринимает нагрузки спереди и сзади, перенося их с носка на пятку, а силы , воздействующие на пользователя с боку, компенсируются шириной стопы, которая имеет меньшую опору, и пользователю сложнее удерживать равновесие при боковом смещении опорной площадки.
Проанализировав конструкцию и работу прототипа, можно сделать вывод, что он не может предоставить пользователю возможности комфортного и реалистичного всенаправленного пешего передвижения с осуществлением разнообразных вариаций ходьбы и бега.
Задачей, на решение которой направлено заявляемое изобретение, является расширение функциональности и улучшение рабочих характеристик устройства, а также повышение удобства и безопасности его использования, и повышения реалистичности осуществления на нём всенаправленного пешего передвижения с реализацией разнообразных вариаций ходьбы и бега.
Раскрытие изобретения
Поставленная задача решается тем, что тренажер для симуляции всенаправленного пешего передвижения пользователя содержит рабочее место пользователя, выполненное в виде подвижной платформы с возможностью углового поворота в обе стороны с двумя подвижными площадками для ног пользователя, установленными с возможностью перемещения по выделенным для них продольным направляющим, и согласно изобретению, на подвижной платформе закреплены поперечные направляющие, на которых подвижно установлены продольные направляющие, имеющие возможность перемещения над центром углового поворота подвижной платформы.
При этом у тренажера согласно изобретению верхняя часть площадки для ног содержит механизм углового поворота в обе стороны.
При этом у тренажера согласно изобретению поперечные направляющие могут быть общими для продольных направляющих обеих площадок или продольные направляющие каждой площадки могут быть подвижно установлены на своих поперечных направляющих.
При этом тренажер согласно изобретению содержит детекторный блок, в который входят приспособления, отслеживающие расположение стоп на верхней части площадки и передвижение ног пользователя, а также приспособления, отслеживающие размещение верхней поверхности и горизонтальное перемещение площадок для ног.
При этом тренажер согласно изобретению содержит блок электроприводов, включающий в себя прибор управления и электромеханические компоненты.
При этом тренажер, согласно изобретению, содержит приспособление для осуществления плавного старта и торможения площадок для ног.
При этом у тренажера, согласно изобретению, верхние поверхности площадок для ног могут быть выполнены круглыми, или овальными, или прямоугольными, или прямоугольными со скошенными углами.
При этом у тренажера, согласно изобретению, верхние поверхности оборудованы механизмами подъема/опускания и изменения угла наклона.
При этом у тренажера, согласно изобретению, продольные и поперечные направляющие могут быть линейными или криволинейными.
При этом у тренажера, согласно изобретению, подвижная платформа выполнена в виде рамной конструкции, которая неподвижно закрепляет поперечные направляющие относительно друг друга.
Сущность заявляемого изобретения выражается в совокупности существенных признаков, достаточных для достижения обеспечиваемого технического результата, выражающегося в расширении функциональности и улучшении рабочих характеристик устройства, удобства использования заявляемого устройства и повышении реалистичности осуществления на нём всенаправленного пешего передвижения с реализацией разнообразных вариаций ходьбы и бега. В заявляемом устройстве при угловом повороте направляющих с ненагруженной площадкой (площадкой, перемещающейся под поднятой ногой) имеется возможность временно сохранять размещение опорной площадки (площадки с опорной ногой пользователя). При использовании заявляемого устройства для передвижения по VR (временное сохранение размещения опорной площадки) позволяет пользователю передвигать ногу, которая совершает шаг в разных направлениях, то есть даёт возможность выбирать место расположения стопы для завершения шага, а также выполнять другие сложные шаговые действия, такие как передвижение боком со скрещиванием ног, и махи ногами в разных направлениях, что значительно улучшает комфорт использования устройства и расширяет его возможности.
Заявленная совокупность существенных признаков находится в прямой причинно-следственной связи с достигаемым результатом. Сравнение заявленного технического решения с прототипом позволило установить соответствие его критерию "новизна", так, как оно неизвестно, из уровня техники. Заявляемое устройство является промышленно применимым, и может быть реализовано существующими техническими средствами. Таким образом, предложенное техническое решение соответствует установленным условиям патентоспособности для изобретений. Других известных технических решений аналогичного назначения с подобными существенными признаками заявителем не обнаружено.
Перечень фигур
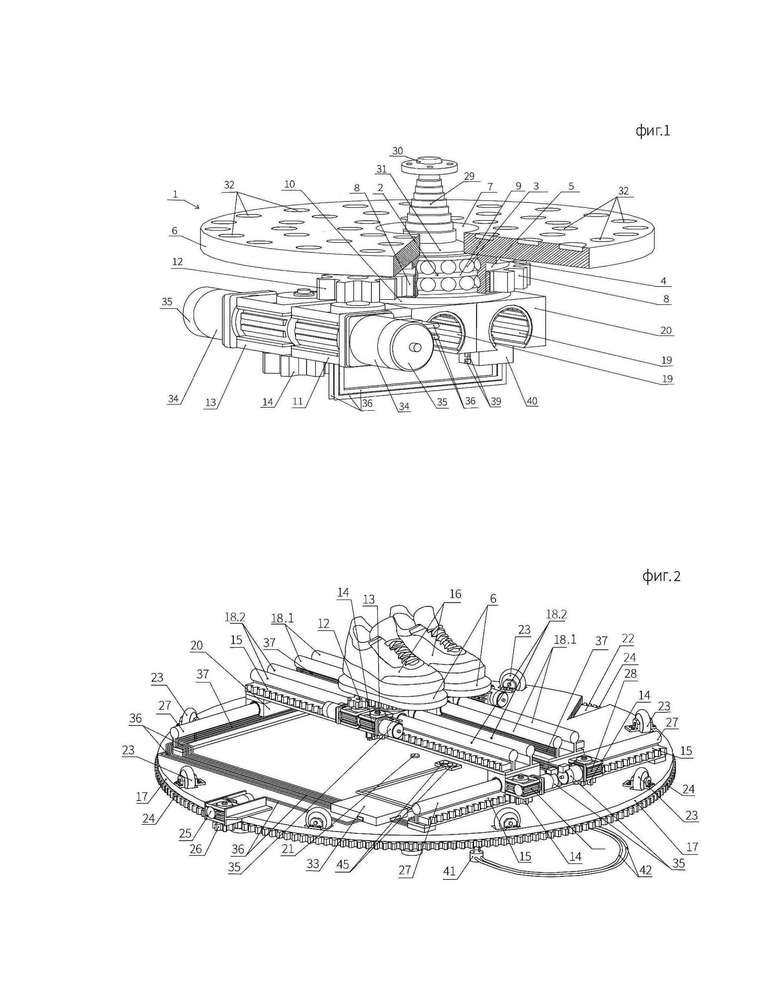
Фиг.1 - общий вид площадки для ног с разрезом её верхней части.
Фиг.2 - общий вид заявляемого устройства.
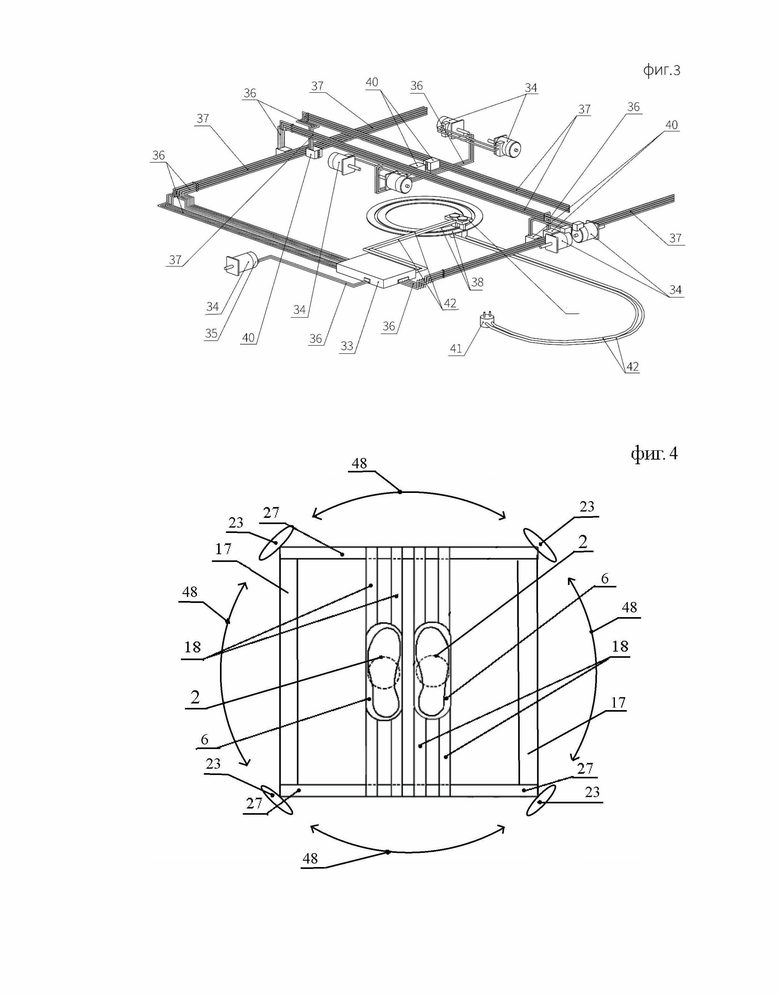
Фиг.3 - общий вид электрической разводки заявляемого устройства.
Фиг.4 - подвижная платформа выполненная в виде рамной конструкции, которая неподвижно закрепляет поперечные направляющие относительно друг к друга.
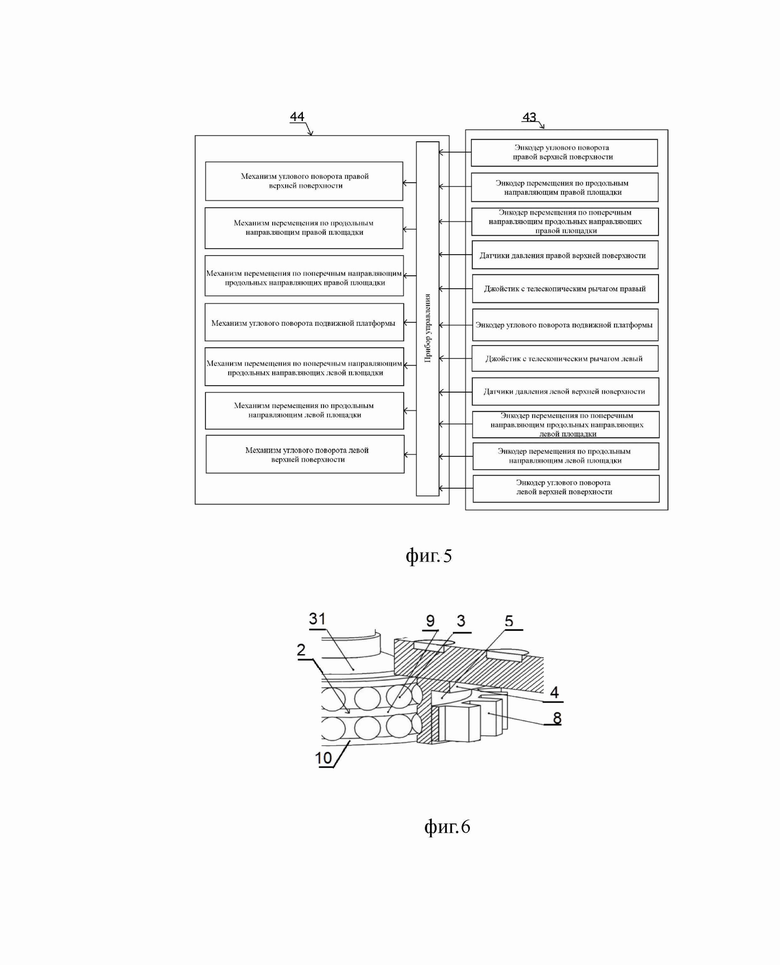
Фиг.5 - блок-схема заявляемого устройства.
Фиг.6 - фрагмент верхней части площадки для ног.
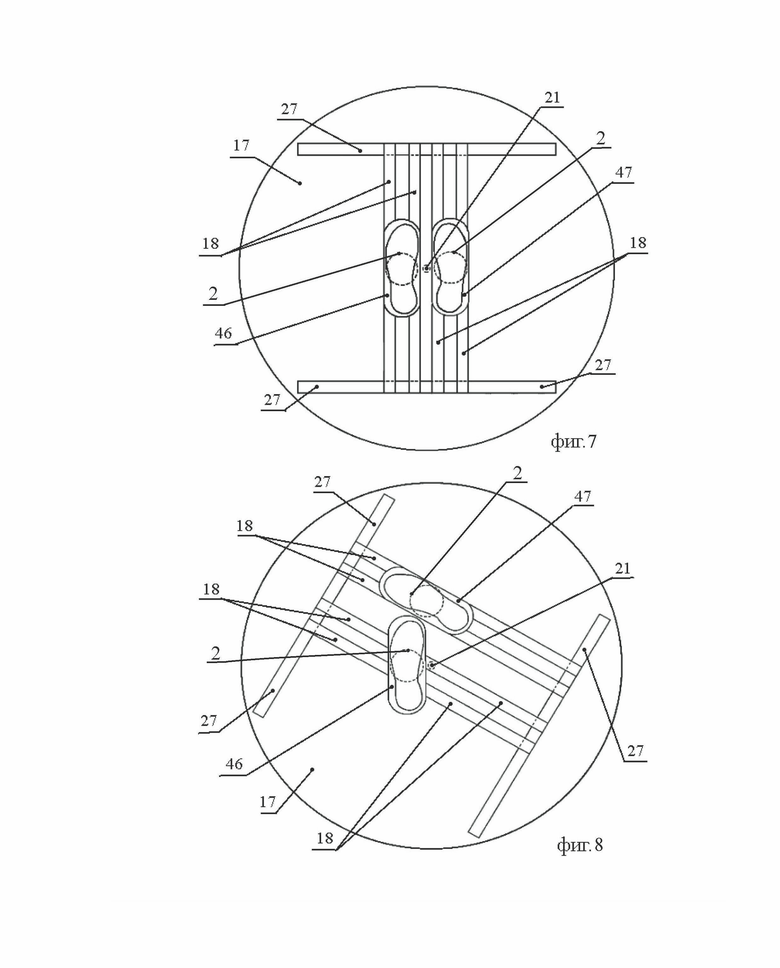
Фиг.7 - пример сохранения опорной площадкой 46 своего размещения во время осуществления начала перекрестного шага и пример расположения поперечных направляющих на подвижной платформе.
Фиг.8 - пример сохранения опорной площадкой 46 своего размещения во время осуществления конца перекрестного шага.
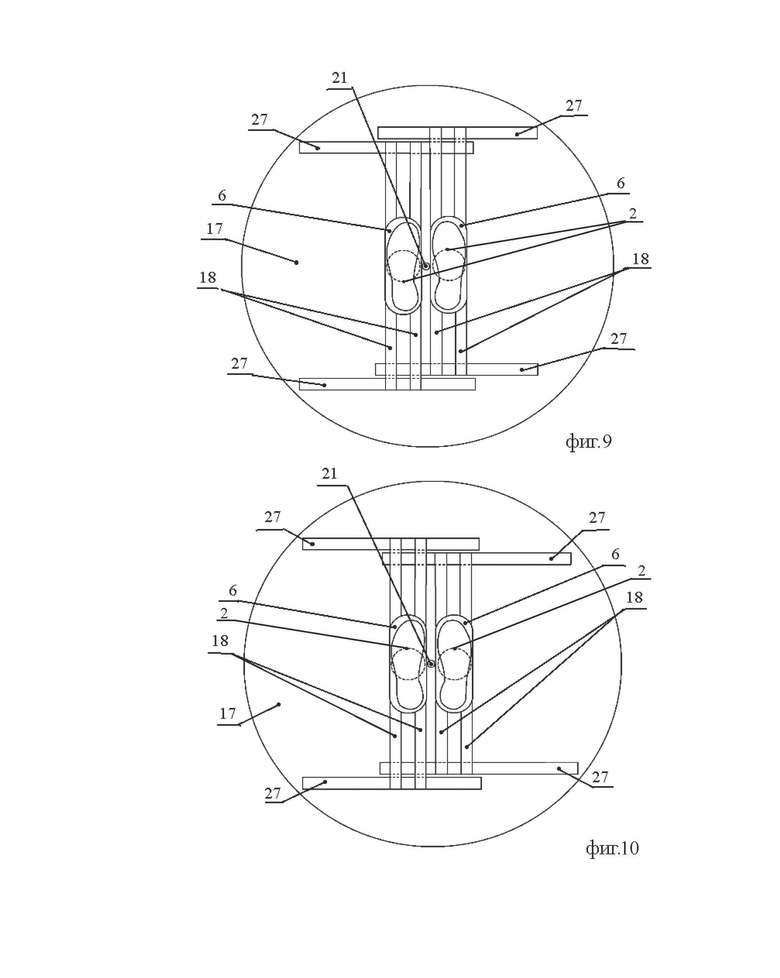
Фиг.9 - пример расположения поперечных направляющих на подвижной платформе.
Фиг.10 - пример расположения поперечных направляющих на подвижной платформе.
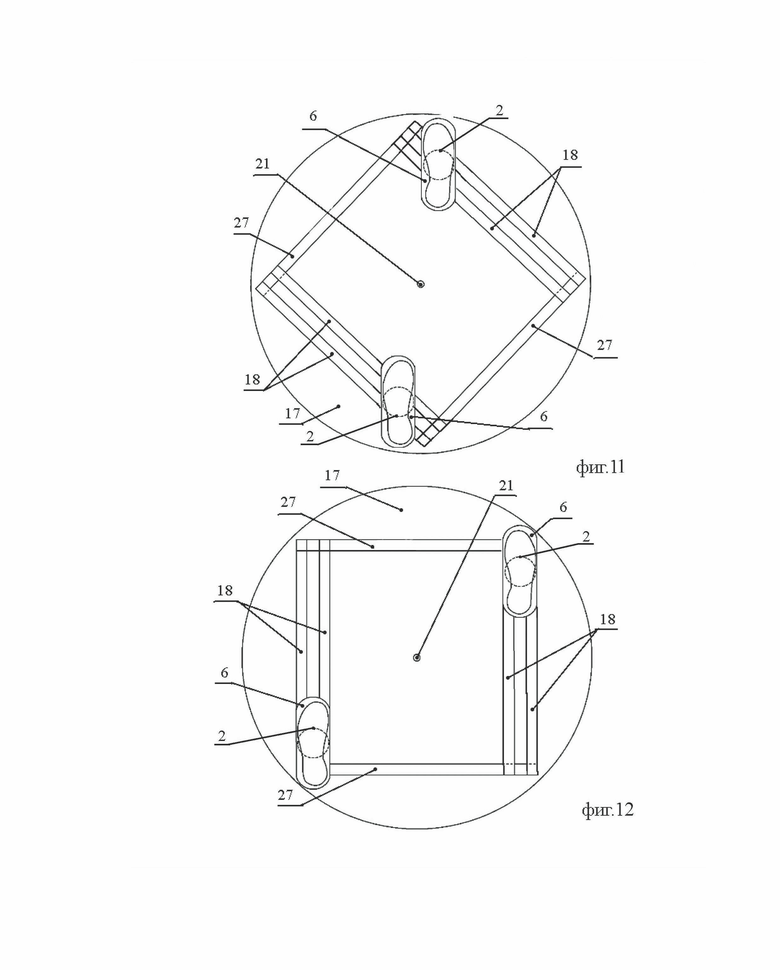
Фиг.11 - первый пример максимально возможного разведения площадок 1 для ног и их верхних поверхностей 6.
Фиг.12 - второй пример максимально возможного разведения площадок 1 для ног и их верхних поверхностей 6.
Перечень позиций:
площадка для ног 1; двухрядного радиально упорный подшипник 2; подшипниковые шарики 3; верхний фланец 4; внешняя обойма 5; верхняя поверхность 6; технологическое отверстие 7; малый зубчатый венец 8; внутренняя обойма 9; нижний фланец 10; червячный редуктор 11 для углового поворота верхней поверхности 6; шестерня 12 для углового поворота верхней поверхности 6; червячный редуктор 13 для продольного перемещения площадки 1 для ног; шестерня 14 вместе с зубчатой рейкой 15 применяются одинаковые для продольного и поперечного перемещения; специальная обувь 16; подвижная платформа 17; продольные направляющие 18; подшипники скольжения 19 и подшипниковый модуль 20 применяются одинаковые для продольного и поперечного перемещения; общий центр 21 углового поворота, расположенный на нижней платформе 22; роликовые колёса 23; большой зубчатый венец 24; червячный редуктор 25 предназначен для углового поворота подвижной платформы 17; шестерня 26 для углового поворота подвижной платформы 17;поперечные направляющие 27; червячный редуктор 28 для поперечного перемещения продольных направляющих 18; телескопический рычаг 29; малое шарнирное соединение 30; большое шарнирное соединение 31; датчик давления 32; прибор управления 33; электродвигатель 34; энкодер 35; провода 36; троллейные шинопроводы 37; плоские медные кольца 38; щетки графитовые 39; щеткодержатели 40; электрическая вилка 41; сетевой провод 42; детекторный блок 43; блок электроприводов 44; токосъёмник 45; опорная площадка 46; ненагруженая площадка 47; траектория углового поворота 48 подвижной платформы 17.
Осуществление изобретения.
В состав заявляемого тренажера (фиг.1, фиг.2) входят две площадки 1 для ног. На фиг.1 показана общий вид площадки 1 для ног с вырезом в её верхней части, для понимания её внутреннего устройства. Каждая площадка разделена двухрядным радиально упорным подшипником 2 (фиг.1) на две части: верхнюю часть - с возможностью углового поворота в обе стороны и нижнюю часть, которая подвижно устанавливается на направляющих 18 и имеет возможность продольного перемещения по направляющими 18.
Верхняя часть площадки для ног включает в себя верхний фланец 4, внешнюю обойму 5, верхнюю поверхность 6, технологическое отверстие 7, малый зубчатый венец 8.
Нижняя часть площадки для ног включает в себя внутреннюю обойму 9, нижний фланец 10, червячный редуктор 11, шестерню 12, червячный редуктор 13, шестерню 14, подшипники скольжения 19, подшипниковый модуль 20, два электродвигателя 34 с расположенными на них энкодерами 35. Для подачи электропитания на электродвигатели 34, которые установлены на нижней части площадки для ног, используются провода 36, щетки графитовые 39 и щеткодержатели 40.
Две части входят в единую конструкцию площадки 1 для ног, но предназначены для выполнения разных перемещений, верхняя часть имеет возможность углового поворота в обе стороны, а нижняя часть продольного перемещения по направляющим 18. Верхняя часть площадки 1 для ног предназначена, чтобы обеспечивать верхней поверхности 6 угловой поворот. Далее по тексту может упоминаться как угловой поворот верхней поверхности 6, так и угловой поворот верхней части площадки 1 для ног, что обозначает одно и то же действие.
Площадки 1 для ног представлены на фиг.1 с круглыми верхними поверхностями 6, а на фиг.2 с овальными верхними поверхностями 6, также они могут иметь прямоугольную форму (прямоугольные верхние поверхности 6 предпочтительнее использовать со скошенными углами). Применение округлой формы необходимо, чтобы уменьшить расстояние между двумя верхними поверхностями 6 при их угловом повороте и перемещении. Каждая площадка 1 оснащена своим механизмом углового поворота верхней поверхности 6 и механизмом перемещения площадки по направляющим 18. Указанные механизмы размещены на подвижных платформах 17 (фиг.2).
Устройства механизмов углового поворота верхних поверхностей 6 и механизмов перемещения по продольным направляющим 18 площадок для ног, а также механизмов перемещения по поперечным направляющим 27 продольных направляющих 18 одинаковы, поэтому их описание далее может идти со ссылкой на фиг.1, фиг.2 без указания, к какой именно площадке относятся упоминаемые элементы. В заявляемом устройстве продольные направляющие 18 и поперечные направляющие 27 могут быть линейными или криволинейными. Поскольку изготовление криволинейных направляющих является дорогим и сложным, то целесообразнее использовать линейные направляющие. В конструкции устройства при использовании криволинейных направляющих применяются такие же детали и элементы, какие применяются и на линейных направляющих, за исключением того, что зубчатые рейки 15 также должны быть изогнуты, как и криволинейные направляющие.
Описание механизма углового поворота верхней поверхности
Для каждой площадки 1 выделены отдельные продольные направляющие 18.1 и 18.2, соответственно, подвижно установленные на поперечных направляющих 27. При помощи верхнего фланца 4, расположенного на внешней обойме 5 двухрядного радиально-упорного подшипника 2 закреплена верхняя поверхность 6, предназначенная для контакта с ногами пользователя (фиг.1). В верхней поверхности 6 выполнено технологическое отверстие 7. На внешней обойме 5 двухрядного радиально-упорного подшипника 2 зафиксирован малый зубчатый венец 8 (фиг.1, фиг.2).
Внутренняя обойма 9 фланцевого двух рядного радиально-упорного подшипника 2 при помощи нижнего фланца 10 закреплена на нижней части площадки 1 для ног. Червячный редуктор 11 для углового поворота верхней поверхности 6 закреплён на нижней части площадки 1, но совершает угловой поворот верхней поверхности 6 при помощи шестерни 12 и электродвигателя 34 с энкодером 35 (фиг.1 и фиг.2).
Механизм углового поворота верхней поверхности 6 может не включать в себя электроприводы, так как при помощи инерции тела пользователя, верхняя поверхность 6 на которую опирается нога пользователя может сохранять своё направление, в то время как подвижная платформа 17 с расположенными на ней продольными и поперечными направляющими совершает угловой поворот.
Описание механизма перемещения по продольным направляющим площадки для ног
Для каждой площадки 1 выделены отдельные продольные направляющие 18.1 и 18.2, соответственно, подвижно установленные на поперечных направляющих 27 закреплённых на подвижной платформе 17 с угловым поворотом в обе стороны.
Перемещение по направляющим 18 каждой из площадок 1 для ног осуществляют два механизма, для каждой площадки предназначен свой механизм, каждый из механизмов содержит: электродвигатель 34 с энкодером 36 и червячным редуктором 13, шестерней 14, которая контактирует с зубчатой рейкой 15, закрепленной на продольных направляющих 18. Ноги пользователя обуваются в специальную обувь 16. На поперечных направляющих 27 установлены направляющие 18 с подшипниками скольжения 19, вставленных в подшипниковых модулях 20. (фиг.2).
Длина продольных направляющих, применяемых в заявляемом устройстве, должна быть (не менее) 1,0 м. Габариты устройства определяются тем, что одна площадка с расположенной на ней ногой, и другая площадка, которая перемещается под поднятой ногой, должны разойтись на максимально возможную длину шага, для этого длина направляющих может быть увеличена, но в этом случаи габариты устройства также увеличатся.
Описание механизма перемещения по поперечным направляющим продольных направляющих
На продольных направляющих 18.1 и 18.2 , соответственно, на каждой торцевой стороне, установлены подшипниковые модули 20 с подшипниками скольжения 19, они подвижно устанавливаются на поперечных направляющих 27, которые в свою очередь закреплены на подвижной платформе 17. Поперечные перемещения продольных направляющих 18.1 и 18.2 осуществляются двумя электродвигателями 34 с энкодерами 35 и червячными редукторами 28 с шестернями 14, которые взаимодействуют с зубчатой рейкой 15, закреплённой на поперечных направляющих 27. В заявляемом устройстве поперечные направляющие 27 могут иметь такую же длину, как продольные направляющие 18 (фиг.7) или могут быть короткими (фиг.9 и фиг.10), но располагаться на подвижной платформе 17 они должны так, чтобы продольные направляющие 18 могли проходить над общим центром 21 углового поворота (фиг.7, фиг.9 и фиг.10). Когда продольные направляющие 18 могут перемещаться над общим центром 21, тогда верхняя поверхность 6 опорной площадки 46, т.е. площадки с расположенной на ней опорной ногой пользователя, может сохранять своё размещение на одном месте при любом возможном угловом повороте подвижной платформы 17, и пользователь может осуществлять на заявляемом устройстве любые шаговые передвижения.
Описание механизма углового поворота подвижной платформы
Направляющие 18.1 и 18.2 , подвижно установлены на поперечных направляющих 27, которые закреплены на подвижной платформе 17 с угловым поворотом в обе стороны.
Угловой поворот подвижной платформы 17 происходит при помощи электродвигателя 34 с червячным редуктором 25, оборудованным шестерней 26, вокруг общего центра 21 углового поворота, смонтированного на нижней платформе 22, на которой установлена подвижная платформа 17 с роликовыми колесами 23. При помощи большого зубчатого венца 24, червячного редуктора 25 с шестерней 26 производится угловой поворот подвижной платформы 17.
Применение в заявляемом устройстве нижней платформы 22 вызвано тем, что на неё можно установить защитный экран, ограждающий продольные направляющие 27 по диаметру траектории их углового поворота. Общий центр 21 углового поворота может использоваться без нижней платформы 22, для этого общий центр 21 располагают на любой ровной поверхности и подвижная платформа 17, оборудованная по крайней мере тремя роликовыми колёсами 23, установленными по кругу на одинаковом расстоянии друг от друга, может совершать угловой поворот в обе стороны вокруг общего центра 21. Расположение на подвижной платформе 17 по крайней мере трех роликовых колёс 23, установленных по кругу на одинаковом расстоянии, позволяет также не применять физически существующий общий центр 21, так как данное расположение роликовых колёс 23 даёт возможность осуществлять угловой поворот подвижной платформы 17, по траектории углового поворота 48 которую задают роликовые колеса 23 (фиг.4). В рамках заявляемого устройства устройство может быть реализовано без использования электроприводов. Осуществляется это следующим образом: продольные направляющие 18 и поперечные направляющие 27, а также все элементы устройства изготавливаются из легких материалов, таких как алюминий и композитные пластики, позволяющие максимально облегчить конструкцию. Для большего облегчения заявляемого устройства, подвижная платформа 17 может быть выполнена в виде рамной конструкции, которая неподвижно закрепляет поперечные направляющие 27 относительно друг друга (фиг.4). Перемещение опорной площадки в противоположную сторону от направления движения пользователя происходит посредством силы, возникающей во время отталкивания опорной ноги от площадки, а перемещение ненагруженной площадки вслед за передвигающейся ногой происходит при помощи телескопического рычага 29 без большого шарнирного соединения 31, в данном варианте телескопический рычаг 29 не имеет возможности наклонятся, но может выдвигаться вверх.
Поскольку продольные направляющие 18 по которым перемещаются площадки для ног подвижно установлены на поперечных направляющих 27 и имеют возможность перемещения над центром углового поворота, то площадка с опорной ногой может сохранять своё положение, независимо от того насколько и сколько раз подвижная платформа изменит угловой поворот во время осуществления пользователем одного шага.
Передвижение ног пользователя отслеживают при помощи двух телескопических рычагов 29, каждый из этих рычагов при помощи малого шарнирного соединениям 30 закреплен на подошве специальной обуви 16, а большим шарнирным соединением 31 установлен во внутренней обойме 9. За отслеживание положения стоп ног пользователя и степень их опоры на верхних поверхностях 6 отвечают датчики давления 32 (фиг.1).
Управление работой заявляемого устройства производит прибор управления 33, соединённый с электродвигателями 34 проводами 35. В качестве прибора управления 33 может выступать программируемый микроконтроллер с драйверами электродвигателей 34 и схемой питания, такое управление применяется на ЧПУ станках. На фигурах электродвигатели обозначены одной цифрой 34, поскольку электродвигатели могут быть применены одинаковые и установлены на червячные редукторы 11, 13, 25, 28 с разными передаточными числами. Энкодеры 36 размещены на валах электродвигателей 34 и позволяют отслеживать перемещение подвижных частей на заявляемом устройстве. На подвижные части, перемещающиеся по продольным направляющим 18 и поперечным направляющим 27, управляющий сигнал передаётся при помощи троллейных шинопроводов 37, щеток графитовых 39 и щеткодержателей 40. Для подачи электричества на прибор управления 33 используется электрическая вилка 41, сетевой провод 42 и плоские медные кольца 38 с токосъемниками 45 (фиг.2 и фиг.3).
Таким образом, заявляемое устройство состоит из двух основных рабочих блоков, взаимодействующих друг с другом. Первый - это детекторный блок 43, в который входят все отслеживающие приспособления заявляемого устройства, такие как энкодеры 35, датчики давления 32 и телескопические рычаги 29 с джойстиками (не показаны), могут применяться и другие отслеживающие приспособления. Вторым рабочим блоком заявляемого устройств является блок электроприводов 44, включающий в себя прибор управления 33, и все электромеханические компоненты, к которым относятся электродвигатели 34, червячные редукторы 11, 13, 25, 28, шестерни 12, 14, 26, малый зубчатый венец 8, зубчатые рейки 15, продольные направляющие 18 и поперечные направляющие 27, роликовые колёса 23, большой зубчатый венец 24. Могут применяться и другие электромеханические компоненты, упомянутые в тексте описания. Электромеханические компоненты объединены в механизмы, которые обеспечивают работу заявляемого тренажера (фиг.5).
Ниже также описан более подробно механизм управления работой заявляемого устройства. Детекторный блок 43 отвечает за получение информации о расположении на верхних поверхностях 6 и передвижении в пространстве ног пользователя, а также отслеживания размещение верхних поверхностей 6 и перемещение площадок 1 для ног на заявляемом устройстве. Расположение ног на верхних поверхностях 6 определяется при помощи датчиков давления 32, регистрирующих расположение и степень отрыва стопы пользователя от верхней поверхности 6. Датчики давления 32 на каждой площадке размещаются по всей верхней поверхности 6, соединяются при помощи интерфейса i2c и подключаются к микроконтроллеру с автономным электропитанием ESP32 , в который интегрирован контроллер радиосвязи Wi-Fi, посредством него сигналы передаются на прибор управления 33. В отслеживании передвижения ног пользователя участвуют два телескопических рычага 29, которые при помощи джойстиков (не указаны) передают сигналы в прибор управления 33. Отслеживание перемещения площадок 1 для ног, продольных направляющих 18, а также угловые повороты верхних поверхностей 6 и подвижной платформы 17, происходит при помощи энкодеров 35, установленных на электродвигателях 34. Сигналы от энкодеров 35, поступают в прибор управления 33, который при помощи алгоритма определяет, как и где на тренажере размещены верхние поверхности 6.
Блок электроприводов 44 включает в себя прибор управления 33, и электромеханические компоненты, такие как электродвигатели 34, червячные редукторы с шестернями, зубчатые рейки с продольными и поперечными направляющими. Электромеханические компоненты в заявляемом устройстве могут быть применены другого вида, такие как зубчатые ремни, зубчатые шкивы, цилиндрические или планетарные редуктора, разнообразные направляющие, используемые в ЧПУ станках. Выбор электромеханических компонентов обусловлен тем, что именно надо улучшить в заявляемом устройстве, например, уменьшить бесшумность хода подвижных частей, упростить конструкцию или удешевить производство. Прибор управления 33 обрабатывает сигналы, поступающие от детекторного блока 43, и в соответствии с заложенным алгоритмом вырабатывает команды для управления электродвигателями 34. В роли прибора управления 33 может выступать программируемый микроконтроллер Arduino или ESP32, в который интегрирован контроллер радиосвязи Wi-Fi. Микроконтроллер дополняется драйверами электродвигателей 34 и схемой питания, такое управление применяется на ЧПУ станках. Выработка команд в приборе управления 33 происходит при помощи алгоритма, который описывается программным кодом и устанавливается в микроконтроллер. В прибор управления 33 могут входить два потока информации, на основании которой он вырабатывает управляющие сигналы, один поток поступает от детекторного блока 43, второй от компьютера моделирующего виртуальную реальность. Ввиду того, что компьютер, на котором эмулируется виртуальная реальность, является отдельным устройством и работа заявляемого устройства может происходить как вместе с ним, так и раздельно, поэтому как часть заявляемого устройства компьютер не рассматривается, а упоминается, что в приборе управления 33 имеется канал для получения сигналов с компьютера или игровой приставки.
Сигналы с компьютера необходимы в заявляемом устройстве, если применяются подъемные механизмы для подъема/опускания и изменения угла наклона верхней поверхности 6. Данные механизмы необходимы для эмуляции спуска и подъема по ступеням, а также передвижения по пересеченной местности. Механизмы подъема/опускания и изменения угла наклона верхней поверхности 6 могут быть реализованы при помощи двух или трёх, или четырёх ножничных электроподъемников (не показаны), их количество зависит от формы верхней поверхности 6: для овальной верхней поверхности можно использовать два, а для круглой и прямоугольной три или четыре. Для каждой площадки для ног 1 используются две верхние поверхности 6 одинаковой формы и размера, устанавливаются они одна поверх другой, между ними закрепляются ножничные электроподъемники.
В блок электроприводов 44 также входят электродвигатели 34 с червячными редукторами 11,13,25, 28 и шестернями 12, 14, 26, осуществляющими угловой поворот верхней поверхности 6 и перемещения по продольным направляющим 18 площадок для ног 1, а также перемещения по поперечным направляющим 27 продольных направляющих 18. Для перемещения продольных направляющих 18 по поперечным направляющим 27 в блоке электроприводов 44 применяются два электродвигателя 34 с червячными редукторами 13, оборудованные шестернями 14, для каждой площадки для ног выделены свои направляющие 18 с размещёнными на них зубчатыми рейками 15, а для углового поворота подвижной платформы 17 используется электродвигатель 34 с червячным редуктором 25, оборудованного шестерней 26, а также большим зубчатым венцом 24 закреплённым на подвижной платформе 17.
Применение червячных редукторов обусловлено их свойством самоторможения, которое необходимо, чтобы площадки 1 для ног и их верхние поверхности 6 не смещались под воздействием ног пользователя, когда на электродвигатели не подаётся электричество. Применение червячных редукторов с самоторможением позволяет упростить конструкцию заявляемого устройства и отказаться от других тормозных систем. Все электродвигатели 34 в заявляемом устройстве должны обладать реверсом и возможностью изменения скорости вращения, это могут быть асинхронные электродвигатели, шаговые двигателей или серводвигатели.
На верхней опорной поверхности 6 имеется технологическое отверстие 7, которое необходимо для осуществления взаимосвязи ног пользователя с приспособлением, отслеживающим передвижение переносной ноги. Указанное приспособление помогает точно подводить одну из площадок под поднятую ногу и не даёт пользователю сбиться с ритма ходьбы или бега. Для уменьшения времени отклика устройства и упрощения системы управления площадками 1 для ног предпочтительно использовать телескопический рычаг 29, состоящий из складываемых друг в друга полых цилиндров, верхний и нижний цилиндр с одной из своих сторон имеют дно, внутри телескопического рычага 29 размещается пружина сжатия (не показана), компенсирующая вес специальной обуви 16 и самого телескопического рычага 29, Благодаря данной пружине пользователь не ощущает вес телескопического рычага 29. Цилиндры предпочтительно изготавливать из стали, чтобы они выдерживали большую нагрузку при воздействии на них ног пользователя. Когда практически весь вес тела переносится на телескопический рычаг 29, он должен складываться, но не деформироваться. В телескопическом рычаге 29 нижний цилиндр располагается над джойстиком (не показан). Рычаг джойстика вставляется со свободным ходом в отверстие, находящееся на дне нижнего цилиндра. С двух сторон телескопического рычага 29 устанавливаются два шарнирных соединения, одно - малое шарнирное соединение 30 закрепляется на специальной обуви 16, второе- большое шарнирное соединение 31 устанавливается во внутреннею обойму 9 двухрядного радиально упорного подшипника 2. Отверстие на дне нижнего цилиндра телескопического рычага 29 должно быть шире, по крайней мере, на два миллиметра, чем диаметр рычага джойстика. Длина телескопического рычага 29 для каждой площадки 1 для ног, в раздвинутом состоянии должна быть в среднем около 0,80 м. Эта необходимая длина выведена при помощи замера расстояния между верхней поверхностью 6 и точкой крепления малого шарнирного соединения на специальной обуви 16 при максимальном поднятии ноги пользователя.
Джойстик с телескопическим рычагом 29 производит отслеживание передвижения ноги пользователя, которая совершает шаг (переносной ноги), однако, также могут применяться и другие существующие технические средства.
Приспособление, отслеживающее передвижение ноги, совершающей шаг, может контактировать со специальной обувью 16 или может быть бесконтактным.
Бесконтактные системы могут состоять из четырёх видео камер, расставленных по углам помещения для определения местоположения объекта с расположенными на нём светодиодами. Также системы для бесконтактного отслеживания движения могут состоять из ультразвуковых датчиков слежения. Также для отслеживания могут использоваться и гироскопы с акселерометрами, расположенными на ногах пользователя. Однако, на данный момент этих средства являются дорогими, а также дают значительную задержку в работе управляемого ими устройства, поэтому использование джойстика с телескопическим рычагом 29 является оптимальным вариантом для применения в устройстве с двумя площадками 1 для ног имеющими верхние опорные поверхности 6, где каждая площадка предназначена для своей, то есть левой и правой ноги. Главным преимуществом использования джойстика с телескопическим рычагом 29 является возможность возвращения переносной ноги пользователя в центр верхней поверхности 6.
Работа устройства
Для начала работы с устройством ноги пользователя обуваются в специальную обувь 16. Пользователь встает каждой ногой на свою верхнюю поверхность 6.
Заявляемое устройство позволяет совершать на нём всенаправленные шаговые передвижения за счет продольного и поперечного перемещения двух площадок 1 для ног в пределах подвижной платформы 17 с возможностью углового поворота в обе стороны. Для левой и правой ноги пользователя предназначена своя площадка 1 для ног со своей верхней поверхностью 6. Площадки для ног 1 перемещаются каждые по своим продольным направляющим 18, которые подвижно установлены на поперечных направляющих 27, и те в свою очередь закреплены на подвижной платформе 17.
При ходьбе человек последовательно опирается то на одну, то на другую ногу, эта нога называется опорной. Площадка 1 для ног с расположенной на ней опорной ногой по тексту называется опорной площадкой 46. Другая нога в этот момент выносится вперед, это переносная нога, а площадка, перемещающаяся под ней, по тексту называется ненагруженной площадкой 47. Угловой поворот верхней поверхности 6, на которую опирается нога пользователя, должен происходить в противоположном направлении относительно углового поворота подвижной платформы 17. Небольшая разница в противоположном угловом повороте верхней поверхности 6 опорной площадки 46, относительно углового поворота подвижной платформы 17, не ощущается пользователем и поэтому негативное влияние на работу устройства не оказывает. На заявляемом тренажере угловой поворот подвижной платформы 17 необходим, когда пользователь изменяет направление своего движения. Передвигаться прямо вперёд или назад, а также совершать приставной шаг в сторону на тренажере можно без углового поворота подвижной платформы.
Необходимое условие в работе заявляемого устройства: когда обе ноги пользователя находятся на площадках, поворота и движения площадок 1 для ног не происходит. Процесс передвижения площадок 1 для ног происходит циклично, они по очереди становятся одна опорной, на верхней поверхности 6 находится нога пользователя, другая является не нагруженной, нога пользователя находится в отрыве и совершает шаг, т.е. переносная нога, а ненагруженная площадка 47, т.е. площадка с переносной ногой, перемещается под ней, и её верхняя поверхность 6 всегда находится под стопой ноги пользователя. Когда на ненагруженную площадку 47, т.е. площадку с переносной ногой, опускается нога пользователя, тогда эта площадка становится опорной и в данный цикл шага может оставаться на одном месте, т.е. происходит сохранение опорной площадкой 46 своего размещения или опорная площадка 46 отводится в противоположную сторону от направления движения пользователя.
При работе заявляемого устройства, когда пользователь осуществляет пешее передвижение, площадка, на которую опирается нога пользователя, может оставаться на одном месте, временно сохраняя своё размещение, или перемещаться в противоположную сторону от направления движения пользователя. Сохранять своё размещение одна из площадок 1 должна, чтобы значительно уменьшить негативное воздействие на пользователя сил, возникающих при боковых смещениях опорной площадки 46, т.е. площадки, на которую опирается нога пользователя. Во время шага пользователь опирается на одну из ног, поэтому при старте и торможении опорной площадки 46, т.е. площадки, на которую опирается нога пользователя, возникают силы, негативно воздействующие на пользователя, которые могут вывести его из равновесия и спровоцировать падение. Также негативное воздействие возникает при боковых смещение опорной площадки 46 относительно направления движения пользователя, и ещё сильнее при нескольких противоположных боковых смещениях опорной площадки 46, происходящих во время одного шага. Боковые смещения опорной площадки 46, относительно направления движения пользователя возникают при угловом повороте подвижной платформы 17. Эти боковые смещения могут вывести пользователя из равновесия и спровоцировать его падение. Для того чтобы пользователь мог осуществлять длинные шаги, которые при этом вписываются в габариты устройства, и для сохранения небольших габаритных размеров заявляемого устройства, в его работе необходимо совмещать сохранение размещения опорной площадки 46, т.е. площадки с опорной ногой и последующие её отведение в противоположную сторону от направления движения пользователя. Чтобы переход происходил плавно, в заявляемом устройстве применяется приспособление для плавного старта и торможения опорной площадки 1, т.е. площадки с опорной ногой. Возможность совмещать в одном цикле шага варианты перемещения с сохранением размещения опорной площадки 46, т.е. площадки с опорной ногой, и вариант с отведением опорной площадки 46 в противоположную сторону от направления движения пользователя вытекает из закономерности, возникающей при ходьбе и беге человека. Заключается она в следующем: при осуществлении шага, когда переносная нога отводится вперёд больше, чем на 0,30 м, центр массы смещается и происходит подъём опорной ноги на носок, и в этом цикле шага у пользователя не получится передвигать разнонаправленно переносную ногу. Поэтому, когда опорная нога приподнимается на носок, в этот момент опорная площадка, т.е. площадка с опорной ногой, может начать плавно перемещаться в противоположную сторону от направления движения пользователя и закончить своё перемещение, когда обе ноги пользователя будут находиться на своих площадках. На устройствах, где площадки для ног находятся на общей для них подвижной платформе с угловым поворотом (как на устройствах, приведённых в патенте-прототипе RU 109979 U1), в момент осуществления пользователем одного шага, когда он заносит ногу, намереваясь резко изменить направление своего движения в сторону, но передумав, возвращает её назад в исходное положение, или при совершении пользователем маха ногой в бок и возврат её назад, в этих шаговых ситуациях на устройствах, приведённых в прототипе, произойдут два противоположных боковых смещения опорной площадки, т.е. площадки с опорной ногой относительно направления движения пользователя, так как во время цикла шага будут совершены два разнонаправленных угловых поворотах подвижной платформы, поскольку ненагруженная площадка, т.е. площадка с переносной ногой, всегда должна находится под ступней ноги пользователя, совершающей шаг.
Во время работы заявляемого тренажера перемещение площадок 1 для ног по продольным направляющим 18 совмещаются с их перемещением по поперечным направляющим, закреплённым на подвижной платформе 17, с угловым поворотом в обе стороны, благодаря чему площадка 1, перемещаемая под поднятой, переносной ногой, может подводиться в любую точку пространства, предназначенного для ходьбы, и может максимально разводиться без поворота подвижной платформы 17 (фиг.12). Или при совершении пользователем прыжка или длинного шага вперёд или назад, площадки для ног способны при помощи углового поворота подвижной платформы 17 увеличить расстояние своего максимального разведения вперёд (фиг.11). На фиг.11 и фиг.12 показано максимально возможное разведение площадок 1 для ног и их верхних поверхностей 6 в статике, поэтому площадки для ног не обозначены как опорная и ненагруженная.
Заявляемый тренажер предоставляет пользователю возможность совершать резкие повороты со скрещиванием ног, не ощущая на себе негативное воздействия сил возникающих при боковых смещении опорной площадки, т.е. площадки с опорной ногой, а также при её резком старте и торможении. Для двух площадок для ног выделены свои продольные направляющие 18, подвижно установленные на поперечных направляющих 27, при этом продольные направляющие 18 имеют возможность перемещаться над общим центром 21 углового поворота подвижной платформы 17 и поэтому опорная площадка 46 может сохранять своё размещение, тогда как ненагруженная площадка 47, т.е. площадка с переносной ногой, перемещается под стопой ноги пользователя, совершающей перекрестный шаг. На фиг.7 и фиг.8 показан пример сохранения опорной площадкой 46 своего размещения во время осуществления перекрестного шага, на этих фигурах также видно как продольные направляющие 18 проходят над общим центром 21 углового поворота. На этих двух фигурах показано перемещение площадок 1 для ног в движение поэтому верхние поверхности 6 площадок обозначаются как опорная площадка 46 и ненагруженая площадка 47, на фиг.6 показано начало перекрестного шага, а на фиг.7 его завершение. Также в работе заявляемого устройства участвует приспособление для плавного старта и торможения опорной площадки, т.е. площадки с опорной ногой, которое значительно улучшает комфорт использования устройства.
В заявляемом устройстве верхняя поверхность 6 опорной площадки 46 (площадки с опорной ногой) должна иметь возможность углового поворота в противоположном направлении от углового поворота подвижной платформы 17. Противоположный угловой поворот верхних поверхностей 6 опорной площадки должен быть возможен в обе стороны на необходимый угол поворота.
Передвижение ног пользователя отслеживают при помощи двух телескопических рычагов 29, каждый из этих рычагов при помощи малого шарнирного соединениям 30 закреплен на подошве специальной обуви 16, а большим шарнирным соединением 31 установлен во внутренней обойме 9. За отслеживание положения стоп ног пользователя и степень их опоры на верхних поверхностях 6 отвечают датчики давления 32. Управление работой заявляемого устройства производит прибор управления 33, соединённый с электродвигателями 34 проводами 35. Энкодеры 35, размещенные на валах электродвигателей 34, позволяют отслеживать перемещение подвижных частей на заявляемом устройстве. На подвижные части с продольным и поперечным перемещением, управляющий сигнал передаётся при помощи троллейных шинопроводов 37, щеток графитовых 39 и щеткодержателей 40. Для подачи электричества на прибор управления 33 используется электрическая вилка 41, сетевой провод 42 и плоскими медными кольцами 38 с токосъемниками 45.
Поскольку для каждой из площадок для ног выделены свои продольные направляющие 18.1 и 18.2, соответственно, которые имеют возможность перемещаться по поперечным направляющим над центром 21 углового поворота подвижной платформы 17, поэтому площадка с опорной ногой, т.е. опорная площадка 46 может сохранять своё положение, тогда как ненагруженная площадка 47, т.е. площадка с переносной ногой перемещается под стопой ноги пользователя, совершающей перекрёстный шаг (фиг.7 и фиг.8). На этих двух фигурах показано перемещение площадок 1 для ног в движение поэтому верхние поверхности 6 площадок обозначаются как опорная площадка 46 и ненагруженная площадка 47, на фиг.7 показано начало перекрестного шага, а на фиг.8 его завершение.
В работе заявляемого устройства должно применяться приспособление для плавного старта и торможения опорной площадки, т.е. площадки с опорной ногой, в котором при каждом цикле одиночного шага значение имеет плавное перемещение только опорной площадки 46, т.е. площадки с опорной ногой, перемещение ненагруженной площадки 47, т.е. площадки с переносной ногой может происходить с любым ускорением, и резкой остановкой, главное, чтобы она всегда находилась под стопой ноги пользователя, совершающей шаг. Приспособление плавного старта и торможения опорной площадки предназначено для уменьшения негативного воздействия на пользователя сил, возникающих при резком старте и торможении.
Площадка с опорной ногой (опорная площадка 46) в заявляемом устройстве должна периодически перемещаться в противоположную сторону от направления движения пользователя, а также плавно начинать своё перемещение и также плавно осуществлять торможение с постепенной остановкой. Перемещение опорной площадки 46 в противоположную сторону относительно направления движения пользователя происходит благодаря согласованной работе продольного и поперечного перемещения опорной площадки 46, а также углового поворота подвижной платформы 17. В приспособлении для плавного старта и торможения должны учитываться скорость и время углового поворота подвижной платформы 17 совместно со скоростью и временем перемещения опорной площадки 46 по продольным и поперечным направляющим. В электротехнике применяется плавный старт и торможение электрооборудования для его защиты, а в приспособлении для плавного старта и торможения опорной площадки 46, т.е. площадки с опорной ногой задаётся такая скорость и временной промежуток старта и торможения, при котором пользователь, опирающийся на одну ногу, не ощущает колебания при торможении и остановке опорной площадки 46. Опорная площадка 46, т.е. площадка с опорной ногой должна плавно стартовать, постепенно и равномерно набирая скорость, и также плавно останавливаться. Когда нога, совершающая шаг, т.е. переносная нога соприкасается с верхней поверхностью 6, и обе ноги находятся на площадках 1, должна произойти полная остановка работы заявляемого устройства. Приспособление для плавного старта и торможения опорной площадки, т.е. площадки с опорной ногой 46 может включать в себя аналоговое или цифровое приспособление, в котором заложены команды для управления электродвигателями, задействованными в перемещении опорной площадки. Команды управления для плавного старта и торможения опорной площадки 46 могут быть также включены в алгоритм, управляющий заявляемым устройством. Команды управления обеспечивают плавный старт и плавное торможение опорной площадки 46, т.е. площадки с опорной ногой, достаточное, для того чтобы убрать негативное воздействие на пользователя, возникающее при резком старте и торможении. Опорная площадка 46 должна плавно набирать скорость при старте и плавно останавливаться при торможении.
Начинается работа приспособления для плавного старта и торможения, когда на датчики давления 32, находящиеся на ненагруженной площадке 47, т.е. площадке с переносной ногой, отсутствует нажатие, а заканчивается при завершении цикла шага во время, когда обе ноги находятся на площадках 1, и на датчики давления 32 ненагруженной площадки 47, т.е. площадка с переносной ногой произошло нажатие. Скорость, а также время старта и торможения опорной площадки 46, т.е. площадки с опорной ногой, для разных шаговых ситуаций возможно задавать постоянной. Осуществляется это при помощи аналогового или цифрового приспособления, в котором задаётся усреднённые скорость и время, применяемые при плавном старте и торможении опорной площадки 46. Время и скорость задаются такими, чтобы пользователь не ощущал на себе колебаний от старта и торможения опорной площадки 46. Также приспособление плавного старта и торможения, снабжённое вычислительными средствами, может учитывать в алгоритме возможность более продолжительного старта и торможения опорной площадки или, наоборот, сокращать их в зависимости от возникающей шаговой ситуации. Это позволяет значительно уменьшить негативное воздействие на пользователя сил, возникающих при резком старте и торможении опорной площадки 46.
Приспособление для плавного старта и торможения опорной площадки даст возможность пользователю в случае нескольких стартов и торможении опорной площадки 46 в цикл шага не ощущать дискомфорта, который возникнет в одной из возможных шаговых действий, к примеру при подведении сзади расположенной ноги к опорной и последующему её передвижению вперёд и возврату в позицию, когда ноги разместятся на площадках вместе или будут раздвинуты на ширину плеч. Передвигаясь на заявляемом устройстве, пользователь имеет возможность осуществлять сложные шаговые действия, происходит это при помощи приспособления для плавного старта и торможения опорной площадки, а также возможности сохранения опорной площадкой 46 своего размещения.
Приспособление плавного старта и торможения опорной площадки не предназначено специально защищать электродвигатели и редукторы от повреждения, а должно задавать скорость и время при старте и торможении, которые позволяют пользователю сохранять равновесие своего тела при опоре на одну из ног.
Промышленная применимость
Заявляемое устройство отличает один важный и существенный признак, отличающий его от всех известных аналогов и прототипа, заключается он в том, что в тренажере на подвижной платформе 17 закреплены поперечные направляющие на которых подвижно установлены продольные направляющие с площадками 1 для ног имеющие возможность перемещения над центром углового поворота подвижной платформы; данный признак позволяет сохранять размещение опорной площадки 46 с её верхней поверхностью 6 на одном месте и избежать бокового смещения опорной площадки 46 (площадки с опорной ногой) относительно направления движения пользователя в то время, когда ненагруженная площадка 47 перемещается под переносной ногой, совершающей разнообразные шаговые передвижения. Другие отличительные признаки расширяют возможности заявляемого устройства и улучшают комфорт его использования.
Заявляемое устройство может быть реализовано при помощи приспособлений, приборов и механизмов, описанных в патенте, джойстики, энкодеры 35 и электромеханические компоненты, применяемые в механизмах заявляемого устройства, являются общедоступными и используются в производстве ЧПУ станков.
В заявляемом устройстве имеется возможность использовать не только круглые верхние поверхности 6 площадок 1 для ног, но обе верхние поверхности 6 могут быть или овальной формы, или прямоугольные, или иметь прямоугольную форму со скошенными углами. Если в заявляемом устройстве используется овальные или прямоугольные площадки для ног, то возникает необходимость заменить датчики давления на лазерные модули VL53L0X - это миниатюрный лазерный дальномер, который обеспечивает точное измерение расстояния до 2000 мм с разрешением 1 мм (см. https://www.st.com/resource/en/datasheet/vl53l0x.pdf. Опубл. декабрь 2022 г.). Данные модули обеспечат определение положения стопы переносной ноги и могут взять на себя функции, исполняемые датчиками давления. Установка и подключение модулей производится по такой же схеме, как описана установка и подключение датчиков давления.
Таким образом, применение в заявляемом устройстве этих отличительных признаков обеспечивает расширение функциональных возможностей устройства, делает его использование более комфортным и безопасным.
Источники информации
1. Патент США №6152854. Всенаправленная беговая дорожка «Omni directional treadmill - ODT» (заявка 09/255162; МПК A63B 24/00. Опубл. 22.02.1999 г.).
2. Патент США №6102832. Аппарат для моделирования виртуальной (заявка 08.907025; МПК A63B 24/00. Опубл. 06.08.1997 г.).
3. Патент на полезную модель №109979. Многофункциональный спортивный тренажер (заявка 2011134276/12; МПК A63B 21/00. Опубл. 10.11.2011 г.) - наиболее близкий аналог.
Заявляемое изобретение относится к тренировочным устройствам. Тренажер для симуляции всенаправленного пешего передвижения пользователя содержит рабочее место пользователя, выполненное в виде подвижной платформы с возможностью углового поворота в обе стороны с двумя подвижными площадками для ног пользователя, установленными с возможностью перемещения по выделенным для них продольным направляющим, и, согласно изобретению, на подвижной платформе закреплены поперечные направляющие, на которых подвижно установлены продольные направляющие, имеющие возможность перемещения над центром углового поворота подвижной платформы. Задачей, на решение которой направлено заявляемое изобретение, является расширение функциональности и улучшение рабочих характеристик устройства, а также повышение удобства и безопасности его использования и повышение реалистичности осуществления на нём всенаправленного пешего передвижения с реализацией разнообразных вариаций ходьбы и бега. 9 з.п. ф-лы, 12 ил.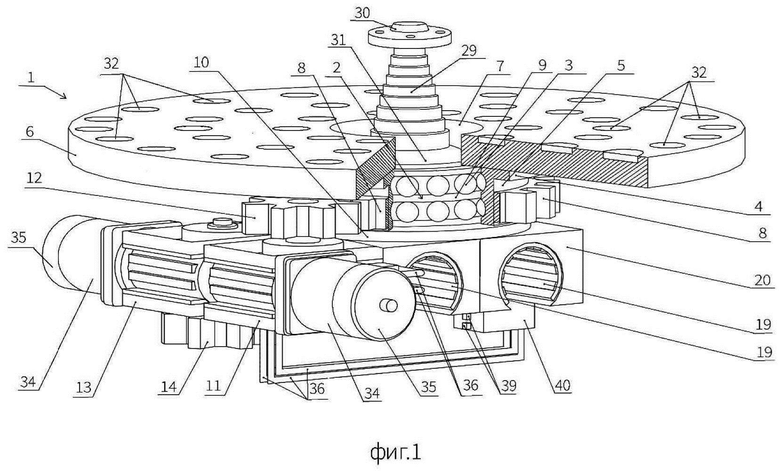
1. Тренажер для симуляции всенаправленного пешего передвижения пользователя, содержащий рабочее место пользователя, выполненное в виде подвижной платформы с двумя подвижными площадками для ног пользователя, размещенными на продольных направляющих, установленных на поперечных направляющих подвижной платформы, при этом подвижная платформа выполнена с возможностью углового поворота в обе стороны вокруг центра углового поворота платформы за счет механизма углового поворота подвижной платформы, каждая площадка оснащена своим механизмом перемещения площадки по продольным направляющим, а поперечные направляющие содержат механизм перемещения по поперечным направляющим продольных направляющих, за счет которого установленные подвижно на них продольные направляющие с размещёнными на них площадками для ног имеют возможность по очереди осуществлять перемещения над центром углового поворота подвижной платформы.
2. Тренажер по п.1, отличающийся тем, что каждая из двух подвижных площадок для ног содержит механизм углового поворота.
3. Тренажер по п.1, отличающийся тем, что поперечные направляющие могут быть общими для продольных направляющих обеих площадок или продольные направляющие каждой площадки подвижно установлены на своих поперечных направляющих.
4. Тренажер по п.1, отличающийся тем, что содержит детекторный блок, в который входят приспособления, отслеживающие расположение стоп на верхней части площадки и передвижение ног пользователя, а также приспособления, отслеживающие размещение верхней поверхности и горизонтальное перемещение площадок для ног.
5. Тренажер по п.1, отличающийся тем, что содержит блок электроприводов, включающий в себя прибор управления и электромеханические компоненты.
6. Тренажер по п.1, отличающийся тем, что содержит приспособление для осуществления плавного старта и торможения площадок для ног.
7. Тренажер по п.1, отличающийся тем, что верхние поверхности площадок для ног могут быть выполнены круглыми, или овальными, или прямоугольными, или прямоугольными со скошенными углами.
8. Тренажер по п.1, отличающийся тем, что верхние поверхности площадок для ног оборудованы механизмами подъема/опускания и изменения угла наклона.
9. Тренажер по п.1, отличающийся тем, что продольные и поперечные направляющие могут быть линейными или криволинейными.
10. Тренажер по п.1, отличающийся тем, что подвижная платформа выполнена в виде рамной конструкции, которая неподвижно закрепляет поперечные направляющие относительно друг друга.
| УСТРОЙСТВО ДЛЯ ВЗАИМОДЕЙСТВИЯ ПОЛЬЗОВАТЕЛЯ С ВИРТУАЛЬНОЙ РЕАЛЬНОСТЬЮ | 2016 |
|
RU2632758C1 |
| Всенаправленная дорожка для виртуальной реальности | 2022 |
|
RU2784682C1 |
| Способ получения перхлората П-фенилхинолиния | 1956 |
|
SU109979A1 |
| Тренажер для ног (варианты) | 2019 |
|
RU2718344C1 |
| Тренажер для реабилитации пациентов с нарушениями опорно-двигательного аппарата ЛЫЖИ и способ его применения | 2021 |
|
RU2751742C1 |
| Способ восстановления свинцовых аккумуляторов | 1956 |
|
SU112833A1 |
| ТРЕНАЖЕР ДЛЯ ГОРНОЛЫЖНИКОВ | 2021 |
|
RU2757660C1 |
| US 20200276473 A1, 03.09.2020. | |||

