Изобретение относится к наземным транспортным, главным образом быстроходным транспортным средствам - гусеничным и колесным с бортовым способом поворота машинам, конкретно - к их двухпоточным, преимущественно механическим, трансмиссиям с дифференциальными механизмами распределения мощности между бортами машины, иначе говоря - к механизмам передач и поворота.
В настоящее время основным типом трансмиссий гусеничных транспортных машин (главным образом, танков) является двухпоточный механизм передач и поворота (МПП) с использованием в параллельном потоке мощности гидрообъемной передачи (ГОП) самостоятельно или параллельно с гидромуфтой, вариатора, электропередачи или фрикционно-зубчатого механизма (ФЗМ) [Расчет и конструирование гусеничных машин: Учебник для вузов / Н.А. Носов, В.Д. Галышев, Ю.П. Волков, А.П. Харченко / Под ред. Н.А. Носова. - Л.: Машиностроение, 1972. - 560 с. - С. 374-395; Антонов А.С. Комплексные силовые передачи: Теория силового потока и расчет передающих систем. - Л.: Машиностроение. Ленингр. отд-ие, 1981. - 496 с. - С. 181-191; Галышев Ю.В., Добрецов Р.Ю., Поршнев Г.П., Худорожков С.И. Исследования и разработки ученых СПбГПУ в области оборонной техники (по материалам IX-й международной выставки вооружения, военной техники и боеприпасов) // «Научно-технические ведомости СПбГПУ», серия «Наука и образование», №1, 2014. - С. 26-32].
Известные двухпоточные МПП несмотря на их преимущества перед однопоточными (с точки зрения поворота) не могут обеспечить достаточное качество управления поворотом на высоких скоростях.
Расчетным радиусом поворота машины назовем радиус, реализуемый при полном замыкании фрикционного узла ФЗМ или предельном угле шайбы регулируемой гидромашины ГОП.
Диапазон расчетных радиусов поворота машины с известным дифференциальным двухпоточным МПП равен диапазону КП (если измерять радиус до центра тяжести машины). Так, если на первой передаче минимальный относительный радиус (в долях ширины колеи) равен 0,5, то на высшей передаче при диапазоне КП, равном 8 (восьми), минимальный относительный радиус равен 4 (четырем). Поворот с таким малым радиусом на высшей передаче не реализуется ввиду потери устойчивости управления. С другой стороны, минимальный радиус на высшей передаче, заданный приемлемой величиной 20 (двадцать), на первой передаче определяет минимальный радиус поворота 2,5 (два с половиной), что отрицательно сказывается на маневренности машины.
Для обеспечения минимальных радиусов поворота как на высшей, так и на низшей передаче без потери устойчивости управления необходимо создать трансмиссию с двухпоточным МПП, в которой диапазон изменения расчетных радиусов поворота машины не был бы ограничен диапазоном КП.
За базовую (исходную) обобщающую схему всех рассматриваемых аналогов целесообразно взять «обобщенную схему трансмиссии с двухпоточным дифференциальным механизмом поворота (МП)», характеризующуюся общим приводом обоих параллельных потоков мощности от «общего» двигателя, то есть от «нулевого» вала [Шеломов В.Б. Теория движения многоцелевых гусеничных и колесных машин. Тяговый расчет криволинейного движения: Учеб. пособие / В.Б. Шеломов. - СПб.: Изд-во Политехн. ун-та, 2013. - 92 с. - С. 60-65, рис. 2.5].
Наиболее близким аналогом (прототипом) заявляемого изобретения, то есть совпадающим с ним по назначению и по общим существенным конструктивным признакам, является двухпоточная трансмиссия транспортной машины (гусеничной) с бортовым способом поворота, содержащая коробку передач и механизм поворота, входные звенья которых параллельно присоединены к двигателю, бортовые суммирующие трехзвенные механизмы, каждый из которых одним входным своим звеном соединен с выходным звеном (валом) коробки передач, вторым входным своим звеном - с управляемым выходом механизма поворота, а выходным своим звеном - с бортовым редуктором, установленным на соответствующем борту перед ведущим колесом движителя машины, при этом упомянутые вторые входные звенья взаимосвязаны посредством устройства с передаточным отношением минус 1 (дифференциальная связь) [Буров С.С. Конструкция и расчет танков. - М.: Изд-во Академии бронетанковых войск им. маршала Р.Я. Малиновского. - С. 371-420, рис. 168 (упрощенная обобщенная схема), рис. 170 (частный вариант с ФЗМ - Argus Lenkapparat L St0.2, исторически первый механизм данного типа, примененный на шасси танка «Тигр» Sd.Kfz.181 - прототип), рис. 171 (варианты с гидрообъемными МП].
В прототипе отбор мощности в параллельный поток МП осуществляется из точки между двигателем и КП, угловая скорость в которой не зависит от номера включенной передачи.
Прототипу свойственны вышеприведенные недостатки известного дифференциального МПП, которые частично исправляются наличием двух расчетных радиусов, что требует введения дополнительно 2-х фрикционных узлов. Наличие в основном потоке ступенчатой КП как трансформирующего механизма делает актуальным рассмотрение вопроса о связи между величинами радиуса поворота, с одной стороны, и передаточного отношения на включенной передаче в КП, с другой стороны. При традиционной организации отбора мощности (см. аналоги и прототип) на входе ветви МП присутствует частота вращения двигателя или ей пропорциональная, от передаточного отношения не зависящая. Однако невыгодно иметь завышенные значения расчетных радиусов поворота на низших передачах, обусловленные именно отсутствием такой зависимости (взаимосвязи). Если в параллельном потоке мощности установлена ГОП, то относительно велика нагрузка на последнюю. Если в параллельном потоке мощности установлен ФЗМ, поворот с нерасчетным радиусом (при условии отсутствия буксования элемента(ов) управления в МП) сопровождается относительно большими потерями энергии. Последний факт признается в традиционных источниках (см. Носов Н.А. и др.).
Таким образом, известная двухпоточная трансмиссия (прототип) имеет недостаточно высокие тактико-технические (в приложении к военным и специальным транспортным машинам) или технико-эксплуатационные (в приложении к гражданским транспортным машинам) характеристики.
Задача, на решение которой направлено заявляемое изобретение, заключается в устранении указанных недостатков прототипа и, соответственно, в улучшении технико-эксплуатационных или тактико-технических характеристик транспортных машин с бортовым способом поворота.
Решение поставленной задачи достигается тем, что в двухпоточной трансмиссии транспортной машины с бортовым способом поворота, содержащей коробку передач и механизм поворота, входные звенья которых параллельно присоединены к двигателю, бортовые суммирующие трехзвенные механизмы, каждый из которых одним входным своим звеном соединен с выходным звеном (валом) коробки передач, вторым входным своим звеном - с управляемым выходом механизма поворота, а выходным своим звеном - с бортовым редуктором, установленным на соответствующем борту перед ведущим колесом движителя машины, при этом вторые входные звенья бортовых суммирующих трехзвенных механизмов взаимосвязаны посредством устройства с передаточным отношением минус 1, дополнительно предусмотрен центральный трехзвенный механизм, два входных звена которого соединены, соответственно, с двигателем и с выходным звеном (валом) коробки передач, а третье, выходное, звено - с входным звеном механизма поворота.
Решение поставленной задачи достигается также за счет дополнительных конструктивных признаков (при сформулированной выше основной совокупности признаков трансмиссии):
- в трансмиссии бортовые суммирующие и центральный трехзвенные механизмы могут быть выполнены в виде планетарных рядов, при этом у последнего с двигателем соединено водило, с выходным звеном (валом) коробки передач - солнце, а с входным звеном механизма поворота - эпицикл (это позволяет относительно простыми и дешевыми механическими средствами, с использованием известных преимуществ дифференциалов и с принципиальной возможностью использования принципа унификации в технике, реализовать заявленное техническое решение поставленной задачи, по основной совокупности признаков сформулированное в относительно общем его виде);
- в трансмиссии центральный трехзвенный механизм может быть скомпонован вне коробки передач и механизма поворота (это соответствует принципу модульности в машиностроении, расширяя возможности модернизаций имеющихся трансмиссий и создания семейства трансмиссий с взаимозаменяемыми агрегатами, а также сохраняя неизменными дорогостоящие агрегаты в индивидуальных картерах - коробки передач и исходной части механизма управления поворотом; в итоге, дополнительный конструктивный признак направлен на развитие решения основной поставленной задачи - улучшения характеристик машины в целом);
- в трансмиссии центральный трехзвенный механизм может быть скомпонован в общем картере с механизмом поворота (это может считаться целесообразным в случае создания нового механизма поворота, во всяком случае существенно не базирующегося на исходной части такового, что позволит, в частности, частично скомпенсировать неизбежный рост массогабаритных показателей из-за введения дополнительной составляющей трансмиссии - центрального трехзвенного механизма).
Среди известных трансмиссий и приводов, а также устройств и способов поворота не обнаружены такие, совокупность существенных признаков которых совпадала бы с заявленной. В то же время именно за счет последней достигается новый технический результат в соответствии с поставленной задачей.
Заявляемое устройство двухпоточной дифференциальной трансмиссии транспортной машины (на примере ФЗМ или ГОП в качестве базовой части МП) пояснено на чертежах:
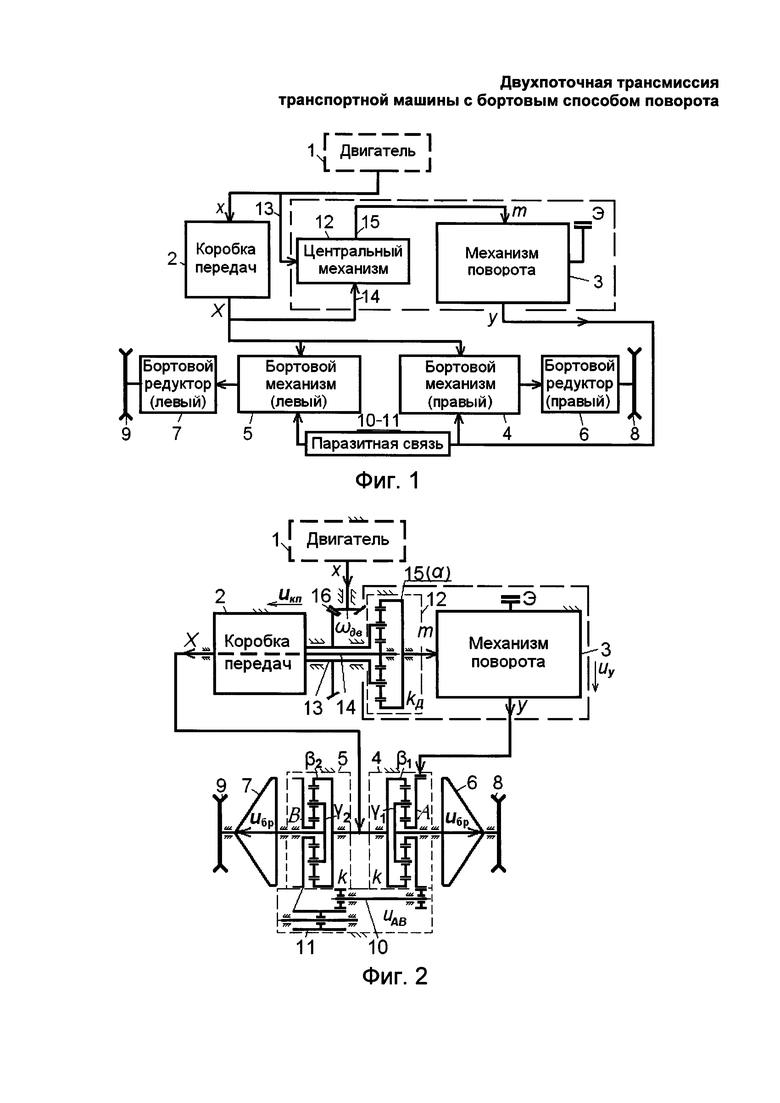
на фиг. 1 показана обобщенная блочно-кинематическая схема заявляемой трансмиссии с центральным трехзвенным механизмом, включенным в ветвь механизма поворота, где:
x и m - соответственно входные звенья коробки передач и МП;
X - выходной вал коробки передач;
Э - элемент (средство) управления (режимы «Э») выходными величинами МП (фрикцион или фрикционы с гидросистемой управления, шайба насоса ГОП и т.п.);
у - выходной вал МП;
на фиг 2 - блочно-кинематическая схема заявляемой трансмиссии с отдельно стоящим центральным трехзвенным механизмом, где:
ωдв - скорость вращения выходного звена (коленчатого вала) двигателя (при прямой связи КП с двигателем) или ведомого звена согласующего редуктора при наличии последнего, как это изображено в данном примере;
uу - передаточные отношения в базовой части МП как функция режима «Э»;
k - кинематический параметр планетарного ряда - бортового трехзвенного механизма;
β1 и β2 - одни входные звенья (преимущественно эпициклы) соответственно правого и левого бортовых суммирующих трехзвенных механизмов;
А и В - другие входные звенья (преимущественно солнца) соответственно правого и левого бортовых суммирующих трехзвенных механизмов;
y1 и y2 - выходные звенья (преимущественно водила) суммирующих трехзвенных механизмов соответственно правого и левого бортов;
uAB - передаточное отношение устройства взаимосвязи звеньев А и В бортовых суммирующих трехзвенных механизмов;
uкп - передаточное отношение в КП;
uбр - передаточное отношение бортового редуктора;
kД и α - соответственно кинематический параметр и выходное звено (преимущественно эпицикл) планетарного ряда - центрального дифференциального трехзвенного механизма.
Заявляемая двухпоточная трансмиссия, предназначенная для быстроходной транспортной гусеничной или колесной (многоколесной) машины с бортовым способом поворота, по любому из возможных частных вариантов конструктивного ее исполнения содержит (см. фиг. 1, 2) подключаемые к двигателю 1 (например, ДВС) коробку передач (КП) 2 и механизм поворота (МП) 3 (не напрямую, а опосредованно - см. далее по тексту). Входное звено х КП 2 присоединено к двигателю 1 с образованием одноименного потока мощности «х».
В состав МП 3 входит элемент (средство) Э (например, для правого борта машины) управления выходной величиной (передаточным числом uу и соответственно скоростью, моментом вращения и, возможно, частотой/скважностью воздействия) на его выходном валу у.
Имеются два бортовых суммирующих (дифференциальных) трехзвенных механизма (см. фиг. 2) - бортовой дифференциал 4 правого борта и бортовой дифференциал 5 левого борта с одинаковыми кинематическими параметрами k. Каждый из механизмов 4, 5 одним входным своим звеном (β1 и β2 соответственно борту, преимущественно эпициклом) в параллель соединен с выходом (выходным валом X) КП 2, вторым входным своим звеном (A и B соответственно борту, преимущественно солнцем) - с управляемым выходом y МП 3, а выходным своим звеном (y1 и y2 соответственно борту, преимущественно водилом) - с соответствующим (правым 6 и левым 7) бортовым редуктором, установленным перед соответствующим (правым 8 и левым 9) ведущим колесом (звездочкой) движителя машины. Упомянутые вторые входные звенья A и B взаимосвязаны посредством устройства («паразитной связи») с передаточным отношением uАВ=-1 (в данном примере - валика 10 с паразитным звеном 11).
На входе (т.е. перед входным звеном) МП 3 дополнительно предусмотрен центральный трехзвенный механизм 12 («центральный дифференциал»). Функционально он входит в состав механизма поворота (на фиг. 1, 2 ограничен внешним пунктирной рамкой), но компоновочно - не обязательно (см. далее по тексту). При этом входные звенья 13 и 14 механизма 12 соединены соответственно с входным звеном (валом) КП 2 (а значит - с двигателем 1) и с выходным звеном (валом) Х КП 2, а третье, выходное, звено 15 - с входным звеном (входом) МП 3, с образованием потока мощности «m», параллельного ранее упомянутому потоку мощности «х» заявляемой двухпоточной трансмиссии. Таким образом, МП 3 своим входом соединен со входом х (входным звеном) КП 2 опосредованно - через механизм 12.
По частному, рациональному и рекомендуемому в первую очередь конструктивному варианту заявляемой трансмиссии (см. фиг. 2) как бортовые 4, 5, так и центральный трехзвенный механизм 12 могут быть выполнены в виде планетарных рядов. При этом у механизма 12 с двигателем 1 соединено водило 13, с выходным звеном (валом) Х КП 2 - солнце 14, а со входом МП 3 (иначе говоря - входом МП 3) - эпицикл 15.
Предложены варианты компоновки устройства. Согласно первому из них механизм 12 скомпонован (пространственно расположен) вне МП 3 и вне КП 2. Согласно второму - скомпонован (пространственно расположен) в общем картере с МП 3 (см. упомянутый пунктирный контур на фиг. 1, 2).
Введение в трансмиссию при какой-либо необходимости таких дополнительных устройств, как, например, главного фрикциона либо согласующего редуктора (поз. 16 на фиг. 2) сразу после коленчатого вала двигателя 1 или непосредственно перед КП 2 (ее гидротрансформатором), не существенно с позиций данного изобретения, так как в этом случае агрегаты 2 и 3 по-прежнему будут подключены к двигателю 1, но не непосредственно, а опосредованно через эти дополнительные устройства.
Возможны другие кинематические схемы и конструкции в рамках заявляемых основной и дополнительных совокупностей существенных признаков.
Так, например, поскольку использование заявляемого устройства становится затруднительным при увеличенном диапазоне передач заднего хода, рекомендуется использование реверс-редуктора (не показан) на входе в МПП и КП без заднего хода.
Устройство работает следующим образом.
Наличие в основной ветви «х» ступенчатого трансформирующего механизма (КП) 2 делает актуальным рассмотрение вопроса о связи между величиной радиуса поворота, реализуемого при различных включенных передачах в КП 2.
Рассмотрим механические ветви трансмиссии, передающие движение от двигателя 1 к ведущим колесам 8 и 9. Перед входом в КП 2 поток мощности двигателя 1 разветвляется (упомянутые ветви «x» КП 2 и «m» МП 3).
Благодаря организации привода ветви «m» через механизм 12, водило 13 которого связано с входным звеном (валом) х КП 2 (двигателем 1), солнце (иначе говоря, солнечная шестерня) - с выходным звеном (валом) X КП 2, а эпицикл (иначе говоря - эпициклическая шестерня) 15 (при кинематическом анализе ее обозначают символом α - см. фиг. 2), приводит во вращение вал ветви m. Механизм 12 характеризуется внутренним передаточным отношением 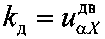 .
.
Поскольку МП 3 изображена блоком, то есть в обобщающем виде, будем рассматривать наиболее распространенную группу МПП с остановленными при прямолинейном движении солнцами А и В суммирующих рядов, хотя не исключается использование двух других классификационных групп МПП (см. прототип, рис. 169 на с. 373).
Рассмотрим кинематику устройства.
Величина передаточного отношения uбр бортовых редукторов 6 и 7 не влияет на передаточное отношение МП 3. Поэтому в качестве ведомых звеньев бортов машины принимаем ведущие звенья бортовых редукторов 6 и 7 соответственно. Эти звенья являются водилами y1 и y2 суммирующих планетарных механизмов 5 и 6 соответственно. Звено X приводится в движение КП 2. Факт взаимосвязи звеньев А и В передаточным отношением uАВ=(-1) посредством валика 10 и паразитной шестерни 11 определяет дифференциальный тип МПП. Правая выходная ветвь МП 3 приводит в движение звено А со скоростью вращения, управляемой элементом управления Э. Это тормоз или блокирующий фрикцион. Он же за счет указанной взаимосвязи uАВ=(-1) вращает звено А в обратном направлении либо приводит в движение звено В в прямом направлении (см. фиг. 2).
Использование ГОП или другой непрерывной передачи не меняет логику рассмотрения.
Суммирующие планетарные механизмы характеризуются параметром 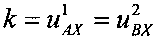 . Передаточные отношения ветви «x» и ветви «m» при полном включении элемента управления Э (максимальных углах шайбы насоса ГОП) известны. Они равны uКП и uУф. При буксующем элементе управления (частичном угле шайбы) в ветви «m» устанавливается текущее передаточное отношение uУ (побортно).
. Передаточные отношения ветви «x» и ветви «m» при полном включении элемента управления Э (максимальных углах шайбы насоса ГОП) известны. Они равны uКП и uУф. При буксующем элементе управления (частичном угле шайбы) в ветви «m» устанавливается текущее передаточное отношение uУ (побортно).
Механизмы трансмиссии (с учетом введения механизма 12) (см. фиг. 2) связывают скорости ω вращения звеньев (см. индексы при ω) следующими уравнениями:
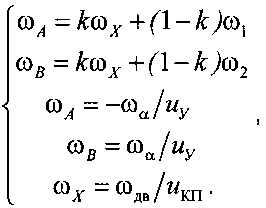
где индексы «1» и «2» эквивалентны символам y1 и y2, относящим эти угловые скорости к выходным звеньям (водилам) бортовых механизмов 4 и 5 соответственно правого и левого бортов машины.
Кинематика центрального механизма 12 описывается уравнением
ωX=kдωα+(1-kд)ωдв,
откуда 
Введем обозначение  и запишем ωα=tωдв.
и запишем ωα=tωдв.
Важно, что t=t(uКП,kд).
Решением системы уравнений является выражение передаточного отношения МП:
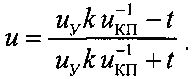
В частном случае при t=1 (что соответствует прототипу, то есть до введения механизма 12) получим выражение 2.13, приведенное в близком аналоге [Шеломов В.Б., с. 62].
Передаточные отношения механизмов, перечисляемые как множители первого слагаемого числителя, следуют по замкнутому контуру Z:

Тогда выражение передаточного отношения МП принимает вид:
Введение понятия замкнутого контура в рассматриваемом случае позволяет абстрагироваться от передаточных отношений отдельных элементов конструкции и сосредоточить внимание на одной ее характеристике. Такой характеристикой и служит передаточное отношение замкнутого контура Z. Поскольку известны конструкции, в которых водилом суммирующих планетарных механизмов выступает звено X, это решение следует просто учитывать в выражении для определения Z.
При полном включении элемента Э управления поворотом передаточное отношение замкнутого контура равно известной величине Zф.
Относительный радиус поворота машины с бортовым способом поворота связан с передаточным отношением между бортами выражением:
Тогда можно записать: ρ=-0,5Z/t и ρф=-0,5Zф/t (здесь ρф - относительный фиксированный или расчетный радиус поворота (для ГОП - минимальный)). При t=1 имеем частный случай этого выражения.
Полученные выражения позволяют утверждать:
- ρ=0 при Z=0 за счет uКП=∞, то есть поворот вокруг центра тяжести машины реализуется установкой в КП 2 режима «Стоп X»;
- ρ=∞ при Z=∞ за счет uУ=∞, то есть прямолинейное движение реализуется установкой в МП режима «Стоп A»;
- пусть поворот направо и налево управляется элементом Э, и когда на заднем ходу uКП изменяет знак, то изменяются знаки Z и ρ, и на заднем ходу поворот направо и налево реализуется включением элемента управления Э;
- установка гидротрансформатора в ветвь КП 2 делает фиксированный радиус поворота переменной величиной.
- величина фиксированного радиуса поворота изменяется в зависимости от номера передачи в КП 2 (передаточного отношения КП), что следует из зависимости Z от uКП. Это изменение происходит благоприятным образом: по мере увеличения скорости движения машины увеличивается величина фиксированного радиуса поворота.
Сравним относительные фиксированные радиусы поворота, получаемые без введения механизма 12 в ветвь МП 3 и при наличии такового.
Произведем пример расчета. Трансмиссия гусеничной машины характеризуется следующими величинами: k=(-2,5); uУ=12, колея B=2,8 м. Передаточные отношения КП uКП для пяти передач и режима «Стоп» и результаты расчетов приведены в таблице. При этом для сопоставления приведены расчетные данные для частного случая при t=1 и результаты, полученные для значения kд=(-2).
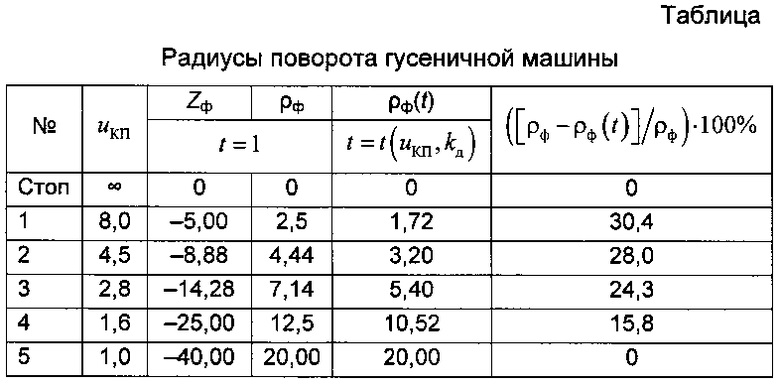
Таким образом, введение дополнительного устройства - центрального трехзвенного механизма 12 в привод ветви МП 3 двухпоточного МПП в составе трансмиссии транспортной машины позволило получить меньшие фиксированные радиусы поворота на низших передачах. В случае первой передачи снижение достигает 30% по сравнению с вариантом непосредственного привода от ведущего вала КП (см. таблицу).
По отношению к прототипу, дополнительно предложено устройство для расширения диапазона расчетных радиусов поворота двухпоточного механизма передач и поворота в составе трансмиссии, которое отвечает критериям «мировой уровень новизны», «изобретательский уровень» и «промышленная применимость» - трем составляющим изобретения.
Технический результат от использования заявляемого изобретения заключается в устранении указанных недостатков прототипа и, соответственно, в улучшении технико-эксплуатационных или тактико-технических характеристик, в приложении к транспортным машинам, преимущественно быстроходным гусеничным с бортовым способом поворота, за счет снижения минимальных радиусов поворота на низших передачах путем автоматического изменения частоты вращения на входе механизма поворота, параллельного коробке передач, сообразно номеру включенной передачи.
| название | год | авторы | номер документа |
|---|---|---|---|
| Трансмиссия наземного транспортного средства на базе вальной коробки перемены передач | 2022 |
|
RU2794081C1 |
| МЕХАНИЗМ РАСПРЕДЕЛЕНИЯ МОЩНОСТИ В ТРАНСМИССИИ ТРАНСПОРТНОГО СРЕДСТВА | 2021 |
|
RU2763002C1 |
| Привод транспортного средства с двухпоточным бесступенчатым механизмом передач и поворота | 2016 |
|
RU2652371C1 |
| ГИБРИДНЫЙ МЕХАНИЗМ РАСПРЕДЕЛЕНИЯ МОЩНОСТИ В ТРАНСМИССИИ ТРАНСПОРТНОЙ МАШИНЫ | 2017 |
|
RU2658486C1 |
| ТРАНСМИССИЯ ГУСЕНИЧНОЙ МАШИНЫ С ЦЕНТРАЛЬНОЙ СОСТАВНОЙ КОРОБКОЙ ПЕРЕДАЧ | 2010 |
|
RU2438908C1 |
| Электромеханический двухпоточный привод транспортной машины с бортовым способом поворота | 2018 |
|
RU2726881C2 |
| Механизм распределения мощности в трансмиссии транспортного средства | 2022 |
|
RU2789152C1 |
| ТРАНСМИССИЯ ГУСЕНИЧНОЙ МАШИНЫ | 1991 |
|
RU2031808C1 |
| СПОСОБ УПРАВЛЕНИЯ ГУСЕНИЧНОЙ МАШИНОЙ | 2024 |
|
RU2835218C1 |
| ТРАНСМИССИЯ ГУСЕНИЧНОЙ МАШИНЫ | 2012 |
|
RU2521158C1 |
Изобретение относится к двухпоточным трансмиссиям с дифференциальными механизмами распределения мощности гусеничных и колесных машин с бортовым способом поворота. Двухпоточная трансмиссия содержит коробку передач (КП) и механизм поворота (МП). Их входные звенья параллельно присоединены к двигателю. Каждый из бортовых суммирующих трехзвенных механизмов одним входным своим звеном соединен с выходным звеном (валом) КП, вторым входным своим звеном - с управляемым выходным звеном МП, а выходным своим звеном - с бортовым редуктором, установленным на соответствующем борту перед ведущим колесом движителя машины. Вторые входные звенья бортовых суммирующих трехзвенных механизмов взаимосвязаны посредством устройства с передаточным отношением минус 1. Предусмотрен центральный трехзвенный механизм. При этом два входных звена центрального трехзвенного механизма соединены соответственно с двигателем и с выходным звеном КП, а третье, выходное, звено - со входом МП. Бортовые суммирующие и центральный трехзвенные механизмы выполнены в виде планетарных рядов так, что с двигателем соединено его водило, с выходным звеном КП - солнце, а с входным звеном МП - эпицикл. Достигается повышение технико-эксплуатационных характеристик транспортных средств. 3 з.п. ф-лы, 2 ил., 1 табл.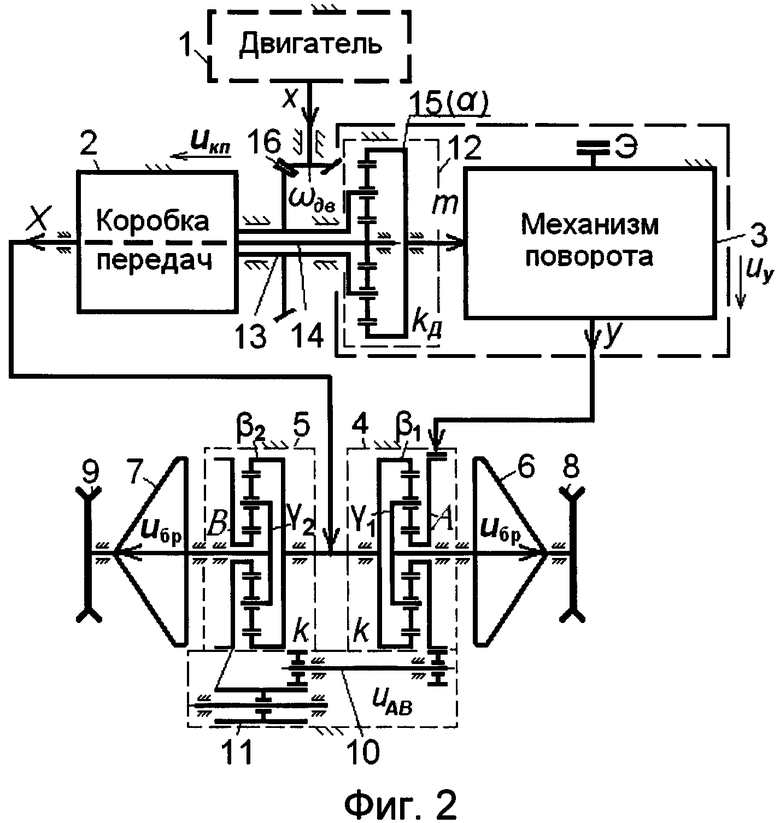
1. Двухпоточная трансмиссия транспортной машины с бортовым способом поворота, содержащая коробку передач и механизм поворота, входные звенья которых параллельно присоединены к двигателю, бортовые суммирующие трехзвенные механизмы, каждый из которых одним входным своим звеном соединен с выходным звеном коробки передач, вторым входным своим звеном - с управляемым выходом механизма поворота, а выходным своим звеном - с бортовым редуктором, установленным на соответствующем борту перед ведущим колесом движителя машины, при этом вторые входные звенья бортовых суммирующих трехзвенных механизмов взаимосвязаны посредством устройства с передаточным отношением минус 1, отличающаяся тем, что в ней дополнительно предусмотрен центральный трехзвенный механизм, два входных звена которого соединены, соответственно, с двигателем и с выходным звеном коробки передач, а третье, выходное, звено - с входным звеном механизма поворота.
2. Трансмиссия по п. 1, отличающаяся тем, что в ней бортовые суммирующие и центральный трехзвенные механизмы выполнены в виде планетарных рядов, при этом у последнего с двигателем соединено водило, с выходным звеном коробки передач - солнце, а с входным звеном механизма поворота - эпицикл.
3. Трансмиссия по п. 1, отличающаяся тем, что в ней центральный трехзвенный механизм скомпонован вне коробки передач и механизма поворота.
4. Трансмиссия по п. 1, отличающаяся тем, что в ней центральный трехзвенный механизм скомпонован в общем картере с механизмом поворота.
| ТРАНСМИССИЯ ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2025303C1 |
| Трансмиссия гусеничного транспортного средства | 1986 |
|
SU1399203A1 |
| СПОСОБ ПРОИЗВОДСТВА КОНСЕРВОВ "ЯЗЫК С СОУСОМ ИЗ ЗЕЛЕНОГО ГОРОШКА" СПЕЦИАЛЬНОГО НАЗНАЧЕНИЯ (ВАРИАНТЫ) | 2007 |
|
RU2332026C1 |

