Изобретение относится к машиностроению и может быть использовано там, где требуются малые массогабаритные характеристики изделия, например в беспилотных летательных аппаратах в качестве исполнительного механизма.
Прототипом является раздаточный редуктор, содержащий два снабженных кулачковыми муфтами ведомых вала со свободно размещенными на них шестернями и ведущий вал с закрепленной на нем шестерней и двумя дополнительными шестернями, каждая из которых находится в постоянном зацеплении с шестерней одного ведомого вала [А.с. СССР 138146 МПК В60К 17/344, 1961].
Недостатками прототипа являются:
- относительно сложная конструкция редуктора, обусловленная наличием большого числа шестерен;
- большие массогабаритные характеристики.
Задачей изобретения является упрощение конструкции, повышение ее надежности и улучшение эксплуатационных характеристик.
Задача решается тем, что в способе раздаточного механизма, включающем формирование кинематической связи между ведущим и одним из ведомых валами с последующей передачей крутящего момента посредством нее, формирование кинематической связи осуществляют путем винтового движения ведущего вала в одну сторону.
Винтовое движение создают, по крайней мере одной червячной передачей, в которой червяк выполняют заодно с ведущим валом, а червячное колесо затормаживают. Затормаживание червячного колеса осуществляют посредством пружинного нажимного фиксатора. Затормаживание червячного колеса осуществляют и посредством силы тяги электромагнита. Винтовое движение создают попеременным включением двух червячных передач, в которых червяки выполняют с взаимопротивоположным направлением навивки. Формирование кинематической связи с другим ведомым валом осуществляют путем винтового движения ведущего вала в другую сторону.
Указанные отличительные признаки позволяют достичь следующих преимуществ по сравнению с прототипом.
Формирование кинематической связи путем винтового движения ведущего вала в одну сторону упрощает конструкцию, поскольку передача крутящего момента и создание кинематической связи с одним из ведомых валов осуществляется с помощью единого привода (двигателя), что уменьшает массогабаритные характеристики и повышает эксплуатационные качества.
Создание винтового движения, по крайней мере одной червячной передачей, в которой червяк выполняют заодно с ведущим валом, а червячное колесо затормаживают, упрощает конструкцию механизма и повышает его надежность.
Затормаживание червячного колеса посредством пружинного нажимного фиксатора также упрощает конструкцию и повышает ее надежность.
Затормаживание червячного колеса и посредством силы тяги электромагнита обеспечивает реверсивное вращение ведомых валов и способствует увеличению их числа, что улучшает эксплуатационные характеристики.
Создание винтового движения попеременным включением двух червячных передач, в которых червяки выполняют с взаимопротивоположным направлением навивки, позволяет формировать кинематические связи с ведомыми валами посредством одностороннего вращения ведущего вала, т. е. без его реверса. Это расширяет функциональные возможности механизма и улучшает эксплуатационные характеристики.
Формирование кинематической связи с другим ведомым валом путем винтового движения ведущего вала в другую сторону упрощает конструкцию, повышает ее надежность и снижает массогабаритные характеристики.
Изобретение поясняется чертежами.
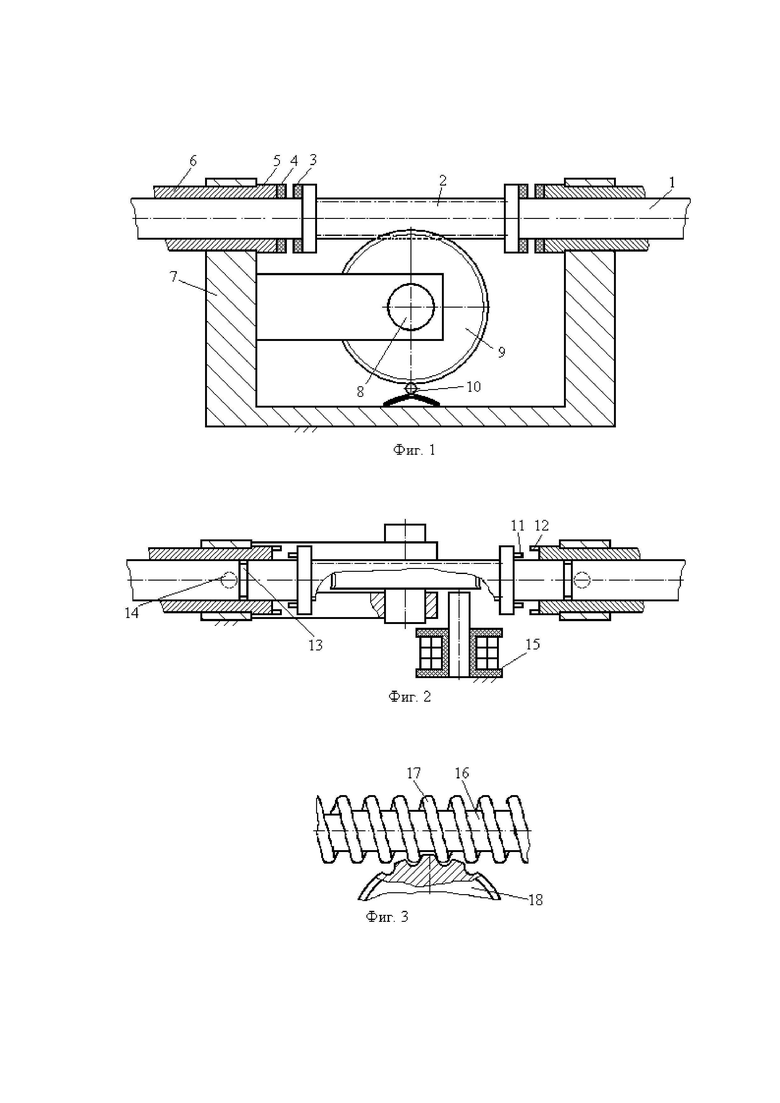
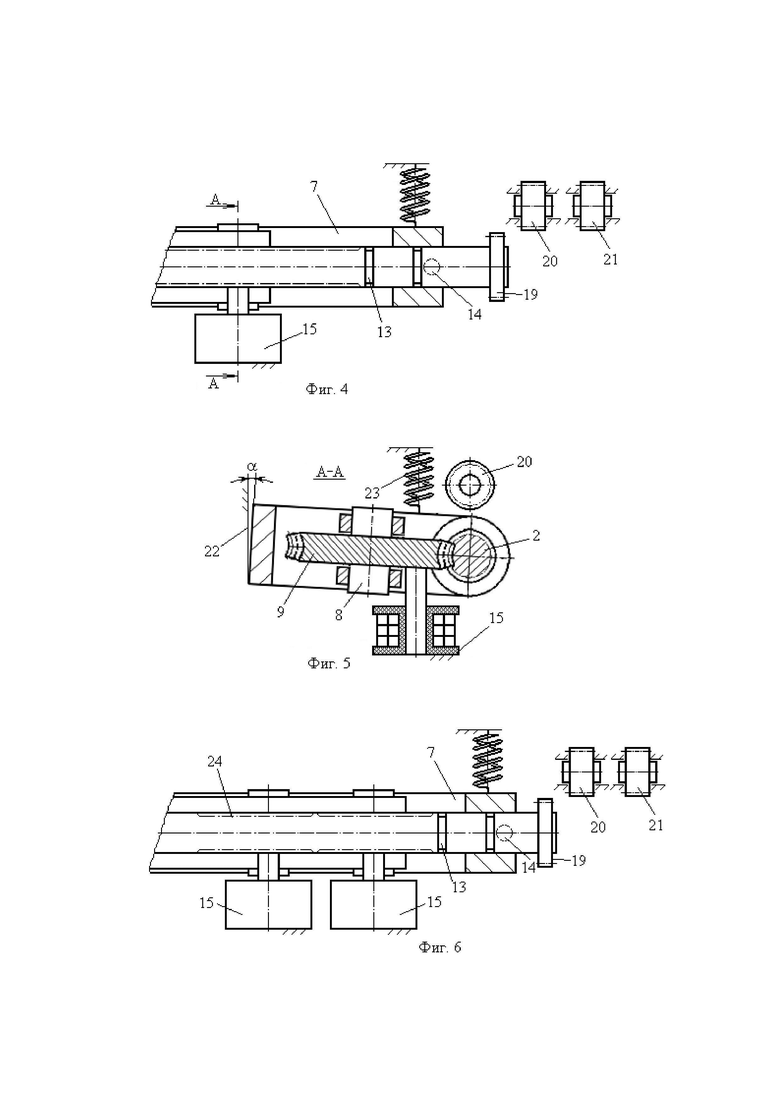
На фиг. 1 изображен раздаточный механизм с безреверсивным вращением ведомых валов. На фиг. 2 изображен раздаточный механизм с реверсивным вращением ведомых валов. На фиг. 3 изображен вариант упрощенной червячной передачи. На фиг. 4 изображен раздаточный механизм с реверсивным вращением множества ведомых валов. На фиг. 5 изображен разрез А-А раздаточного механизма с реверсивным вращением множества ведомых валов. На фиг. 6 изображен раздаточный механизм с безреверсивным вращением множества ведомых валов.
Раздаточный механизм содержит соединенный с приводом ведущий вал 1, одна часть которого выполнена в виде червяка 2 с фланцами, на которых неподвижно закреплена полумуфта 3 из упругого фрикционного материала (например резины), имеющая возможность взаимодействия с полумуфтой 4, неподвижно закрепленной на фланце 5 ведомого вала 6, установленного с возможностью вращения в одних опорах основания 7, в других опорах которого с возможностью вращения установлена ось 8 с закрепленным на ней червячным колесом 9, имеющим возможность взаимодействия с закрепленным на основании пружинным нажимным фиксатором 10 и сопряженным с червяком, при этом ведомый вал имеет возможность вращения и продольного перемещения в ведомых валах.
Фланцы червяка и ведомых валов соответственно могут быть выполнены виде зубчатых полумуфт 11, 12, а на ведомом валу могут быть сделаны проточки 13, имеющие возможность взаимодействия с установленными в опорах основания фиксаторами 14, при этом вместо пружинного нажимного фиксатора может быть применен электромагнит 15, имеющий возможность взаимодействия с червячным колесом. Червяк может быть выполнен в виде вала 16, на котором закреплена и охватывает его, по крайней мере, одна витая пружина 17, имеющая возможность зацепления с колесом 18. Фланец червяка может быть выполнен и в виде зубчатого колеса (шестерни, венца) 19, имеющего возможность взаимодействия с зубчатыми колесами 20, 21, жестко закрепленными на ведомых валах при этом основание может иметь возможность поворота на угол α относительно платформы 22, на которой установлены с возможностью вращения ведомые валы и закреплен конец упругого элемента (пружины) 23, другой конец которого закреплен на основании. На ведущем валу может быть выполнен червяк 24, с противоположным червяку 2 направлением навивки.
Способ реализуют следующим образом.
В исходном состоянии двигатель (не показан), вращающий ведущий вал 1 через шлицевое соединение, выключен, фрикционные муфты (слева и справа) расцеплены (фиг. 1). Для установления кинематической связи и приведение во вращение, например левого ведомого вала, включают двигатель в результате чего червяк 2 начинает вращаться. Поскольку червячное колесо удерживается от вращения пружинным нажимным фиксатором 10, то червяк 2 будет перемещаться вдоль своей оси, вращаясь, т. е. совершать винтовое движение. Это будет продолжаться до тех пор, пока полумуфты 3 и 4 не соединяться и не подвергнутся упругой деформации, в результате чего ведомый вал 6 начнет вращаться в опорах основания 7. Вследствие того, что осевое перемещение ведущего вала 1 прекратилось, а его вращение продолжается, то червячное колесо 9 вместе с осью 8 начнет вращаться в опорах основания 7, преодолевая тормозящее действие пружинного нажимного фиксатора, который будет скользить по зубьям и впадинам червячного колеса. После того, как ведомый вал будет повернут на нужный угол, двигатель выключают.
Для установления кинематической связи с правым ведомым валом включают двигатель в другую сторону (реверс), в результате чего червяк будет совершать винтовое движение в обратном направлении и приведет в действие правую фрикционную муфту, что вызовет вращение правого ведомого вала и проворачивание уже в другом направлении червячного колеса 9.
Осуществление реверсного вращения ведомых валов возможно при замене пружинного нажимного фиксатора, например электромагнитом, благодаря чему появляется возможность управления величиной момента фиксации, при этом фрикционная муфта может быть заменена на зубчатую (фиг. 2). Для установления кинематической связи, например с левым ведомым валом, включают электромагнит 15, в результате чего червячное колесо 9 (сделанное в данном случае из магнитного материала) притягивается к нему (к сердечнику электромагнита) за счет упругой деформации своего материала или/и перемещения оси 8 в пределах осевого люфта, или/и нежесткого (упругого) крепления самого электромагнита. В результате этого червячное колесо затормаживается, и последующее включение электродвигателя вызовет винтовое движение с осевым перемещением влево. После соединения полумуфт 11, 12 и взаимодействия фиксатора 14 с проточкой 13 электромагнит выключают, и червячное колесо начинает вращаться вхолостую, в результате чего осевое перемещение червяка приостанавливается. Для изменения направления вращения ведомого вала вращение двигателя меняют на противоположное. Аналогичным образом осуществляется установление кинематической связи с правым ведомым валом и передача ему крутящего момента. Червяк 2 может быть выполнен в упрощенном варианте в виде вала 16 с напрессованной на него пружиной 17 и колесом 18 (фиг. 3).
Для установления кинематической связи поочередно с большим числом ведомых валов (как слева, так и справа) включают закрепленный на платформе 22 электромагнит 15, в результате чего притягиваемое к нему червячное колесо увлекает за собой основание, закрепленное, например на оси, и между платформой и основанием образуется угол α (фиг. 4, 5). При этом расстояние между осями ведущего вала и ведомых валов увеличивается.
Далее включают двигатель, и ведущий вал начинает винтовое движение. Как только зубчатое колесо (шестерня) 19 окажется напротив нужного для передачи крутящего момента зубчатого колеса ведомого вала, например 21, электромагнит выключают, при этом фиксатор 14 оказывается в соответствующей проточке 13 (в данном случае левой на фиг. 4). Поступательное движение ведущего вала прекращается, так как червячное колесо начинает вращаться вхолостую, а пружина 23возвращает основание 7 в прежнее исходное на платформе 22 положение. В результате расстояние между осями ведущего вала и ведомых валов становится равным межцентровому, и шестерня 19 оказывается в зацеплении с зубчатым колесом 21. Установление кинематической связи с зубчатым колесом 20 производят аналогичным образом, меняя при этом только направление вращения ведущего вала.
Если вращение ведомых валов происходит только в одном направлении, то для перемещения шестерни 19 в другом направлении и исключения при этом реверса двигателя можно применить вторую червячную передачу с червяком 24 (фиг. 6). При затормаживании червячного колеса этой передачи вторым электромагнитом 15 вал начинает винтовое движение, сохраняя свое прежнее направление вращения и меняя направление поступательного движения. Такое безреверсное установление кинематических связей с ведомыми валами не только упрощает конструкцию двигателя, но и позволят не выключать его при частых переключениях передач, что экономит электроэнергию, потребление которой увеличивается в моменты включения за счет нежелательных бросков тока, которые, как правило, неблагоприятно сказываются на работе оборудования.
Внедрение изобретения позволит создать простой, надежный и удобный в эксплуатации механизм с малыми массогабаритными характеристиками.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЗАРЯЖАНИЯ ПУШКИ | 2024 |
|
RU2829232C1 |
| СПОСОБ НАРЕЗАНИЯ РЕЗЬБЫ | 2023 |
|
RU2819937C1 |
| СПОСОБ УПРАВЛЕНИЯ ГУСЕНИЧНОЙ МАШИНОЙ | 2024 |
|
RU2835218C1 |
| РЕГУЛЯТОР ТОРМОЗА ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2398984C2 |
| РЕГУЛЯТОР ТОРМОЗА ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2448289C2 |
| РЕГУЛЯТОР ТОРМОЗА ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2398986C2 |
| РЕГУЛЯТОР ТОРМОЗА ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2398983C2 |
| РЕГУЛЯТОР ТОРМОЗА ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2398985C2 |
| Вертикальный многошпиндельный станок | 1990 |
|
SU1722701A1 |
| РЕГУЛЯТОР ТОРМОЗА ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2519587C2 |
Изобретение относится к машиностроению, а более конкретно к приводам. Способ работы раздаточного механизма включает формирование посредством муфт связи между ведущим и одним из ведомых валами с последующей передачей крутящего момента. Формирование связи с одним ведомым валом осуществляют путем винтового движения ведущего вала в одну сторону. Создание связи с другим ведомым валом – путем винтового движения ведущего вала в другую сторону. Винтовое движение может быть создано червячной передачей. Затормаживание червячного колеса может быть осуществляют посредством пружинного нажимного фиксатора или тягой электромагнита. В состав механизма может входить две червячные передачи, с взаимопротивоположным направлением навивки. Достигается упрощение конструкции. 4 з.п. ф-лы, 6 ил.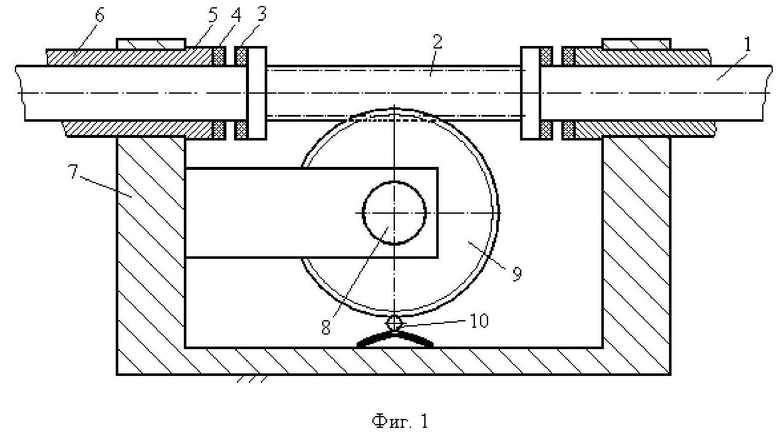
1. Способ работы раздаточного механизма, включающий формирование посредством муфт связи между ведущим и одним из ведомых валами с последующей передачей крутящего момента, отличающийся тем, что формирование связи с одним ведомым валом осуществляют путем винтового движения ведущего вала в одну сторону, а создание связи с другим ведомым валом – путем винтового движения ведущего вала в другую сторону.
2. Способ по п. 1, отличающийся тем, что винтовое движение создают, по крайней мере, одной червячной передачей, в которой червяк выполняют заодно с ведущим валом, а червячное колесо затормаживают.
3. Способ по любому из пп. 1, 2, отличающийся тем, что затормаживание червячного колеса осуществляют посредством пружинного нажимного фиксатора.
4. Способ по любому из пп. 1, 2, отличающийся тем, что затормаживание червячного колеса осуществляют и посредством силы тяги электромагнита.
5. Способ по любому из пп. 1, 2, отличающийся тем, что винтовое движение создают попеременным включением двух червячных передач, в которых червяки выполняют с взаимопротивоположным направлением навивки.
| ЩЕЛЕРЕЗНОЕ ФРЕЗЕРНОЕ УСТРОЙСТВО | 2005 |
|
RU2295003C2 |
| Выключаемая муфта | 1987 |
|
SU1527423A1 |
| ЧЕРВЯЧНЫЙ МЕХАНИЗМ РЕВЕРСА | 0 |
|
SU369314A1 |
| ПРЕДОХРАНИТЕЛЬНОЕ ПРИСПОСОБЛЕНИЕ ДЛЯ МЕТАЛЛОРЕЖУЩИХ СТАНКОВ | 0 |
|
SU237631A1 |
| ЗАРЯДНАЯ СТАНЦИЯ ДЛЯ ГЕНЕРИРУЮЩЕГО АЭРОЗОЛЬ УСТРОЙСТВА С ЭЛЕКТРИЧЕСКИМ НАГРЕВОМ | 2018 |
|
RU2749737C2 |
| GB 902324 А, 01.08.1962 | |||
| JP 57040123 A, 05.03.1982 | |||
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАБОТЫ ЦАРАПАНИЯ АБРАЗИВНЫМ ИНСТРУМЕНТОМ ПОВЕРХНОСТИ ИСПЫТУЕМОГО ОБРАЗЦА | 2006 |
|
RU2305826C1 |
| Модуль манипулятора | 1980 |
|
SU984859A1 |
| СПОСОБ ИЗВЛЕЧЕНИЯ ЗАЩЕМЛЕННОГО ВОДОЙ ГАЗА | 2008 |
|
RU2379490C1 |

