Перекрестная ссылка на родственную заявку
Данная заявка заявляет приоритет согласно заявке на патент Китая №202010322764.8, озаглавленной «Downhole electromagnetic logging tool» и поданной 22 апреля 2020 года, полное содержание которой включено в данный документ посредством ссылки.
Область техники
Данное изобретение относится к скважинному электромагнитному каротажному инструменту, который принадлежит к области каротажного оборудования в области нефтегазового промыслового машиностроения.
Уровень техники
В настоящее время, по мере увеличения срока эксплуатации промысловых скважин нефтегазовых месторождений, все большее количество скважин подвергается деформации обсадных колонн. Поэтому необходимо своевременно узнавать состояние деформации скважинных обсадных колонн, чтобы дать рекомендации по последующим операциям. Традиционные технологии выявления дефектов обсадных колонн, такие как ультразвуковой видеокаротаж скважины, видеокаротаж «орлиный глаз» и каротаж с использованием с помощью штангенциркуля, представляют собой каротажные способы визуализации стенок насосно-компрессорных труб. При измерении деформированной обсадной колонны, измерение может быть выполнено только тогда, когда инструмент для выявления дефектов непосредственно касается внутренней стенки обсадной колонны после извлечения насосно-компрессорных труб. В частности, на месторождениях высокосернистого газа в колонне насосно-компрессорных труб используется постоянный пакер. Перед извлечением насосно-компрессорных труб необходимо выполнить ряд операций, таких как глушение скважины, временное тампонирование нефтяного пласта, фрезерование пакера и тому подобное. Эти операции сложны, занимают много времени, дороги и сопряжены с высоким риском, поэтому такие способы каротажа с прямым контактом с обсадной колонной имеют ограниченное применение. Поэтому необходимо проводить трехмерную точную оценку деформации обсадной колонны через насосно-компрессорные трубы.
По этой причине был предложен инженерное электромагнитное каротажное устройство, которое выполняет каротаж на основе электромагнитной информации. Поскольку инженерное электромагнитное каротажное устройство является неразрушающим, бесконтактным прибором, на который не так легко воздействовать скважинной жидкостью, отложениями осадков и парафина, он становится одной из наиболее широко используемых технологий выявления дефектов обсадных колонн.
В целом, инженерное электромагнитное каротажное устройство состоит из продольного длинного зонда, продольного короткого зонда и поперечного зонда. Продольный длинный зонд и продольный короткий зонд расположены параллельно оси устройства. Поперечный зонд состоит из двух взаимно перпендикулярных катушек, которые расположены вертикально по отношению к оси устройства. Все зонды работают в режиме самопередачи и самоприема, так что каждый зонд действует как передатчик и приемник. Во время измерения зонды приводятся в действие набором импульсных токов в течение короткого времени для создания переменного магнитного поля, которое воздействует на обсадную колонну для создания в ней индуцированного вихретокового электрического поля. Во время отключения магнитного поля передающего источника вторичное магнитное поле, создаваемое вихретоковым электромагнитным сигналом, будет генерировать индуцированную электродвижущую силу в зондах. Определяя величину и изменение индуцированной электродвижущей силы, можно оценить параметры обсадной колонны, включая толщину стенки обсадной колонны, трещины в стенке обсадной колонны, смещение обсадной колонны, тип и степень деформации обсадной колонны и тому подобное. Однако индуцированная электродвижущая сила, получаемая зондами, представляет собой вторичное магнитное поле, содержащее возбуждающее магнитное поле и вихретоковое электрическое поле обсадной колонны. Поэтому для многослойной колонны труб, чтобы достичь большего расстояния выявления дефектов и более высокой точности выявления дефектов, необходимо соответственно увеличить ток для зондов, чтобы увеличить силу возбуждающего магнитного поля. Однако, учитывая ограничение внутреннего диаметра насосно-компрессорных труб, это значительно увеличит стоимость компонентов и сложность изготовления устройства.
Поэтому предлагается использовать матрицу датчиков магнитного поля для получения информации о магнитном поле, чтобы повысить точность выявления дефектов. Например, в документе CN 110965983 A раскрыт скважинный электромагнитный дефектоскоп, который представляет собой электромагнитный каротажный инструмент, в котором используется раздельная передача и прием сигналов, а также прием матрицы. Скважинный электромагнитный дефектоскоп содержит модуль процессора, передающую катушку и матрицу датчиков магнитного поля, реализуя несколько одновременных приемов для одной передачи, что сокращает период одного приема. Соответственно, уменьшается отклонение между углом начала записи и углом окончания записи каждого датчика, тем самым повышая точность измерения. Основанный на принципе электромагнитной индукции, этот детектор использует униполярную эмиссию прямоугольного кратковременного (обычно 300-500 мс) импульсного тока для управления током переключения передающей катушки для создания магнитного поля. Поскольку насосно-компрессорные трубы обычно изготавливают из высокосернистых сплавов на основе никеля с низкой магнитной проницаемостью, большая часть магнитного поля, создаваемого током переключения передающей катушки, может быть непосредственно передана в обсадную колонну после проникновения через насосно-компрессорные трубы, так что насосно-компрессорные трубы и обсадная колонна будут одновременно генерировать вторичное электромагнитное поле, которое будет принято матрицей датчиков магнитного поля. Такие два типа сигналов накладываются друг на друга, и тогда информацию об обсадной колонне можно получить путем анализа сигналов. Однако линии магнитного поля униполярной передающей системы относительно рассеяны, поэтому невозможно сфокусировать большую часть магнитного поля на обсадной колонне после проникновения через насосно-компрессорные трубы. Поэтому сложность анализа сигналов возрастает, а точность интерпретации состояния обсадной колонны, соответственно, снижается.
Сущность изобретения
Целью данного изобретения является создание скважинного электромагнитного каротажного инструмента, с помощью которого можно решить проблему неточности измерений традиционными каротажными инструментами.
Для этого в данном изобретении предлагается скважинный электромагнитный каротажный инструмент, который содержит передающую систему для создания магнитного поля, матрицу датчиков магнитного поля для приема вторичного магнитного поля и модуль управления, соединенный с передающей системой и матрицей датчиков магнитного поля. Передающая система включает верхнюю передающую катушку и нижнюю передающую катушку, расположенные над и под матрицей датчиков магнитного поля, соответственно, для создания магнитных полей с противоположными полярностями и противоположными направлениями, так что магнитные поля с разными направлениями концентрируются, согласно принципу однополярного отталкивания, в месте, где расположена матрица датчиков магнитного поля. Матрица датчиков магнитного поля принимает вторичное магнитное поле для завершения выявления дефектов на обсадной колонне.
Техническое решение скважинного электромагнитного каротажного инструмента в соответствии с данным изобретением позволяет получить следующий технический эффект. Передающая система данного изобретения содержит две передающие катушки, т.е. верхнюю передающую катушку и нижнюю передающую катушку, расположенные над и под матрицей датчиков магнитного поля соответственно. Когда магнитные поля, генерируемые верхней и нижней передающими катушками, направлены в противоположные стороны, полярность одного конца верхней передающей катушки, расположенного вблизи матрицы датчиков магнитного поля, совпадает с полярностью одного конца нижней передающей катушки, расположенного вблизи матрицы датчиков магнитного поля. Согласно принципу однополярного отталкивания, магнитные поля более сконцентрированы в точке выявления дефектов и будут сконцентрированы на обсадной колонне с большим радиусом после прохождения через насосно-компрессорные трубы, так что магнитное поле, сформированное на обсадной колонне, может быть сконцентрировано, что указывает на усиление силы магнитного поля в целом. Поэтому, когда верхняя передающая катушка и нижняя передающая катушка выключены, обсадная колонна будет генерировать большее вторичное магнитное поле, которое несет больше информации об обсадной колонне для приема матрицей датчиков магнитного поля. Поскольку передается больше информации об обсадной колонне, форма обсадной колонны может быть определена более точно, так что выявление дефектов обсадной колонны может быть более точным.
Далее, чтобы верхняя передающая катушка и нижняя передающая катушка могли генерировать магнитные поля с противоположными полярностями удобным и надежным образом, верхняя передающая катушка и нижняя передающая катушка намотаны одинаковым образом, так что магнитные поля с противоположными полярностями могут генерироваться токами одинаковой величины, но противоположных направлений, протекающими в катушках.
Далее, для создания концентрированных магнитных полей верхней передающей катушкой и нижней передающей катушкой, а также для увеличения силы магнитных полей, создаваемых верхней передающей катушкой и нижней передающей катушкой, верхняя передающая катушка и нижняя передающая катушка содержат магнитный цилиндр, намотанный низкоомным изоляционным кабелем из многовитковых замкнутых катушек.
Далее, чтобы управлять включением и выключением верхней передающей катушки и нижней передающей катушки удобным, гибким и надежным способом и повысить эффективность выявления дефектов, скважинный электромагнитный каротажный инструмент может дополнительно содержать модуль силового привода, в котором модуль управления соединен с верхней передающей катушкой и нижней передающей катушкой через модуль силового привода.
Далее, чтобы расширить зону охвата матрицы датчиков магнитного поля, улучшить ее угловое разрешение, повысить точность выявления дефектов на обсадной колонне и уменьшить слепую зону выявления дефектов, матрица датчиков магнитного поля может быть поворотной матрицей датчиков магнитного поля, а скважинный электромагнитный каротажный инструмент дополнительно содержит приводное устройство для приведения матрицы датчиков магнитного поля во вращение, причем приводное устройство соединено с модулем управления.
Кроме того, для повышения точности управления вращением поворотной матрицы датчиков магнитного поля, приводное устройство может представлять собой вращающийся шаговый двигатель, с помощью которого модуль управления управляет вращением поворотной матрицы датчиков магнитного поля.
Далее, матрица датчиков магнитного поля может содержать корпус матрицы датчиков магнитного поля, по меньшей мере два датчика магнитного поля, монтажный кронштейн для крепления датчиков и немагнитный каркас для крепления монтажного кронштейна.
Кроме того, матрица датчиков магнитного поля может состоять из корпуса матрицы датчиков магнитного поля, по меньшей мере двух датчиков магнитного поля, монтажного кронштейна для крепления датчиков и немагнитного каркаса для крепления монтажного кронштейна, причем немагнитный каркас устанавливается на вращающийся вал приводного устройства.
Далее, для облегчения работы скважинного электромагнитного каротажного инструмента, скважинный электромагнитный каротажный инструмент может дополнительно содержать естественный гамма-зонд, модуль записи траектории движения и датчик температуры, в которых естественный гамма-зонд, модуль записи траектории движения и датчик температуры соединены с модулем управления, а передающая система, матрица датчиков магнитного поля, модуль управления, естественный гамма-зонд, модуль записи траектории движения и датчик температуры расположены в корпусе инструмента.
Кроме того, для облегчения размещения и извлечения скважинного электромагнитного каротажного инструмента на каждом конце корпуса инструмента может быть обеспечен центратор.
Краткое описание графических материалов
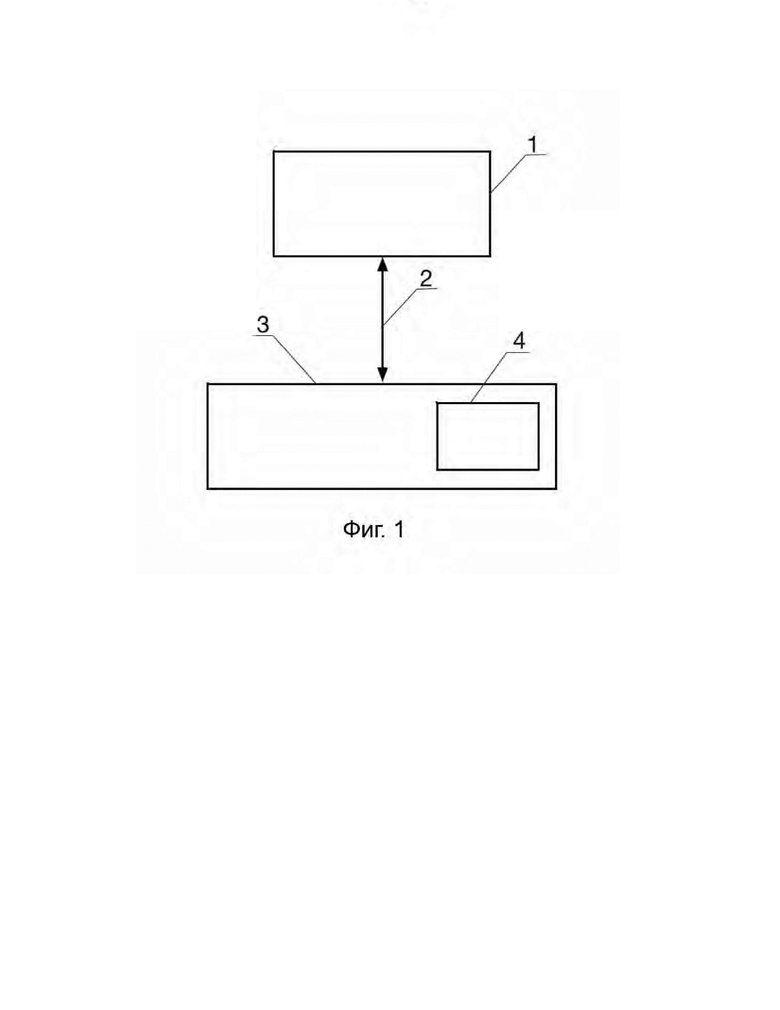
Фиг. 1 представляет собой системную блок-схему скважинного электромагнитного каротажного инструмента в соответствии с данным изобретением.
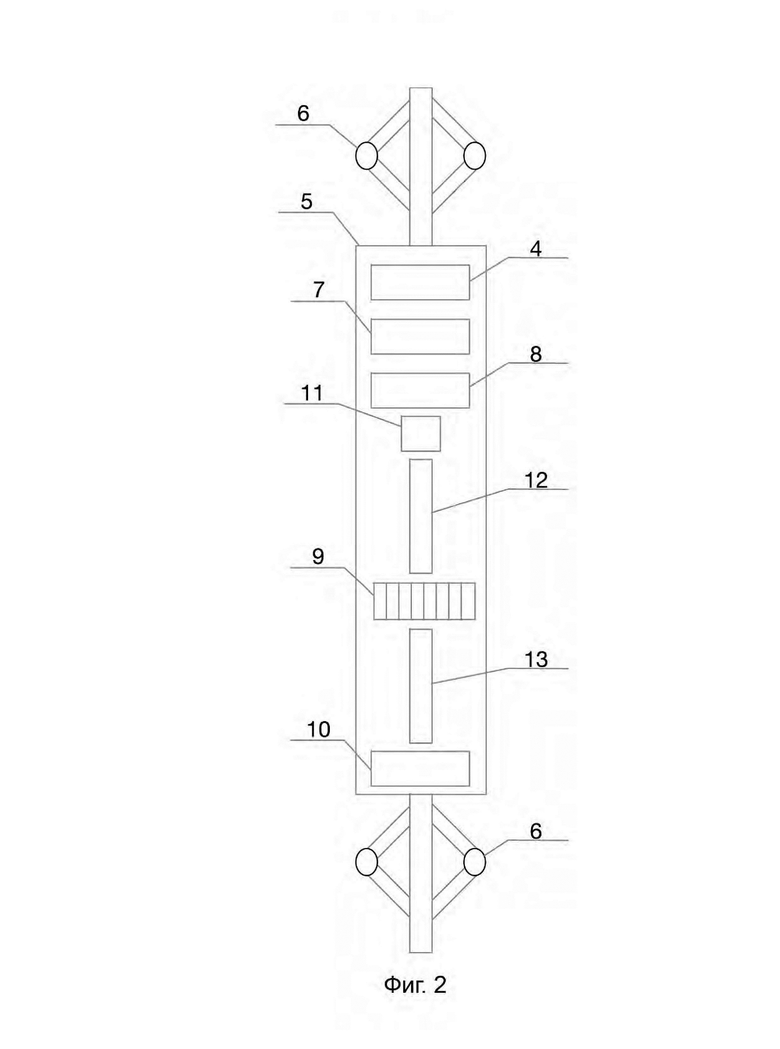
На Фиг. 2 схематично показана структура скважинного электромагнитного каротажного инструмента в соответствии с данным изобретением.
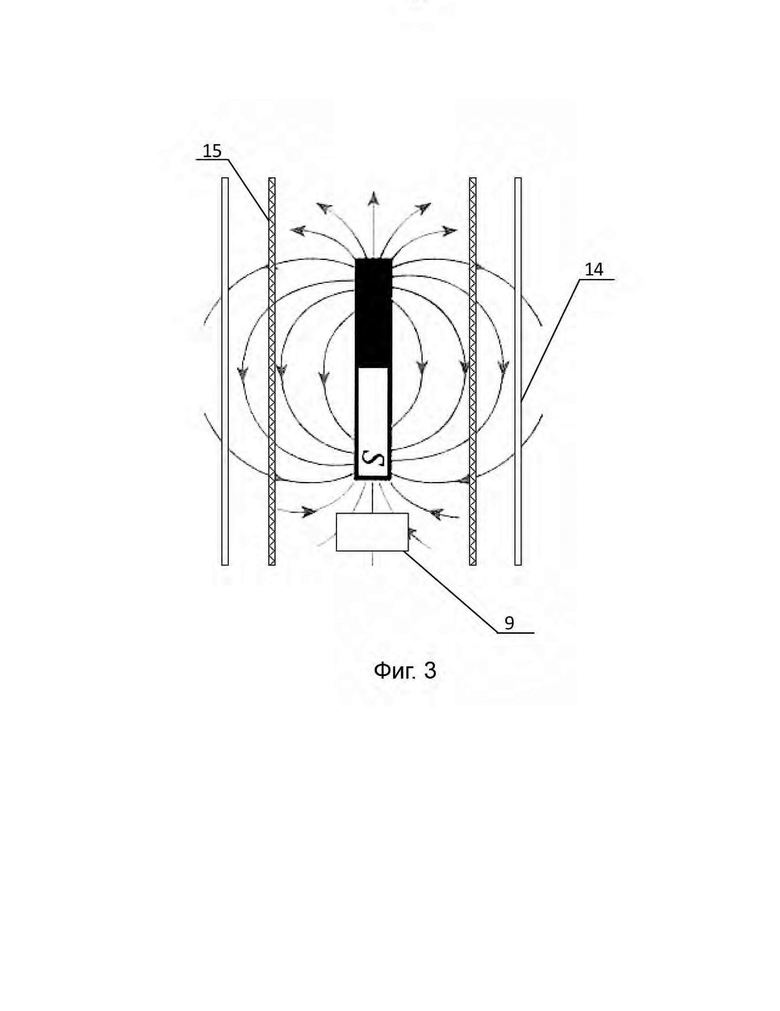
На Фиг. 3 показан принцип электромагнитного каротажа с одной передающей катушкой в известном уровне техники.
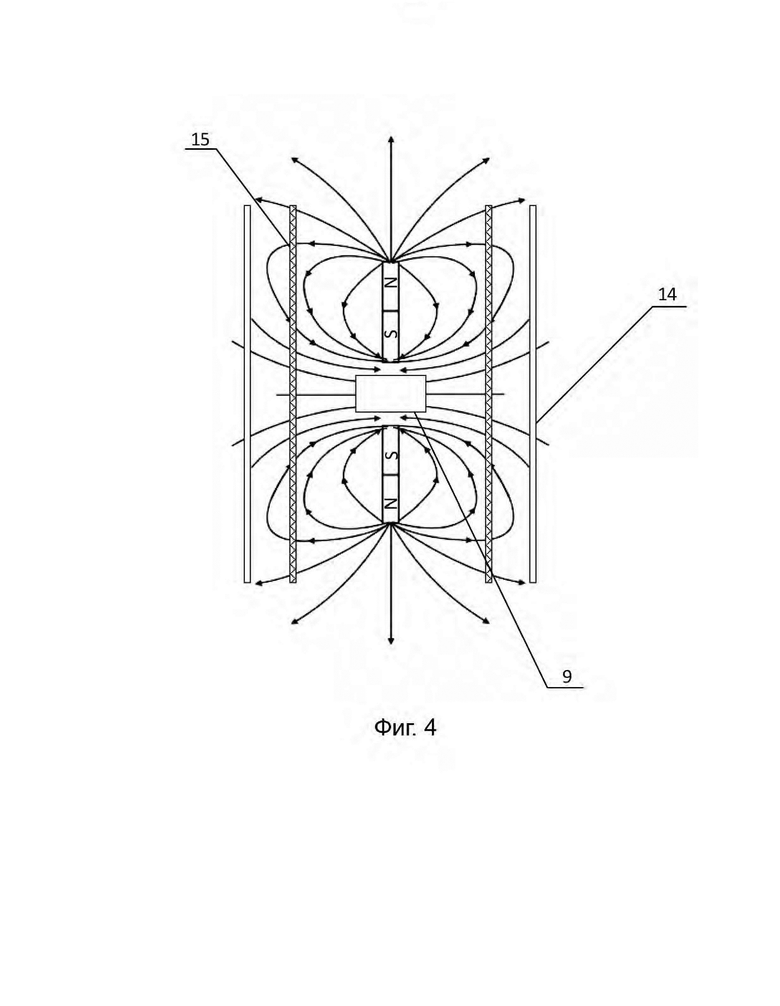
На Фиг. 4 показан принцип электромагнитного каротажа с двумя передающими катушками в соответствии с данным изобретением.
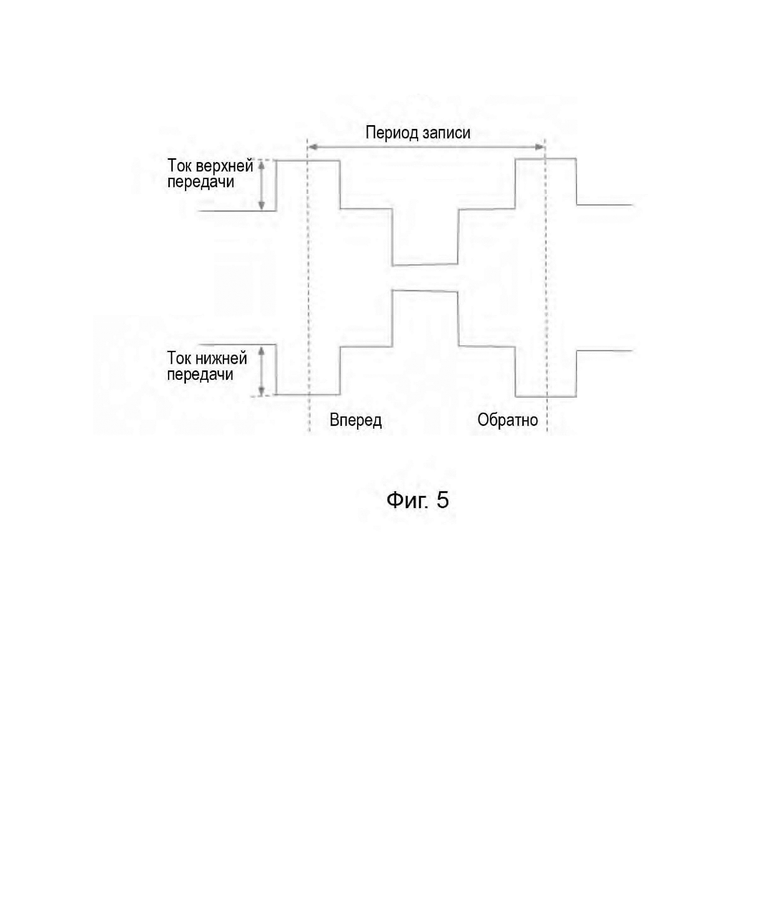
На Фиг. 5 показана форма волны периодического сигнала возбуждения квадратной волны передающей системы в соответствии с данным изобретением.
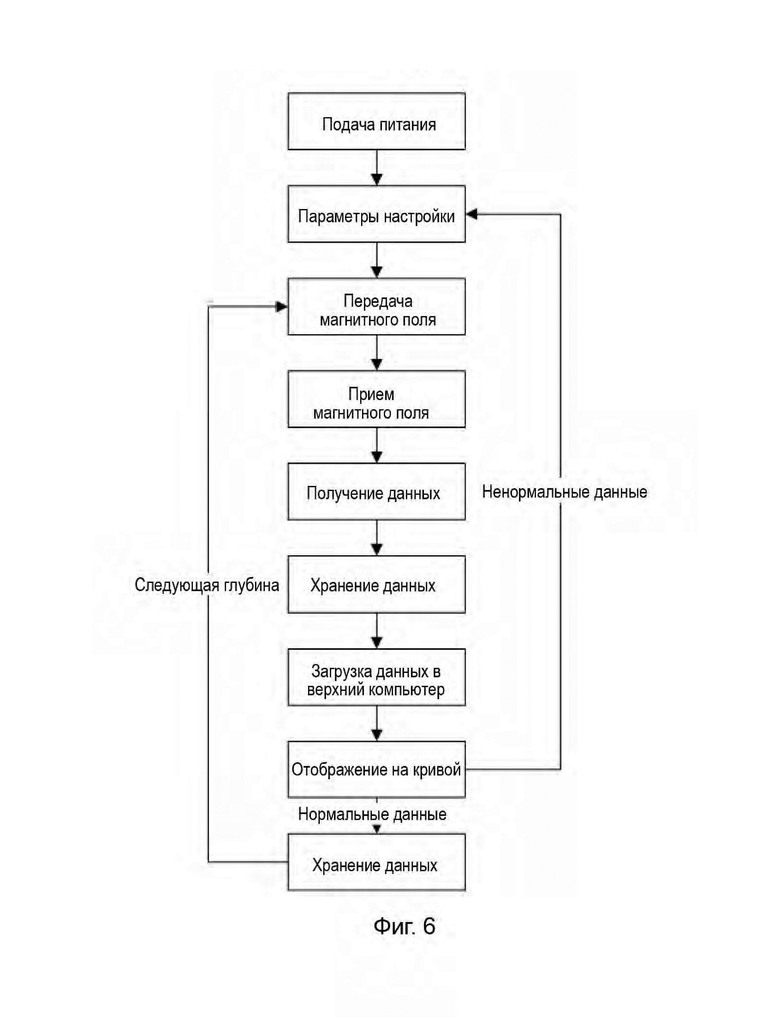
Фиг. 6 представляет собой блок-схему выявления дефектов скважинным электромагнитным каротажным инструментом в соответствии с данным изобретением.
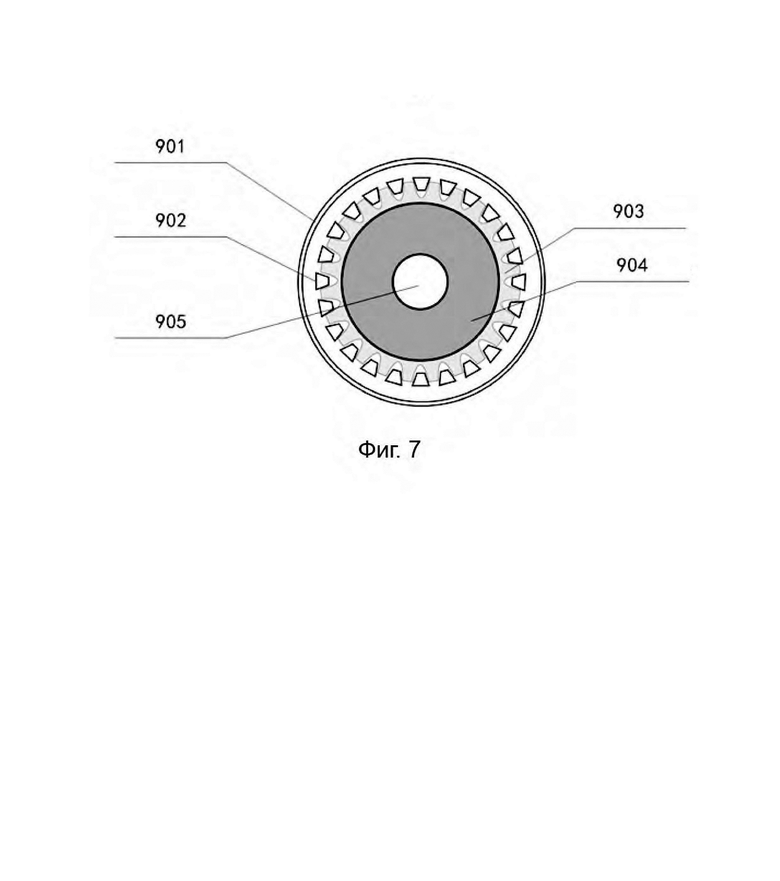
На Фиг. 7 схематически показана структура поворотной матрицы датчиков магнитного поля в соответствии с данным изобретением.
Числовые обозначения в графических материалах:
1 верхний компьютер;
2 кабель питания и данных;
3 скважинный электромагнитный каротажный инструмент;
4 процессор DSP;
5 корпус инструмента;
6 гидравлический центратор;
7 естественный гамма-зонд;
8 модуль регистрации траектории движения;
9 матрица датчиков магнитного поля;
10 датчик температуры;
11 модуль силового привода;
12 верхняя передающая катушка;
13 нижняя передающая катушка;
14 обсадная колонна;
15 насосно-компрессорные трубы;
901 оболочка матрицы датчиков магнитного поля;
902 датчик магнитного поля;
903 монтажный кронштейн для крепления датчиков магнитного поля;
904 немагнитный каркас; и
905 вращающийся шаговый двигатель.
Подробное описание вариантов реализации изобретения
Вариант реализации изобретения 1 скважинного электромагнитного каротажного инструмента
Скважинный электромагнитный каротажный инструмент используется для выявления дефектов формы обсадной колонны. Как показано на Фиг. 1, для отображения результатов выявления дефектов скважинный электромагнитный каротажный инструмент 3 посылает обнаруженные данные на верхний компьютер 1, расположенный на поверхности, через кабель питания и данных 2. Верхний компьютер 1 отображает данные в виде кривой и определяет, можно ли продолжать использовать обсадную колонну. Кроме того, верхний компьютер 1 подает питание на скважинный электромагнитный каротажный инструмент 3, а также посылает на него команды управления.
Как показано на Фиг. 2, скважинный электромагнитный каротажный инструмент включает в себя по меньшей мере передающую систему для создания магнитного поля, матрицу датчиков магнитного поля для приема вторичного магнитного поля и модуль управления. Передающая система и матрица датчиков магнитного поля соединены с модулем управления. Передающая система включает верхнюю передающую катушку и нижнюю передающую катушку. Верхняя передающая катушка и нижняя передающая катушка расположены выше и ниже матрицы датчиков магнитного поля, соответственно, и генерируют магнитные поля с противоположными полярностями и противоположными направлениями, так что магнитные поля в разных направлениях концентрируются в месте расположения матрицы датчиков магнитного поля на основе принципа однополярного отталкивания. Затем матрица датчиков магнитного поля принимает вторичное магнитное поле для завершения выявления дефектов на обсадной колонне.
В скважинном электромагнитном каротажном инструменте, предлагаемом в варианте реализации изобретения, согласно данному изобретению, когда магнитные поля, генерируемые верхней и нижней передающими катушками, направлены в противоположные стороны, полярность одного конца верхней передающей катушки, расположенного вблизи матрицы датчиков магнитного поля, совпадает с полярностью одного конца нижней передающей катушки, расположенного вблизи матрицы датчиков магнитного поля. Согласно принципу однополярного отталкивания, магнитные поля более концентрированы в точке выявления дефектов, и магнитные поля будут сконцентрированы на обсадной колонне с большим радиусом после прохождения через насосно-компрессорные трубы, так что магнитное поле, сформированное на обсадной колонне, может быть сконцентрировано, что указывает на усиление силы магнитного поля в целом. Поэтому, когда верхняя передающая катушка и нижняя передающая катушка выключены, обсадная колонна будет генерировать большее вторичное магнитное поле, которое несет больше информации об обсадной колонне для приема матрицей датчиков магнитного поля. Поскольку информация об обсадной колонне передается в большем объеме, форма обсадной колонны может быть определена более точно, что позволяет достичь более точного выявления дефектов обсадной колонны.
В частности, если обратиться к Фиг. 2, скважинный электромагнитный каротажный инструмент 3 включает процессор DSP 4 (т.е. модуль управления), корпус инструмента 5, гидравлический центратор 6, естественный гамма-зонд 7, модуль записи траектории движения 8, матрицу датчиков магнитного поля 9, датчик температуры 10, модуль силового привода 11, верхнюю передающую катушку 12 и нижнюю передающую катушку 13. Кроме того, процессор DSP 4, естественный гамма-датчик 7, модуль записи траектории движения 8, модуль силового привода 11, верхняя передающая катушка 12, матрица датчиков магнитного поля 9, нижняя передающая катушка 13 и датчик температуры 10 расположены внутри корпуса инструмента 5 в таком порядке. Каждый конец корпуса инструмента 5 снабжен гидравлическим центратором 6, который используется для центрирования скважинного электромагнитного каротажного инструмента 3, а также для облегчения размещения и извлечения инструмента. Предпочтительно, гидравлический центратор 6 представляет собой шестиплечий роликовый гидравлический центратор.
Далее, верхняя передающая катушка 12 и нижняя передающая катушка 13 составляют передающую систему и расположены над и под матрицей датчиков магнитного поля 9, соответственно. Верхняя передающая катушка 12 и нижняя передающая катушка 13 находятся в связи с процессором DSP 4 через модуль силового привода 11, и каждый датчик магнитного поля в матрице датчиков магнитного поля 9 находится в связи с процессором DSP 4. Кроме того, естественный гамма-датчик 7, модуль регистрации траектории движения 8 и температурный датчик 10 находятся в связи с процессором DSP 4.
Модуль силового привода 11 используется для получения инструкций от процессора DSP 4 и подачи тока на верхнюю передающую катушку 12 и нижнюю передающую катушку 13. Матрица датчиков магнитного поля 9 посылает полученное вторичное магнитное поле в процессор DSP 4. Кроме того, естественный гамма-датчик 7, модуль регистрации траектории движения 8 и датчик температуры 10 передают соответствующую информацию в процессор DSP 4. В это время процессор DSP 4 сохраняет полученную информацию и загружает ее в верхний компьютер 1.
Ссылаясь на Фиг. 3, согласно принципу выявления дефектов в известном уровне техники, используется только одна передающая катушка. В этом случае создаваемое магнитное поле относительно рассеяно (известно, что линии магнитного поля плотные, когда напряженность магнитного поля велика, и разреженные, когда напряженность магнитного поля мала), а также относительно разрежено. Когда магнитное поле сталкивается с обсадной колонной 14 после проникновения через насосно-компрессорные трубы 15, большая часть магнитного поля не может быть сфокусирована на обсадной колонне 14 после проникновения через насосно-компрессорные трубы 15, поэтому информация о вторичном магнитном поле, генерируемом обсадной колонной 14, является крайне неполной, что не позволяет точно определить степень износа обсадной колонны 14. Поэтому основная концепция скважинного электромагнитного каротажного инструмента 3 в соответствии с данным изобретением предполагает расположение верхней передающей катушки 12 и нижней передающей катушки 13 на обоих концах матрицы датчиков магнитного поля 9, соответственно, посредством чего может быть достигнуто выявления дефектов на обсадной колонне 14.
Как показано на Фиг. 4, в соответствии с принципом выявления дефектов по данному изобретению, модуль силового привода 11 подает прямоугольные длиннопериодные (например, 500-1000 мс) импульсные токи с одинаковым размером, но противоположными направлениями на верхнюю передающую катушку 12 и нижнюю передающую катушку 13 одновременно, так что верхняя передающая катушка 12 и нижняя передающая катушка 13 генерируют магнитные поля с противоположными полярностями и противоположными направлениями. Из графических материалов видно, что линии магнитного поля являются плотными в месте расположения матрицы датчиков магнитного поля 9. Более того, исходя из принципа однополярного отталкивания, магнитные поля, создаваемые верхней передающей катушкой 12 и нижней передающей катушкой 13, проходят через насосно-компрессорные трубы 15 с соответствующими большими радиусами, а затем фокусируются на обсадной колонне 14. Таким образом, обсадная колонна 14 может генерировать большее вторичное магнитное поле, которое несет больше информации об обсадной колонне.
В передающей системе верхняя передающая катушка 12 и нижняя передающая катушка 13 представляют собой магнитный цилиндр, каждый из которых обмотан низкоомным изоляционным кабелем из многовитковых замкнутых катушек, в основном для передачи вертикального магнитного поля. Длина каждой намотанной катушки составляет 0,5 м, а ее эффективная площадь составляет 100 м2. Процессор DSP 4 подает периодический возбуждающий сигнал, имеющий форму квадратной волны, как показано на Фиг. 5, на верхнюю передающую катушку 12 и нижнюю передающую катушку 13 через модуль силового привода 11, при этом период записи включает одно прямое затухание и одно обратное затухание, обычно от 500 мс до 1000 мс, чтобы компенсировать эффект намагничивания насосно-компрессорных труб и обсадной колонны. Ток передачи устанавливается пользователем с помощью команды верхнего компьютера 1, при этом ток прямой передачи такой же, как и ток обратной передачи, обычно от 40 А до 100 А. Управляющий тактовый сигнал, выдаваемый процессором DSP 4, управляет переключателем постоянного тока модуля силового привода 11, чтобы управлять включением или выключением верхней передающей катушки 12 и нижней передающей катушки 13. Если выходной сигнал процессора DSP 4 равен 0, модуль силового привода 11 выключает приводной ток; если выходной сигнал процессора DSP 4 равен 1, модуль силового привода 11 включает приводной ток в прямом направлении; и если выходной сигнал процессора DSP 4 равен -1, модуль силового привода 11 включает приводной ток в обратном направлении.
Далее, матрица датчиков магнитного поля 9 содержит корпус матрицы датчиков магнитного поля, 24 датчика магнитного поля, монтажный кронштейн для крепления датчиков магнитного поля и немагнитный каркас. Корпус матрицы датчиков магнитного поля является цилиндрическим, а немагнитный каркас коаксиально расположен в цилиндрическом корпусе. Для крепления датчиков магнитного поля в варианте реализации данного изобретения немагнитный каркас снабжен монтажным кронштейном для крепления датчиков магнитного поля. Монтажный кронштейн для крепления датчиков магнитного поля имеет 24 паза, каждый из которых по форме соответствует одному из датчиков магнитного поля, так что датчики магнитного поля могут быть более прочно закреплены в соответствующих пазах.
Далее, каждый датчик магнитного поля соединен с процессором DSP 4 и отвечает за прием магнитного поля соответствующего угла. Процессор DSP 4 посылает инструкцию синхронного сбора на каждый датчик магнитного поля, чтобы реализовать сбор вторичного магнитного поля. В случае 24 датчиков магнитного поля, поскольку 360°/24=15°, матрица датчиков магнитного поля 9 имеет разрешение 15°.
Датчик температуры 10 фиксирует температуру жидкости в стволе скважины, что может быть использовано для оценки повреждения обсадной колонны и утечки жидкости. Естественный гамма-зонд 7 используют для коррекции глубины скважинного электромагнитного каротажного инструмента 3. Модуль записи траектории движения 8 используют для записи траектории движения скважинного электромагнитного каротажного инструмента 3.
Как показано на Фиг. 6, процедура работы скважинного электромагнитного каротажного инструмента 3 выглядит следующим образом.
1) Верхний компьютер 1 подает питание на скважинный электромагнитный каротажный инструмент 3 и устанавливает его параметры.
2) После того как скважинный электромагнитный каротажный инструмент 3 опускается в точку измерения определенной глубины, процессор DSP 4 получает команду от верхнего компьютера 1 начать передачу электромагнитного поля. В частности, процессор DSP 4 посылает периодические сигналы возбуждения квадратной волны, как показано на Фиг. 5, на верхнюю передающую катушку 12 и нижнюю передающую катушку 13 через модуль силового привода 11, тем самым управляя включением или выключением верхней передающей катушки 12 и нижней передающей катушки 13.
Когда верхняя передающая катушка 12 и нижняя передающая катушка 13 включены, через них протекают токи одинаковой величины, но противоположных направлений, создавая магнитные поля с противоположными полярностями. Магнитные поля фокусируются на обсадной колонне 14 после прохождения через насосно-компрессорные трубы 15. Когда верхняя передающая катушка 12 и нижняя передающая катушка 13 выключены, обсадная колонна 14 генерирует вторичное магнитное поле, а процессор DSP 4 посылает общий тактовый сигнал для управления каждым датчиком в матрице датчиков магнитного поля 9 для синхронного получения электрических сигналов. Матрица датчиков магнитного поля 9 действует как приемник для приема индуцированной электродвижущей силы, создаваемой вторичным магнитным полем, индуцированным вихретоковым электрическим полем в каждом секторе стенки обсадной колонны, а процессор DSP 4 обрабатывает и сохраняет информацию, полученную матрицей датчиков магнитного поля 9.
Когда процессор DSP 4 начинает записывать информацию, полученную матрицей датчиков магнитного поля 9, процессор DSP 4 также записывает информацию, полученную модулем записи траектории движения 8, информацию, полученную естественным гамма-зондом 7, сигнал, полученный датчиком температуры 10, и информацию о передающем токе, отправленную модулем силового привода 11.
В дополнение к управлению последовательностью операций, процессор DSP 4 дополнительно получает сигнал естественного гамма-излучения, сигнал траектории движения и сигнал температуры, а также управляет передачей мощности, одновременно управляя датчиками 902 для выполнения синхронного сбора данных.
3) Скважинный электромагнитный каротажный инструмент 3 сохраняет текущий пакет данных в процессоре DSP 4 и ожидает команды выгрузки от верхнего компьютера 1.
4) После того, как процессор DSP 4 получает команду выгрузки, он отправляет сохраненный пакет данных на верхний компьютер 1.
5) Верхний компьютер 1 анализирует полученные пакеты данных и отображает данные в виде кривой.
6) Верхний компьютер 1 автоматически определяет, являются ли данные аномальными или нормальными в соответствии с заданными условиями определения. Если данные ненормальные, верхний компьютер предлагает пользователю изменить настройки, а затем снова провести измерение; если данные нормальные, пакет данных сохраняется.
7) После сохранения пакета данных измерение проводится для точки измерения на следующей глубине.
В приведенном выше варианте реализации изобретения процессор DSP 4 управляет датчиками магнитного поля в матрице датчиков магнитного поля 9 для синхронного приема вторичного магнитного поля, чтобы завершить выявление дефектов. В качестве другого варианта реализации изобретения процессор DSP 4 может также управлять датчиками магнитного поля в матрице датчиков магнитного поля 9 для приема вторичного магнитного поля в заранее определенной временной последовательности. В данном изобретении способ приема вторичного магнитного поля матрицей датчиков магнитного поля 9 не ограничен.
В вышеописанном варианте реализации изобретения, чтобы удобно управлять верхней передающей катушкой 12 и нижней передающей катушкой 13, процессор DSP 4 управляет и контролирует верхнюю передающую катушку 12 и нижнюю передающую катушку 13 через модуль силового привода 11. В качестве другого способа реализации изобретения контроллер 4 может также управлять верхней передающей катушкой 12 и нижней передающей катушкой 13 напрямую.
В вышеуказанном варианте реализации изобретения, чтобы помочь работе скважинного электромагнитного каротажного инструмента 3, скважинный электромагнитный каротажный инструмент 3 дополнительно включает модуль регистрации траектории движения 8, естественный гамма-зонд 7 и датчик температуры 10. Однако ключевым моментом данного изобретения является расположение двух передающих катушек, так что модуль регистрации траектории движения 8, естественный гамма-зонд 7 и датчик температуры 10 могут быть опущены, пока может быть реализовано основное выявление дефектов.
В приведенном выше варианте реализации изобретения гидравлический центратор 6 функционирует для облегчения установки и извлечения скважинного электромагнитного каротажного инструмента 3 и регулировки его положения. В другом варианте реализации изобретения гидравлический центратор 6 может быть опущен, если нет необходимости учитывать положение скважинного электромагнитного каротажного инструмента 3.
Согласно данному изобретению, с двумя передающими катушками, расположенными соответственно выше и ниже матрицы датчиков магнитного поля 9, магнитные поля, генерируемые передающей системой, могут быть сфокусированы на обсадной колонне 14 с большим радиусом. Соответственно, вторичное магнитное поле, создаваемое обсадной колонной 14, плотнее и, таким образом, несет больше информации об обсадной колонне, что повышает точность выявления дефектов.
Вариант реализации изобретения 2 скважинного электромагнитного каротажного инструмента
Скважинный электромагнитный каротажный инструмент, предложенный в варианте реализации изобретения 2, отличается от варианта реализации изобретения 1 тем, что матрица датчиков магнитного поля 9 представляет собой поворотную матрицу датчиков магнитного поля 9. Поэтому, благодаря вращению матрицы датчиков магнитного поля 9, разрешение матрицы датчиков магнитного поля 9 может быть улучшено, таким образом, минимизируя слепые зоны выявления дефектов, вызванные углом между двумя соседними датчиками, и реализуя прием сигнала магнитного поля на 360°.
В частности, как показано на Фиг. 7, поворотная матрица датчиков магнитного поля 9, содержит корпус 901, 24 датчика магнитного поля 902, монтажный кронштейн для крепления датчиков магнитного поля 903, немагнитный каркас 904 и вращающийся шаговый двигатель 905. Корпус матрицы датчиков магнитного поля 901 является цилиндрическим, вдоль оси которого установлен поворотный шаговый двигатель 905. Ось цилиндрической оболочки параллельна оси корпуса инструмента 5, а немагнитный каркас 904 установлен на вращающемся валу вращающегося шагового двигателя 905. На немагнитном каркасе 904 имеется монтажный кронштейн 903 для крепления датчиков магнитного поля 902. Монтажный кронштейн для крепления датчиков магнитного поля 903 имеет 24 паза, каждый из которых по форме соответствует одному из датчиков магнитного поля 902, так что каждый датчик магнитного поля 902 может быть более прочно закреплен в соответствующем пазу.
Далее, каждый датчик магнитного поля 902 и вращающийся шаговый двигатель 905 подключены к процессору DSP 4, и каждый датчик магнитного поля 902 отвечает за прием магнитного поля соответствующего угла. Процессор DSP 4 посылает команду синхронного сбора данных на каждый датчик магнитного поля 902, и в то же время посылает команду вращения на вращающийся шаговый двигатель 905. Вращающийся шаговый двигатель 905 может приводить указанные 24 датчика магнитного поля 902 во вращение вокруг осевого направления. Поскольку матрица датчиков магнитного поля 9 получает информацию о магнитном поле вращающимся образом, слепые зоны выявления дефектов могут быть уменьшены.
Например: поскольку окружность равна 360°, а 360°/24=15° для 24 датчиков магнитного поля 902, матрица датчиков магнитного поля 9 имеет разрешение 15°. Соответственно, существует слепая зона захвата 15°. Вращающийся шаговый двигатель 905 может, под управлением процессора DSP 4, поворачиваться на угол не менее 1°. Поэтому матрица датчиков магнитного поля 9 имеет угловое разрешение 1°. Таким образом, точное выявление дефектов 1° вдоль окружного направления может быть реализовано после 15 раз вращения, так что слепая зона выявления дефектов, вызванная углом между двумя соседними датчиками, может быть исключена, таким образом, реализуя прием 360° вдоль окружного направления для передаваемого сигнала магнитного поля.
Выше подробно описана конкретная структура матрицы датчиков магнитного поля 9. Однако в вариантах реализации данного изобретения конкретная структура матрицы датчиков магнитного поля 9 не ограничивается, до тех пор, пока датчики магнитного поля могут образовывать заданную матрицу для приема магнитного поля.
Другие структуры и соединения скважинного электромагнитного каротажного инструмента 3 в варианте реализации изобретения 2 такие же, как у скважинного электромагнитного каротажного инструмента 3 в варианте реализации изобретения 1, и поэтому они не будут повторяться в данном документе, поскольку они были представлены в варианте реализации изобретения 1.
Таким образом, процедура работы скважинного электромагнитного каротажного инструмента 3 в варианте реализации изобретения 2 выглядит следующим образом.
1) Верхний компьютер 1 подает питание на скважинный электромагнитный каротажный инструмент 3 и устанавливает его параметры.
2) После того как скважинный электромагнитный каротажный инструмент 3 опускается в точку измерения определенной глубины, процессор DSP 4 получает команду от верхнего компьютера 1 начать передачу электромагнитного поля. В частности, процессор DSP 4 посылает периодические сигналы возбуждения квадратной волны, как показано на Фиг. 5, на верхнюю передающую катушку 12 и нижнюю передающую катушку 13 через модуль силового привода 11, тем самым управляя включением или выключением верхней передающей катушки 12 и нижней передающей катушки 13.
Когда верхняя передающая катушка 12 и нижняя передающая катушка 13 включены, через них протекают токи одинаковой величины, но противоположных направлений, создавая магнитные поля с противоположными полярностями. Магнитные поля фокусируются на обсадной колонне 14 после прохождения через насосно-компрессорные трубы 15. Когда верхняя передающая катушка 12 и нижняя передающая катушка 13 выключены, обсадная колонна 14 генерирует вторичное магнитное поле, а процессор DSP 4 посылает общий тактовый сигнал для управления каждым датчиком 902 в матрице датчиков магнитного поля 9 для синхронного получения электрических сигналов и управляет сигналами вращения матрицы датчиков магнитного поля 9 для включения матрицы датчиков магнитного поля 9. Матрица датчиков магнитного поля 9 действует как приемник для приема индуцированной электродвижущей силы, создаваемой вторичным магнитным полем, индуцированным вихретоковым электрическим полем в каждом секторе стенки обсадной колонны, а процессор DSP 4 обрабатывает и сохраняет информацию, полученную матрицей датчиков магнитного поля 9.
Когда процессор DSP 4 начинает записывать информацию, полученную матрицей датчиков магнитного поля 9, процессор DSP 4 также записывает информацию, полученную модулем записи траектории движения 8, информацию, полученную естественным гамма-зондом 7, сигнал, полученный датчиком температуры 10, и информацию о передающем токе, отправленную модулем силового привода 11.
В дополнение к управлению последовательностью операций, процессор DSP 4 также получает сигнал естественного гамма-излучения, сигнал траектории движения и сигнал температуры, а также управляет передачей мощности, одновременно управляя датчиками 902 для выполнения синхронного сбора данных.
3) Скважинный электромагнитный каротажный инструмент 3 сохраняет текущий пакет данных в процессоре DSP 4 и ожидает команды выгрузки от верхнего компьютера 1.
4) После того, как процессор DSP 4 получает команду выгрузки, он отправляет сохраненный пакет данных на верхний компьютер 1.
5) Верхний компьютер 1 анализирует полученные пакеты данных и отображает данные в виде кривой.
6) Верхний компьютер 1 автоматически определяет, являются ли данные аномальными или нормальными в соответствии с заданными условиями выявления дефектов. Если данные ненормальные, верхний компьютер предлагает пользователю изменить настройки, а затем снова провести измерение; если данные нормальные, пакет данных сохраняется.
7) После сохранения пакета данных измерение проводится для точки измерения на следующей глубине.
Вариант реализации изобретения 3 скважинного электромагнитного каротажного инструмента
Скважинный электромагнитный каротажный инструмент, предлагаемый в варианте реализации изобретения 3, отличается от инструмента, предлагаемого в варианте реализации изобретения 1, следующим образом. Две катушки передающей системы в варианте реализации изобретения 1 намотаны одинаково, поэтому магнитные поля, создаваемые токами, протекающими через две катушки с одинаковой величиной, но противоположными направлениями, будут иметь противоположные полярности. Однако в варианте реализации изобретения 3 две катушки передающей системы намотаны противоположным образом, так что магнитные поля, создаваемые токами, протекающими через две катушки с одинаковой величиной и одинаковым направлением, также будут иметь противоположные полярности. То есть, концы двух катушек, расположенные вблизи матрицы датчика магнитного поля 9, имеют одинаковую полярность.
Другие структуры, соединения и порядок работы скважинного электромагнитного каротажного инструмента по варианту реализации изобретения 3 являются такими же, как и у скважинного электромагнитного каротажного инструмента по варианту реализации изобретения 1, и не будут повторяться в данном случае.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМАГНИТНЫЙ СКВАЖИННЫЙ ДЕФЕКТОСКОП | 2008 |
|
RU2372478C1 |
| Электромагнитно-акустический интроскоп для диагностического обследования обсадных колонн и насосно-компрессорных труб скважин | 2020 |
|
RU2737226C1 |
| УСТРОЙСТВО И СПОСОБ ОБНАРУЖЕНИЯ СИГНАЛА, АССОЦИИРОВАННОГО С КОМПОНЕНТОМ | 2006 |
|
RU2407886C2 |
| СПОСОБ И УСТАНОВКА ДЛЯ УДАЛЕНИЯ ДВОЙНОЙ ИНДИКАЦИИ ДЕФЕКТОВ ПРИ КОНТРОЛЕ ТРУБ ПО ДАЛЬНЕМУ ПОЛЮ ВИХРЕВЫХ ТОКОВ | 2010 |
|
RU2523603C2 |
| Комплексная аппаратура для исследования нефтегазовых скважин и способ регистрации полученных данных | 2016 |
|
RU2624144C1 |
| ЭЛЕКТРОМАГНИТНЫЙ МНОГОСЕКТОРНЫЙ ДЕФЕКТОСКОП | 2016 |
|
RU2622509C1 |
| СПОСОБ ЭЛЕКТРОМАГНИТНОЙ ДЕФЕКТОСКОПИИ В МНОГОКОЛОННЫХ СКВАЖИНАХ И ЭЛЕКТРОМАГНИТНЫЙ СКВАЖИННЫЙ ДЕФЕКТОСКОП | 2012 |
|
RU2507393C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ОБСАДНЫХ КОЛОНН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2134779C1 |
| РАЗВЕРТЫВАНИЕ ПОДЗЕМНЫХ ДАТЧИКОВ В ОБСАДНОЙ КОЛОННЕ | 2005 |
|
RU2374441C2 |
| СПОСОБ ЭЛЕКТРОМАГНИТНОЙ ДЕФЕКТОСКОПИИ-ТОЛЩИНОМЕТРИИ МНОГОКОЛОННЫХ СКВАЖИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2468197C1 |
Изобретение к каротажному оборудованию в области нефтегазового промыслового машиностроения. Техническим результатом является повышение точности измерений электромагнитным каротажным инструментом. Заявлен скважинный электромагнитный каротажный инструмент, содержащий передающую систему для создания магнитного поля, матрицу датчиков магнитного поля для приема вторичного магнитного поля и модуль управления, соединенный с передающей системой и матрицей датчиков магнитного поля. При этом передающая система содержит верхнюю передающую катушку и нижнюю передающую катушку, расположенные над и под матрицей датчиков магнитного поля, соответственно, для создания магнитных полей с противоположными полярностями и противоположными направлениями. Магнитные поля с разными направлениями, создаваемые верхней и нижней передающими катушками, концентрируются, согласно принципу однополярного отталкивания, в месте, где расположена матрица датчиков магнитного поля. Причем матрица датчиков магнитного поля принимает вторичное магнитное поле для завершения выявления дефектов на обсадной колонне. При этом матрица датчиков магнитного поля представляет собой поворотную матрицу датчиков магнитного поля, а скважинный электромагнитный каротажный инструмент дополнительно содержит приводное устройство для приведения во вращение матрицы датчиков магнитного поля. Причем приводное устройство соединено с модулем управления, который управляет вращением поворотной матрицы датчиков магнитного поля с помощью приводного устройства для уменьшения слепой зоны выявления дефектов. 8 з.п. ф-лы, 7 ил.
1. Скважинный электромагнитный каротажный инструмент, содержащий передающую систему для создания магнитного поля, матрицу датчиков магнитного поля для приема вторичного магнитного поля и модуль управления, соединенный с передающей системой и матрицей датчиков магнитного поля,
при этом передающая система содержит верхнюю передающую катушку и нижнюю передающую катушку, расположенные над и под матрицей датчиков магнитного поля, соответственно, для создания магнитных полей с противоположными полярностями и противоположными направлениями, так что магнитные поля с разными направлениями, создаваемые верхней и нижней передающими катушками, концентрируются, согласно принципу однополярного отталкивания, в месте, где расположена матрица датчиков магнитного поля, причем матрица датчиков магнитного поля принимает вторичное магнитное поле для завершения выявления дефектов на обсадной колонне, и
при этом матрица датчиков магнитного поля представляет собой поворотную матрицу датчиков магнитного поля, а скважинный электромагнитный каротажный инструмент дополнительно содержит приводное устройство для приведения во вращение матрицы датчиков магнитного поля, причем приводное устройство соединено с модулем управления, который управляет вращением поворотной матрицы датчиков магнитного поля с помощью приводного устройства для уменьшения слепой зоны выявления дефектов.
2. Скважинный электромагнитный каротажный инструмент по п. 1, отличающийся тем, что верхняя передающая катушка и нижняя передающая катушка намотаны одинаково, так что магнитные поля с противоположными полярностями генерируются токами одинаковой величины, но противоположных направлений, протекающими в катушках.
3. Скважинный электромагнитный каротажный инструмент по п. 1 или 2, отличающийся тем, что каждая из верхней передающей катушки и нижней передающей катушки содержит магнитный цилиндр, намотанный низкоомным изолирующим кабелем из многовитковых замкнутых катушек.
4. Скважинный электромагнитный каротажный инструмент по п. 1, дополнительно содержащий модуль силового привода, при этом модуль управления соединен с верхней передающей катушкой и нижней передающей катушкой через модуль силового привода.
5. Скважинный электромагнитный каротажный инструмент по п. 1, отличающийся тем, что приводное устройство представляет собой вращающийся шаговый двигатель.
6. Скважинный электромагнитный каротажный инструмент по п. 1, отличающийся тем, что матрица датчиков магнитного поля содержит корпус матрицы датчиков магнитного поля, по меньшей мере два датчика магнитного поля, монтажный кронштейн для крепления датчиков и немагнитный каркас для крепления монтажного кронштейна.
7. Скважинный электромагнитный каротажный инструмент по п. 1, отличающийся тем, что матрица датчиков магнитного поля содержит корпус матрицы датчиков магнитного поля, по меньшей мере два датчика магнитного поля, монтажный кронштейн для крепления датчиков и немагнитный каркас для крепления монтажного кронштейна, причем немагнитный каркас установлен на вращающийся вал приводного устройства.
8. Скважинный электромагнитный каротажный инструмент по п. 1, отличающийся тем, что скважинный электромагнитный каротажный инструмент дополнительно содержит естественный гамма-зонд, модуль регистрации траектории движения и датчик температуры, причем
естественный гамма-зонд, модуль регистрации траектории движения и датчик температуры соединены с модулем управления, а передающая система, матрица датчиков магнитного поля, модуль управления, естественный гамма-зонд, модуль регистрации траектории движения и датчик температуры расположены в корпусе инструмента.
9. Скважинный электромагнитный каротажный инструмент по п. 8, отличающийся тем, что на каждом конце корпуса инструмента обеспечен центратор.
| US 20160187523 A1, 30.06.2016 | |||
| US 20170329035 A1, 16.11.2017 | |||
| US 5130706 A, 14.07.1992 | |||
| US 20130113468 A1, 09.05.2013 | |||
| US 20200088904 A1, 19.03.2020 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ КАРОТАЖА С ИСПОЛЬЗОВАНИЕМ СИНФАЗНОЙ СОСТАВЛЯЮЩЕЙ МАГНИТНОГО ПОЛЯ ПО РЕЗУЛЬТАТАМ МНОГОКОМПОНЕНТНЫХ ИЗМЕРЕНИЙ УДЕЛЬНОГО СОПРОТИВЛЕНИЯ | 2004 |
|
RU2383038C2 |
| Способ регенерации резин | 1959 |
|
SU138022A1 |

