Изобретение относится к физиотерапевтическим приборам, а именно, к медицинским лечебно-профилактическим низкочастотным магнитоимпульсным приборам для проведения лечебной и общей стимуляции (массажа) тканей посредством электромагнитной индукции, что позволяет предотвращать и лечить соматические заболевания и нарушение опорнодвигательной системы.
Известны аналогичные магнитоимпульсные приборы, например, массажер неконтактный тканей организма (см. патент РФ №2200038), физиотерапевтическое устройство со сканирующим магнитным полем (см. патент РФ №2141855), устройство для магнитотерапевтического воздействия на человеческий организм (см. патент РФ №2768467, опубл.2022 г.) и др.
Общим недостатком известных устройств является отсутствие возможности безопасно проводить процедуру малоподвижным пациентам с избыточным весом по всей длине тела, а также отсутствие плавной регулировки мощности устройства и частоты.
Наиболее близким по технической сущности к заявленному изобретению, прототипом, является магнитотерапевтический аппарат (см. патент РФ на полезную модель №221 528, опубл.2023 г), состоящий из каркаса со столешницей, выполненной с возможностью пропускания электромагнитного поля, внутри которого расположен индуктор магнитного поля, выполненный с возможностью соединения с генератором и установленный на подвижном модуле, выполненном с возможностью поступательного движения посредством привода вдоль направляющего узла, зафиксированного внутри каркаса, направляющий узел состоит из зафиксированных направляющих стержней, расположенных в отверстиях подвижного модуля с возможностью подвижного соединения. Направляющие стержни установлены вдоль каркаса. Направляющие стержни и отверстия подвижного модуля выполнены с одинаковым круглым поперечным сечением или с одинаковым овальным поперечным сечением. В отверстиях подвижного модуля установлены втулки с линейными подшипниками. Подвижный модуль содержит соединённые раму, на которой установлена подложка индуктора магнитного поля, и расположенную под ней каретку. Рама выполнена с возможностью регулировки её угла наклона и высоты расположения над кареткой посредством более одного узла регулировки. Узел регулировки выполнен в виде резьбовой шпильки с гайками. Рама и/или каретка выполнены из соединённых профилей. Профили выполнены в форме швеллера. Каретка оборудована двумя стопорными деталями, а два ответных им стопорных элемента установлены на каркасе и выполнены с возможностью ограничения движения каретки. Привод содержит мотор-редуктор, соединительную муфту, радиально-осевую опору, шарико-винтовую передачу и радиальную опору
Однако, прототип не предназначен для оказания услуг малоподвижным пациентам с избыточным весом по всей длине тела, а также нет возможности плавно регулировать силу воздействия импульса для подбора оптимального режима проведения процедуры.
Целью настоящего изобретения является создание конструктивного решения, направленного на расширение функциональных возможностей и улучшение эксплуатационных характеристик магнитотерапевтического аппарата.
Техническим результатом является повышение надёжности конструкции, предназначенной, в том числе, для оказания услуг малоподвижным пациентам с избыточным весом.
Технический результат достигается тем, что магнитотерапевтический аппарат, состоящий из каркаса с рабочей поверхностью, выполненной с возможностью пропускания электромагнитного поля, внутри каркаса расположен индуктор магнитного поля, выполненный с возможностью соединения с генератором и установленный на подвижном модуле, рабочая поверхность выполнена из, как минимум, двойного закаленного стекла, направляющие узла подвижного модуля индуктора выполнены рельсовыми и установлены непосредственно по всей длине рамы каркаса, индуктор выполнен с возможностью приведения в движение с помощью шагового двигателя и соединенной с ним шарико-винтовой передачи, причем аппарат выполнен с возможностью плавной регулировки мощности электромагнитной стимуляции за счет изменения напряжения заряда накопительной ёмкости колебательного контура индуктора посредством подачи управляющих сигналов с микроконтроллера на блок регулировки напряжения.
Содержит встроенную систему управления, состоящую из микрокомпьютера, соединённого с контроллером, для получения импульсного магнитного поля с плавной регулировкой параметров лечебной процедуры.
Рабочая поверхность выполнена из стекла триплекс.
Каркас выполнен из стали.
Линейные шариковые каретки закреплены угловым профилем непосредственно к основанию индуктора.
Рельсовые направляющие выполнены из металла и зафиксированных на каркасе с помощью винтового соединения.
Содержит корпус, состоящий из торцевых панелей и фронтальных панелей.
Рама представляет из себя сварную конструкцию, выполненную из профилей и листового металла.
Шаговый двигатель зафиксирован посредством кронштейна на каркасе.
Внутри каркаса расположен электронный блок, внутри которого расположены высоковольтная и низковольтная части электронного оборудования, которые выполняют функцию формирования импульса с необходимыми параметрами для индуктора, а также контролируют систему перемещения модуля индуктора, систему световой индикации положения индуктора, систему обеспечивающую беспроводное управление аппаратом как посредством планшетного компьютера, так и с помощью радиопульта.
Выполнение рабочей поверхности из, как минимум, двойного закаленного стекла, которое способно выдержать вес пациента, позволяет повысить надёжность конструкции, обеспечить безопасность пациента. Многослойное стекло, преимущественно использовать триплекс (это два и более листа стекла, склеенные между собой), устойчиво к ударам, при ударе на поверхности образуется отверстие, но стекло не разбивается, при деформации защитит окружающих от разлета осколков.
Выполнение направляющих узлов подвижного модуля индуктора рельсовыми и размещение их непосредственно на раме каркаса обеспечивает максимальную жесткость конструкции, необходимую точность перемещения подвижного модуля без вибраций и без повышенного износа, а также позволяет обеспечить перемещение индуктора по всей длине рабочей поверхности.
Направляющие узла подвижного модуля индуктора выполнены рельсовыми и жестко закреплены непосредственно к каркасу с помощью винтов, такая система по своей прочности превосходит систему винтового крепежа сверху. Это делает узел более устойчивым и позволяет ему выдерживать более высокие боковые нагрузки. Также благодаря этому увеличивается площадь соприкосновения и снижается поверхностное давление, в результате повышается грузоподъёмность и долговечность данного узла, исключая вероятность смещения, наклона самого индуктора относительно рабочей поверхности.
Индуктор способен перемещается вдоль всего стола за счет рельсовых направляющих, расположенных вдоль всей длины рамы каркаса, и линейных шариковых кареток. Это позволяет проводить процедуры малоподвижным пациентам.
Применение в предлагаемом устройстве шагового двигателя, а не мотор-редуктора как в прототипе, повышает надёжность конструкции за счет минимизации трущихся компонентов, а также обеспечивает точный контроль смены положения индуктора с индикацией его реального положения.
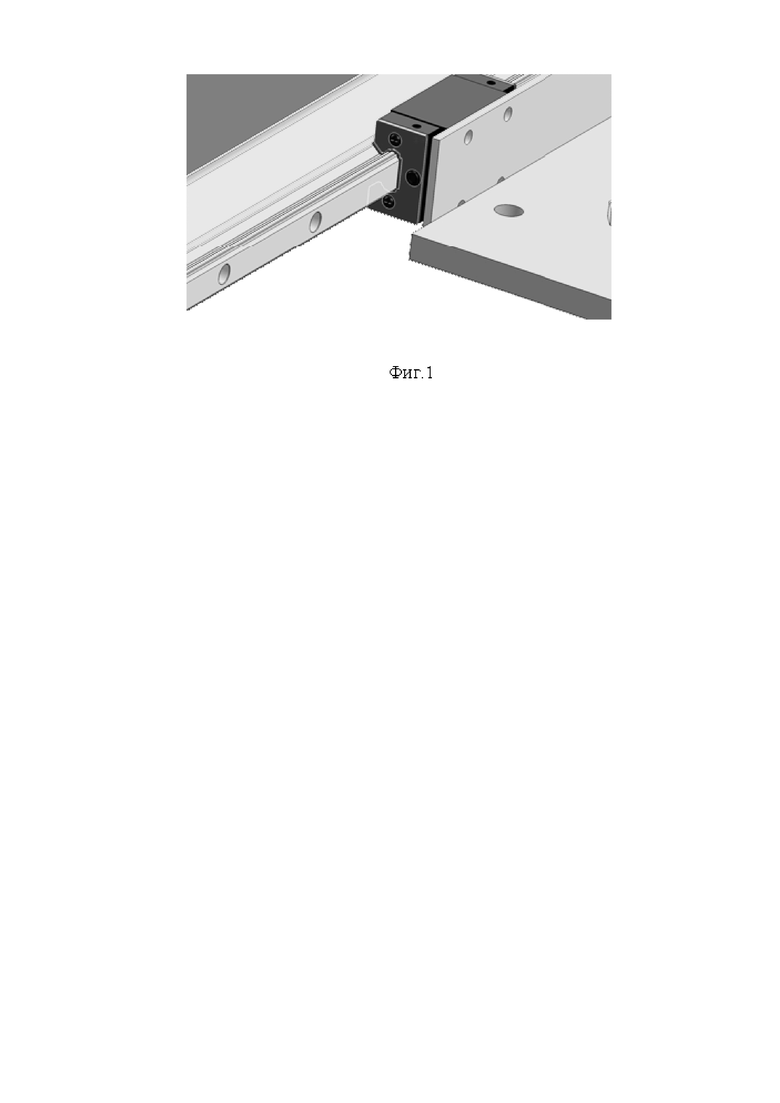
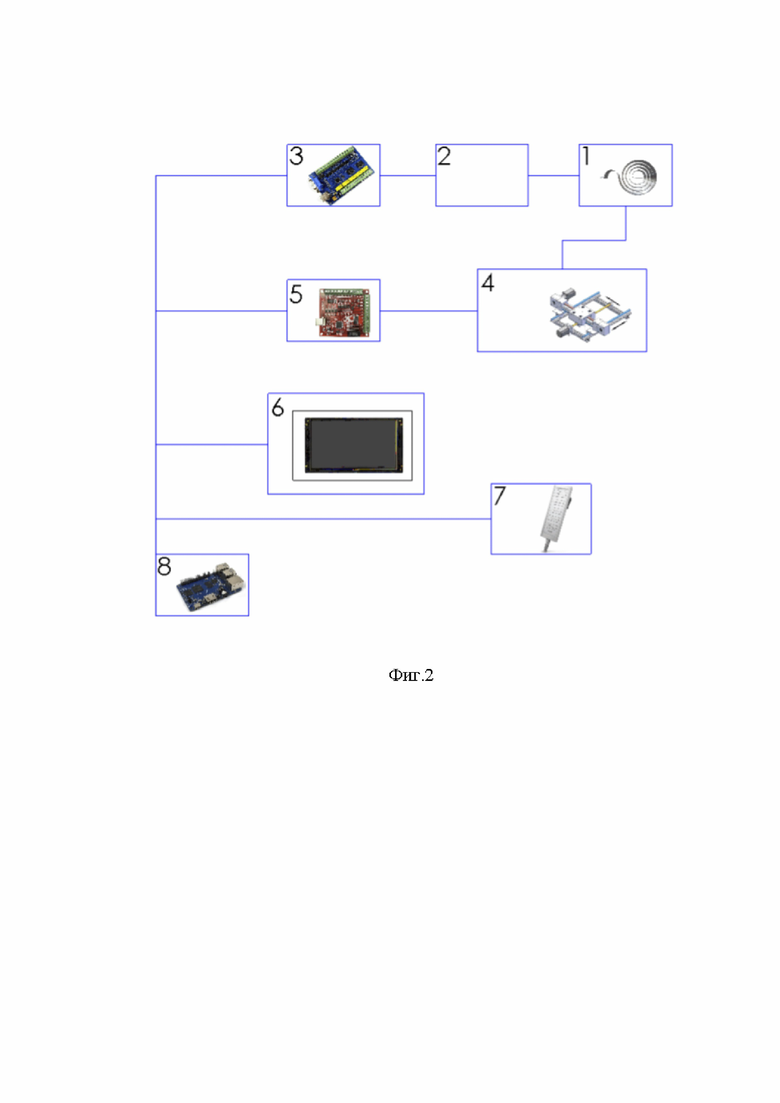
Предлагаемое техническое решение иллюстрируется примерами выполнения, где на фиг.1 показаны рельсовые направляющие узла подвижного модуля индуктора, на фиг.2 показан пример схемы устройства, где
1 – индуктор, генерирующий импульсные магнитные поля, преимущественно индуктор импульсного магнитного поля выполнен в виде Архимедовой спирали с прямоугольным сечением.
2 - блок формирования импульсного электрического тока, соединённый с индуктором-1, блок формирование импульсного электромагнитного тока обеспечивает широкий диапазон регулирования по величине магнитной индукции от 1 мкТл до 400 мТл, частоты импульсов от 1 до 200 Гц. Блок формирования, преимущественно, состоит из платы формирователя импульсов и мощных ключей (силового тринистора и высокомощного IGBT транзистора). Плата формирователя собрана с применением логических элементов КМОП структуры, оптоизолятора с логическим выходом, кремниевых эпитаксиально-планарных составных биполярных транзисторов Дарлингтона, высокочастотного трансформатора на ферритовом сердечнике, универсального интегрального таймера.
3 - система управления, соединённая с блоком формирования импульсного электрического тока 2, система управления позволяет блокам формирования импульсов создавать импульсы в соответствии с программой компьютера.
4 - система перемещения индуктора вдоль всей рабочей поверхности состоит из рельсовых направляющих, жестко закрепленных на каркасе аппарата, а также линейных шариковых кареток, соединенных непосредственно к основанию индуктора угловым профилем, приводящаяся в движение с помощью шагового двигателя и ШВП-передачи.
5 – беспроводной планшетный компьютер,
6 – радиочастотный пульт (беспроводной),
7 – одноплатный компьютер, соединённый с планшетным компьютером посредством WiFi – соединения 5, системой управления 3.
Компьютер 7 и системой управления 3 позволяют интегрировать в память компьютера заданные программы, оптимальные для проведения терапии различных заболеваний.
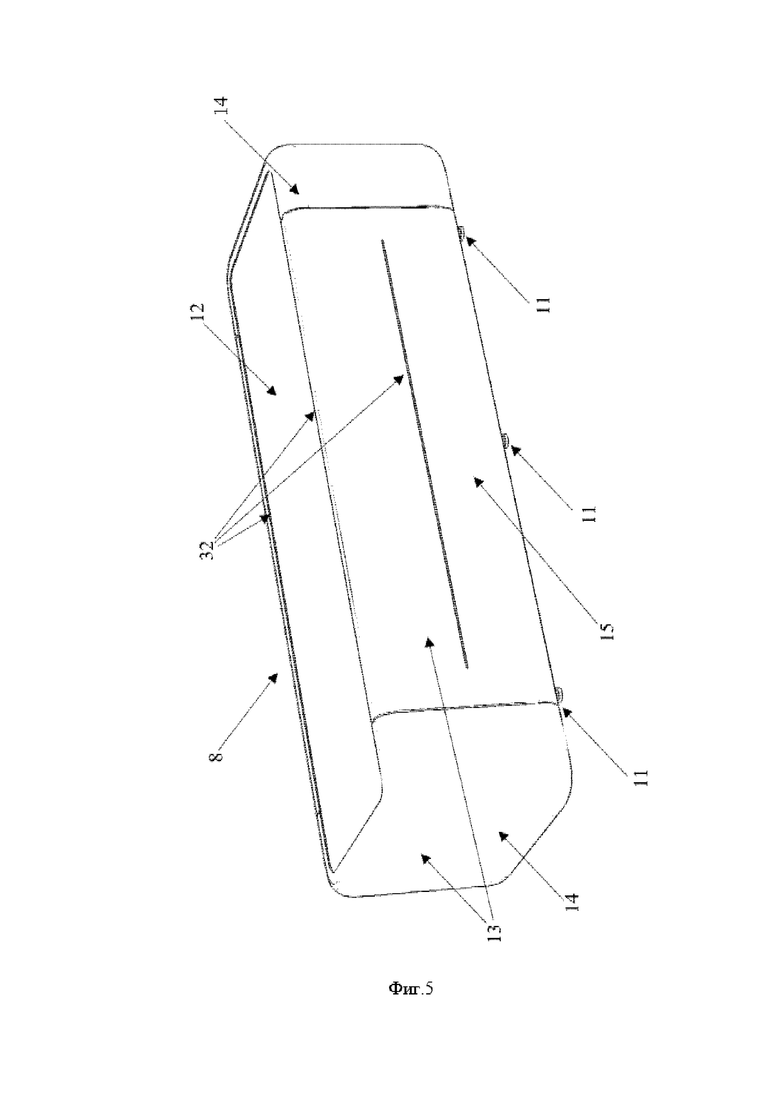
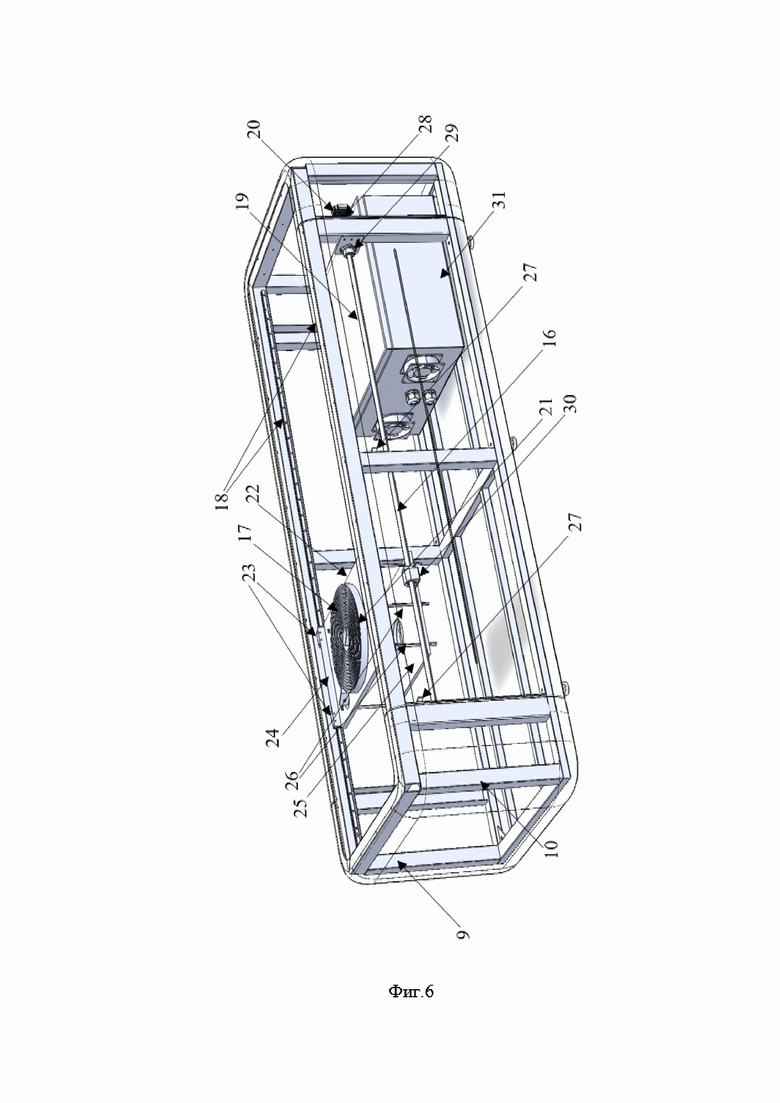
На фиг.3 – показан пример реализации устройства, вид сверху, на фиг.4 - пример реализации устройства, вид сбоку, на фиг. 5 – общий вид устройства, на фиг.6 – пример выполнения устройства.
Устройство работает следующим образом. Принцип действия заключается в преобразовании электрических сигналов заданных параметров в сигналы импульсного магнитного поля частотой 1-200 Гц с вариациями магнитной индукции от 1 до 400 мТл. Устройство имеет возможность индуцировать магнитное поле с возможностью изменения его частоты и амплитуды, а также наличия возможности генерации импульсов, промодулированных как по частоте, так и по мощности с заданным процентным соотношением амплитудной модуляции либо диапазона девиации частоты следования импульсов, по форме меандра, синусоиды, трапеции, треугольника, либо комбинированными формами.
Устройство реализовано в моноблочном массажном столе, который позволяет проводить процедуру глубокой электромагнитной стимуляции. Рабочая поверхность выполнена из многослойного закаленного стекла, триплекс, что способствует повышенной безопасности при проведении процедуры. Рабочая поверхность отделяет пациента от индуктора электромагнитного поля, при этом пропускает электромагнитное поле.
Для исключения нагрева рабочей поверхности, на которой расположен пациент, применяется система принудительной вентиляции, реализованная на основе направленных воздуховодов и специализированных высокоэффективных аксиальных вентиляторов, расположенных на подложке основания индуктора. Вентиляторы, не имеют корпуса, что позволяет использовать их вблизи источника электромагнитного поля (индуктора).
Потоки воздуха снимают излишнюю температуру с рабочей поверхности, не давая ей нагреваться выше 40 градусов Цельсия, обеспечивая процедуру с комфортом для пациента.
По бокам устройства расположены пластиковые панели с отверстиями для подсветки и с отверстием для блока подключения защиты и коммутации. Положение индуктора определяет световая индикация по периметру рабочей поверхности, что позволяет точно визуализировать его текущее позиционирование во время проведения процедуры.
Управление осуществляется с помощью беспроводного планшетного компьютера посредством связи с микрокомпьютером по сети WiFi или с помощью радиочастотного пульта.
Предлагаемый магнитотерапевтический аппарат 8 (см. фиг.5, 6) содержит каркас 9, состоящий из рамы 10, ножек или колес 11.
На раму 10 установлена рабочая поверхность 12, выполненная из двойного закалённого стекла повышенной прочности.
Аппарат 8 содержит декоративный корпус 13, который состоит из четырех элементов – двух торцевых панелей 14 и двух фронтальных панелей 15. Торцевые панели 14 закреплены на каркасе 9 посредством винтового соединения и клипс. Фронтальные панели 15 закреплены на каркасе 9 посредством клипс. Панели - 14, 15 выполнены цельно из ABS-пластика, имеют плавный переход в плоскость рабочей поверхности 12.
Внутри каркаса 9 расположен узел перемещения 16 индуктора. С помощью которого осуществляется точное перемещение индуктора 17 магнитного поля (далее - индуктор) вдоль рабочей поверхности 12. Узел перемещения индуктора 16 состоит из двух рельсовых направляющих 18, выполненных из металла, зафиксированных на каркасе с помощью винтового соединения, ШВП-передачи 19, превращающей вращательное движение шагового двигателя-20 в поступательное движение индуктора 17.
Модуль 21 индуктора состоит из основания 22, поверх которого установлен сам индуктор 17, и линейных кареток с гибким сепаратором 23, расположенных по обеим сторонам основания 22 индуктора, закрепленных угловым профилем 24 непосредственно к основанию 22 индуктора, а также из вентиляционной подложки 25, закрепленной на регулируемых подвесах на основании 26 индуктора для обеспечения максимальной точной регулировки высоты расположения вентиляторов.
Рама 10 представляет из себя сварную конструкцию, выполненную из профилей и листового металла. Основание 22 индуктора выполнено из текстолита, в котором методом фрезерного сверления сформирован паз спиралевидной формы, для расположения в ней индуктора 17.
Для обеспечения перемещения каретки в зоне установленных границ закреплены индукционные датчики 27, задающие значение калибровочных расстояний.
Соединённые последовательно шаговый двигатель 20, соединительная муфта с полиуретановой вставкой 28, радиальные опоры 29, шарико-винтовая передача (ШВП) 19, гайка ШВП 30 обеспечивают перемещение модуля 21 индуктора вдоль всей рабочей поверхности 12.
Шаговый двигатель 20 зафиксирован посредством кронштейна непосредственно на каркасе 9. Индуктор 17 в виде Архимедовой спирали с, например, прямоугольным сечением проводника, выполнен с возможность его подключения к электронному блоку 31.
Внутри каркаса 9 расположен электронный блок 31, внутри которого расположены высоковольтная и низковольтная части электронного оборудования, которые выполняют функцию формирования импульса с необходимыми параметрами для индуктора 17, а также контролируют систему перемещения модуля 21 индуктора, систему световой индикации 32 положения индуктора 17, систему обеспечивающую беспроводное управление аппаратом как посредством планшетного компьютера, так и с помощью радиопульта.
Основные технические характеристики предлагаемого устройства.
Значение магнитной индукции от 1 мкТл до 400 мТл.
Длительность импульса магнитной индукции 500 мкс ± 50 мкс.
Частота следования импульсов 1-200 Гц.
Электропитание осуществляется от сети переменного тока 230±10 В, 50 Гц.
Масса габаритные размеры;
Массажный стол со встроенной системой управления - 2200x700x600 мм, масса не более 200 кг.
Аппарат можно применять при следующих заболеваниях: лечение обострения остеохондроза (шейного, грудного и поясничного отделов позвоночника); декомпрессия корешков; подавление и устранение судорог конечностей; купирование и снятие хронических болей (шейного, грудного и поясничного отдела позвоночника); лечение нарушения осанки, восстановление физиологических изгибов (лечение сколиоза, лечение кифозов); коррекция состояния иммунной системы; коррекция психоэмоциональных состояний.
Преимущества технического решения.
Возможность регулировки мощности электромагнитной стимуляции и частоты следования импульсов, аналогичные аппараты не имеют такой функции. Возможность плавной регулировки мощности электромагнитной стимуляции осуществляется за счет изменения напряжения заряда накопительной ёмкости колебательного контура индуктора посредством подачи управляющих сигналов с микроконтроллера на блок регулировки напряжения. Регулировка частоты следования импульсов реализована посредством деления частоты базового кварционного генератора. Регулировки мощности электромагнитной стимуляции и частоты следования импульсов имеют высокую дискретизацию деления, что позволяет считать изменения данных параметров "плавными".
Работа от сети 220 В, обеспечивает возможность установки в помещениях, не имеющих подключения к трёхфазному питанию.
Индуктор магнитного поля установлен на подвижной платформе способной беспрепятственно перемещаться вдоль всего тела пациента (вдоль всей рабочей поверхности).
Повышенная прочность рабочей поверхности аппарата, а также усиленный сварной стальной каркас позволяет проводить процедуры пациентам весом до 150 кг.
Наличие диагностического режима (реализовано посредством автоматического движения индуктора вдоль всей рабочей поверхности, всего тела пациента) позволяет оперативно проанализировать очаги воспаления, спазмированные зоны в теле пациента для определения дальнейшего плана лечения.
Система управления посредством беспроводного соединения позволяет выводить управление процедурой, т.е. изменять протокол лечения (величину магнитного поля, частоту следования импульсов, их величину), а также останавливать и запускать процедуру при возникшей необходимости на следующих устройствах: ПК с операционными системами Microsoft Windows, macOS (ранее Mac OS X), Linux и др., а также на мобильных устройства на базе операционных систем Android, iOS (Apple), HarmonyOS (Huawei), KaiOS и др. Система управления позволяет создавать библиотеку пациентов, содержащую полную информацию о пациенте (ФИО, возраст, вес, дата рождения, рост) и включающую в себя протоколы его лечения (уже проведенные, а также запланированные) с полной автоматизацией процедуры, включающую в себя изменение величины магнитного поля, частоту следования импульсов, их величину и изменение позиционирование индуктора без участия оператора.
Оборудование состоит исключительно из негигроскопичных материалов, что повышает безопасность использования оборудования при повышении влажности в помещении.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТОТЕРАПЕВТИЧЕСКИЙ АППАРАТ | 1997 |
|
RU2129447C1 |
| СПОСОБ ФИЗИОТЕРАПЕВТИЧЕСКОГО ВОЗДЕЙСТВИЯ НА ОРГАНЫ ЗРЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2260404C2 |
| МАГНИТОТЕРАПЕВТИЧЕСКИЙ АППАРАТ | 1998 |
|
RU2139112C1 |
| АППАРАТ И СПОСОБ ФИЗИОТЕРАПЕВТИЧЕСКОГО ВОЗДЕЙСТВИЯ ДЛЯ ЛЕЧЕНИЯ НАРУШЕНИЙ ПОЛОВЫХ ФУНКЦИЙ У МУЖЧИН, ИНДУКТОР, ВАКУУМНАЯ КОЛБА И ЕЕ УПЛОТНИТЕЛЬ ДЛЯ ИХ ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2487696C1 |
| МАГНИТОТЕРАПЕВТИЧЕСКАЯ УСТАНОВКА | 2001 |
|
RU2191043C1 |
| МАГНИТОТЕРАПЕВТИЧЕСКАЯ УСТАНОВКА | 1992 |
|
RU2034579C1 |
| Стационарное устройство для воздействия низкочастотным магнитным полем на медико-биологические объекты, система управления и формирования импульсов, индуктор магнитного поля и система механического привода стационарного устройства | 2017 |
|
RU2653628C1 |
| МАГНИТОТЕРАПЕВТИЧЕСКАЯ УСТАНОВКА | 2003 |
|
RU2247583C2 |
| МАГНИТОТЕРАПЕВТИЧЕСКАЯ УСТАНОВКА | 1992 |
|
RU2033205C1 |
| СПОСОБ МАГНИТОТЕРАПИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2302269C2 |
Изобретение относится к медицинской технике. Магнитотерапевтический аппарат состоит из каркаса с рабочей поверхностью, выполненной с возможностью пропускания электромагнитного поля. Внутри каркаса расположен индуктор магнитного поля, выполненный с возможностью соединения с генератором и установленный на подвижном модуле. Рабочая поверхность выполнена из, как минимум, двойного закаленного стекла. Направляющие узла подвижного модуля индуктора выполнены рельсовыми и установлены непосредственно по всей длине рамы каркаса. Индуктор выполнен с возможностью приведения в движение с помощью шагового двигателя и соединенной с ним шарико-винтовой передачи. Плавная регулировка мощности электромагнитной стимуляции обеспечивается изменением напряжения заряда накопительной емкости колебательного контура индуктора посредством подачи управляющих сигналов с микроконтроллера на блок регулировки напряжения. Достигается повышение надежности конструкции, предназначенной, в том числе, для оказания услуг малоподвижным пациентам с избыточным весом. 9 з.п. ф-лы, 6 ил.
1. Магнитотерапевтический аппарат, состоящий из каркаса с рабочей поверхностью, выполненной с возможностью пропускания электромагнитного поля, внутри каркаса расположен индуктор магнитного поля, выполненный с возможностью соединения с генератором и установленный на подвижном модуле, отличающийся тем, что рабочая поверхность выполнена из, как минимум, двойного закаленного стекла, направляющие узла подвижного модуля индуктора выполнены рельсовыми и установлены непосредственно по всей длине рамы каркаса, индуктор выполнен с возможностью приведения в движение с помощью шагового двигателя и соединенной с ним шарико-винтовой передачи, причем аппарат выполнен с возможностью плавной регулировки мощности электромагнитной стимуляции за счет изменения напряжения заряда накопительной емкости колебательного контура индуктора посредством подачи управляющих сигналов с микроконтроллера на блок регулировки напряжения.
2. Магнитотерапевтический аппарат по п.1, отличающийся тем, что содержит встроенную систему управления, состоящую из микрокомпьютера, соединенного с контроллером, для получения импульсного магнитного поля с плавной регулировкой параметров лечебной процедуры.
3. Магнитотерапевтический аппарат по п.1, отличающийся тем, что рабочая поверхность выполнена из стекла триплекс.
4. Магнитотерапевтический аппарат по п.1, отличающийся тем, что каркас выполнен из стали.
5. Магнитотерапевтический аппарат по п.1, отличающийся тем, что линейные шариковые каретки закреплены угловым профилем непосредственно к основанию индуктора.
6. Магнитотерапевтический аппарат по п.1, отличающийся тем, что содержит корпус, состоящий из торцевых панелей и фронтальных панелей.
7. Магнитотерапевтический аппарат по п.1, отличающийся тем, что рельсовые направляющие выполнены из металла и зафиксированы на каркасе с помощью винтового соединения.
8. Магнитотерапевтический аппарат по п.1, отличающийся тем, что рама представляет из себя сварную конструкцию, выполненную из профилей и листового металла.
9. Магнитотерапевтический аппарат по п.1, отличающийся тем, что шаговый двигатель зафиксирован посредством кронштейна на каркасе.
10. Магнитотерапевтический аппарат по п.1, отличающийся тем, что внутри каркаса расположен электронный блок, внутри которого расположены высоковольтная и низковольтная части электронного оборудования, которые выполняют функцию формирования импульса с необходимыми параметрами для индуктора, а также контролируют систему перемещения модуля индуктора, систему световой индикации положения индуктора, систему, обеспечивающую беспроводное управление аппаратом как посредством планшетного компьютера, так и с помощью радиопульта.
| УСТРОЙСТВО для АБРАЗИВНО-АЛМАЗНОЙ ОБРАБОТКИ ЦИЛИНДРИЧЕСКИХ ШЕЕК ДЕТАЛЕЙ | 0 |
|
SU221528A1 |
| CN 117679652 A, 12.03.2024 | |||
| US 2014121532 A1, 01.05.2014 | |||
| CN 202961201 U, 05.06.2013 | |||
| CN 105486393 A, 13.04.2016 | |||
| WO 2024035278 A1, 15.02.2024 | |||
| US 2023158322 A1, 25.05.2023 | |||
| МАГНИТОТЕРАПЕВТИЧЕСКАЯ УСТАНОВКА | 2001 |
|
RU2205044C2 |

