Изобретение относится к военной технике и может быть использовано в качестве устройства автоматизации движения беспилотных машин в колонне.
Одним из ключевых направлений развития конструкций образцов военной техники является разработка модификаций с повышенным уровнем автоматизации, которая должна быть достигнута за счет совершенствования бортовых информационно-управляющих систем и систем автоматического управления транспортным средством, а также за счет внедрения в конструкцию систем предупреждения столкновений при движении в колонне.
Для реализации автоматизированного движения транспортных средств известен ряд технических решений.
Так, известно автоматическое устройство предотвращения столкновений транспортных средств в колонне (Патент RU № 158143, МПК G01S 13/93, опубл. 20.12.2015 г), состоящее из генератора непрерывных колебаний, модулятора, первого усилителя мощности, сумматора, циркулятора, антенны, смесителя, преобразователя частоты, детектора, регистратора дальности, первого регистратора скорости, второго усилителя мощности, фильтра доплеровских частот, второго регистратора скорости, вычислителя опасного расстояния по дальности, путевой скорости и скорости сближения, первой, второй и третьей исполнительных схем, схемы управления положением антенны, датчика угла поворота рулевого колеса.
Известно устройство управления движением и способ управления движением (Патент RU № 2624392, МПК B60W 30/16, опубл. 30.07.2017), состоящий из рабочего переключателя управления, датчика скорости колеса, наружного распознающего устройства, устройства связи, устройства управления движением, контроллера тормоза, контроллера приведения в движение/рулевого управления, контура давления текучей среды, тормозного устройства, устройства приведения в движение/рулевого управления и колеса.
Известна бортовая информационная система беспилотного транспортного средства (Патент RU № 2536337 С1, МПК G05D 1/00 (2006.01) G06F 19/00 (2011.01), опубл. 20.12.2014), состоящая из совокупности электронного блока, миниатюрных видеокамер, коммутатора, блока хранения цифровой информации, блока распознавания знаков, радара, первого и второго ключей, устройства управления скоростью движения, устройства управления направлением движения, устройства управления тормозной системой, блока определения опасных ситуаций и связей между ними.
В качестве общего недостатка перечисленных устройств является отсутствие возможности осуществления автоматизированного беспилотного движения ведомых машин в колонне по принципу следования по курсу, заданному транспортным средством, движущимся впереди.
Наиболее близким техническим решением, принятым за прототип, является автоматическое устройство предотвращения столкновений транспортных средств в колонне (Патент RU № 158143, МПК G01S 13/93, опубл. 20.12.2015 г). Существенным недостатком прототипа (помимо общего недостатка) является низкая эффективность, обусловленная невозможность стабильной работы компонентов устройства в условиях воздействия радиопомех.
Техническим результатом заявленного устройства является повышение эффективности работы за счет обеспечения автоматизированного движения беспилотных машин в колонне по курсу, заданному транспортным средством, движущимся впереди, в том числе и в условиях воздействия радиопомех.
Технический результат достигается тем, что в устройство дополнительно установлены блок захвата и автосопровождения, тепловизионная камера, видеосмотровое устройство, пульт управления блоком вычислителя, блок вычислителя, электронный блок управления, четвертая исполнительная схема, схема управления положением тепловизионной камеры, излучатель тепла.
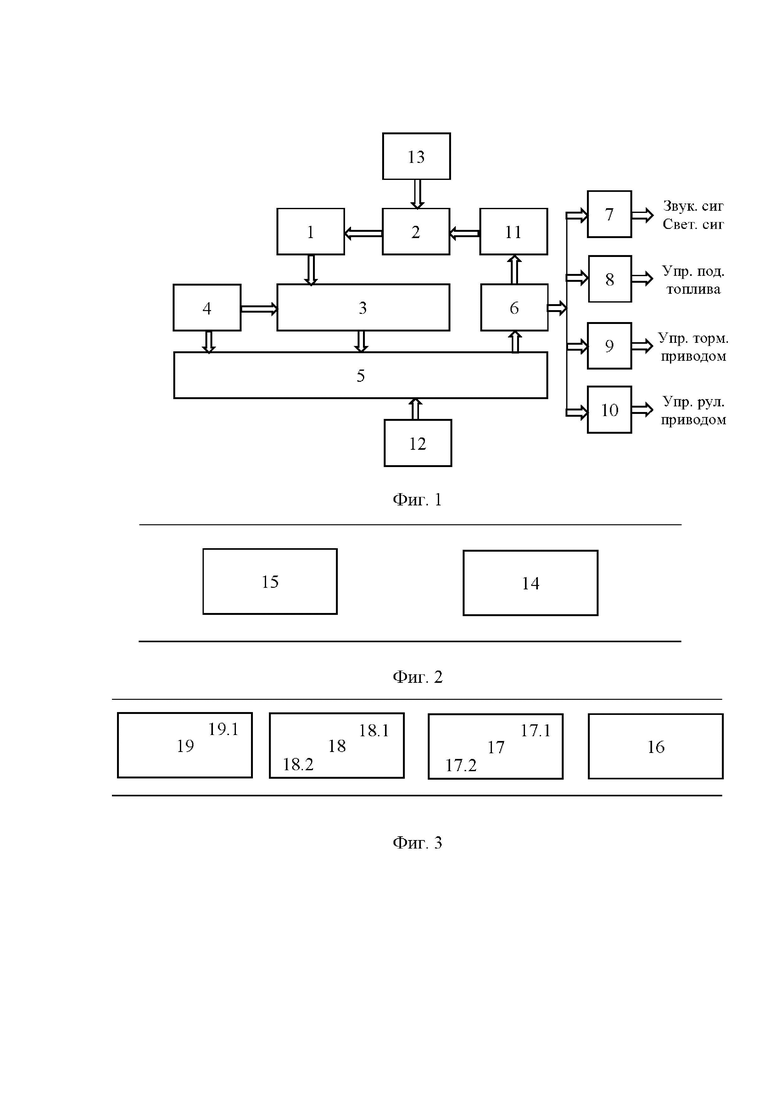
Функциональная схема устройства обеспечения автоматизированного движения беспилотных машин в колонне представлена на фиг. 1
Заявленное устройство состоит из блока захвата и автосопровождения (БЗА) 1, тепловизионной камеры (ТК) 2, видеосмотрового устройства (ВСУ) 3, пульта управления блоком вычислителя (ПУ БВ) 4, блока вычислителя (БВ) 5, электронного блока управления (ЭБУ) 6, первого 7, второго 8, третьего 9 и четвертого 10 исполнительных схем, схемы управления положением тепловизионной камеры 11, датчика угла поворота рулевого колеса 12, излучателя тепла (ИТ) 13.
Заявленное устройство обеспечения автоматизированного движения беспилотных машин в колонне работает следующим образом.
Формируется колонна транспортных средств (фиг. 2), состоящая из одного пилотируемого, назначенного головным ведущим 14, и по меньшей мере одного ведомого 15 беспилотного транспортных средств (БТС). Беспилотные технологии, применяемые в конструкции транспортных средств участников движения в формируемых колоннах, не исключают возможности их пилотирования как дублирующий способ управления, при этом пилотируемое транспортное средство может быть оборудовано только излучателем тепла, а БТС оборудовано данным устройством. При формировании колонны (фиг. 3) из более чем одного БТС 17, 18, 19 каждое транспортное средство, движущееся в колонне за транспортным средством, движущимся впереди, будет считаться ведомым 17.1, 18.1, 19.1, каждое транспортное средство, за которым осуществляет движение ведомое транспортное средство, будет считаться ведущим 16, 17.2, 18.2 по отношению к следующему за ним ведомому транспортному средству.
Каждое ведомое беспилотное транспортное средство после включения заявленного устройства в работу осуществляет захват излучателя тепла ведущего транспортного средства.
Для удержания захваченного излучателя тепла ведущего транспортного средства во время движения, обеспечения движения БТС по курсу, заданному ведущим транспортным средством, и недопущения перезахвата другого излучателя тепла, установленного на множестве других транспортных средств, движущихся в поле зрения ТК, на каждом ведущем транспортном средстве устанавливается излучатель, вырабатывающий тепловое излучение определенной температуры, превышающей естественный максимальный тепловой фон и тепловой фон, излучаемый самим транспортным средством, причем температура и форма излучения могут задаваться программно или вручную с помощью пульта управления вычислителем.
БЗА обеспечивает:
- формирование признака готовности к захвату излучателя тепла транспортного средства, движущегося впереди, находящегося в поле зрения тепловизионной камеры при условии достаточного теплового контраста;
- возможность захвата выбранного транспортного средства, движущегося впереди, при формировании в поле зрения тепловизионной камеры признака готовности к захвату;
- автоматическое следование за захваченным излучателем тепла транспортного средства, движущегося впереди, посредством непрерывного удержания в поле зрения тепловизионной камеры;
- автосопровождение прогнозируемого положения захваченного излучателя тепла транспортного средства, движущегося впереди, при кратковременных перекрытиях его внешними препятствиями (инерционное сопровождение) и автоматический перезахват после выхода из-за перекрытия.
Принцип действия БЗА заключается в цифровой обработке видеоданных, формируемых тепловизионной камерой, определении координат изображения излучателя тепла транспортного средства, движущегося впереди, относительно центральной марки видеосмотрового устройства с выработкой сигналов управления поворотом тепловизионной камеры по закону, обеспечивающему автоматическое удержание и следование захваченному излучателю тепла транспортного средства, движущегося впереди.
Тепловизионная камера (ТК) обладает гироскопическим свойством, что позволяет ей осуществлять следящее действие при помощи поворота в направлении перемещения захваченного излучателя тепла ведущего транспортного средства. Внутри ТК установлены: би-афокальный объектив; сканирующее устройство; приемник инфракрасного излучения; источник питания; электронные платы; электрические соединения.
Объектив ТК формирует тепловизионное изображение транспортного средства, движущегося впереди, и его излучателя тепла в плоскости зеркала сканирующего устройства. Сканирующее устройство последовательно проецирует на приемник инфракрасного излучения части сформированного объективом изображения. Электрические сигналы с приемника поступают в электронные схемы обработки изображения, которые формируют тепловизионный сигнал.
БВ обеспечивает автоматическое вычисление: углов и величин отклонения текущего положения ведомого транспортного средства от траектории, заданной ведущим транспортным средством; дистанции до ведущего транспортного средства; разности скоростей собственной и ведущего транспортного средства; сигналов датчиков, определяющих условия движения (крен, тангаж, угол поворота рулевого колеса, массу машины, плотность опорного основания и т.д).
Для решения задач автоматического движения по курсу, заданному ведущим транспортным средством, блок вычислителя обрабатывает сигналы, поступающие с датчиков и вводимые вручную. БВ вырабатывает суммарные сигналы в области автоматизации скорости и направления движения ведомого транспортного средства с автоматическим их вводом в электронный блок управления, откуда они поступают на исполнительные механизмы органов управления БТС, осуществляя движение по заданному курсу.
Пульт управления блоком вычислителя предназначен для настройки БВ, контроля основных параметров БВ, ввода данных, а также для выбора автоматического или ручного режимов учета факторов, влияющих на точность следования заданному курсу (включения или отключения соответствующих датчиков).
ЭБУ обеспечивает управление системой захвата и автосопровождения, а также электрическую стыковку с другими элементами устройства, управляет работой первой, второй, третьей и четвертой исполнительной схем, схемой управления положением тепловизионной камеры.
В результате работы данного устройства обеспечивается автоматизированное движение беспилотных машин в колонне по курсу, заданному транспортным средством, движущимся впереди, в условиях воздействия радиопомех.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления движением автомобильной техники в составе колонны с учетом состояния опорной поверхности, рельефа и кривизны маршрута | 2022 |
|
RU2790889C1 |
| Способ прогностического иерархического управления интеллектуальной транспортной системой при управлении движением колонны на территориях с холодным климатом | 2018 |
|
RU2690143C1 |
| ВЕРТОЛЕТНЫЙ КОМПЛЕКС СОВРЕМЕННОГО БОРТОВОГО ВООРУЖЕНИЯ | 2019 |
|
RU2726301C1 |
| БЕСПИЛОТНОЕ ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ ЕГО ДВИЖЕНИЕМ | 2022 |
|
RU2809334C1 |
| Способ управления движением беспилотных транспортных средств (БТС) в колонне и/или отдельных БТС и мониторинга интеллектуальной транспортной инфраструктурой (ИТИ) сети автомобильных дорог | 2019 |
|
RU2725569C1 |
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ | 2007 |
|
RU2351876C1 |
| БОЕВОЙ МОДУЛЬ С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ | 2023 |
|
RU2828680C1 |
| Способ дистанционного управления автономным движением колонн и/или беспилотных транспортных средств (БТС) интеллектуальной транспортной инфраструктурой (ИТИ) сети автомобильных дорог | 2018 |
|
RU2712715C1 |
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ И СТАБИЛИЗАТОР ВООРУЖЕНИЯ | 2007 |
|
RU2360208C2 |
| Способ прогностического иерархического управления интеллектуальной транспортной системой при управлении движением колонны | 2020 |
|
RU2750942C1 |
Изобретение относится к области военной техники и может быть использовано в качестве устройства автоматизации движения беспилотных машин в колонне. Техническим результатом заявленного устройства является повышение эффективности работы за счет обеспечения автоматизированного движения беспилотных машин в колонне по курсу, заданному транспортным средством, движущимся впереди, в том числе и в условиях воздействия радиопомех. Технический результат достигается тем, что в устройство обеспечения автоматизированного движения беспилотных машин в колонне дополнительно установлены блок захвата и автосопровождения, тепловизионная камера, видеосмотровое устройство, пульт управления блоком вычислителя, блок вычислителя, электронный блок управления, четвертая исполнительная схема, схема управления положением тепловизионной камеры, излучатель тепла. 3 ил.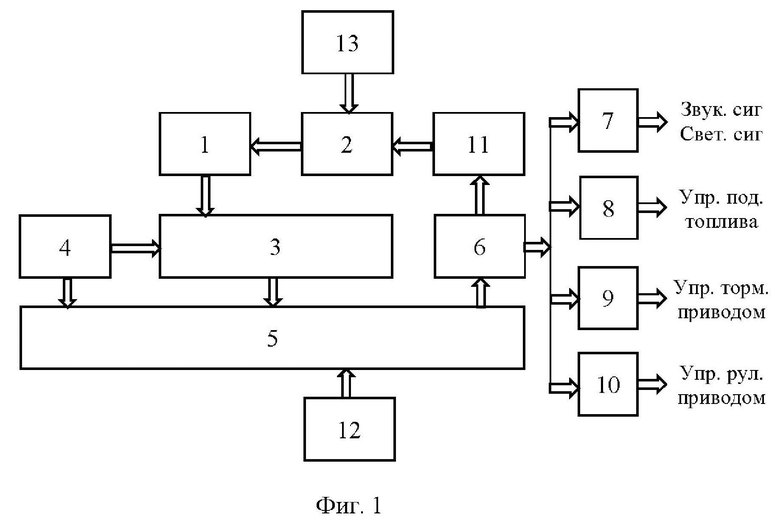
Устройство обеспечения автоматизированного движения беспилотных машин в колонне, содержащее первую исполнительную схему управления звуковым и световым сигналами, вторую исполнительную схему управления подачей топлива и третью исполнительную схему управления тормозным приводом, датчик угла поворота рулевого колеса, отличающееся тем, что дополнительно введены блок захвата и автосопровождения для захвата и автоматического следования за излучателем тепла ведущего транспортного средства, движущегося впереди, находящегося в поле зрения установленной тепловизионной камеры, пульт управления блока вычислителя, соединённый с блоком вычислителя электронного блока управления и видеосмотровым устройством, который соединен с блоком захвата и автосопровождения, где электронный блок управления соединен со схемой управления положением тепловизионной камеры, а также с первой, третьей и четвертой исполнительной схемой управления рулевым приводом, а также излучатель тепла на ведущем транспортном средстве, вырабатывающий тепловое излучение определенной температуры, превышающей естественный максимальный тепловой фон и тепловой фон, излучаемый ведущим транспортным средством, причем температура и форма излучения задаются пультом управления блока вычислителя.
| DE 102020003825 A1, 25.02.2021 | |||
| CN 106740848 A, 31.05.2017 | |||
| WO 2017105319 A1, 22.06.2017 | |||
| СПОСОБ ГРУППОВОГО ВОЖДЕНИЯ ДОРОЖНЫХ ДРОНОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2662297C1 |
| 0 |
|
SU158143A1 | |
| Способ прогностического иерархического управления интеллектуальной транспортной системой при управлении движением колонны на территориях с холодным климатом | 2018 |
|
RU2690143C1 |
| US 2019339716 A1, 07.11.2019. | |||

