Изобретение относится к области навигации и дистанционного управления, преимущественно, дорожными дронами (автономными или дистанционно управляемыми беспилотными дорожно-уборочными машинами), но может быть использовано и в других областях хозяйственной деятельности, например, при обработке сельхозугодий, в том числе при их разминировании.
Известен «Способ формирования колонны из индивидуально движущихся объектов» (патент SU 1712219 А1, МПК: B61B 1/00, G08G 01/09, B60K 31/00, опубл. 15.02.92. Бюл. №6). Способ состоит в определении, сравнении и изменении скоростей объектов. Сначала определяют нагрузку ведущего объекта, сравнивает ее с допустимой, определяют резервную нагрузку и нагрузку, необходимую для транспортировки индивидуального объекта, сравнивают ее с резервной и при превышении второй над первой определяют маршруты движения объектов в колонне, сравнивают последовательно эти маршруты с маршрутом индивидуального объекта. Далее выбирают в колонне объект, маршрут которого наиболее близок к маршруту индивидуально движущего объекта, расстыковывают объекты, следующие за выбранным, определяют расстояние, достаточное для входа в колонну индивидуально движущегося объекта (которое равно утроенной длине этого объекта), уменьшают скорость отстыкованной части колонны, сравнивая расстояние между расстыкованными частями с указанным выше расстоянием и при их совпадении увеличивают скорость отстыкованной части до ее первоначального значения. Стыкуют индивидуально движущийся объект с выбранным объектом колонны, затем, сначала увеличивают, а потом уменьшают скорость отстыкованной части до первоначального значения, непрерывно определяя расстояние между расстыкованными частями до полного сближения, и стыкуют расстыкованные части колонны.
Рассматриваемый способ не обеспечивает группового движения объектов развернутой цепью и предусматривает движение колонной лишь в состоянии стыковки ее объектов. К тому же в этом способе определено, что при расстыковке колонны для принятия в нее нового объекта переднюю часть тянет ведущий тягач и не определено какой объект и с какими ресурсами тянет вперед заднюю часть колонны. Также не конкретизирована операция вхождения и выхода индивидуального объекта из колонны. Таким образом, данный способ работоспособен лишь при ручном управлении индивидуальными объектами.
Известен «Способ группового вождения сельскохозяйственных агрегатов» (патент SU 1103814 А, МПК: A01B 69/04, опубл. 23.07.84. Бюл. №27). Способ включает перемещение по гону группы сельскохозяйственных агрегатов с поддержанием заданного угла равнения и дистанции между агрегатами на гоне и поворот с последующим их выходом на другой гон, при повороте агрегатов также осуществляют поддержание заданного угла равнения и дистанции между агрегатами. Система для группового вождения с поддержанием дистанции и угла равнения в гоне и при повороте содержит ведущий агрегат с размещенными на нем радиопередатчиком и уголковым отражателем, ведомый агрегат (агрегаты) с размещенными на нем радиоприемником и микро-ЭВМ, вырабатывающей команды на исполнительное устройство по данным радиолокационного дальномера. При выводе ведомых агрегатов на заданное место в группе механизатор, находящийся на ведущей машине, через радиоканал передатчик-приемник передает на ведомые агрегаты команды начала и конца движения, изменения скорости и направления движения. Далее агрегаты удерживаются в группе по командам микро-ЭВМ, получающей сигналы отклонения дистанции и угла равнения, от заданных величин, вырабатываемым радиолокационным дальномером, луч которого отражается уголковым отражателем, размещенным на ведущем агрегате. При этом исполнительное устройство по командам микро-ЭВМ изменяет скорость и положение направляющих колес агрегата в сторону, противоположную отклонениям параметров движения от заданных величин.
Вследствие движения ведущего и ведомых агрегатов не по ровной дороге, а по неровной поверхности поля, радиопередатчик и радиоприемники вместе с корпусами соответствующих агрегатов будут подвергаться хаотическим линейным и угловым возмущениям. В таких условиях выдерживать постоянный заданный угол равнения с помощью равно сигнального направления электромагнитного излучения без использования специальных систем стабилизации практически невозможно. Это приводит к проблемам в отслеживания ведомыми агрегатами заданного угла равнения и расстояний между собой. Работа радиопередатчика в микроволновых и оптических диапозонах радиоволн не обеспечивает надежного достижения его сигналов до ведомых агрегатов из-за экранирования ближайшими к ведущему агрегату ведомыми агрегатами удаленных ведомых агрегатов, а использование радиопередатчиком более длинных радиоволн не обеспечивает необходимой точности навигации ведомых агрегатов. Кроме того, в процессе движения ведомых агрегатов, в силу управления ими по отклонениям, они принципиально не могут выдерживать одинаковый угол равнения и тогда возникает проблема многозначности замеров дальномеров, размещенных на ведомых агрегатах. К тому же, использование микро-ЭВМ в контуре управления каждого дрона без предъявления алгоритма ее работы делает рассматриваемый способ неопределенным.
Известен «Способ управления курсом движения машины» (патент SU 1131487, МПК: A01B 69/04, G05D 1/02, опубл. 30.12.84. Бюл. №48), который принят в качестве прототипа. Данный способ включает в себя определение расстояния от машины до двух заданных точек с использованием электромагнитных сигналов, основным источником электромагнитных колебаний периодически возбуждают два источника звуковых, преимущественно ультразвуковых колебаний, установленные в заданных точках, на машине принимают сигналы основного источника электромагнитных колебаний и обоих источников звуковых колебаний, сигнал одного из которых принимают также дополнительным приемником звуковых сигналов, удаленным на известное расстояние от одного из источников звуковых колебаний и совмещенным с дополнительным источником электромагнитных колебаний, сигналы которого принимают на машине, определяют интервалы времени от момента поступления на машину сигнала основного источника электромагнитных колебаний до моментов поступления на нее сигналов первого и второго источников звуковых колебаний и сигнала дополнительного источника электромагнитных колебаний, вычисляют скорость звука V по формуле V=l1/Δt1, где l1 - известное расстояние от соответствующего источника до дополнительного приемника звуковых колебаний, a Δt1 - интервал времени от момента поступления на машину сигнала основного источника электромагнитных колебаний до момента поступления на нее сигнала дополнительного источника электромагнитных колебаний. Источники звуковых сигналов устанавливают вдоль прямой, перпендикулярной плоскостям, в которых находятся заданные траектории движения машин. В систему автоматического управления курсом движения машины в зависимости от расположения траектории относительно заданных точек подают сигналы рассогласования J, равные J=(VΔt2)2-(VΔt3)2-2lx или J=(VΔt3)2-(VΔt2)2-2lx, где l - расстояние между двумя заданными точками, в которых расположены источники звуковых колебаний; Δt2 и Δt3 - интервалы времени от момента поступления на машину сигнала основного источника электромагнитных колебаний до момента поступления на нее сигналов соответственно первого и второго источников звуковых колебаний; x - расстояние от центра отрезка, соединяющего заданные точки, до плоскости, в которой находится заданная траектория движения. Все источники колебаний используют сигналы различной частоты. Способ обеспечивает возможность группового вождения машин по траекториям, лежащим в параллельных плоскостях.
Для группового вождения дорожно-уборочных машин в мегаполисах способ-прототип неприменим, поскольку требует для своего использования больших затрат по оборудованию тысяч улиц источниками электромагнитных и звуковых сигналов. Кроме того способ обеспечивает групповое вождение дорожных машин цепью лишь по траекториям в параллельных плоскостях, а улицы городов часто бывают криволинейными. Способ не позволяет оперативно изменять количество дорожных дронов в развернутой цепи под стать ширине обрабатываемых дорог и не обеспечивает регулирования продольной безопасной дистанции между машинами в группе в зависимости от скорости ее движения.
Известна конструкция системы, описанная в патенте «Способ управления групповым вождением машин» (RU 2172085, МПК: A01B 69/04, G05D 1/02, опубл. 20.08.2001). Способ и реализующая его система ориентированы, преимущественно, на групповое вождение пары машин: скрепер и трактор-толкач. Система включает в себя на борту скрепера: левую и правую группы датчиков соприкосновения, которые своими выходами связаны с первыми входами, соответственно, левого и правого блоков формирования переменного визуального сигнала о положении трактора-толкача относительно линии симметрии скрепера, первые выходы которых связаны со входами, соответственно, левой и правой групп индикаторов положения трактора-толкача, а вторые выходы соединены, соответственно, с первым и вторым входами блока формирования переменного звукового сигнала, первый выход которого связан со вторыми входами левого и правого блока формирования переменного визуального сигнала о положении трактора-толкача относительно линии симметрии скреппера, а второй и третий выходы соединены, соответственно, с первым входом блока определения скорости скрепера и входом звукового излучателя, второй вход блока определения скорости скрепера связан с выходом датчика оборотов тросика спидометра скрепера, а выход соединен с входом цифрового индикатора скорости скрепера, а на борту трактора-толкача система включает датчик движения трактора-толкача, своим выходом соединенный с входом указателя скорости трактора-толкача.
Система предназначена для помощи водителю трактора-толкача при ручной стыковке со скрепером, она не обеспечивают группового движения дорожных машин развернутой цепью и колонной без их стыковки между собой и ведущей машиной.
Известна конструкция системы, описанная в патенте «Способ обеспечения активной безопасности транспортных средств при движении в колонне» (RU 2388057, МПК: G08G 1/16, опубл. 27.04.2010 г.). Система обеспечивает повышение эффективности регулирования скоростного режима объектов транспортного потока посредством интегрирования в общую систему антиблокировочных систем рабочих тормозов всех объектов колонны и введения канала обмена параметрами между объектами колонны. Система предотвращения столкновений транспортных средств содержит: генератор непрерывных колебаний, модулятор, первый усилитель мощности, сумматор, циркулятор, антенну, смеситель, преобразователь частоты, детектор, регистратор дальности, первый регистратор скорости, второй усилитель мощности, фильтр доплеровских частот, второй регистратор скорости, вычислителя опасного расстояния по дальности, путевой скорости и скорости сближения, схема управления положением антенны, первая и вторая, третья и четвертая исполнительная схемы, модулятор и циркулятор антенны обмена данными между объектами колонны, сравнитель. Выход генератора непрерывных колебаний соединен с входом модулятора, первым входом смесителя и входом второго усилителя мощности, выход которого соединен с первым входом сумматора, второй вход которого соединен с выходом первого усилителя мощности, вход которого соединен с выходом модулятора, выход сумматора соединен со вторым входом циркулятора, первый вход которого соединен с антенной, а выход - со вторым входом смесителя, выход которого соединен с входами преобразователя частоты и фильтра доплеровских частот, выход которого соединен с входом второго регистратора скорости, выход которого соединен с первым входом вычислителя опасного расстояния по дальности, путевой скорости и скорости сближения, выход преобразователя частоты через детектор соединен с первыми входами регистратора дальности и первого регистратора скорости, выход модулятора соединен с вторыми входами первого регистратора скорости и регистратора дальности, выход которого соединен с вторым входом вычислителя опасного расстояния по дальности, путевой скорости и скорости сближения, выход первого регистратора скорости соединен с третьим входом вычислителя опасного расстояния по дальности, путевой скорости и скорости сближения, вход схемы управления положением антенны связан со вторым выходом вычислителя опасного расстояния по дальности, путевой скорости и скорости сближения, первый выход вычислителя опасного расстояния по дальности, путевой скорости и скорости сближения связан с первой исполнительной схемой, выход которой соединен с источником звука, третий - с входом второй исполнительной схемы, выход которой связан с дроссельной заслонкой, четвертый - с первым входом сравнителя, второй вход которого соединен с выходом циркулятора, а выход - с четвертой исполнительной схемой, выход которой соединен со световой сигнализацией, пятый выход вычислителя опасного расстояния по дальности, путевой скорости и скорости сближения связан с модулятором, выход которого через сравнитель связан с антенной обмена данными между объектами колонны, а шестой - с третьей исполнительной схемой, выход которой соединен с блоком управления антиблокировочной системы (АБС).
Система не обеспечивает автоматического формирования и ведения группы транспортных средств развернутой цепью и обратного автоматического преобразования цепи транспортных средств в колонну.
В качестве прототипа принята система, реализующая способ-прототип, описанная в патенте «Способ управления курсом движения машины» (SU 1131487, МПК: A01B 69/04, G05D 1/02, опубл. 30.12.84. Бюл. №48). Система включает в себя, размещаемые в поле: первый и второй источники звуковых сигналов, входы которых связаны соответственно с первым и вторым выходами основного источника электромагнитных сигналов, дополнительный источник электромагнитных сигналов, своим входом соединенный с выходом первого звукового приемника и размещаемые на борту машины: второй приемник звуковых сигналов, выход которого связан со входами первого и второго электрических фильтров, выходы которых соединены с первыми входами первого и второго датчиков времени, соответственно, приемник электромагнитных сигналов, своим выходом связанный со входами третьего и четвертого электрических фильтров, выход четвертого электрического фильтра связан с первым входом третьего датчика времени, выход третьего электрического фильтра связан со вторыми входами первого, второго и третьего датчиков времени, выходы первого и второго датчиков времени связаны с первым и вторым входами арифметического устройства, соответственно, выход третьего датчика времени связан со входом множительно-делительного устройства, выход которого связан с третьим входом арифметического устройства, выход которого является выходом системы на котором формируются сигналы управления для приводов машины. Все источники сигналов используют различающиеся между собой частоты. Система работает в соответствии с ранее описанным способом.
Для группового вождения дорожно-уборочных машин в мегаполисах система-прототип неприменима, поскольку требует для своего использования больших затрат по оборудованию тысяч улиц источниками электромагнитных и звуковых сигналов. Кроме того, система обеспечивает групповое вождение дорожных машин цепью лишь по траекториям в виде параллельных прямых линий, а улицы городов часто бывают криволинейными. Система не позволяет оперативно изменять количество дорожных машин в развернутой цепи под стать ширине обрабатываемых дорог и не обеспечивает регулирование продольной безопасной дистанции между машинами в группе в зависимости от скорости ее движения.
Задачей изобретения является автоматизация вождения дорожно-уборочных машин колонной и развернутой цепью, например, при чистке дорог от снега и грязи.
Техническим результатом изобретения является повышение производительности труда операторов дорожно-уборочных машин.
Технический результат обеспечивается за счет того, что в способ группового вождения дорожных дронов, в котором периодически излучают электромагнитные, преимущественно радиочастотные, сигналы, излучают два рода акустических, преимущественно ультразвуковых, сигналов, первый из которых возбуждают одновременно с каждым электромагнитным сигналом, принимают электромагнитные и акустические сигналы, определяют расстояния от излучателя акустических сигналов до двух датчиков акустических сигналов по временным задержкам их приема относительно соответствующих электромагнитных сигналов и автоматически управляют курсом движения каждого дорожного дрона по предварительно формируемым сигналам рассогласования вводят следующие дополнительные действия:
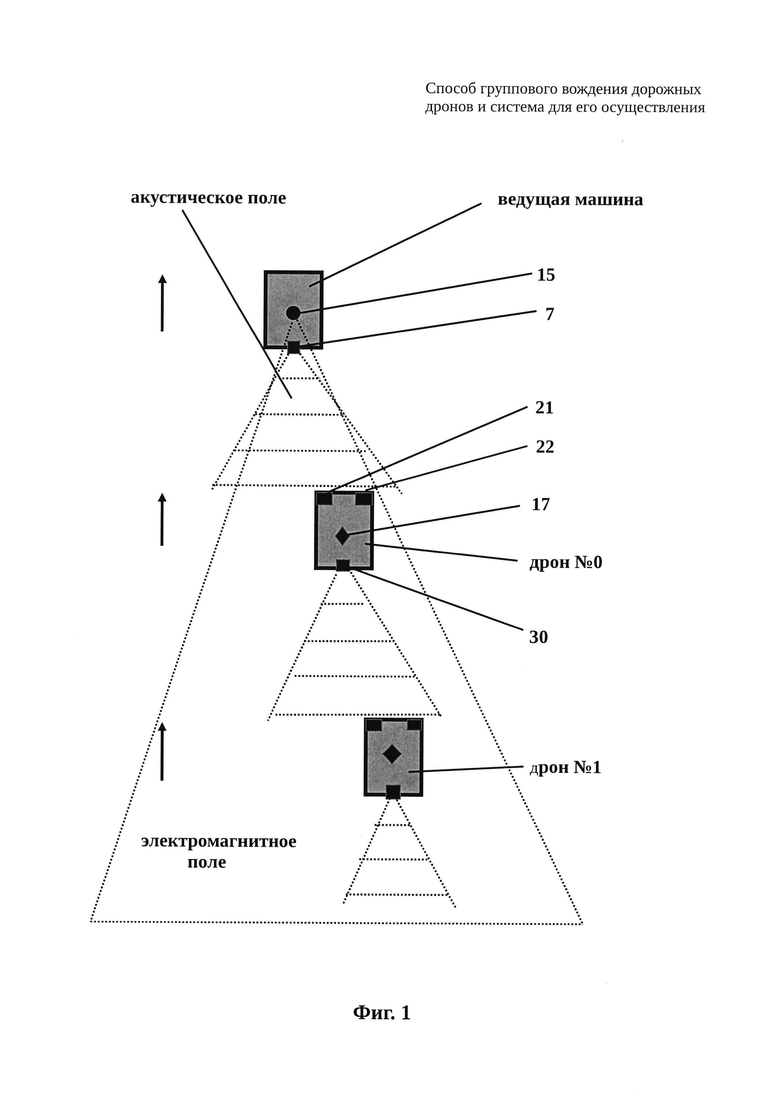
- электромагнитные сигналы излучают с борта ведущей машины с ориентацией диаграммы направленности излучения в заднее полупространство машины, акустические сигналы первого рода излучают с позиции середины задней части ведущей машины с ориентацией диаграммы направленности излучения в заднее полупространство машины, тиражируют излучение акустических сигналов второго рода по количеству дронов в группе с размещением позиций их излучения в середине задней части каждого дрона с ориентацией их диаграмм направленности в заднее полупространство дронов, принимают электромагнитные сигналы на борту каждого дрона группы, принимают акустические сигналы на борту каждого дрона группы в позициях симметрично относительно середины и ближе к краям фронтальной его части;
- предварительно под ручным управлением расставляют группу дорожных машин колонной, с ведущей машиной во главе, присваивают им идентификационные порядковые номера от нуля, для дрона ближайшего к ведущей машине, с возрастанием в сторону хвоста колонны и устанавливают необходимое для выполнения групповой работы боковое смещение каждого дрона относительно ближайшей спереди машины;
для ведущей машины:
- после установки всей группы машин в исходное состояние, ручным или автоматическим образом перемещают ведущую машину по дороге в соответствии с планом дорожно-уборочных работ и формируют по ходу движения необходимые команды режимов вождения дронов и областей действия указанных режимов;
- преобразуют команды режимов вождения дронов и пролонгации указанных режимов в циклическую командную синхропоследовательность, в которой каждый цикл начинается с командного сигнала, несущего в себе значение текущей команды оператора по режиму вождения дронов, за которым следуют сигналы «пролонгация команды», за которыми следуют сигналы «отмена команды», причем указанные типы сигналов имеют признаки отличия друг от друга, а период следования сигналов не меньше времени прохождения акустического сигнала между соседними машинами в группе;
- модулируют электромагнитное излучение командной синхропоследовательностью и обеспечивают возбуждение своего излучения акустических сигналов в течение кванта времени командного сигнала командной синхропоследовательности;
для каждого дорожного дрона:
- идентифицируют значение сигналов в каждом цикле принимаемой командной синхропоследовательности и обеспечивают счет в пределах указанного цикла каждого сигнала, считая номер командного сигнала нулевым;
- обеспечивают прием акустических сигналов на время совпадения номера сигнала в очередном цикле принятой командной синхропоследовательности с идентификационным номером дрона;
- возбуждают свое излучение акустических сигналов второго рода на время совпадения номера сигнала в очередном цикле принятой командной синхропоследовательности с увеличенным на единицу идентификационным номером дрона;
- при приеме в очередном цикле принятой командной последовательности команды «торможение» блокируют (отключают) управление скоростью движения дрона и одновременно включают торможение дрона до прихода очередной команды, отличной от команды «торможение»;
- при приеме в очередном цикле командной синхропоследовательности команды «колонна», одновременном совпадении номера принимаемого сигнала в этом цикле с идентификационным номером дрона и типе «команда» или «пролонгация команды» указанного сигнала, до приема цикла с другой командой, курсом дрона управляют по критерию минимизации рассогласования между текущими расстояниями от позиции акустического излучения ближайшего спереди дрона или ведущей машины до позиций приема указанного излучения на рассматриваемом дроне;
- при приеме в очередном цикле командной синхропоследовательности команды «цепью вправо», одновременном совпадении номера принимаемого сигнала в этом цикле с идентификационным номером дрона и типе «команда» или «пролонгация команды» указанного сигнала, до приема цикла с другой командой, курсом дрона управляют по критерию минимизации рассогласования между текущими расстояниями от позиции акустического излучения ближайшего спереди дрона или ведущей машины до позиций приема указанного излучения на рассматриваемом дроне с добавлением установочного положительного смещения;
- при приеме в очередном цикле командной синхропоследовательности команды «цепью влево», одновременном совпадении номера принимаемого сигнала в этом цикле с идентификационным номером дрона и типе «команда» или «пролонгация команды» указанного сигнала, до приема цикла с другой командой, курсом дрона управляют по критерию минимизации рассогласования между текущими расстояниями от позиции акустического излучения ближайшего спереди дрона или ведущей машины до позиций приема указанного излучения на рассматриваемом дроне с вычитанием установочного положительного смещения;
- при приеме в очередном цикле принятой командной последовательности команды «колонна», «цепью влево» или «цепью вправо», до приема цикла с командой «торможение», управляют скоростью движения дрона по критерию минимизации рассогласования разности расстояния, равного безопасной дистанции до ближайшего впереди дрона, например расстояния в метрах численно равного половине текущей скорости дрона, и половины суммы расстояний от позиции акустического излучения ближайшего спереди дрона или ведущей машины до позиций приема указанного излучения на рассматриваемом дроне;
причем мощность излучаемых электромагнитных сигналов задают достаточной для достижения всех дронов группы, мощность излучаемых акустических сигналов задают достаточной для достижения ближайшего сзади дрона, а длительность электромагнитных и акустических сигналов задают меньшей времени прохождения акустическим сигналом дистанции между двумя соседними дорожными машинами во всем диапазоне скоростей движения группы.
Технический результат обеспечивается также за счет того, что в систему группового вождения дорожных дронов, содержащую излучатель электромагнитных, преимущественно радиочастотных, сигналов, первый и второй излучатели акустических сигналов, датчик электромагнитных сигналов, а также первый и второй датчики акустических сигналов дополнительно введены:
на борту ведущей машины в составе командно-задающего устройства: первый генератор импульсов, шифратор, датчик степени пролонгации команд, датчик команд режимов движения, кольцевой счетчик, первый компаратор, логический элемент ИЛИ-НЕ, первый, второй, третий, четвертый, пятый и шестой ждущие мультивибраторы, первый логический элемент ИЛИ,
причем выход первого генератора импульсов связан с первым входом первого излучателя акустических сигналов, первым входом первого ждущего мультивибратора, входом кольцевого счетчика и входом шестого ждущего мультивибратора, линии шины выхода датчика степени пролонгации команд соединены с одноименными линиями шины входа шифратора, линии шины выхода шифратора связаны с одноименными линиями шины первого входа первого компаратора, линии шины выхода кольцевого счетчика связаны с одноименными линиями шины входа логического элемента ИЛИ-НЕ и шины второго входа первого компаратора, выход первого компаратора соединен со вторым входом первого ждущего мультивибратора, выход логического элемента ИЛИ-НЕ связан с первыми входами второго, третьего, четвертого и пятого ждущих мультивибраторов и вторым входом первого излучателя акустических сигналов, первая, вторая, третья, четвертая линии шины выхода датчика команд режима движения связаны со вторыми входами соответственно второго, третьего, четвертого и пятого ждущих мультивибраторов, выход шестого ждущего мультивибратора соединен с первым входом первого логического элемента ИЛИ, выходы первого, второго, третьего, четвертого и пятого ждущих мультивибраторов соединены соответственно с первой, второй, третьей, четвертой и пятой линиями шины второго входа первого логического элемента ИЛИ, выход которого связан с входом излучателя электромагнитных сигналов,
на борту каждого дорожного дрона в составе устройства его управления введены:
первый, второй, третий и четвертый счетчики, датчик идентификационного номера, второй и третий генераторы импульсов, второй компаратор, первый и второй RS-триггеры, постоянное запоминающее устройство (ПЗУ) идентификации команд, седьмой и восьмой ждущие мультивибраторы, второй логический элемент ИЛИ, первый и второй сумматоры, первый, второй и третий регистры, цифровой спидометр, первый вычитатель, второй вычитатель, датчик установочного смещения, привод торможения, ПЗУ-управления смещением, сервопривод скорости движения, сервопривод рулевого механизма,
причем выход датчика электромагнитных сигналов связан с первыми входами первого и второго счетчика, а также ПЗУ-идентификации команд, выход второго генератора импульсов связан со вторым входом первого счетчика, линии шины выхода которого связаны с одноименными линиями шины второго входа ПЗУ-идентификации команд, первая линия шины выхода которого соединена с первым входом первого регистра, третья, четвертая и пятая линии формируют шину второго входа первого регистра и шину входа второго логического элемента ИЛИ, выход которого соединен со вторым входом второго счетчика и третьим входом первого регистра, линии шины выхода второго счетчика связаны с одноименными линиями шины первого входа второго компаратора, линии шины второго входа которого связаны с одноименными линиями шины выхода датчика идентификационного номера, первый выход второго компаратора соединен с входами первого и второго датчиков акустических сигналов, второй выход связан с первыми входами первого и второго RS-триггеров, третьего и четвертого счетчиков, входом третьего генератора импульсов, а также входами седьмого и восьмого ждущих мультивибраторов, выход седьмого ждущего мультивибратора соединен с входом второго излучателя акустических сигналов, выход первого датчика акустических сигналов соединен со вторым входом первого RS-триггера, выход которого связан со вторым входом третьего счетчика, выход второго датчика акустических сигналов соединен со вторым входом второго RS-триггера, выход которого связан со вторым входом четвертого счетчика, первая линия шины выхода первого регистра связана с первым входом сервопривода скорости движения и входом привода торможения, вторая и третья линии образуют шину первого входа ПЗУ- управления смещением, выход восьмого мультивибратора соединен с первыми входами второго и третьего регистра, выход третьего генератора импульсов связан с третьими входами третьего и четвертого счетчиков, линии шины выхода третьего счетчика связаны с одноименными линиями шины первого входа первого сумматора и шины первого входа второго вычитателя, линии шины выхода четвертого счетчика связаны с одноименными линиями шины второго входа первого сумматора и шины второго входа второго вычитателя, линии шины выхода первого сумматора связаны с одноименными линиями шины первого входа первого вычитателя, линии шины второго входа которого соединены с одноименными линиями шины выхода цифрового спидометра, а линии шины выхода связаны с одноименными линиями шины второго входа второго регистра, линии шины выхода второго регистра соединены с одноименными линиями шины второго входа сервопривода скорости движения, линии шины выхода второго вычитателя связаны с одноименными линиями шины первого входа второго сумматора, линии шины второго входа которого связаны с одноименными линиями шины выхода ПЗУ-управления смещением, линии шины второго входа которого связаны с одноименными линиями шины выхода датчика установочного смещения, линии шины выхода второго сумматора связаны с одноименными линиями шины второго входа третьего регистра, линии шины выхода которого соединены с одноименными линиями шины входа сервопривода рулевого механизма.
Сопоставительный анализ показывает, что введение новых действий, блоков и связей в способ и систему группового вождения дорожных дронов обеспечивает получение в сравнении с прототипом качественно новых возможностей:
1. Исключается необходимость оборудования дорог дополнительным оборудованием.
2. За счет использования дорожных дронов с соответствующим инструментарием расширяется ширина полосы обработки дороги за один проход.
3. Появляется возможность группового вождения дорожных по криволинейным дорогам.
4. У водителя ведущей машины появляется возможность, не выходя из кабины своей машины, оперативно изменять ширину и ориентацию развертываемой цепи дорожных дронов, что нужно для обработки улиц различной ширины, к тому же часто заставленных припаркованным автотранспортом.
5. В связи с тем, что управление движением дорожных дронов осуществляется по линейным отклонениям, менее зависимых от неровностей подстилающей местности, появляется возможность расширения сферы применения изобретения.
6. Возможность развертывания цепи дронов как вправо, так и влево относительно ведущей машины позволяет водителю гибко выбирать место ведущей машины с наилучшим обзором, что актуально при обработке улиц, заставленных припаркованным автотранспортом.
В совокупности новые возможности обеспечивают не только формирование заявленного технического результата, а именно, повышение производительности труда операторов дорожно-уборочных машин, но и обеспечивают расширение области его применимости.
Сущность изобретения поясняется следующими чертежами и таблицами:
Фиг. 1 Сенсорное оснащение дорожных машин.
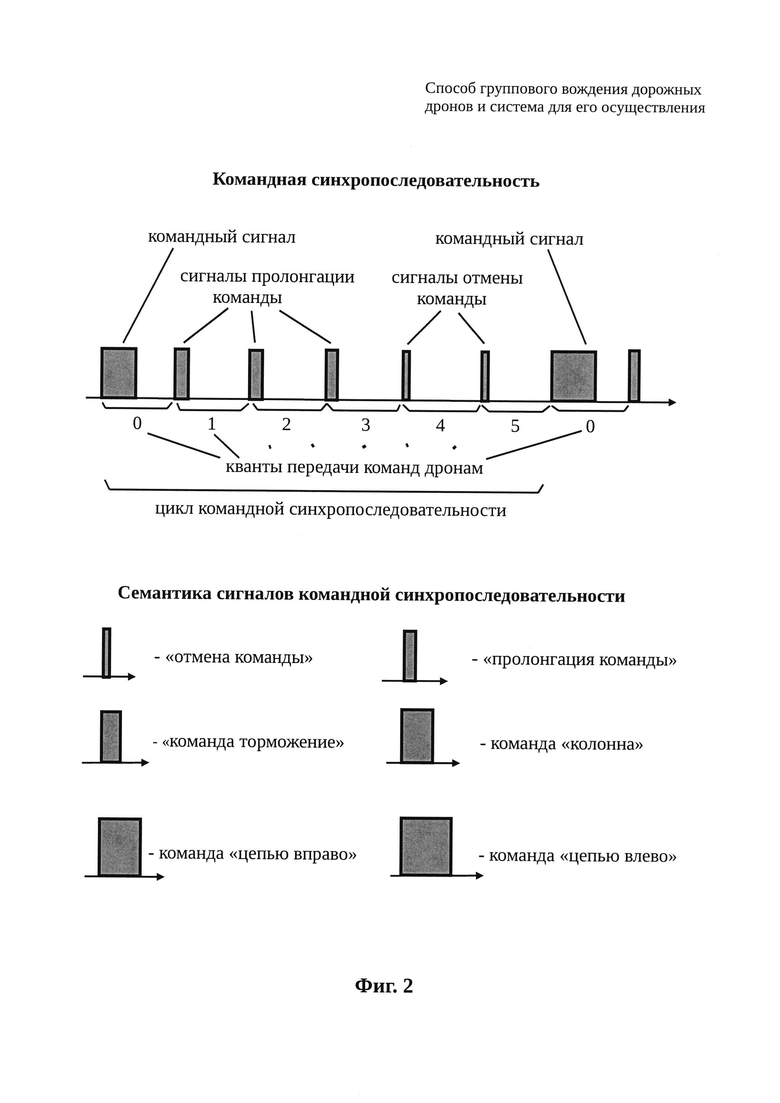
Фиг. 2 Структура командной синхропоследовательности.
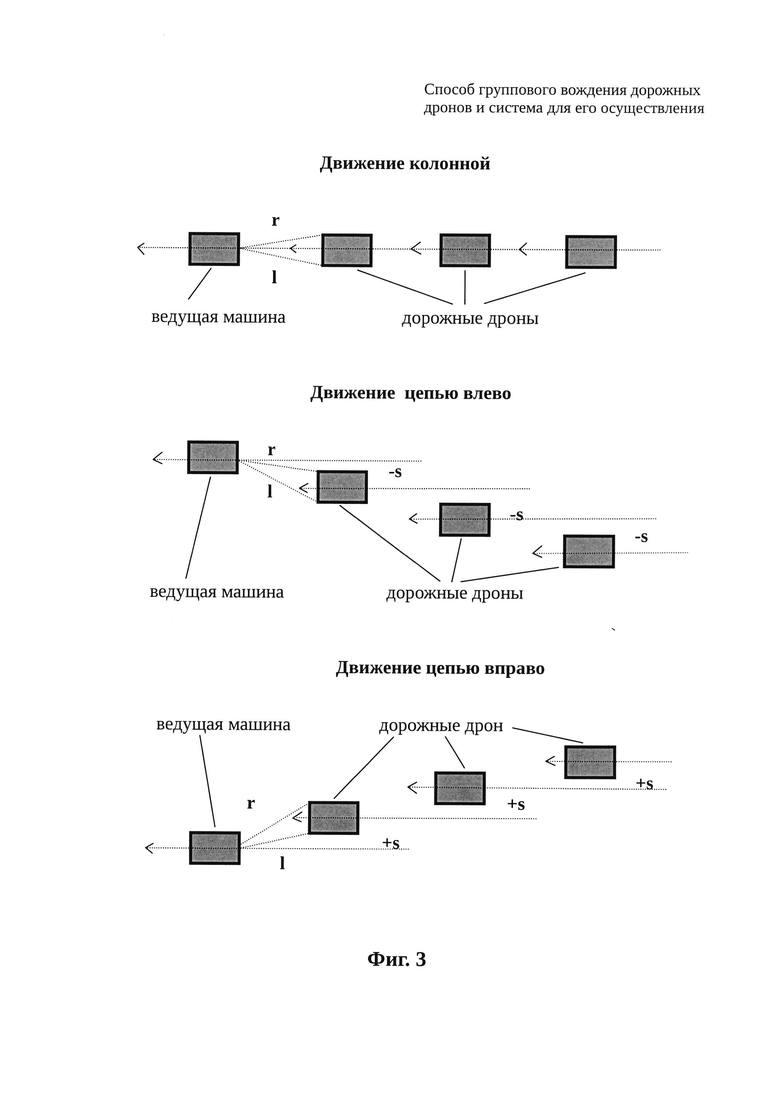
Фиг. 3 Варианты группового движения дорожных дронов.
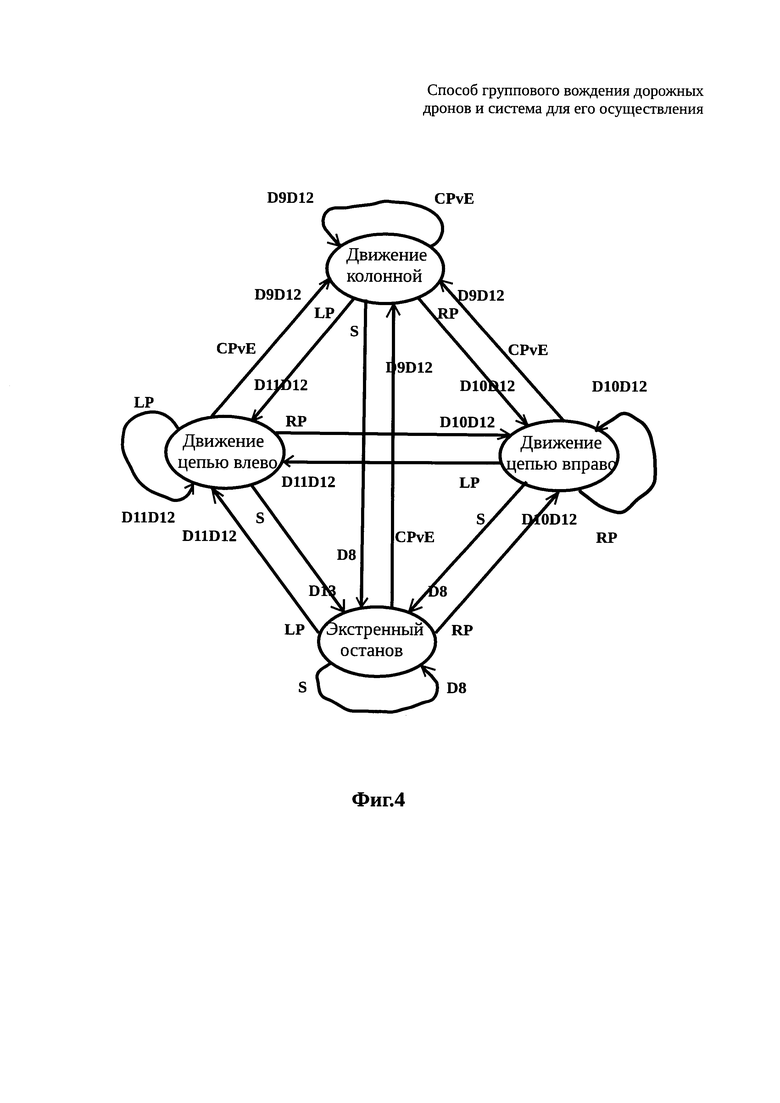
Фиг. 4 Порядок выполнения командно-зависимых действий.
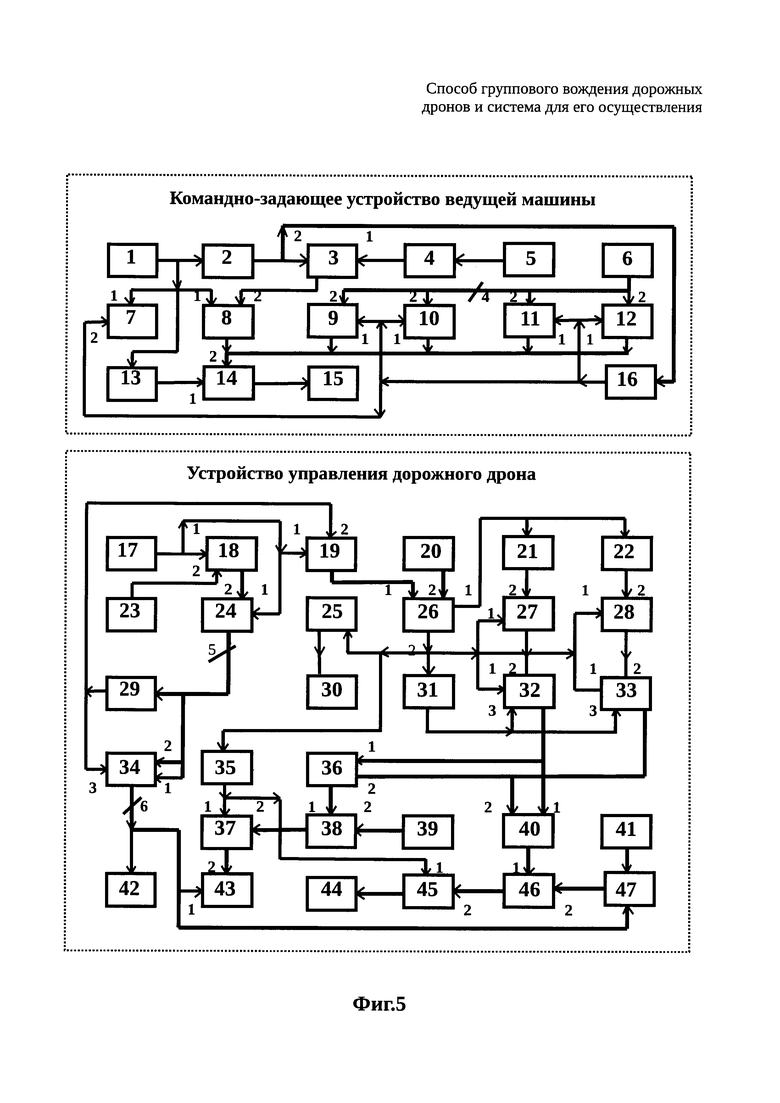
Фиг. 5 Функциональная схема системы.
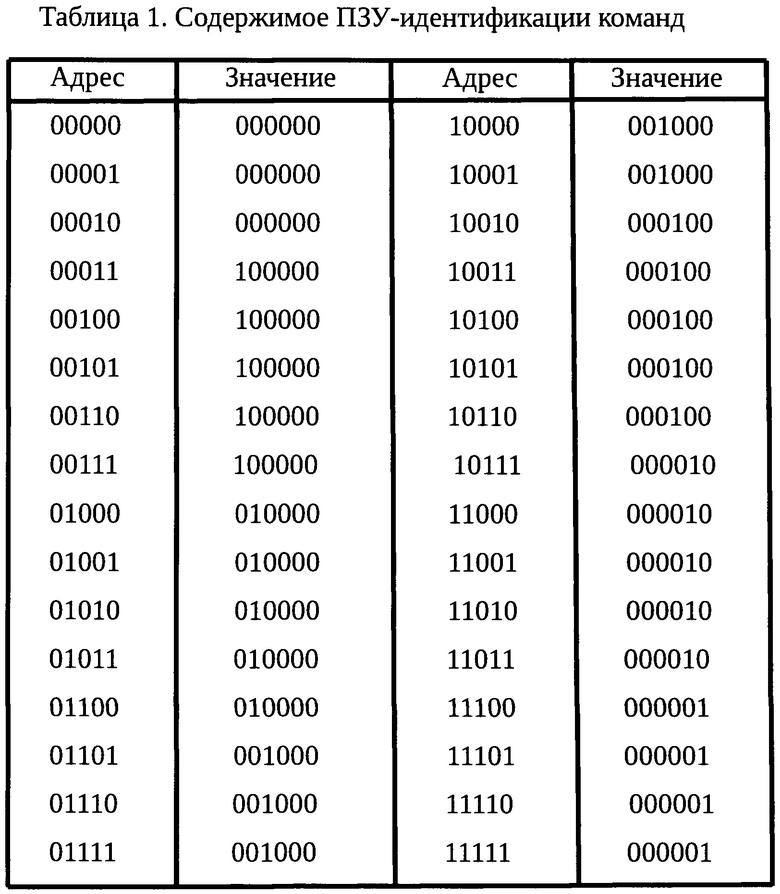
Табл. 1 Содержимое ПЗУ-идентификации команд.
Табл. 2 Значимое содержимое ПЗУ-управления смещением.
Заявляемый способ группового вождения дорожных дронов включает в себя следующие действия:
D1. Предварительно под ручным управлением расставляют группу дорожных машин колонной, с ведущей машиной во главе, присваивают им идентификационные порядковые номера от нуля, для дрона ближайшего к ведущей машине, с возрастанием в сторону хвоста колонны (фиг. 1) и устанавливают необходимое для выполнения групповой работы боковое смещение каждого дрона относительно ближайшей спереди машины.
Действия на борту ведущей машины:
D2. После установки всей группы машин в исходное состояние, ручным или автоматическим образом перемещают ведущую машину по дороге в соответствии с планом дорожно-уборочных работ и формируют по ходу движения необходимые команды режимов вождения дронов и областей действия указанных режимов.
D3. Преобразуют команды режимов вождения дронов и пролонгации указанных режимов в циклическую командную синхропоследовательность, в которой каждый цикл начинается с командного сигнала, несущего в себе значение текущей команды оператора по режиму вождения дронов, за которым следуют сигналы «пролонгация команды», за которыми следуют сигналы «отмена команды», причем указанные типы сигналов имеют признаки отличия друг от друга (фиг. 2), а период следования сигналов не меньше времени прохождения акустического сигнала между соседними машинами в группе.
D4. Возбуждают электромагнитное излучение с модулированием его командной синхропоследовательностью и излучают свои акустические сигналы синхронно с действием командных сигналов командной синхропоследовательности.
Действия на борту каждого дорожного дрона:
D5. Принимают электромагнитные сигналы на борту каждого дрона группы, преобразуют их в цифровую форму, и формируют копию командной синхропоследовательности, идентифицируют значение сигналов в каждом цикле принимаемой командной синхропоследовательности и обеспечивают счет в пределах каждого цикла каждого сигнала, считая номер командного сигнала нулевым.
D6. Принимают акустические сигналы во время совпадения номера сигнала в очередном цикле принятой командной синхропоследовательности с идентификационным номером дрона, преобразуют их в цифровую форму и определяют расстояния от позиции излучения акустических сигналов ближайшей впереди машины до позиций приема акустических сигналов на рассматриваемом дроне по временным задержкам их приема относительно соответствующих электромагнитных сигналов (фиг. 3).
D7. Излучают свои акустические сигналы второго рода во время совпадения номера сигнала в очередном цикле принятой командной синхропоследовательности с увеличенным на единицу идентификационным номером дрона (фиг. 1).
D8. При приеме в очередном цикле командной последовательности команды «торможение» блокируют (отключают) управление скоростью движения дрона и одновременно включают торможение дрона до прихода очередной команды, отличной от команды «торможение» (фиг. 4).
D9. При приеме в очередном цикле командной синхропоследовательности команды «колонна», одновременном совпадении номера принимаемого сигнала в этом цикле с идентификационным номером дрона и типе «команда» или «пролонгация команды» или «отмена команды» указанного сигнала, до приема цикла с другой командой, курсом дрона управляют по критерию минимизации рассогласования между текущими расстояниями от позиции акустического излучения ближайшего спереди дрона или ведущей машины до позиций приема указанного излучения на рассматриваемом дроне (фиг. 3).
D10. При приеме в очередном цикле командной синхропоследовательности команды «цепью вправо», одновременном совпадении номера принимаемого сигнала в этом цикле с идентификационным номером дрона и типе «команда» или «пролонгация команды» указанного сигнала, до приема цикла с другой командой, курсом дрона управляют по критерию минимизации рассогласования между текущими расстояниями от позиции акустического излучения ближайшего спереди дрона или ведущей машины до позиций приема указанного излучения на рассматриваемом дроне с добавлением установочного положительного смещения (фиг. 3).
D11. При приеме в очередном цикле командной синхропоследовательности команды «цепью влево», одновременном совпадении номера принимаемого сигнала в этом цикле с идентификационным номером дрона и типе «команда» или «пролонгация команды» указанного сигнала, до приема цикла с другой командой, курсом дрона управляют по критерию минимизации рассогласования между текущими расстояниями от позиции акустического излучения ближайшего спереди дрона или ведущей машины до позиций приема указанного излучения на рассматриваемом дроне с вычитанием установочного положительного смещения (фиг. 3).
D12. При приеме в очередном цикле принятой командной последовательности команды «колонна», «цепью влево» или «цепью вправо», до приема цикла с командой «торможение», управляют скоростью движения дрона по критерию минимизации рассогласования разности расстояния, равного безопасной дистанции до ближайшего впереди дрона, например расстояния в метрах численно равного половине текущей скорости дрона, и половины суммы расстояний от позиции акустического излучения ближайшего спереди дрона или ведущей машины до позиций приема указанного излучения на рассматриваемом дроне (фиг. 3).
Причем мощность излучаемых электромагнитных сигналов задают достаточной для достижения всех дронов группы, мощность излучаемых акустических сигналов задают достаточной для достижения ближайшего сзади дрона, а длительность электромагнитных и акустических сигналов задают меньшей времени прохождения акустическим сигналом дистанции между двумя соседними дорожными машинами во всем диапозоне скоростей движения группы.
Действие D1 выполняют перед каждым сеансом группового вождения дорожных дронов. Действия D2, D3, D4, D5, D6, D7 повторяют непрерывно и одновременно в процессе каждого сеанса группового вождения дронов. Каждое из действий D8, D9, D10, D11, D12 выполняют в зависимости от команд водителя ведущей машины и текущего режима движения каждого дрона (фиг. 4).
Заявляемый способ группового вождения дорожных дронов работает следующим образом. Действие D1 выполняют перед каждым сеансом группового вождения дорожных дронов. Согласно этому действию, под ручным управлением расставляют группу дорожных машин колонной, с ведущей машиной во главе, присваивают им идентификационные порядковые номера от нуля, для дрона ближайшего к ведущей машине, с возрастанием в сторону хвоста колонны (фиг. 1) и устанавливают необходимое для выполнения групповой работы боковое смещение s каждого дрона относительно ближайшей спереди машины (фиг. 3). Все последующие действия выполняют в процессе сеанса группового вождения дорожных дронов. На борту ведущей машины непрерывно и одновременно выполняют действия D2, D3, D4. В соответствии с действием D2, ручным или автоматическим образом перемещают ведущую машину по дороге в соответствии с планом дорожно-уборочных работ и формируют по ходу движения необходимые команды режимов вождения дронов и пролонгации указанных режимов. В частности, колонной дроны ведут к месту проведения уборочных работ и обратно, а цепью ведут при выполнении указанных работ [1]. По действию D3 преобразуют команды режимов вождения дронов и областей действия указанных режимов в циклическую командную синхропоследовательность (фиг. 2), в которой каждый цикл начинается с командного сигнала, несущего в себе значение текущей команды оператора по режиму вождения дронов, за которым следуют сигналы «пролонгация команды», за которыми следуют сигналы «отмена команды», причем указанные типы сигналов имеют признаки отличия друг от друга, например по длительности (фиг. 2), а период следования сигналов не меньше времени прохождения акустического сигнала между соседними машинами в группе. По действию D4 возбуждают электромагнитное излучение, модулируя его командной синхропоследовательностью, и излучают свои акустические сигналы во время действия командных сигналов командной синхропоследовательности.
На борту каждого дорожного дрона непрерывно и одновременно выполняют действия D5, D6, D7 и эпизодически действия D8, D9, D10, D11, D12. По действию D5 принимают электромагнитное излучение, преобразуют его в цифровую форму, формируют копии принимаемых командных синхропоследовательностей, идентифицируют значения составляющих их сигналов и обеспечивают счет в пределах каждого цикла каждого сигнала, считая номер командного сигнала нулевым. Согласно действию D6 принимают акустические сигналы от ближайшего впереди дрона и определяют расстояния от позиции излучения акустических сигналов этой машины до позиций приема акустических сигналов на рассматриваемом дроне по временным задержкам их приема относительно соответствующих электромагнитных сигналов. По действию D7 с борта дрона излучают акустические сигналы второго рода во время совпадения номера сигнала в очередном цикле принятой командной синхропоследовательности с увеличенным на единицу идентификационным номером дрона (фиг. 1). Действия D8, D9, D10, D11, D12 являются командно зависимыми. Инициаторами выполнения таких действий являются сигналы принимаемой на борту дрона командной синхропоследовательности. В составе командной синхропоследовательности могут присутствовать сигналы следующих типов: E - отмена команды, P - пролонгация команды, S - команда «торможение», R - команда «цепью вправо», L - команда «цепью влево», C - команда «колонна». Указанные сигналы при использовании, например широтно-импульсной модуляции, будут различаться шириной импульса (фиг. 2). Порядок выполнения командно-зависимых действий однозначно определяется полным графом (фиг. 4), в котором в качестве стабильных состояний рассматриваются возможные режимы группового движения дронов, дуги определяют возможные переходы между состояниями, причем командные сигналы играют роль условий переходов, а в качестве выходных сигналов выступают выполняемые действия. В частности, из режима «движение колонной» при наличии команды «цепью вправо» осуществляется переход к режиму движения «цепью вправо» посредством одновременного выполнения действий D10, что обозначено дугой RP→D10D12. По действию D10 управление курсом дрона осуществляют по критерию минимизации рассогласования Δ между текущими расстояниями от позиции акустического излучения ближайшего спереди дрона или ведущей машины до левой l и правой r позиций приема акустического излучения рассматриваемого дрона с добавлением установочного смещения s, т.е. Δ~l-r+s. По действию D12 обеспечивают управление скоростью движения дрона по критерию минимизации рассогласования δ безопасной дистанции до ближайшего впереди дрона b, например расстояния в метрах численно равного половине текущей скорости дрона [2], и половины суммы расстояний от позиции акустического излучения ближайшего спереди дрона или ведущей машины до левой l и правой r позиций приема акустического излучения рассматриваемого дрона (фиг. 3), т.е. δ~b-(r+l)/2.
Из режима «движение колонной» при наличии команды «цепью влево» осуществляется переход к режиму «движение цепью влево» посредством одновременного выполнения действий D11 и D12, что обозначено дугой LP→D11D12. По действию D11 курсом дрона управляют по критерию минимизации рассогласования Δ между текущими расстояниями от позиции акустического излучения ближайшего спереди дрона или ведущей машины до левой l и правой r позиций приема акустического излучения рассматриваемого дрона с вычитанием установочного смещения s, т.е. Δ~l-r-s. По действию D12 скоростью движения дрона управляют по критерию минимизации рассогласования δ безопасной дистанции до ближайшего впереди дрона b и половины суммы расстояний от позиции акустического излучения ближайшего спереди дрона или ведущей машины до левой l и правой r позиций приема акустического излучения рассматриваемого дрона, т.е. δ~b-(r+l)/2.
Из режима «движение колонной» при наличии команды «торможение» осуществляется переход к режиму движения «экстренный останов», что обозначено дугой S→D8. По действию D8 блокируют (отключают) управление скоростью движения дрона и одновременно включают торможение дрона до прихода очередной команды, отличной от команды «торможение».
Из режима «движение колонной» при пролонгировании команды «колонна» или приеме сигнала «отмена команды» для данного дрона подтвержают режим «движение колонной» одновременным выполнением действий D9 и D12, что на графе соответствует дуге CPvE→D9D12, где символ v означает операцию логической дизъюнкции. При этом сигналы рассогласования для курсового Δ и скоростного δ управления дроном формируют, соответственно, как Δ~l-r и δ~b-(r+l)/2.
Из режима «движение цепью вправо» при наличии команды «колонна» или «отмена команды» осуществляется переход к режиму движения «движение колонной» посредством одновременного выполнения действий D9 и D12, что обозначено дугой CPvE→D9D12. По действию D9 курсом дрона управляют по критерию минимизации рассогласования между текущими расстояниями от позиции акустического излучения ближайшего спереди дрона или ведущей машины до левой l и правой r позиций приема акустического излучения рассматриваемого дрона, т.е. Δ~l-r. По действию D12 скоростью движения дрона управляют по критерию минимизации рассогласования безопасной дистанции до ближайшего впереди дрона b и половины суммы расстояний от позиции акустического излучения ближайшего спереди дрона или ведущей машины до левой l и правой r позиций приема акустического излучения рассматриваемого дрона, т.е. δ~b-(r+l)/2.
Из режима «движение цепью вправо» при наличии команды «цепью влево» осуществляется переход к режиму «движение цепью влево» посредством одновременного выполнения действий D11 и D12, что обозначено дугой LP→D11D12. По действию D11 курсом дрона управляют по критерию минимизации рассогласования между текущими расстояниями от позиции акустического излучения ближайшего спереди дрона или ведущей машины до левой l и правой r позиций приема акустического излучения рассматриваемого дрона с вычитанием установочного смещения s, т.е. Δ~l-r-s. По действию D12 скоростью движения дрона управляют по критерию минимизации рассогласования безопасной дистанции до ближайшего впереди дрона b и половины суммы расстояний от позиции акустического излучения ближайшего спереди дрона или ведущей машины до левой l и правой r позиций приема акустического излучения рассматриваемого дрона, т.е. δ~b-(r+l)/2.
Из режима «движение цепью вправо» при наличии команды «торможение» осуществляется переход к режиму движения «экстренный останов», что обозначено дугой S→D8. По действию D8 блокируют (выключают) управление скоростью движения дрона и одновременно включают торможение дрона до прихода очередной команды, отличной от команды «торможение».
Из режима «движение цепью вправо» при наличии команды «цепью вправо» для данного дрона подтвержают режим «движение цепью вправо» одновременным выполнением действий D10 и D12, что на графе соответствует дуге RP→D10D12. По действию D10 курсом дрона управляют по критерию минимизации рассогласования между текущими расстояниями от позиции акустического излучения ближайшего спереди дрона или ведущей машины до левой l и правой r краев фронтальной части рассматриваемого дрона с добавлением установочного смещения, т.е. Δ~l-r+s. По действию D12 обеспечивают управление скоростью движения дрона по критерию минимизации рассогласования безопасной дистанции до ближайшего впереди дрона b и половины суммы расстояний от позиции акустического излучения ближайшего спереди дрона или ведущей машины до левой l и правой r позиций рассматриваемого дрона, т.е. δ~b-(r+l)/2.
Из режима «движение цепью влево» при наличии команды «колонна» или «отмена команды» осуществляется переход к режиму движения «движение колонной» посредством одновременного выполнения действий D9 и D12, что обозначено дугой CPvE→D9D12. По действию D9 курсом дрона управляют по критерию минимизации рассогласования между текущими расстояниями от позиции акустического излучения ближайшего спереди дрона или ведущей машины до левой l и правой r позиций приема акустического излучения рассматриваемого дрона, т.е. Δ~l-r. По действию D12 обеспечивают управление скоростью движения дрона по критерию минимизации рассогласования безопасной дистанции до ближайшего впереди дрона b и половины суммы расстояний от позиции акустического излучения ближайшего спереди дрона или ведущей машины до левой l и правой r позиций приема акустического излучения рассматриваемого дрона, т.е. δ~b-(r+l)/2.
Из режима «движение цепью влево» при наличии команды «цепью вправо» осуществляется переход к режиму «движение цепью вправо» посредством одновременного выполнения действий D10 и D12, что обозначено дугой RP→D10D12. По действию D10 курсом дрона управляют по критерию минимизации рассогласования между текущими расстояниями от позиции акустического излучения ближайшего спереди дрона или ведущей машины до левой l и правой r позиций приема акустического излучения рассматриваемого дрона с добавлением установочного смещения, т.е. Δ~l-r+s. По действию D12 скоростью движения дрона управляют по критерию минимизации рассогласования безопасной дистанции до ближайшего впереди дрона b и половины суммы расстояний от позиции акустического излучения ближайшего спереди дрона или ведущей машины до левой l и правой r позиций приема акустического излучения рассматриваемого дрона, т.е. δ~b-(r+l)/2.
Из режима «движение цепью влево» при наличии команды «торможение» осуществляется переход к режиму движения «экстренный останов», что обозначено дугой S→D8. По действию D8 блокируют (выключают) управление скоростью движения дрона и одновременно включают торможение дрона до прихода очередной команды, отличной от команды «торможение».
Из режима «движение цепью влево» при наличии команды «цепью влево» для данного дрона подтвержают режим «движение цепью влево» одновременным выполнением действий D11 и D12, что на графе соответствует дуге LP→D11D12. По действию D11 курсом дрона управляют по критерию минимизации рассогласования между текущими расстояниями от позиции акустического излучения ближайшего спереди дрона или ведущей машины до левой l и правой r позиций приема акустического излучения рассматриваемого дрона с вычитанием установочного смещения, т.е. Δ~l-r-s. По действию D12 скоростью движения дрона управляют по критерию минимизации рассогласования безопасной дистанции до ближайшего впереди дрона b и половины суммы расстояний от позиции акустического излучения ближайшего спереди дрона или ведущей машины до левой l и правой r позиций приема акустического излучения рассматриваемого дрона, т.е. δ~b-(r+l)/2.
Из режима «экстренный останов» при наличии команды «колонна» или команды «отмена команды» осуществляется переход к режиму движения «движение колонной» посредством одновременного выполнения действий D9 и D12, что обозначено дугой CP→D9D12. По действию D9 курсом дрона управляют по критерию минимизации рассогласования между текущими расстояниями от позиции акустического излучения ближайшего спереди дрона или ведущей машины до левой l и правой r позиций приема акустического излучения рассматриваемого дрона, т.е. Δ~l-r. По действию D12 обеспечивают управление скоростью движения дрона по критерию минимизации рассогласования безопасной дистанции до ближайшего впереди дрона b и половины суммы расстояний от позиции акустического излучения ближайшего спереди дрона или ведущей машины до левой l и правой r позиций приема акустического излучения рассматриваемого дрона, т.е. δ~b-(r+l)/2.
Из режима «экстренный останов» при наличии команды «цепью вправо» осуществляется переход к режиму «движение цепью вправо» посредством одновременного выполнения действий D10 и D12, что обозначено дугой RP→D10D12. По действию D10 курсом дрона управляют по критерию минимизации рассогласования между текущими расстояниями от позиции акустического излучения ближайшего спереди дрона или ведущей машины до левой l и правой r позиций приема акустического излучения рассматриваемого дрона с добавлением установочного смещения, т.е. Δ~l-r+s. По действию D12 управляют скоростью движения дрона по критерию минимизации рассогласования безопасной дистанции до ближайшего впереди дрона b и половины суммы расстояний от позиции акустического излучения ближайшего спереди дрона или ведущей машины до левой l и правой r позиций приема акустического излучения рассматриваемого дрона, т.е. δ~b-(r+l)/2.
Из режима «экстренный останов» при наличии команды «цепью влево» осуществляется переход к режиму «движение цепью влево» посредством одновременного выполнения действий D11 и В12, что обозначено дугой LP→D11D12. По действию D11 курсом дрона управляют по критерию минимизации рассогласования между текущими расстояниями от позиции акустического излучения ближайшего спереди дрона или ведущей машины до левой l и правой r позиций приема акустического излучения рассматриваемого дрона с вычитанием установочного смещения, т.е. Δ~l-r-s. По действию D12 управляют скоростью движения дрона по критерию минимизации рассогласования безопасной дистанции до ближайшего впереди дрона b и половины суммы расстояний от позиции акустического излучения ближайшего спереди дрона или ведущей машины до левой l и правой r позиций приема акустического излучения рассматриваемого дрона, т.е. δ~b-(r+l)/2.
Из режима «экстренный останов» при наличии команды «торможение» для данного дрона подтвержают режим «экстренный останов» выполнением действия D8, что на графе соответствует дуге S→D8. По действию D8 блокируют управление скоростью движения дрона и одновременно включают торможение дрона до прихода очередной команды, отличной от команды «торможение».
Заявляемая система группового вождения дорожных дронов (фиг. 5) состоит из командно-задающего устройства, размещаемого на борту ведущей машины, и устройства управления, размещаемого на борту каждого дорожного дрона.
Командно-задающее устройство содержит:
1 - первый генератор импульсов,
2 - кольцевой счетчик,
3 - первый компаратор,
4 - шифратор,
5 - датчик степени пролонгации команд,
6 - датчик команд режимов движения,
7 - первый излучатель акустических сигналов,
8 - первый ждущий мультивибратор,
9 - второй ждущий мультивибратор,
10 - третий ждущий мультивибратор,
11 - четвертый ждущий мультивибратор,
12 - пятый ждущий мультивибратор,
13 - шестой ждущий мультивибратор,
14 - первый логический элемент ИЛИ,
15 - излучатель электромагнитных сигналов,
16 - логический элемент ИЛИ-НЕ,
причем выход первого генератора импульсов 1 связан с первым входом (включения/выключения) первого излучателя акустических сигналов 7, входом (пуска) шестого ждущего мультивибратора 13, первым входом (пуска) первого ждущего мультивибратора 8 и (счетным) входом кольцевого счетчика 2, линии шины выхода датчика степени пролонгации команд 5 соединены с одноименными линиями шины (информационного) входа шифратора 4, линии шины выхода шифратора 4 связаны с одноименными линиями шины первого входа (первого операнда) первого компаратора 3, линии шины выхода кольцевого счетчика 2 связаны с одноименными линиями шины входа логического элемента ИЛИ-НЕ 16 и шины второго входа (второго операнда) первого компаратора 3, выход (первый операнд не больше второго) первого компаратора 3 соединен со вторым входом (разрешения) первого ждущего мультивибратора 8, выход логического элемента ИЛИ-НЕ 16 связан с первыми входами (пуска) второго 9, третьего 10, четвертого 11 и пятого 12 ждущих мультивибраторов и вторым входом (разрешения) первого излучателя акустических сигналов 7, первая, вторая, третья, четвертая линии шины выхода датчика команд режима движения 6 связаны со вторыми входами (разрешения) соответственно второго 9, третьего 10, четвертого 11 и пятого 12 ждущих мультивибраторов, (прямой) выход шестого ждущего мультивибратора 13 соединен с первым входом первого логического элемента ИЛИ 14, (прямые) выходы первого 8, второго 9, третьего 10, четвертого 11 и пятого 12 ждущих мультивибраторов соединены соответственно с первой, второй, третьей, четвертой и пятой линиями шины второго входа первого логического элемента ИЛИ 14, выход которого связан с входом (включения/выключения) излучателя электромагнитных сигналов 15.
Устройство управления каждого дорожного дрона содержит:
17 - датчик электромагнитных сигналов,
18 - первый счетчик,
19 - второй счетчик,
20 - датчик идентификационного номера,
21 - первый датчик акустических сигналов,
22 - второй датчик акустических сигналов,
23 - второй генератор импульсов,
24 - ПЗУ- идентификации команд,
25 - седьмой ждущий мультивибратор,
26 - второй компаратор,
27 - первый RS-триггер,
28 - второй RS-триггер,
29 - второй логический элемент ИЛИ,
30 - второй излучатель акустических сигналов,
31 - третий генератор импульсов,
32 - третий счетчик,
33 - четвертый счетчик,
34 - первый регистр,
35 - восьмой ждущий мультивибратор,
36 - первый сумматор,
37 - второй регистр,
38 - первый вычитатель,
39 - цифровой спидометр,
40 - второй вычитатель,
41 - датчик установочного смещения,
42 - привод торможения,
43 - сервопривод скорости движения,
44 - сервопривод рулевого механизма,
45 - третий регистр,
46 - второй сумматор,
47 - ПЗУ-управления смещением,
причем (цифровой) выход датчика электромагнитных сигналов 17 связан с первым (счетным) входом второго 19 и первым входом (разрешения) первого 18 счетчиков, а также первым входом (запрета) ПЗУ-идентификации команд 24, выход второго генератора импульсов 23 связан со вторым (счетным) входом первого счетчика 18, линии шины (параллельного) выхода которого связаны с одноименными линиями шины второго (адресного) входа ПЗУ-идентификации команд 24, первая линия шины выхода которого связана с первым входом (сброса) первого регистра 34, третья, четвертая и пятая линии формируют шину второго (информационного) входа первого регистра 34 и шину входа второго логического элемента ИЛИ 29, выход которого соединен со вторым входом (сброса) второго счетчика 19 и третьим входом (записи) первого регистра 34, линии шины (параллельного) выхода второго счетчика 19 связаны с одноименными линиями шины первого входа (первого операнда) второго компаратора 26, линии шины второго входа (второго операнда) которого связаны с одноименными линиями шины выхода датчика идентификационного номера 20, первый выход (признака неравенства операндов) второго компаратора 26 соединен с входами (запрета) первого 21 и второго 22 датчиков акустических сигналов, второй выход (признака равенства операндов) связан с первыми (S) входами первого 27 и второго 28 RS-триггеров, первыми входами (сброса) третьего 32 и четвертого 33 счетчиков, входом (включения/выключения) третьего генератора импульсов 31, а также входами (пуска) седьмого 25 и восьмого 35 ждущих мультивибраторов, выход седьмого ждущего мультивибратора 25 соединен с входом (включения/выключения) второго излучателя акустических сигналов 30, (цифровой) выход первого датчика акустических сигналов 21 соединен со вторым (R) входом первого RS-триггера 27, (прямой) выход которого связан со вторым входом (разрешения) третьего счетчика 32, (цифровой) выход второго датчика акустических сигналов 22 соединен со вторым (R) входом второго RS-триггера 28, (прямой) выход которого связан со вторым входом (разрешения) четвертого счетчика 33, первая линия шины выхода первого регистра 34 связана с первым входом (блокировки) сервопривода скорости движения 43 и входом (включения/выключения) привода торможения 42, вторая и третья линии образуют шину первого (адресного) входа ПЗУ-управления смещением 47, (инверсный) выход восьмого мультивибратора 35 соединен с первыми входами (запрета) второго 37 и третьего 45 регистров, выход третьего генератора импульсов 31 связан с третьими (счетными) входами третьего 32 и четвертого 33 счетчиков, линии шины (параллельного) выхода третьего счетчика 32 связаны с одноименными линиями шины первого входа (первого операнда) первого сумматора 36 и шины первого входа (первого операнда) второго вычитателя 40, линии шины (параллельного) выхода четвертого счетчика 33 связаны с одноименными линиями шины второго входа (второго операнда) первого сумматора 36 и шины второго входа (второго операнда) второго вычитателя 40, линии шины выхода (группы старших разрядов) первого сумматора 36 связаны с одноименными линиями шины первого входа первого вычитателя 38, линии шины второго входа которого соединены с одноименными линиями шины выхода цифрового спидометра 39, а линии шины (информационного) выхода связаны с одноименными линиями шины второго (информационного) входа второго регистра 37, линии шины (параллельного) выхода второго регистра 37 соединены с одноименными линиями шины второго входа (рассогласования) сервопривода скорости движения 43, линии шины (информационного) выхода второго вычитателя 40 связаны с одноименными линиями шины первого входа второго (первого операнда) сумматора 46, линии шины второго входа (второго операнда) которого связаны с одноименными линиями шины (информационного) выхода ПЗУ-управления смещением 47, линии шины второго (адресного) входа которого связаны с одноименными линиями шины выхода датчика установочного смещения 41, линии шины (информационного) выхода второго сумматора 46 связаны с одноименными линиями шины второго (информационного) входа третьего регистра 45, линии шины (параллельного) выхода которого соединены с одноименными линиями шины входа (рассогласования) сервопривода рулевого механизма 44.
Заявляемая система работает следующим образом. Питание системы включают после ручного формирования колонны из дронов во главе с ведущей машиной, присваивания идентификационного номера с помощью датчика 20 (набора кнопок) и установки бокового смещения с помощью датчика 41 (набора кнопок) каждому дрону. Во избежание неконтролируемых движений дронов во время начальных установок сначала включают питание устройств управления дронов и лишь затем включают питание командно-задающего устройства ведущей машины.
Назначением командно-задающего устройства является формирование и передача дронам командной синхропоследовательности (фиг. 2), причем в заявляемой версии системы для обозначения различных сигналов синхропоследовательности использована широтно-импульсная модуляция. При включении питания командно-задающего устройства начинает работать первый генератор импульсов 1, импульсы с выхода которого поступают на счетный вход кольцевого счетчика 2, первый вход первого излучателя акустических сигналов 7, входы пуска первого 8 и шестого 13 ждущих мультивибраторов. В результате на выходе кольцевого счетчика 2 последовательно формируются значения, представляющие идентификационные номера дронов, а период генерации импульсов генератора 1 задает величину кванта времени для формирования текущих управляющих сигналов каждого дрона. С началом каждого импульса первого генератора импульсов 1 запускается шестой ждущий мультивибратор 13 с длительностью импульсов, соответствующей сигналу «отмена команды» (фиг. 2). С выхода шестого ждущего мультивибратора 13 этот импульс через первый логический элемент ИЛИ 14 проходит на вход излучателя электромагнитных сигналов 15 и фактически формируют скелет командной синхропоследовательности. Когда в кольцевом счетчике 2 под действием импульсов первого генератора 1 формируется нулевое состояние, на выходе логического элемента ИЛИ-НЕ 16 формируется единичный сигнал, который поступает на первые входы (пуска) второго 9, третьего 10, четвертого 11 и пятого 12 ждущих мультивибраторов, а также на второй вход (разрешения) первого излучателя акустических сигналов 7. В итоге первый излучатель акустических сигналов 7 формирует акустический импульс, который ведущая машина посылает в сторону ближайшего сзади дрона. Одновременно в зависимости от значения унитарного кода, снимаемого с выхода датчика команд режимов движения 6 (переключателя режимов движения) и поступающего на вторые входы (разрешения) второго 9, третьего 10, четвертого 11 и пятого 12 ждущих мультивибраторов, срабатывает один из перечисленных ждущих мультивибраторов и формирует на своем выходе импульс с длительностью, соответствующей команде оператора (фиг. 2). Этот импульс через первый логический элемент ИЛИ 14 поступает на вход излучателя электромагнитных сигналов 15. Поскольку командный импульс заведомо шире поступающего одновременно импульса шестого ждущего мультивибратора 13, то излучатель электромагнитных сигналов 15 отработает более широкий входной импульс. Таким образом, в кванте с нулевым номером формируемой командной синхропоследовательности будет представлен сигнал текущей команды оператора. Одновременно с перечислением на втором входе первого компаратора 3 идентификационных номеров дронов, на его первый вход от датчика степени пролонгации команд 5 (набор взаимно исключающих кнопок) через шифратор 4 поступает двоичный код номера последнего дрона, на который пролонгируется действие текущей команды оператора. Пока значение операнда по второму входу компаратора 3 не больше значения операнда по его первому входу, на выходе компаратора 3 формируется единичный сигнал, который поступает на второй вход (разрешения) первого ждущего мультивибратора 8. В результате в это время первый ждущий мультивибратор 8 запускается с каждым импульсом первого генератора импульсов 1 и формирует на своем выходе импульсы, соответствующие сигналам «пролонгация команды». Эти сигналы через первый логический элемент ИЛИ 14 поступают на вход (модуляции) излучателя электромагнитных сигналов 15. Поскольку сигналы «пролонгация команды» перекрывают по длительности сигналы «отмена команды» (фиг. 2), поступающие с выхода шестого ждущего мультивибратора 13, то в рассматриваемый интервал времени излучатель электромагнитных сигналов 15 будет модулироваться именно сигналом «пролонгация команды». Наконец, когда перечень дронов, на которые распространяется действие текущей команды оператора, заканчивается и на выходе первого компаратора 3 устанавливается нулевой сигнал, первый ждущий мультивибратор 8 перестает формировать импульсы и излучатель электромагнитных сигналов 15 до конца цикла командной синхропоследовательности будет модулироваться сигналами «отмена команды», формируемыми шестым ждущим мультивибратором 13. Последующие циклы командной синхропоследовательности формируются аналогичным образом.
Устройство управления дорожного дрона (фиг. 5) предназначено для приема командной синхропоследовательности в форме электромагнитных сигналов, преобразования ее в электронное представление (фиг. 2), идентификации составляющих ее сигналов-команд, приема акустических сигналов, оценке поперечного и продольного отклонений дрона от установочных значений, и минимизация указанных отклонений в процессе движения дрона с помощью своих сервоприводов скорости и рулевого механизма. При включенном питании датчик электромагнитных сигналов 17 принимает электромагнитное излучение ведущей машины и после демодуляции выдает на своем выходе сигналы командной синхропоследовательности в цифровом виде, которые поступают на первый вход (разрешения) первого счетчика 18, первый (счетный) вход второго счетчика 19 и первый вход (запрета) ПЗУ-идентификации команд 24. Одновременно с выхода второго генератора импульсов 23 импульсы поступают на второй (счетный) вход первого счетчика 18. Поскольку каждый сигнал командной синхропоследовательности играет для первого счетчика 18 роль разрешительного сигнала, то в этом счетчике в цифровой форме формируются значения длительностей сигналов принятой командной синхропоследовательности. В то же время каждый сигнал командной синхропоследовательности играет для ПЗУ-идентификации команд 24 роль запретительного сигнала. Поэтому на второй (адресный) вход ПЗУ-идентификации команд 24 код длительности очередного сигнала командной синхропоследовательности с (параллельного) выхода первого счетчика 18 проходит сразу после его завершения. Каждому типу сигналов командной синхропоследовательности в ПЗУ-идентификации команд 24 соответствует свой диапазон адресов и эти диапазоны не пересекаются. Например, если принять длительность сигнала «отмена команды» за 1 единицу, сигнала «пролонгация команды» за 2 единицы, сигнала команды «торможение» за 3 единицы, сигнала команды «цепью вправо» за 4 единицы, сигнала «цепью влево» за 5 единиц и сигнала команды «колонна» за 6 единиц, и сопоставить одной единице времени 5 периодов второго генератора 23 при 40% допустимом отклонении длительностей указанных сигналов, то идентификацию команд командной синхропоследовательности можно проводить, например, в соответствии с табл. 1, которая определяет содержимое ПЗУ-идентификации команд 24. В каждом слове этой памяти содержится унитарный код, в котором слева направо единица в 1-разряде соответствует значению «отмена команды» текущего сигнала командной синхропоследовательности, единица в 2-разряде соответствует значению «пролонгация команды», единица в 3-разряде означает команду «торможение», единица в 4-разряде соответствует команде «цепью вправо», единица в 5-разряде соответствует команде «цепью влево», единица в 6-разряде означает команду «колонна». Если очередной сигнал командной синхропоследовательности идентифицирован как сигнал команды, то единичный сигнал по одной из линий 3-, 4-, 5- или 6-разрядов шины выхода ПЗУ-идентификации команд 24 вызывает формирование единичного сигнала на выходе второго логического элемента ИЛИ 29, который поступает на третий вход (записи) первого регистра 34 и на второй вход (сброса) второго счетчика 19. Происходит запись в первый регистр 34 содержимого линий 3-, 4-, 5-, 6-разрядов шины выхода ПЗУ-идентификации команд 24, которые подключены к шине второго входа этого регистра. Одновременно происходит сброс в нулевое состояние второго счетчика 19. Поскольку второй счетчик 19 обеспечивает порядковый счет сигналов в пределах цикла командной синхропоследовательности, то командный сигнал получает номер 0. Если текущий сигнал принятой командной синхропоследовательности идентифицирован как команда «торможение», то единичный сигнал появляется на первой линии шины выхода первого регистра 34 и поступает он на вход привода торможения 42 и первый вход (блокировки) сервопривода скорости движения 43. В итоге дрон тормозит и переходит в состояние «экстренный останов». Если текущий сигнал принятой командной синхропоследовательности идентифицирован как команда «цепью вправо», «цепью влево» или "колонна", то на 2-, 3-, 4-линиях шины выхода первого регистра 34 формируется код, соответственно, 100, 010 или 001, который поступает на шину первого входа ПЗУ-управления смещением 47. В это же время по шине второго входа в ПЗУ-управления смещением 47 с выхода датчика установочного смещения 41 поступает двоичный код установочного смещения. В зависимости от текущей команды оператора и значения установочного смещения ПЗУ-управления смещением 47 формирует на своем выходе двоичный код необходимого бокового смещения дрона, который поступает по шине второго входа во второй сумматор 46. ПЗУ-управления смещением 47 табличным образом реализует логику формирования текущего смещения дрона. Значимое содержимое этого ПЗУ отражено в табл. 2, где содержимое памяти приведено лишь по реально возможным адресам в предположении значения одной двоичной единицы датчика установочных смещений 41 в 40 см и представления положительного текущего смещения в прямом коде, а отрицательного смещения в дополнительном коде. С шины выхода второго счетчика 19 порядковый номер очередного сигнала командной последовательности поступает на шину первого входа второго компаратора 26. На шину второго входа второго компаратора 26 с выхода датчика идентификационного номера 20 поступает двоичный код идентификационного номера дрона. Пока текущий номер сигнала командной синхропоследовательности не равен идентификационному номеру дрона на первом выходе второго компаратора формируется единичный сигнал, который поступает на входы (запрета) первого 21 и второго 22 датчиков акустических сигналов и блокирует их работу. Тем самым предотвращается прием данным дроном акустических сигналов от не ближайших спереди дронов. Когда текущий номер сигнала командной синхропоследовательности становится равным идентификационному номеру дрона на первом выходе второго компаратора 26 формируется нулевой сигнал и включаются в работу первый 21 и второй 22 датчики акустических сигналов. Одновременно на втором выходе второго компаратора 26 формируется единичный сигнал, который включает третий генератор импульсов 31, устанавливает в единичное состояние первый 27 и второй 28 RS-триггеры, сбрасывает в нулевое состояние третий 32 и четвертый 33 счетчики, по заднему фронту запускает седьмой ждущий мультивибратор 25, а по переднему фронту запускает восьмой ждущий мультивибратор 35. В результате сигналы, принимаемые первым 21 и вторым 22 датчиками акустических сигналов, в цифровом виде проходят на вторые (R) входы, соответственно, первого 27 и второго 28 RS-триггеров и своими передними фронтами сбрасывают указанные триггеры в нулевое состояние. Единичные сигналы с (прямых) выходов первого 27 и второго 28 RS-триггеров играют роль разрешительных сигналов, соответственно, для третьего 32 и четвертого 33 счетчиков. За указанное время разрешения в третьем 32 и четвертом 33 счетчиках происходит накопление импульсов от третьего генератора импульсов 36, которые поступают на указанные счетчики по их третьим входам. В результате к концу кванта времени командной синхропоследовательности, с номером равным идентификационному номеру дрона, в третьем 32 и четвертом 33 счетчиках формируются двоичные коды, отражающие текущие расстояния от второго излучателя акустических сигналов 30 ближайшего спереди дрона, соответственно, до первого 21 и второго 22 датчиков акустических сигналов настоящего дрона. В начале следующего кванта командной синхропоследовательности запускается седьмой ждущий мультивибратор 25, который на время действия единичного сигнала на своем прямом выходе включает в работу второй излучатель акустических сигналов 30. Тем самым формируется акустический сигнал для ближайшего сзади дрона. Коды с (параллельных) выходов третьего 32 и четвертого 33 счетчиков поступают, соответственно, на первый и второй входы первого сумматора 36 и второго вычитателя 40. С выхода второго вычитателя 40 двоичный код разности измеренных расстояний до первого 21 и второго 22 датчиков акустических сигналов поступает на первый вход второго сумматора 46, где к нему добавляется сформированное одновременно на его втором входе текущее боковое смещение. В первом сумматоре 36 двоичные коды, отражающие текущие расстояния от второго излучателя акустических сигналов 30 ближайшего спереди дрона, соответственно, до первого 21 и второго 22 датчиков акустических сигналов настоящего дрона складываются и от полученной суммы за счет игнорирования младшего разряда выводится код половины суммы, который поступает на первый вход первого вычитателя 38. На второй вход первого вычитателя 38 с выхода цифрового спидометра 39 поступает двоичный код, за счет игнорирования младшего разряда численно равный половине текущей скорости дрона. Первый вычитатель 38 формирует на своем выходе двоичный код, отображающий разность между безопасной дистанцией между дронами при текущей скорости дрона и текущего среднего расстояния между ними. При этом в качестве безопасной дистанции между дронами принимается величина численно равная половине скорости их движения (км/час), выраженная в метрах [2]. Код с выхода первого вычитателя 38 поступает по второму входу во второй регистр 37 и по заднему фронту сигнала с инверсного выхода восьмого ждущего мультивибратора 35, поступающему по первому входу (записи) второго регистра 37, сохраняется в этом регистре. Значение второго регистра 37 поступает по второму входу в сервопривод скорости движения 43 дрона и используется в качестве сигнала его продольного рассогласования. При этом восьмой ждущий мультивибратор 35 играет роль временной задержки на время формирования сигналов рассогласования для сервоприводов скорости движения 43 и рулевого механизма 44. Пока в составе принимаемой командной синхропоследовательности следуют сигналы «пролонгация команды» содержимое первого регистра 34, которое определяет характер движения дрона, не изменяется. Если при получении такого сигнала имеет место еще и совпадение порядкового номера этого сигнала, формируемого во втором счетчике 19, с идентификационным номером дрона, обеспечивается пролонгирование на данный дрон команды, заложенной в командном сигнале текущего цикла командной синхропоследовательности. Если же очередной сигнал командной синхропоследовательности идентифицирован как «отмена команды», на первой линии шины выхода ПЗУ-идентификации команд 24 формируется единичный сигнал, который поступает по первому входу (сброса) в первый регистр 34 и устанавливает его в нулевое состояние. При этом на выходе ПЗУ-управления смещением 47 формируется нулевой код и рассматриваемый дрон переходит в режим движения «колонна». Таким образом, для каждого дрона ведомой группы командная синхропоследовательность задает свою команду руления и эта команда в виде сигнала рассогласования для сервопривода рулевого механизма 44 сохраняется в третьем регистре 45 в течение цикла командной синхропоследовательности, по завершении которого происходит обновление указанного сигнала рассогласования в следующем аналогичном цикле.
Выбор частоты первого генератора импульсов 1 следует из предположения максимальной групповой скорости движения. Например, положим эту скорость равной 40 км/час. Тогда безопасное расстояние между соседними дронами в процессе движения равно 20 м [2]. Время прохождения указанного расстояния акустическим сигналом составляет 20/330=0.06 сек. Тогда частота генерации импульсов генератором 1 должна быть не выше 1/0.06=17 герц. При количестве дронов в группе равном 5, цикл командной синхропоследовательности равен примерно 0.06*5=0.3 сек. Следовательно, частота обновления сигналов рассогласования сервоприводов дрона составляет 1/0.3=3 герца. При выполнении ранее сделанных допущений относительно максимальной длительности командного сигнала командной синхропоследовательности, частота второго 23 и третьего 31 генераторов импульсов может быть выбрана равной 17*30=510 герц.
Использованная литература:
1. ОДМ 218.5.001-2008 «Методические рекомендации по защите и очистке автомобильных дорог от снега». Федеральное дорожное агентство (Росавтодор). - М. 2008 (www.files.stroyinf.ru/Data1/52/52468/).
2. Иванов В.Н. Наука управления автомобилем. М. «Транспорт», 1990, с. 150.

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО ГРУППОВОГО ВОЖДЕНИЯ ДОРОЖНЫХ МАШИН И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2664033C1 |
| СПОСОБ ПОМОЩИ ВОДИТЕЛЯМ ПРИ ПЕРЕСТРОЕНИЯХ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2646782C2 |
| СПОСОБ И СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДРОНОМ | 2018 |
|
RU2714977C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДРОНОМ СОПРОВОЖДЕНИЯ ВОДОЛАЗА | 2017 |
|
RU2672505C1 |
| Устройство для телеуправления | 1989 |
|
SU1737482A1 |
| Устройство для проведения телеигр | 1982 |
|
SU1063425A1 |
| Коммутатор | 1981 |
|
SU995326A1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ НЕПРАВОМЕРНЫХ ДЕЙСТВИЙ ВОДИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2613918C2 |
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЯ ЖИДКОЙ СРЕДЫ В РЕЗЕРВУАРЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2096744C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ ВЕЛИЧИН И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 1996 |
|
RU2096743C1 |
Способ группового вождения дорожных дронов обеспечивает вождение цепью ведущей пилотируемой дорожно-уборочной машиной группы беспилотных дорожно-уборочных машин (дронов). Команды оператора ведущей машины по формированию колонны, цепи вправо, цепи влево и торможения группы преобразуют в циклическую командную синхропоследовательность, которой модулируют электромагнитное излучение с борта ведущей машины. Каждый дрон группы принимает электромагнитное излучение, посредством демодуляции воспроизводит командную синхропоследовательность, идентифицирует относящиеся к нему командные сигналы и кванты времени для приема акустического сигнала от ближайшего впереди дрона или ведущей машины и для излучения со своего борта акустического сигнала в сторону ближайшего сзади дрона. Текущие продольные и поперечные межмашинные расстояния определяют на основе учета разности скоростей распространения электромагнитных и акустических импульсов. Синхронизация машин по скорости движения обеспечивается на основе отслеживания дронами безопасного продольного расстояния для текущей скорости движения ведущей машины. Параллельное движение ведомых машин обеспечивается на основе отслеживания установочных поперечных межмашинных расстояний. Также раскрыта система реализующая указанный способ. Обеспечивается автоматизация дорожно-уборочных работ. 2 н.п. ф-лы, 5 ил., 2 табл.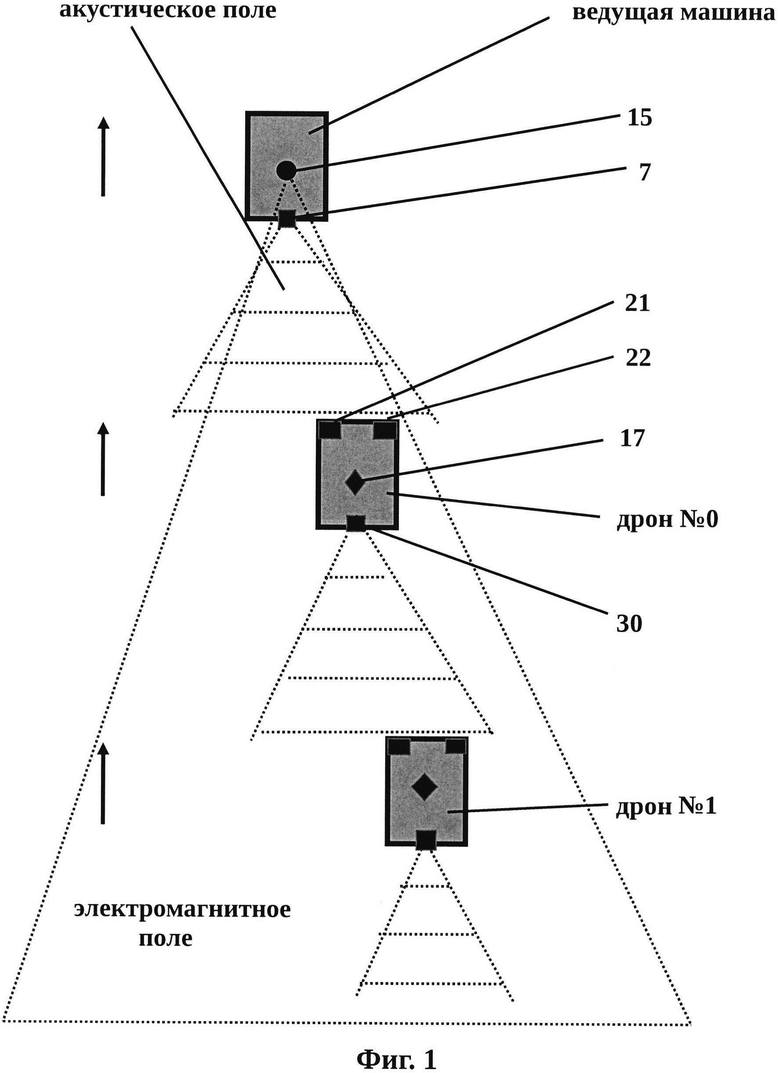
1. Способ группового вождения дорожных дронов, в котором периодически излучают электромагнитные, преимущественно радиочастотные, сигналы, излучают два рода акустических, преимущественно ультразвуковых, сигналов, первый из которых возбуждают одновременно с каждым электромагнитным сигналом, принимают электромагнитные и акустические сигналы, определяют расстояния от излучателя акустических сигналов до двух датчиков акустических сигналов по временным задержкам их приема относительно соответствующих электромагнитных сигналов и автоматически управляют курсом движения каждого дорожного дрона по предварительно формируемым сигналам рассогласования, отличающийся тем, что в нем выполняют следующие дополнительные действия:
- электромагнитные сигналы излучают с борта ведущей машины с ориентацией диаграммы направленности излучения в заднее полупространство машины, акустические сигналы первого рода излучают с позиции середины задней части ведущей машины с ориентацией диаграммы направленности излучения в заднее полупространство машины, тиражируют излучение акустических сигналов второго рода по количеству дронов в группе с размещением позиций их излучения в середине задней части каждого дрона с ориентацией их диаграмм направленности в заднее полупространство дронов, принимают электромагнитные сигналы на борту каждого дрона группы, принимают акустические сигналы на борту каждого дрона группы в позициях симметрично относительно середины и ближе к краям фронтальной его части;
- предварительно под ручным управлением расставляют группу дорожных машин колонной, с ведущей машиной во главе, присваивают им идентификационные порядковые номера от нуля, для дрона, ближайшего к ведущей машине, с возрастанием в сторону хвоста колонны и устанавливают необходимое для выполнения групповой работы боковое смещение каждого дрона относительно ближайшей спереди машины;
для ведущей машины:
- после установки всей группы машин в исходное состояние ручным или автоматическим образом перемещают ведущую машину по дороге в соответствии с планом дорожно-уборочных работ и формируют по ходу движения необходимые команды режимов вождения дронов и областей действия указанных режимов;
- преобразуют команды режимов вождения дронов и пролонгации указанных режимов в циклическую командную синхропоследовательность, в которой каждый цикл начинается с командного сигнала, несущего в себе значение текущей команды оператора по режиму вождения дронов, за которым следуют сигналы «пролонгация команды», за которыми следуют сигналы «отмена команды», причем указанные типы сигналов имеют признаки отличия друг от друга, а период следования сигналов не меньше времени прохождения акустического сигнала между соседними машинами в группе;
- модулируют электромагнитное излучение командной синхропоследовательностью и обеспечивают возбуждение своего излучения акустических сигналов в течение кванта времени командного сигнала командной синхропоследовательности;
для каждого дорожного дрона:
- идентифицируют значение сигналов в каждом цикле принимаемой командной синхропоследовательности и обеспечивают счет в пределах указанного цикла каждого сигнала, считая номер командного сигнала нулевым;
- обеспечивают прием акустических сигналов на время совпадения номера сигнала в очередном цикле принятой командной синхропоследовательности с идентификационным номером дрона;
- возбуждают свое излучение акустических сигналов второго рода на время совпадения номера сигнала в очередном цикле принятой командной синхропоследовательности с увеличенным на единицу идентификационным номером дрона;
- при приеме в очередном цикле принятой командной последовательности команды «торможение» блокируют (отключают) управление скоростью движения дрона и одновременно включают торможение дрона до прихода очередной команды, отличной от команды «торможение»;
- при приеме в очередном цикле командной синхропоследовательности команды «колонна», одновременном совпадении номера принимаемого сигнала в этом цикле с идентификационным номером дрона и типе «команда» или «пролонгация команды» указанного сигнала, до приема цикла с другой командой, курсом дрона управляют по критерию минимизации рассогласования между текущими расстояниями от позиции акустического излучения ближайшего спереди дрона или ведущей машины до позиций приема указанного излучения на рассматриваемом дроне;
- при приеме в очередном цикле командной синхропоследовательности команды «цепью вправо», одновременном совпадении номера принимаемого сигнала в этом цикле с идентификационным номером дрона и типе «команда» или «пролонгация команды» указанного сигнала, до приема цикла с другой командой, курсом дрона управляют по критерию минимизации рассогласования между текущими расстояниями от позиции акустического излучения ближайшего спереди дрона или ведущей машины до позиций приема указанного излучения на рассматриваемом дроне с добавлением установочного положительного смещения;
- при приеме в очередном цикле командной синхропоследовательности команды «цепью влево», одновременном совпадении номера принимаемого сигнала в этом цикле с идентификационным номером дрона и типе «команда» или «пролонгация команды» указанного сигнала, до приема цикла с другой командой, курсом дрона управляют по критерию минимизации рассогласования между текущими расстояниями от позиции акустического излучения ближайшего спереди дрона или ведущей машины до позиций приема указанного излучения на рассматриваемом дроне с вычитанием установочного положительного смещения;
- при приеме в очередном цикле принятой командной последовательности команды «колонна», «цепью влево» или «цепью вправо», до приема цикла с командой «торможение», управляют скоростью движения дрона по критерию минимизации рассогласования разности расстояния, равного безопасной дистанции до ближайшего впереди дрона, например расстояния в метрах, численно равного половине текущей скорости дрона, и половины суммы расстояний от позиции акустического излучения ближайшего спереди дрона или ведущей машины до позиций приема указанного излучения на рассматриваемом дроне;
причем мощность излучаемых электромагнитных сигналов задают достаточной для достижения всех дронов группы, мощность излучаемых акустических сигналов задают достаточной для достижения ближайшего сзади дрона, а длительность электромагнитных и акустических сигналов задают меньшей времени прохождения акустическим сигналом дистанции между двумя соседними дорожными машинами во всем диапазоне скоростей движения группы.
2. Система группового вождения дорожных дронов, реализующая способ по п. 1, содержащая излучатель электромагнитных, преимущественно радиочастотных, сигналов, первый и второй излучатели акустических сигналов, датчик электромагнитных сигналов, а также первый и второй датчики акустических сигналов, отличающаяся тем, что в нее дополнительно введены:
на борту ведущей машины в составе командно-задающего устройства: первый генератор импульсов, шифратор, датчик степени пролонгации команд, датчик команд режимов движения, кольцевой счетчик, первый компаратор, логический элемент ИЛИ-НЕ, первый, второй, третий, четвертый, пятый и шестой ждущие мультивибраторы, первый логический элемент ИЛИ,
причем выход первого генератора импульсов связан с первым входом первого излучателя акустических сигналов, первым входом первого ждущего мультивибратора, входом кольцевого счетчика и входом шестого ждущего мультивибратора, линии шины выхода датчика степени пролонгации команд соединены с одноименными линиями шины входа шифратора, линии шины выхода шифратора связаны с одноименными линиями шины первого входа первого компаратора, линии шины выхода кольцевого счетчика связаны с одноименными линиями шины входа логического элемента ИЛИ-НЕ и шины второго входа первого компаратора, выход первого компаратора соединен со вторым входом первого ждущего мультивибратора, выход логического элемента ИЛИ-НЕ связан с первыми входами второго, третьего, четвертого и пятого ждущих мультивибраторов и вторым входом первого излучателя акустических сигналов, первая, вторая, третья, четвертая линии шины выхода датчика команд режима движения связаны со вторыми входами соответственно второго, третьего, четвертого и пятого ждущих мультивибраторов, выход шестого ждущего мультивибратора соединен с первым входом первого логического элемента ИЛИ, выходы первого, второго, третьего, четвертого и пятого ждущих мультивибраторов соединены соответственно с первой, второй, третьей, четвертой и пятой линиями шины второго входа первого логического элемента ИЛИ, выход которого связан с входом излучателя электромагнитных сигналов,
на борту каждого дорожного дрона в составе устройства его управления введены:
первый, второй, третий и четвертый счетчики, датчик идентификационного номера, второй и третий генераторы импульсов, второй компаратор, первый и второй RS-триггеры, постоянное запоминающее устройство (ПЗУ) идентификации команд, седьмой и восьмой ждущие мультивибраторы, второй логический элемент ИЛИ, первый и второй сумматоры, первый, второй и третий регистры, цифровой спидометр, первый вычитатель, второй вычитатель, датчик установочного смещения, привод торможения, ПЗУ-управления смещением, сервопривод скорости движения, сервопривод рулевого механизма,
причем выход датчика электромагнитных сигналов связан с первыми входами первого и второго счетчика, а также ПЗУ-идентификации команд, выход второго генератора импульсов связан со вторым входом первого счетчика, линии шины выхода которого связаны с одноименными линиями шины второго входа ПЗУ-идентификации команд, первая линия шины выхода которого соединена с первым входом первого регистра, третья, четвертая и пятая линии формируют шину второго входа первого регистра и шину входа второго логического элемента ИЛИ, выход которого соединен со вторым входом второго счетчика и третьим входом первого регистра, линии шины выхода второго счетчика связаны с одноименными линиями шины первого входа второго компаратора, линии шины второго входа которого связаны с одноименными линиями шины выхода датчика идентификационного номера, первый выход второго компаратора соединен с входами первого и второго датчиков акустических сигналов, второй выход связан с первыми входами первого и второго RS-триггеров, третьего и четвертого счетчиков, входом третьего генератора импульсов, а также входами седьмого и восьмого ждущих мультивибраторов, выход седьмого ждущего мультивибратора соединен с входом второго излучателя акустических сигналов, выход первого датчика акустических сигналов соединен со вторым входом первого RS-триггера, выход которого связан со вторым входом третьего счетчика, выход второго датчика акустических сигналов соединен со вторым входом второго RS-триггера, выход которого связан со вторым входом четвертого счетчика, первая линия шины выхода первого регистра связана с первым входом сервопривода скорости движения и входом привода торможения, вторая и третья линии образуют шину первого входа ПЗУ-управления смещением, выход восьмого мультивибратора соединен с первыми входами второго и третьего регистра, выход третьего генератора импульсов связан с третьими входами третьего и четвертого счетчиков, линии шины выхода третьего счетчика связаны с одноименными линиями шины первого входа первого сумматора и шины первого входа второго вычитателя, линии шины выхода четвертого счетчика связаны с одноименными линиями шины второго входа первого сумматора и шины второго входа второго вычитателя, линии шины выхода первого сумматора связаны с одноименными линиями шины первого входа первого вычитателя, линии шины второго входа которого соединены с одноименными линиями шины выхода цифрового спидометра, а линии шины выхода связаны с одноименными линиями шины второго входа второго регистра, линии шины выхода второго регистра соединены с одноименными линиями шины второго входа сервопривода скорости движения, линии шины выхода второго вычитателя связаны с одноименными линиями шины первого входа второго сумматора, линии шины второго входа которого связаны с одноименными линиями шины выхода ПЗУ-управления смещением, линии шины второго входа которого связаны с одноименными линиями шины выхода датчика установочного смещения, линии шины выхода второго сумматора связаны с одноименными линиями шины второго входа третьего регистра, линии шины выхода которого соединены с одноименными линиями шины входа сервопривода рулевого механизма.
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Способ группового вождения сельскохозяйственных агрегатов | 1981 |
|
SU1103814A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| RU 2012122734 A, 20.12.2013. | |||

