Изобретение относится к области цифровой обработки сигналов и может быть применено при построении радиоприемных устройств, оснащенных антенной решеткой, где реализуются методы пространственно-временной обработки сигналов. Изобретение также относится к методам выполнения матричных и векторных вычислений, а именно к математическим операциям над комплексными цифровыми сигналами, которые требуются при реализации методов цифрового диаграммообразования, в том числе при адаптивной фильтрации принимаемых сигналов от помех. Изобретение может быть использовано при приеме спутниковых сигналов, таких как сигналы глобальных навигационных спутниковых систем (ГНСС).
Известен способ адаптивной компенсации помех в реальном времени [патент РФ № 2271066, МПК Н04В 1/10, опубл. 27.02.2006 г.], который обеспечивает подавление помех в реальном времени при переходном процессе нулевой длительности. Данный способ заключается в том, что каждый из сигналов от приемной антенной решетки пропускают через СВЧ-тракт, тракт преобразования частоты и полосовой фильтр; один из сигналов антенной решетки принимают основным, остальные используют как компенсационные; каждый из указанных сигналов пропускают через аналого-цифровой квадратурный преобразователь, на выходе которого формируют цифровой комплексный сигнал; цифровые выборки комплексных сигналов подают на вход цифрового процессора, причем выборки поступают с прореживанием в несколько раз, и одновременно с этим выборки сигналов при помощи программируемой логической интегральной схемы (ПЛИС) буферизируют в линиях задержки на количество тактов дискретизации, равное по длительности времени матричных вычислений в цифровом процессоре; в цифровом процессоре на основе поступивших выборок вычисляют выборочную корреляционную (ковариационную) матрицу, выполняют ее обращение и вычисляют оптимальные весовые коэффициенты; буферизированные в линиях задержки выборки цифровых комплексных сигналов умножают на комплексные весовые коэффициенты; результаты умножения суммируют, образуя компенсационный сигнал, который вычитают из выборки цифрового комплексного сигнала основного канала.
Недостатком известного способа является реализация пространственной обработки сигналов, что менее эффективно для обработки широкополосных сигналов, чем пространственно-временная обработка сигналов.
В указанной практической реализации предложенного способа используют аналого-цифровой преобразователь (АЦП) с частотой дискретизации 12 МГц. Комплексные отсчеты подаются в цифровой процессор с коэффициентом прореживания, равным 12. Следовательно, при увеличении частоты дискретизации для обработки сигналов в более широкой полосе частот коэффициент прореживания также потребуется увеличивать, что неизбежно приведет к потере сведений о сигнально-помеховой обстановке при расчете корреляционной матрицы.
При использовании известного способа в случае увеличения количества компенсационных каналов также потребуется выполнять прореживание выборок. При этом будет возрастать длительность вычисления корреляционной матрицы в цифровом процессоре, и будут увеличиваться требования к аппаратным ресурсам ПЛИС.
Известен способ обработки сигналов глобальных навигационных систем от нескольких антенн, описанный в патенте под названием «Эффективный фильтр пространственно-временной обработки сигналов для приемников глобальных навигационных систем» [патент США №7471744, МПК Н04 В 7/185, опубл. 24.01.2008 г.].
Данный способ обработки сигналов глобальных навигационных систем от нескольких антенн включает в себя радиочастотный прием и обработку сигналов, оцифровку сигналов, выполнение быстрого преобразования Фурье, вычисление ковариационной матрицы в частотной области, фильтрацию сигналов в частотной области, обратное преобразование Фурье над сигналом после фильтрации, передачу отфильтрованного сигнала для дальнейшей корреляционной обработки навигационных сигналов.
В данном способе для выполнения пространственно-временной обработки сигналов предлагается вычислять матрицу ковариации в верхнетреугольном варианте в течение заданного интервала времени без расчета повторяющихся произведений, и недостающие элементы матрицы заполнять копированием вычисленных элементов по диагонали по направлению от верхнего левого угла к нижнему правому. Данный подход позволяет сэкономить на аппаратных ресурсах при умножении сигналов, однако, является главным недостатком предложенного способа, поскольку намеренно вносит ошибки в последующие вычисления за счет замены истинно вычисленных элементов матрицы их соседним (аппроксимированным) значением, что отрицательно сказывается на точности расчетов. Утверждается, что соседние значения в матрице слабо отличаются между собой, т.к. задержка в вычислениях равна одному такту.
Тем не менее, при увеличении разрядности сигналов, при увеличении размеров вычисляемой матрицы накопленная ошибка может внести погрешность в дальнейших вычислениях и при получении конечных весовых коэффициентов, используемых при пространственно-временной обработке сигналов, что выразится в недостаточно эффективной фильтрации помех. В описании представленного способа указывается, что вычисление матрицы ковариации должно выполняться за некоторый интервал времени, но не менее 0,5 мс, поскольку при меньших значениях ковариационная матрица становится вырожденной. К недостаткам предлагаемого способа также следует отнести применение прямого и обратного преобразований Фурье, которые требуют дополнительных вычислительных ресурсов.
Известен способ устранения пространственных помех, наиболее близкий по технической сущности и принятый за прототип [патент РФ №2575973, МПК G01S 17/16, опубл. 27.02.2016 г.].
Данный способ устранения пространственных помех заключается в том, что сигналы, поступающие с выходов N-элементной антенной системы, пропускают через ВЧ-тракт, оцифровывают в N аналого-цифровых преобразователях, обрабатывают в цифровом вычислителе, где вычисляют ковариационную матрицу, раскладывают ее для последующей фильтрации, далее сигнал, свободный от некоррелированных помех, передают на входы устройств, предназначенных для извлечения полезной информации.
В прототипе ковариационную матрицу раскладывают на собственные векторы и собственные значения с целью определения множества мощных коррелированных сигналов для их дальнейшего исключения. Фильтрация от помех выполняется умножением вектора-строки входных комплексных выборок на матрицу, вычисленную на основе собственных векторов, относящихся к шумам и полезным сигналам. Собственные вектора, относящиеся к пространствам помех, не используются.
Недостатком прототипа является низкая эффективность пространственно-временной обработки радиосигналов из-за необходимости использовать значительный объем аппаратных вычислительных ресурсов для реализации пространственно-временной обработки радиосигналов, вследствие чего затруднено масштабирование при наращивании количества каналов обработки или увеличении числа отводов в цифровых фильтрах.
Внутренняя структура узлов пространственной обработки радиосигналов представлена в работе [Arribas, J. GNSS Array-based Acquisition: Theory and Implementation. Ph.D. Dissertation / J. Arribas. - Universitat Politecnica de Catalunya, 2012. - 298 p.], где приводятся подробные сведения о матричном и векторном умножителях, используемых для пространственной фильтрации. Аналогичные узлы без раскрытия внутренней структуры также представлены в описании прототипа для фильтрации узкополосных помех.
Известно, что для обработки широкополосных сигналов количество аппаратно реализуемых умножителей комплексных сигналов кратно зависит от числа каналов, сигналы которых используются в матричных вычислениях, а также от количества отводов в линиях задержки. Принимая во внимание общеизвестные сведения [Arribas, J. GNSS Array-based Acquisition: Theory and Implementation. Ph.D. Dissertation / J. Arribas. - Universitat Politecnica de Catalunya, 2012. - 298 p.; Woods, R. FPGA-based Implementation of Signal Processing Systems / R. Woods, J. McAllister и др. - John Wiley & Sons, 2008. - 364 p.] о реализации цифровых матричных операций над комплексными сигналами в ПЛИС, можно прийти к выводу, что при масштабировании рассмотренного в прототипе решения потребуется вычисление сотен элементов матрицы ковариации, для каждого из которых используются операции аппаратного умножения сигналов. Рост требований к вычислительным ресурсам приведет к увеличению стоимости применяемой ПЛИС, либо к необходимости использовать нескольких менее производительных ПЛИС, что увеличивает энергопотребление и массогабаритные характеристики. В случае портативных или мобильных решений это может иметь критическую значимость.
Техническим результатом, на достижение которого направлено заявляемое изобретение является повышение эффективности пространственно-временной обработки радиосигналов путем возможности сокращения вычислительных ресурсов при увеличении размеров вычисляемой матрицы ковариации с сохранением точности расчетов.
Технический результат достигается тем, что способ пространственно-временной обработки радиосигналов для компенсации помех, заключающийся в том, что сигналы, поступающие с выходов N-элементной антенной системы, обрабатывают в радиоприемном устройстве, оцифровывают в N аналого-цифровых преобразователях, обрабатывают в цифровом вычислителе, где вычисляют ковариационную матрицу, раскладывают ее для последующей фильтрации, далее сигнал, свободный от некоррелированных помех, передают на входы устройств, предназначенных для извлечения полезной информации, согласно изобретению, в процессе вычисления ковариационной матрицы применяют линии задержки для сохранения произведений комплексных цифровых сигналов на последних тактах вычислений матрицы ковариации, на основе вычисленных произведений восстанавливают отсутствующие элементы матрицы ковариации, при этом на основе ковариационной матрицы рассчитывают обратную матрицу, результаты вычислений которой используют в пространственно-временной обработке сигналов.
Применение линии задержки в процессе вычислений ковариационной матрицы для сохранения произведений комплексных цифровых сигналов на последних тактах вычислений матрицы ковариации, восстановление на основе вычисленных произведений отсутствующих элементов матрицы ковариации, при этом расчет обратной матрицы на основе ковариационной матрицы, результаты вычислений которой используют в пространственно-временной обработке сигналов, дают возможность сократить аппаратные вычислительные ресурсы при увеличении размеров вычисляемой матрицы с сохранением точности расчетов, повысив эффективность обработки радиосигналов.
Наличие в заявляемом изобретении признаков, отличающих его от прототипа, позволяет считать его соответствующим условию «новизна».
Новые признаки, которые содержит отличительная часть формулы изобретения, не выявлены в технических решениях аналогичного назначения. На этом основании можно сделать вывод о соответствии заявляемого изобретения условию «изобретательский уровень».
Изобретение иллюстрируется фигурами.
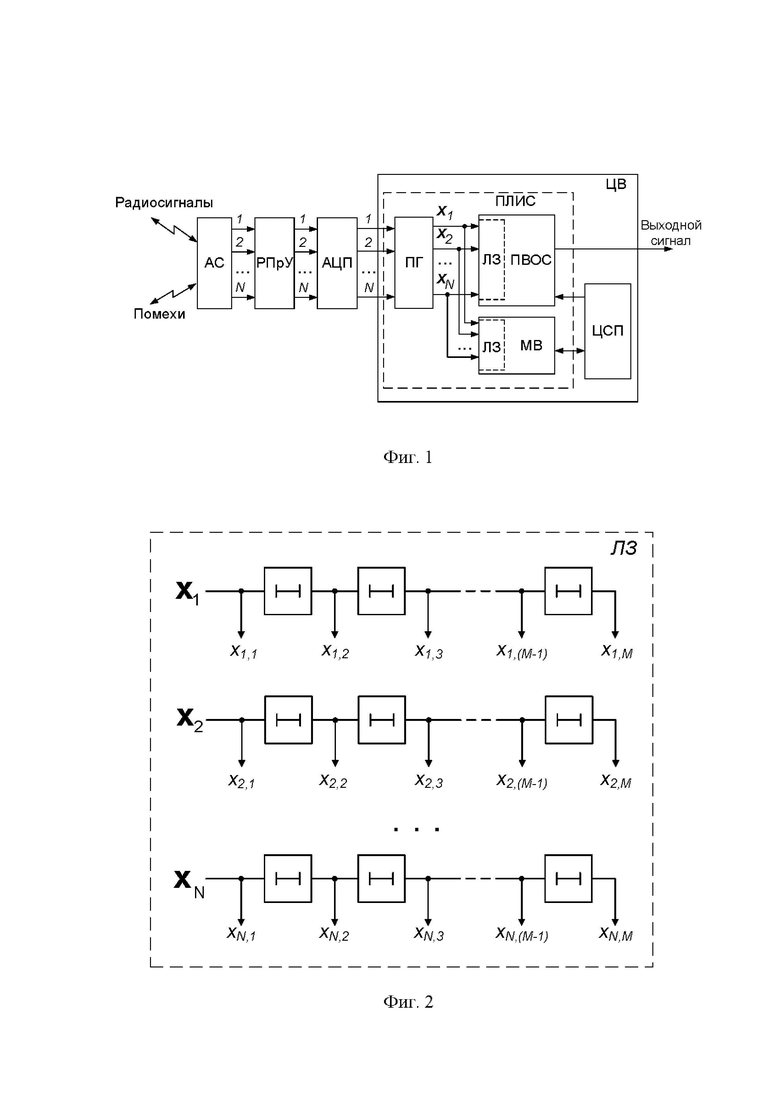
На фиг. 1 представлено схематично многоканальное радиоприемное устройство, реализующее заявляемый способ, где:
АС - антенная система из N антенных элементов; 1, 2... N - сигналы с выходов N антенных элементов; РПрУ - радиоприемное устройство; АЦП - блок аналого-цифровых преобразователей; ЦВ - цифровой вычислитель;
ПЛИС - программируемая логическая интегральная схема, ЦСП - цифровой сигнальный процессор; ПГ - преобразователь Гильберта;
Xi… - комплексные цифровые сигналы, полученные с выходов
ПГ;
ЛЗ - линии задержки;
ПВОС - блок пространственно-временной обработки сигналов; MB - матричный вычислитель.
Стрелками показана передача радиосигналов от N антенных элементов АС к РПрУ и затем в АЦП. Стрелки, выходящие из АЦП, показывают оцифрованные сигналы, поступающие в ЦВ. Выходящие из ПГ стрелки показывают комплексные цифровые сигналы. Двунаправленная стрелка между MB и ЦСП показывает передачу от ЦСП к MB конфигурационных данных, в обратную сторону от MB к ЦСП происходит чтение вычисленной матрицы ковариации. Стрелка от ЦСП к ПВОС показывает загрузку весовых коэффициентов для обработки сигналов. С выхода ПВОС стрелкой показан выходной сигнал без помех.
На фиг. 2 схематично представлено N линий задержки (ЛЗ), входящие, как это показано на фиг. 1, в состав MB и ПВОС. На фиг. 2 обозначено:
х1… xN - векторы комплексных цифровых сигналов, поступающих с выходов ПГ, т.е. x=[x(Δt), x(2Δt),x(3Δt),… x(kΔt),…] - выборки комплексных сигналов, поступающие в ЛЗ с интервалом дискретизации Δt, k - номер интервала дискретизации;
М - количество отводов в ЛЗ для каждого из сигналов х;
x1,1, x1,2,… х2,1 х2,2,… xN,1 xN,2,… xN,M - векторы выборок сигналов x1… xN, получаемые с 1… М отводов ЛЗ.
Стрелками вниз показаны выходные сигналы ЛЗ, содержащие выборки сигналов х1… xN; сдвинутые на между собой на количество тактовых интервалов, которое зависит от номера отвода ЛЗ. Выходные сигналы ЛЗ далее непосредственно используются в работе блока ПВОС или при вычислении матрицы ковариации в MB.
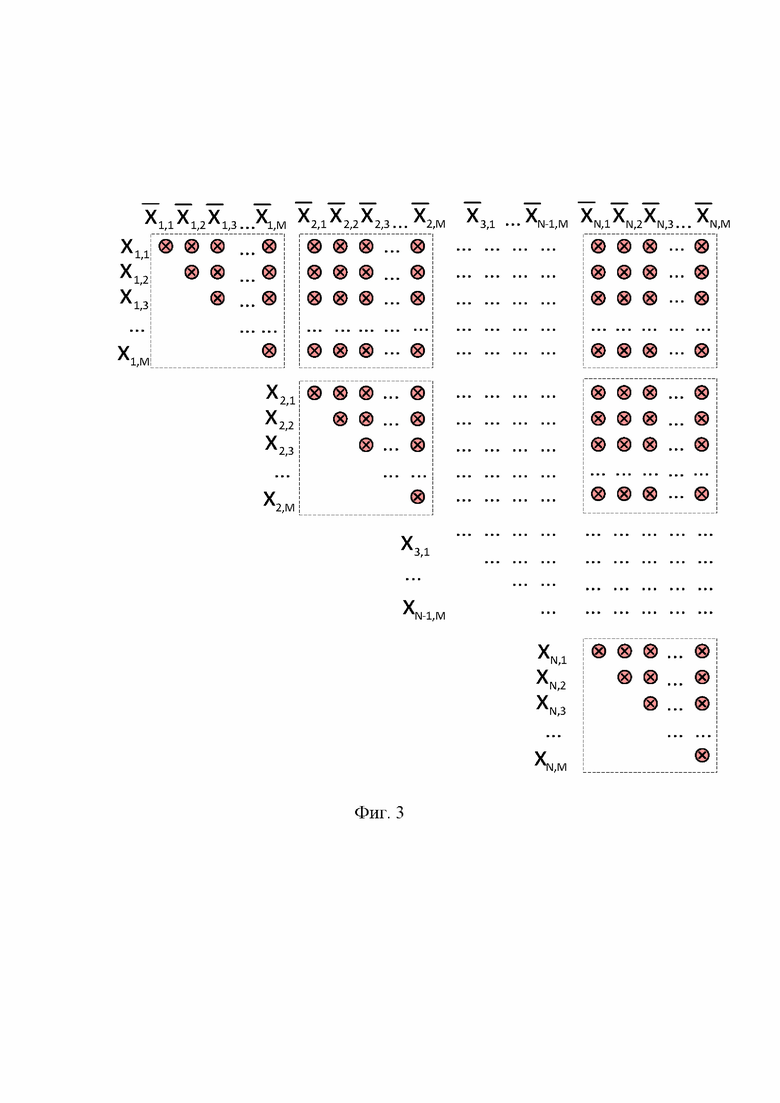
На фиг. 3 схематично показано вычисление ковариационной матрицы при пространственно-временной обработке сигналов, где выполняется перемножение цифровых комплексных сигналов, полученных с выходов линий задержки, во всех требуемых комбинациях. Символ (×) показывает операцию умножения выборок комплексных сигналов с последующим накоплением результатов умножений. Пунктиром выделены фрагменты, соответствующие перемножению выборок двух разных сигналов х1… xN после прохождения через линии задержки во всех возможных для них комбинациях. Выделенные фрагменты по главной диагонали матрицы соответствуют перемножению выборок одного и того же сигнала с их комплексно-сопряженными копиями. Сигналы на фиг. 3 имеют обозначения:
х1,1…х1,М,х2,1…x2,M,xN,1,…xN,M - векторы выборок комплексных цифровых сигналов х1/ хN, получаемые после линий задержки;
 векторы выборок комплексно сопряженных цифровых сигналов х1… xN.
векторы выборок комплексно сопряженных цифровых сигналов х1… xN.
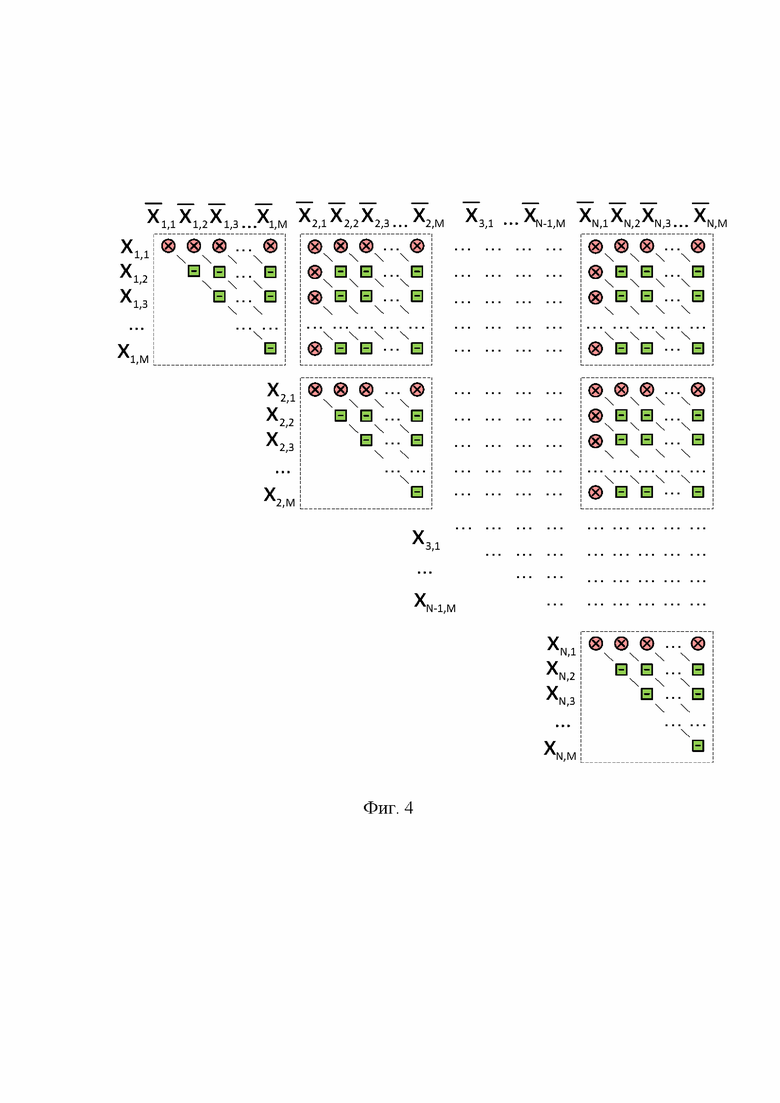
На фиг. 4 изображена структурная схема вычисляемой матрицы ковариации согласно заявляемому способу. За основу взята матрица, показанная на фиг. 3. Символами (×) показаны элементы матрицы, в которых требуется вычислять произведения комплексных сигналов с накоплением произведений. Элементы матрицы [-] являются регистрами линии задержки, в которых происходит буферизация произведений комплексных сигналов на последних тактах вычисления матрицы ковариации. Регистры линии задержки связаны с элементами матрицы (×) по диагонали слева направо и сверху вниз, как это показано во фрагментах матрицы пунктиром. Наклонными линиями [\] показаны связи между элементом, где выполняется аппаратное умножение, с элементами, где используются регистры линии задержки.
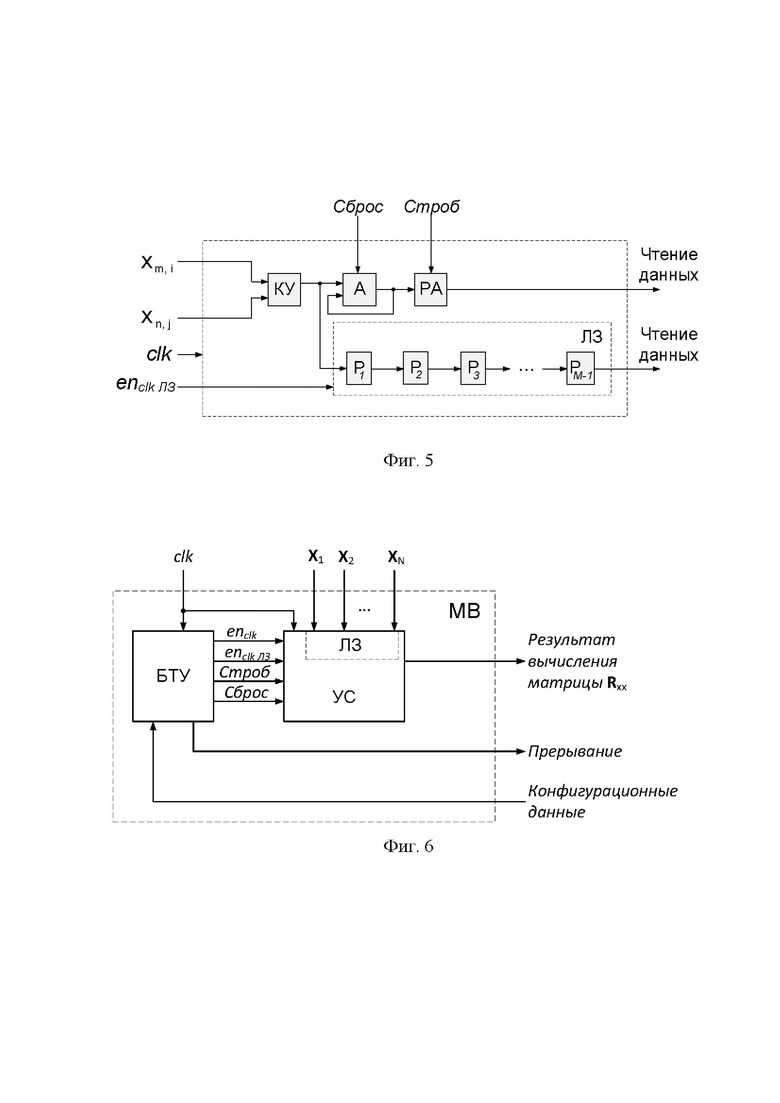
На фиг. 5 представлена структурная схема, показывающая аппаратную реализацию порядка умножения векторов выборок комплексных сигналов хт,i и xn,j где i, j - номера отводов ЛЗ (см. фиг. 2) и сохранения результатов вычислений согласно заявленному способу, где:
КУ - комплексный умножитель;
А - аккумулятор;
РА - регистр для выгрузки данных из аккумулятора;
ЛЗ-линия задержки;
P1, Р2, Р3 … РM-1 - регистры в ЛЗ для сохранения результатов произведений сигналов на последних тактах цикла расчета матрицы ковариации;
clk - тактовый сигнал;
enclk ЛЗ - сигнал разрешения тактирования ЛЗ на последних тактах цикла расчета матрицы ковариации Rxx;
«Строб» - стробирующий сигнал, по которому выполняется копирование содержимого А в РА по окончании цикла расчета матрицы ковариации Rxx;
«Сброс» - сигнал обнуления содержимого А по окончании цикла расчета матрицы ковариации Rxx непосредственно после сигнала «Строб».
На фиг. 6 представлена структурная схема матричного вычислителя (MB), согласно заявляемому способу, где:
clk - тактовый сигнал;
х1, х2… xN - векторы выборок комплексных цифровых сигналов, полученные с выходов ПГ (см. фиг. 1);
БТУ - блок тактирования и управления;
enclk - сигнал разрешение тактирования;
enclk ЛЗ - сигнал разрешение тактирования линий задержки;
ЛЗ-линии задержки;
УС - умножитель сигналов;
«Строб» и «Сброс» - сигналы, которые подаются в конце каждого цикла вычисления матрицы ковариации;
«Результат вычисления матрицы Rxx» - данные, содержащие результаты вычислений матрицы Rxx согласно заявляемому способу (см. фиг. 4);
«Конфигурационные данные» - данные, посредством которых ЦСП устанавливает режим работы MB;
«Прерывание» - сигнал об окончании цикла вычисления матрицы ковариации Rxx, передаваемый от MB к ЦСП.
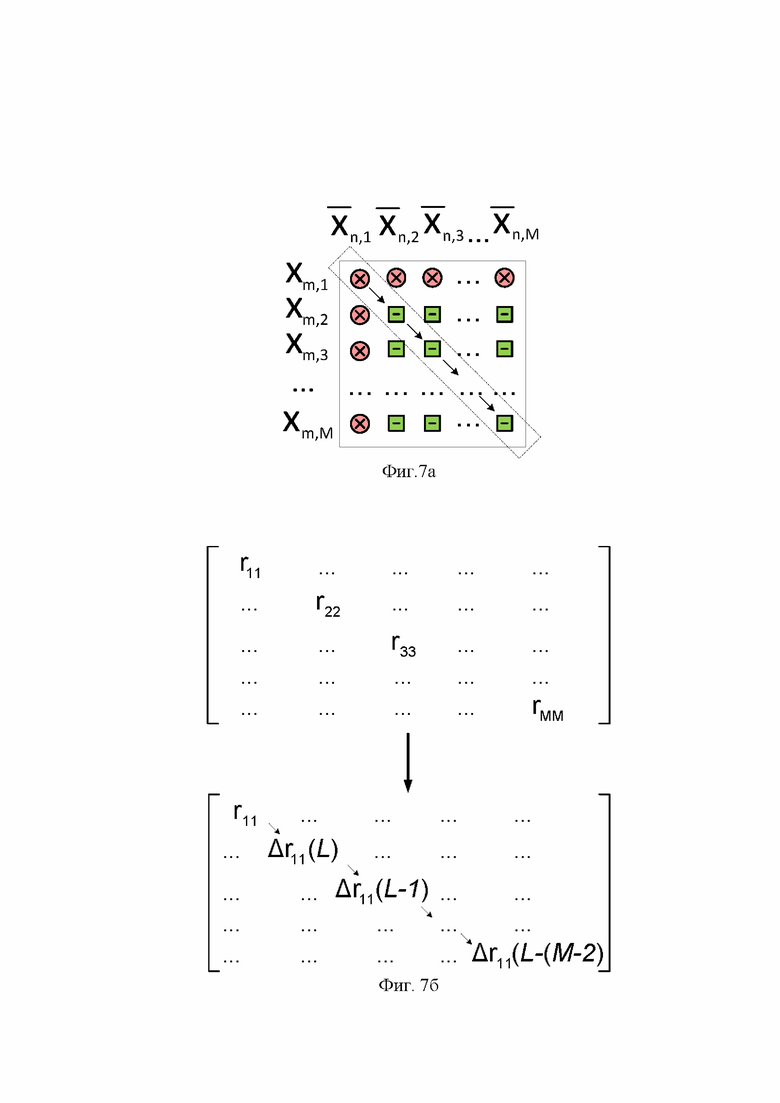
На фиг. 7а представлен внедиагональный фрагмент матрицы ковариации, показанной на фиг. 4, в котором для примера рассмотрено вычисление и заполнение элементов по главной диагонали, где:
m, n- номера сигналов в интервале 1… N
xm,1…xm,M, xn,1…xn,M - векторы выборок комплексных цифровых сигналов, полученные после линий задержки с отводов 1... М;
 векторы выборок комплексно сопряженных сигналов xm,1,…хm,M,х n,1…хn,M.
векторы выборок комплексно сопряженных сигналов xm,1,…хm,M,х n,1…хn,M.
Пунктиром на рисунке выделена вычислительная секция, схематично изображенная на фиг. 5.
На фиг. 7б показан пример заполнения главной диагонали внедиагонального фрагмента матрицы ковариации (фиг. 7а) значениями согласно заявляемому способу. Вычисление матрицы ковариации происходит на интервале времени [1… L] Δt, где:
Δt - интервал дискретизации сигналов xm и xn;
L - количество выборок, используемое для расчета матрицы ковариации;
r11, r22, r33 rММ - элементы матрицы ковариации, которые заполняются результатом суммирования всех произведений комплексных векторов сигналов  на всем интервале накопления;
на всем интервале накопления;
Δr11(L), Δr11(L-1)…Δr11(L-(M-2)) - значения, которыми заполняются элементы рассматриваемого фрагмента матрицы вместо вычисления элементов r22, r33…rмм.
Способ пространственно-временной обработки радиосигналов для компенсации помех реализуется следующим образом.
Заявляемый способ реализован многоканальным радиоприемным устройством (фиг. 1), оснащенным антенной системой (АС) из N антенных элементов, радиоприемным устройством (РПрУ), блоком аналого-цифровых преобразователей (АЦП), цифровым вычислителем (ЦВ). ЦВ содержит цифровой сигнальный процессор (ЦСП) и программируемую логическую интегральную схему (ПЛИС). В свою очередь ПЛИС содержит цифровые блоки: многоканальный преобразователь Гильберта (ПГ), блок пространственно-временной обработки сигналов (ПВОС) и матричный вычислитель (MB). Блоки ПВОС и MB имеют в своем составе многоотводные линии задержки (ЛЗ) (фиг. 2), посредством которых для каждого из входных комплексных сигналов Xi... х^ формируется совокупность сигналов, сдвинутых на один тактовый интервал.
Радиосигналы, в том числе помехи, принимаются антенной системой (АС), имеющей N антенных элементов. Сигналы, поступающие с выходов N-элементной антенной системы, обрабатываются в радиоприемном устройстве (РПрУ), где выполняется их фильтрация, усиление и перенос в диапазон промежуточной частоты. Затем принятые сигналы, преобразованные в диапазон промежуточной частоты, подаются в блок аналого-цифровых преобразователей (АЦП), где они оцифровываются.
После этого N цифровых сигналов с выхода многоразрядных АЦП обрабатываются в цифровом вычислителе (ЦВ). ЦВ принимает выборки оцифрованных N сигналов, после чего они в ПГ преобразуются в комплексную форму. Комплексные цифровые сигналы Xi... х^ подаются в блоки ПВОС и MB, где реализуется заявляемый способ вычисления матрицы ковариации. В процессе вычисления ковариационной матрицы применяют линии задержки (ЛЗ) для сохранения произведений комплексных сигналов на последних тактах вычислений матрицы. На основе вычисленных произведений восстанавливают отсутствующие элементы матрицы. На основе ковариационной матрицы рассчитывают обратную матрицу, результаты вычислений которой используют в пространственно-временной обработке сигналов.
Линии задержки (фиг. 2) используют при формировании совокупности выборок сигналов, сдвинутых относительно друг друга на интервал дискретизации, перед непосредственным выполнением матричных вычислений и при пространственно-временной обработке сигналов. В блоке ПВОС входные линии задержки являются частью многоотводных фильтров с переменными весовыми коэффициентами.
При помощи ЛЗ, имеющих М отводов формируется совокупность выборок входных сигналов, которую можно представить в виде вектора-стролбца X:

где х1,1, х1,2,… х1М; х2,1…х2бМ; хN,1...xN,M - вектор-строки выборок комплексных цифровых сигналов x1… xN, получаемые после ЛЗ;
Выборки полученной совокупности сигналов используются при расчете выборочной ковариационной матрицы Rхх сигналов [Монзинго, Р. А. Адаптивные антенные решетки: Введение в теорию: Пер. с англ. / Р. А. Монзинго, Т. У. Миллер. - М.: Радио и связь, 1986. - 448 с.]:
где  - вектор-столбец
- вектор-столбец
выборок сигналов, где каждый элемент представляет собой вектор-строку:
ХH - эрмитово сопряженный вектор X;
xn,m=[xn,m(Δt),xn,m(2Δt),… xn,m(kΔt),… xn,m(LΔt)], в которой содержатся выборки сигнала от антенны n, взятые с отвода m ЛЗ на интервале времени k=1…L,
где L - количество выборок, используемых для расчета матрицы ковариации.
В результате расчета матрица ковариации имеет размер NM×NM и может быть представлена в виде:
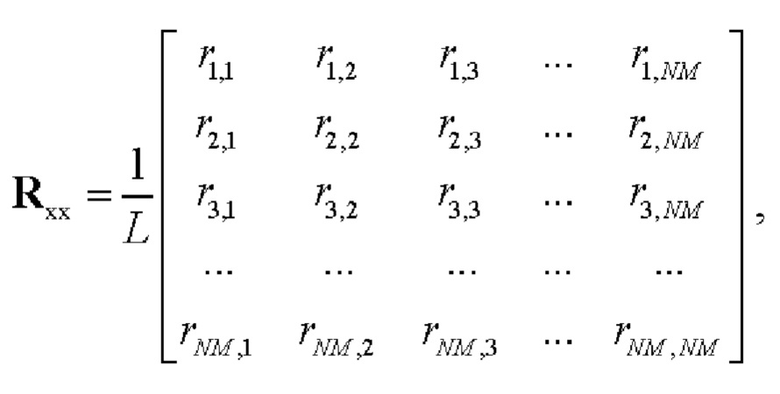
где rm,n - элемент матрицы, получаемый в процессе умножений векторов XXН.
На фиг. 3 схематично показан вариант аппаратного вычисления матрицы ковариации, известный из области техники, при котором реализуется свойство эрмитовой сопряженности матрицы Rxx, что выражается в необходимости расчета только верхнетреугольной матрицы. Полная матрица ковариации получаются симметричным отображением вычисленных элементов из верхнетреугольной части симметрично относительно главной диагонали. Отображаемые элементы становятся комплексно сопряженными к исходным элементам. Как показано на фиг. 3, задача нахождения ковариационной матрицы при таком подходе решается напрямую, т.е. сигналы xN,M, показанные в (1), аппаратно должны умножаться во всех парных комбинациях.
Однако при увеличении количества умножаемых сигналов N или при увеличении в ПВОС количества отводов М в ЛЗ размер вычисляемой матрицы ковариации также возрастает. Чем больше отводов у используемых ЛЗ, тем больше повторяется операция умножения с одними и теми же данными. Следовательно, увеличивается количество умножителей, требуемых для вычислений. Наиболее часто подобного рода вычисления реализуются в ПЛИС, которая позволяет выполнять большое количество аппаратных умножений параллельным способом.
Количество аппаратных умножителей в ПЛИС ограничено, поэтому для расчета матриц большого размера приходится применять дорогостоящие ПЛИС с большим количеством аппаратных умножителей, что не всегда доступно, либо задействовать в менее ресурсоемких ПЛИС логические блоки общего назначения, либо реализовывать MB на нескольких ПЛИС. Умножители, построенные на логических блоках общего назначения, могут занимать значительную часть аппаратных ресурсов. Кроме этого, увеличение количества ПЛИС ведет к увеличению габаритов, энергопотребления и стоимости разрабатываемого устройства обработки радиосигналов. Помимо того в ПЛИС для расчета каждого элемента в матрице (фиг. 3) требуются логические блоки общего назначения для реализации арифметических операций с вещественными и мнимыми компонентами комплексных сигналов, а также необходимо реализовать аккумуляторы для суммирования произведений.
Поэтому расчет матрицы ковариации сигналов большого объема реализуется заявляемым менее ресурсоемким способом, при котором значительное количество аппаратных умножений заменяется на регистры в составе линий задержки. Заявляемый способ вычисления матрицы ковариации возможно осуществить благодаря особенности умножения сигналов, характерной при ПВОС. Заявляемый способ расчета матрицы ковариации, при котором удалены аппаратные умножения для повторяющихся произведений сигналов и выполнена замена в соответствующих элементах на регистры в составе линий задержки, показан на фиг. 4. В течение всего цикла накопления выборочной матрицы ковариации необходимо вычислять элементы, обозначенные символом (×). Элементы [-] заполняются произведениями комплексных сигналов на последних тактах расчета матрицы ковариации.
В общем виде (фиг. 5) при аппаратной реализации заявляемого способа вычисления матрицы ковариации сокращение вычислительных ресурсов достигается последовательным соединением цифровых устройств, выполняющих расчет и суммирование произведений комплексных сигналов, а также регистров, в которых сохраняются произведения на последних тактах в цикле расчета матрицы Rxx.
Комплексному умножителю (КУ) и аккумулятору (А) на фиг. 5 соответствует элемент матрицы, обозначенный на фиг. 4 символом (×). Регистры Pl, Р2…PM-1 в ЛЗ на фиг. 4 соответствуют символам [-], расположенных по диагонали вправо и вниз от элемента (×).
В начале цикла расчета матрицы ковариации содержимое аккумулятора (А) равно нулю. На интервале времени k=1… L на вход комплексного умножителя поступают выборки сигналов xm,i(kΔt) и xn,j(k Δt), и на его выходе рассчитывается произведение  После этого полученное произведение суммируется с содержимым аккумулятора. В течение почти всего интервала расчета матрицы тактирование регистров в составе ЛЗ выключено. После (М - 1) тактов до окончания цикла расчета включается тактирование ЛЗ путем подачи сигнала разрешения тактирования enС1k ЛЗ.
После этого полученное произведение суммируется с содержимым аккумулятора. В течение почти всего интервала расчета матрицы тактирование регистров в составе ЛЗ выключено. После (М - 1) тактов до окончания цикла расчета включается тактирование ЛЗ путем подачи сигнала разрешения тактирования enС1k ЛЗ.
Первым в ЛЗ помещается результат

На последнем такте в ЛЗ помещается произведение
По окончании цикла расчета матрицы формируется входной сигнал «Строб», посредством которого данные аккумулятора копируются в регистр аккумулятора (РА). Одновременно с этим прекращается тактирование ЛЗ. Следующим тактом поступает сигнал «Сброс», по которому обнуляется содержимое аккумулятора. Затем, начинается новый цикл расчета матрицы ковариации. За время следующего цикла данные из РА и ЛЗ прочитываются в ЦСП, где на их основе выполняются завершающие операции по вычислению матрицы. Полноценно вычисленный элемент матрицы выгружается из РА, при этом данные из ЛЗ используются для получения недостающих элементов, находящихся на одной диагонали с вычисленным элементом.
Структурная схема MB согласно заявляемому способу показана на фиг. 6. Режим работы MB устанавливается посредством блока тактирования и управления (БТУ), в который загружаются конфигурационные данные. Вычисление матрицы ковариации может быть задано однократным или циклическим. БТУ задает количество выборок, используемых при вычислении матрицы ковариации. Диапазон времени вычисления может быть установлен в диапазоне от единиц микросекунд до десятков миллисекунд. Посредством сигнала прерывания БТУ сообщает в ЦСП о завершении цикла расчета матрицы ковариации.
В свою очередь ЦСП управляет режимом работы MB и в конце каждого цикла расчета матрицы ковариации прочитывает из MB результаты вычислений. Алгоритм работы ЦСП реализует вычисление весовых коэффициентов для цифровых фильтров. Вычисленные коэффициенты загружаются в блок ПВОС, где реализуется цифровое управление диаграммой направленности и адаптивная фильтрация в соответствии с сигнально-помеховой обстановкой.
После обработки входных выборок сигналов x1… xN блок ПВОС формирует выходной цифровой сигнал, свободный от некоррелированных помех, который передают на входы устройств, предназначенных для извлечения полезной информации.
В результате устранение повторяющихся произведений, умножение выборок в том элементе матрицы, где это произведение возникает впервые реализуется заявляемым способом. Для элементов матрицы, где произведение повторяется, используют ЛЗ с количеством регистров, которое соответствует числу повторений.
Пример конкретного выполнения
Процесс заполнения матрицы в соответствии с заявляемым способом, а также последующие вычисления с полученными значениями, проиллюстрирован на фиг. 7. Показана работа с элементами, расположенными на главной диагонали внутри фрагмента матрицы ковариации. Работа с элементами на других диагоналях выполняется аналогично. Данный фрагмент формируется сигналами xm,i и xn,j, полученными с выхода линии задержки в MB, где m, n - номера сигналов в интервале 1… N; i, j - номера отводов ЛЗ в диапазоне 1… М.
При непосредственном перемножении векторов с выборками сигналов после ЛЗ на главной диагонали будут вычислены элементы:
На фиг. 7а показано, что непосредственным умножением и накоплением произведений (символ (×)) рассчитывается только элемент матрицы r1,1. При этом расчет элементов r22…rмм не выполняется. Вместо умножения с накоплением используются регистры в составе ЛЗ (символ [-]), в которые сохраняются произведения сигналов на последних тактах цикла расчета матрицы ковариации. Пунктиром на фиг. 7а показана вычислительная секция, структурная схема которой приведена на фиг. 5. Для других диагоналей применяются такие же вычислительные секции, но с меньшим количеством регистров в линии задержки.
На фиг. 7б показан пример расположения исходных значений на главной диагонали во фрагменте матрицы и замена этих значений на произведения, которые вычисляются комплексным аппаратным умножителем, используемом для расчета элемента r1,1.
На месте элемента r22 сохраняется произведение выборок на последнем такте цикла расчета 
На месте элемента r33 сохраняется произведение выборок

Вместо элемента rМ,М сохраняется произведение выборок

Буферизация результатов произведений сигналов в регистрах ЛЗ происходит в конце цикла расчета матрицы Rxx благодаря наличию связи от комплексного умножителя (КУ) к линии задержки (ЛЗ), как это показано на фиг. 5.
Сформированные данные с результатами расчета матрицы ковариации, в которых содержатся как полностью рассчитанные элементы матрицы, так и сохраненные произведения выборок, передаются в ЦСП, в котором выполняется завершающий этап вычислений всех элементов матрицы Rxx.
Для рассматриваемого примера с элементами на главной диагонали во фрагменте матрицы требуется выполнить следующие действия. Элемент матрицы r1,1 уже вычислен в цикле расчета матрицы ковариации непосредственным перемножением и суммированием всех произведений выборок сигналов.
Элемент матрицы r2,2 вычисляется из элемента r1,1 вычитанием сохраненного в линии задержки значения Δr11(L).

Элемент матрицы r33 вычисляется вычитанием из полученного элемента r2,2 следующего сохраненного в линии задержки значения Δr1,1(L-l).

Элемент матрицы r44 вычисляется на основе рассчитанного элемента r33 вычитанием сохраненного в линии задержки следующего значения Δr11(L-2).

И так далее.
Последний элемент rM,M главной диагонали матрицы в рассматриваемом примере получается вычитанием из предыдущего элемента r(M-1),(M-1) значения Δr1,1(L-(M-2)), которое было записано в линию задержки первым.
 .
.
Аналогичным образом вычисляются все недостающие элементы во всей матрице ковариации. После этого выполняется дополнение верхнетреугольной матрицы ковариации путем копирования элементов симметрично главной диагонали с одновременным комплексным сопряжением. Полученная матрица Rxx подвергается разложению, например посредством QR-разложения, и обращению. Полученная обратная матрица  используется в расчете весовых коэффициентов для блока ПВОС.
используется в расчете весовых коэффициентов для блока ПВОС.
Таким образом, в результате замены аппаратных умножителей на ЛЗ реализуется более экономичное использование вычислительных ресурсов, которое становится все более ощутиммым при увеличении количества отводов в ЛЗ, сокращаются аппаратные вычислительные ресурсы при увеличении размеров вычисляемой матрицы с сохранением точности расчетов, повысив эффективность пространственно-временной обработки радиосигналов.
В таблице показан пример сравнительного анализа того, как влияет использование заявляемого подхода вычисления матрицы ковариации при его аппаратной реализации. При реализации ПВОС для количества сигналов N=4 рассмотрено использование ЛЗ с количеством отводов 2…6.
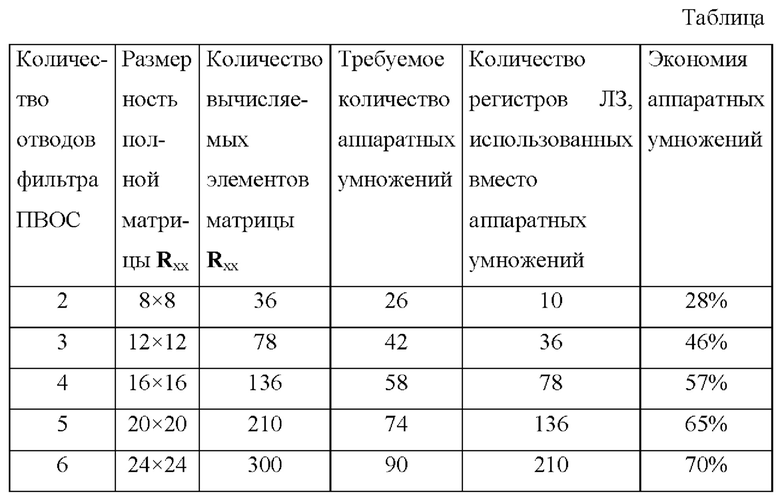
Данные представленной таблицы демонстрируют зависимость сэкономленных аппаратных умножений от количества отводов в ЛЗ при ПВОС, а именно, показывают, что при увеличении количества отводов и количество сэкономленных аппаратных умножений может превышать половину от общего числа аппаратно вычисляемых элементов матрицы. Так при наличии двух отводов экономия аппаратных умножений составляет 28%, а при шести отводах - достигает 70%.
На предприятии был применен способ пространственно-временной обработки радиосигналов, выполненный в соответствии с заявляемым изобретением, подтвердивший реализацию в лабораторных условиях сокращения аппаратных вычислительных ресурсов при сохранении точности расчетов.
Таким образом, представленные сведения свидетельствуют о выполнении при использовании заявляемого изобретения следующей совокупности условий:
- средство, воплощающее заявляемый способ при его осуществлении, относится к области цифровой обработки сигналов и может быть использовано при построении радиотехнических систем;
- средство, воплощающее заявленное изобретение при его осуществлении, предназначено повышения эффективности пространственно-временной обработки радиосигналов путем возможности сокращения вычислительных ресурсов при увеличении размеров вычисляемой матрицы ковариации с сохранением точности расчетов;
- для заявляемого способа в том виде, в котором он охарактеризован в формуле изобретения, подтверждена возможность его осуществления с помощью описанных в заявке и известных до даты приоритета средств и методов.
Следовательно, заявляемое изобретение соответствует условию «промышленная применимость».
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УСТРАНЕНИЯ ПРОСТРАНСТВЕННЫХ ПОМЕХ | 2014 |
|
RU2575973C1 |
| СПОСОБ АДАПТИВНОЙ КОМПЕНСАЦИИ ПОМЕХ В РЕАЛЬНОМ ВРЕМЕНИ | 2002 |
|
RU2271066C2 |
| СПОСОБ КОМПЬЮТЕРНО-ИНТЕРФЕРОМЕТРИЧЕСКОГО ОБНАРУЖЕНИЯ-ПЕЛЕНГОВАНИЯ РАДИОСИГНАЛОВ С РАСШИРЕННЫМ СПЕКТРОМ | 2011 |
|
RU2470315C1 |
| Способ повышения точности пеленгования источников радиоизлучения обнаружителем-пеленгатором с многошкальной антенной системой | 2019 |
|
RU2713235C1 |
| Способ пространственно-временной адаптивной обработки сигналов в моноимпульсной корабельной радиолокационной станции с активной фазированной антенной решеткой | 2018 |
|
RU2735216C2 |
| Способ адаптивной обработки сигналов в модульной фазированной антенной решетке | 2016 |
|
RU2629921C1 |
| СПОСОБ МНОГОСИГНАЛЬНОЙ ПЕЛЕНГАЦИИ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ НА ОДНОЙ ЧАСТОТЕ | 2008 |
|
RU2382379C2 |
| СПОСОБ ИЗМЕРЕНИЯ ВЗАИМНОЙ ЗАДЕРЖКИ СИГНАЛОВ | 2014 |
|
RU2568897C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2013 |
|
RU2551355C1 |
| ЛОГАРИФМИЧЕСКАЯ ОЦЕНКА ПРАВДОПОДОБИЯ, ОСНОВАННАЯ НА ОШИБКАХ ОЦЕНКИ КАНАЛА, ОБУСЛОВЛЕННЫХ ЗАЩИТНЫМИ ПОДДИАПАЗОНАМИ | 2005 |
|
RU2358400C2 |
Изобретение относится к радиотехнике, в частности к методам цифровой обработки радиосигналов. Технический результат - повышение эффективности пространственно-временной обработки радиосигналов путем сокращения аппаратных вычислительных средств при сохранении точности расчетов. Результат достигается тем, что предложен способ пространственно-временной обработки радиосигналов для компенсации помех, заключающийся в том, что сигналы, поступающие с выходов N-элементной антенной системы, оцифровывают в N аналого-цифровых преобразователях, обрабатывают в цифровом вычислителе, где вычисляют ковариационную матрицу, раскладывают ее для последующей фильтрации, далее сигнал, свободный от некоррелированных помех, передают на входы устройств, предназначенных для извлечения полезной информации, отличающийся тем, что в процессе вычисления ковариационной матрицы применяют линии задержки для сохранения произведений комплексных цифровых сигналов на последних тактах вычислений матрицы ковариации, на основе вычисленных произведений восстанавливают отсутствующие элементы матрицы ковариации, при этом на основе ковариационной матрицы рассчитывают обратную матрицу, результаты вычислений которой используют в пространственно-временной обработке сигналов. 7 ил., 1 табл.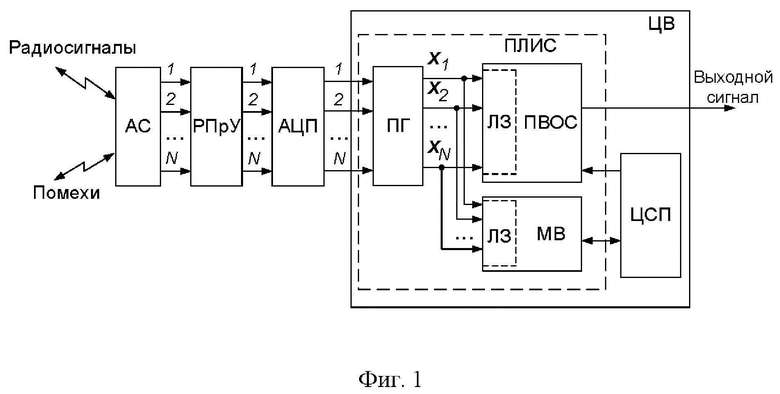
Способ пространственно-временной обработки радиосигналов для компенсации помех, заключающийся в том, что сигналы, поступающие с выходов N-элементной антенной системы, оцифровывают в N аналого-цифровых преобразователях, обрабатывают в цифровом вычислителе, где вычисляют ковариационную матрицу, раскладывают ее для последующей фильтрации, далее сигнал, свободный от некоррелированных помех, передают на входы устройств, предназначенных для извлечения полезной информации, отличающийся тем, что в процессе вычисления ковариационной матрицы применяют линии задержки для сохранения произведений комплексных цифровых сигналов на последних тактах вычислений матрицы ковариации, на основе вычисленных произведений восстанавливают отсутствующие элементы матрицы ковариации, при этом на основе ковариационной матрицы рассчитывают обратную матрицу, результаты вычислений которой используют в пространственно-временной обработке сигналов.
| СПОСОБ УСТРАНЕНИЯ ПРОСТРАНСТВЕННЫХ ПОМЕХ | 2014 |
|
RU2575973C1 |
| СПОСОБ АДАПТИВНОЙ КОМПЕНСАЦИИ ПОМЕХ В РЕАЛЬНОМ ВРЕМЕНИ | 2002 |
|
RU2271066C2 |
| US 7471744 B2, 30.12.2008 | |||
| US 8655298 B2, 18.02.2014 | |||
| Zhao H | |||
| et al | |||
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| - IEEE, 2014 | |||
| - pp | |||
| СПОСОБ ИЗГОТОВЛЕНИЯ НА ТКАЦКИХ СТАНКАХ ГОТОВЫХ ПРЕДМЕТОВ БЕЛЬЯ И ОДЕЖДЫ | 1920 |
|
SU724A1 |

