ОБЛАСТЬ ТЕХНИКИ
Заявленное техническое решение, в общем, относится к области вычислительной техники, а, в частности, к устройству комплексного контроля технического состояния электромеханического оборудования.
УРОВЕНЬ ТЕХНИКИ
С ростом автоматизации современного производства повышаются требования к его надежности. Таким образом, контроль технического состояния оборудования становится наиболее перспективным и быстро развивающимся аспектом современного машиностроения.
Современный уровень развития аппаратных и программных средств позволяет проводить высококачественный сбор и обработку данных, а также отображение информации и принятие решения о состоянии оборудования. Одним из перспективных направлений развития средств контроля технического состояния оборудования является использование нейронных сетей. Требуется единый аппарат для обработки информации разной физической природы, поэтому для решения задач контроля в наибольшей степени подходят нейронные сети [1, 2].
Из уровня техники известен патент на изобретение RU2578044С1 «УСТРОЙСТВО ДИАГНОСТИРОВАНИЯ И ОЦЕНКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ МЕХАТРОННЫХ ПРИВОДОВ», Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования "Ижевский государственный технический университет имени М.Т. Калашникова", опубл. 20.03.2016.
В данном патенте описывается устройство диагностирования и оценки технического состояния мехатронных приводов, содержащее мехатронный модуль, включающий в себя узел точной механики с подключенными к нему электрическим двигателем и блоком управления. При этом устройство дополнительно содержит датчики сопротивления и силы тока, входы которых подключены к обмоткам электрического двигателя, а также датчики вибрации и температуры, установленные в корпусе мехатронного модуля. Выход датчика сопротивления подключен к блоку тестовой диагностики, а выходы датчиков силы тока, вибрации и температуры подключены к блоку расчета тренда и блоку функциональной диагностики. Выходы упомянутых блоков подключены к блоку расчета остаточного ресурса, выход которого подключен к блоку индикации. Блок расчета остаточного ресурса может быть выполнен на основе микропроцессорной системы, а блок индикации - на основе матричного LCD-индикатора.
Недостатком известного решения в данной области техники является следующее: техническое состояние оборудования определяется по тренду изменения контролируемых параметров. При этом учитывается лишь общий уровень этих параметров. Уровень тока, вибрации или температуры относятся к категориям интегральной оценки привода и только косвенно учитывают изменения в отдельных элементах привода (смазка, подшипники, обмотка статора, биения ротора, зубчатая передача и др.). Это обстоятельство не позволяет точно определять источник явного дефекта в электромеханической системе.
Наиболее близким аналогом заявленного технического решения является устройство прогнозирования остаточного ресурса электромеханической системы, описанное в патенте на полезную модель RU146951U1 «УСТРОЙСТВО ПРОГНОЗИРОВАНИЯ ОСТАТОЧНОГО РЕСУРСА ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ», Шпрехер Дмитрий Маркович, опубл. 20.10.2014.
В данном патенте описывается устройство прогнозирования остаточного ресурса электромеханической системы, содержащее измерительный блок, коммутатор, аналого-цифровой преобразователь (АЦП), блок управления, блок визуализации, вычислительное устройство, содержащее модуль обработки сигналов и блок сравнения, блок регистрации времен наработки функциональных блоков электромеханической системы (ЭМС), модуль обработки сигналов вычислительного устройства выполнен из блока нейросетевого прогнозирования, содержащего нейронную сеть, к второму входу которой подключены блок обучения нейронной сети и блок, отвечающий за структуру нейронной сети, в вычислительное устройство дополнительно введены блок определения ближайшего к предельному контролируемого параметра, блок вычисления остаточного ресурса ЭМС, блок предельных значений, контролируемых параметров, блок временной задержки и блок сравнения, причем выходы объекта контроля связаны с входами коммутатора посредством измерительного блока, выход коммутатора связан с АЦП, выход которого связан с первым входом нейронной сети блока нейросетевого прогнозирования и первым входом блока временной задержки, второй вход которого связан с выходом блока управления, связанным с блоком коммутатора, блок управления связан со вторым входом блока определения ближайшего к предельному контролируемого параметра, выход которого связан с первым входом блока вычисления остаточного ресурса ЭМС, второй вход которого связан с выходом блока предельных значений контролируемых параметров, а третий вход его связан с выходом блока регистрации времен наработки функциональных блоков ЭМС, связанным с объектом контроля, выход блока вычисления остаточного ресурса ЭМС связан с входом блока визуализации, выход блока временной задержки связан с первым входом блока сравнения, второй вход которого связан с выходом нейронной сети блока нейросетевого прогнозирования, а выход блока сравнения - с блоком, отвечающим за структуру нейронной сети.
Недостатком известного решения является то, что оно оценивает общий уровень контролируемого сигнала, что затрудняет поиск истинного источника развивающегося отказа элементов привода.
Предлагаемое к рассмотрению техническое решение направлено на устранение недостатков современного уровня техники.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Технической задачей, на решение которой направлено заявленное техническое решение, является создание устройства комплексного контроля технического состояния электромеханического оборудования для диагностирования мехатронных и электромеханических систем. Данное устройство предназначено для комплексного контроля технического состояния и прогнозирования остаточного ресурса элементов электромеханического оборудования в процессе эксплуатации.
Технический результат заключается в повышении эффективности процесса контроля технического состояния электромеханического оборудования.
Заявленный технический результат достигается за счет устройства комплексного контроля технического состояния электромеханического оборудования, содержащего:
- блок визуализации (БВ);
- измерительный блок, внутри которого расположены:
коммутатор (К) и аналого-цифровой преобразователь (АЦП), связанные между собой по линиям GPIO;
блок ввода и обработки сигнала (БВОС), выполненный с возможностью получения диагностических данных с установленных датчиков тока и вибрации на электромеханическом оборудовании через коммутатор (К) и аналого-цифровой преобразователь (АЦП);
блок вычисления дискретного вейвлет-преобразования (БВДВП), выполненный с возможностью получения сигналов тока и вибрации и разложения полученной совокупности сигналов тока и вибрации на дискретные вейвлет-коэффициенты, после чего вычисляются среднеквадратические (СКЗ) и пиковые значения (ПИК) каждого из вейвлет-коэффициентов и всего сигнала по каждому контролируемому сигналу тока и вибрации;
- вычислительное устройство, содержащее связанные между собой:
блок принятия решений, содержащий модуль выделения наиболее значимых к техническому состоянию вейвлет-коэффициентов (МВЗВК) и модуль нейронной сети (МНС) и выполненный с возможностью выявления соответствия полученных от БВДВП СКЗ и ПИК с текущим состоянием оборудования при помощи обученной нейронной сети, путем подачи диагностического параметра на один из нейронов выходного слоя и проведения его через все скрытые слои к входному слою для получения числовой характеристики входных нейронов, по отношению к данному выходному нейрону, а также выделение значимых вейвлет-коэффициентов;
блок вычисления остаточного ресурса (БВОР), выполненный с возможностью проводить анализ статистических данных выделенных вейвлет-коэффициентов в МВЗВК и их диагностических параметров (СКЗ и ПИК), а также характер их изменений и выполненный с возможностью определять техническое состояние отдельных элементов электромеханического оборудования, прогнозировать остаточный ресурс их работы на основе полученных от БВОС данных и передавать спрогнозированные результаты в блок визуализации, который отображает элементы электромеханического оборудования и указывает по результатам работы устройства комплексного контроля их техническое состояние и спрогнозированный остаточный ресурс с определенной вероятностью.
В одном из частных примеров разложение сигналов тока и вибрации на дискретные вейвлет-коэффициенты происходит с применением материнского вейвлета Добеши.
ОПИСАНИЕ ЧЕРТЕЖЕЙ
Реализация изобретения будет описана в дальнейшем в соответствии с прилагаемыми чертежами, которые представлены для пояснения сути изобретения и никоим образом не ограничивают область изобретения. К заявке прилагаются следующие чертежи:
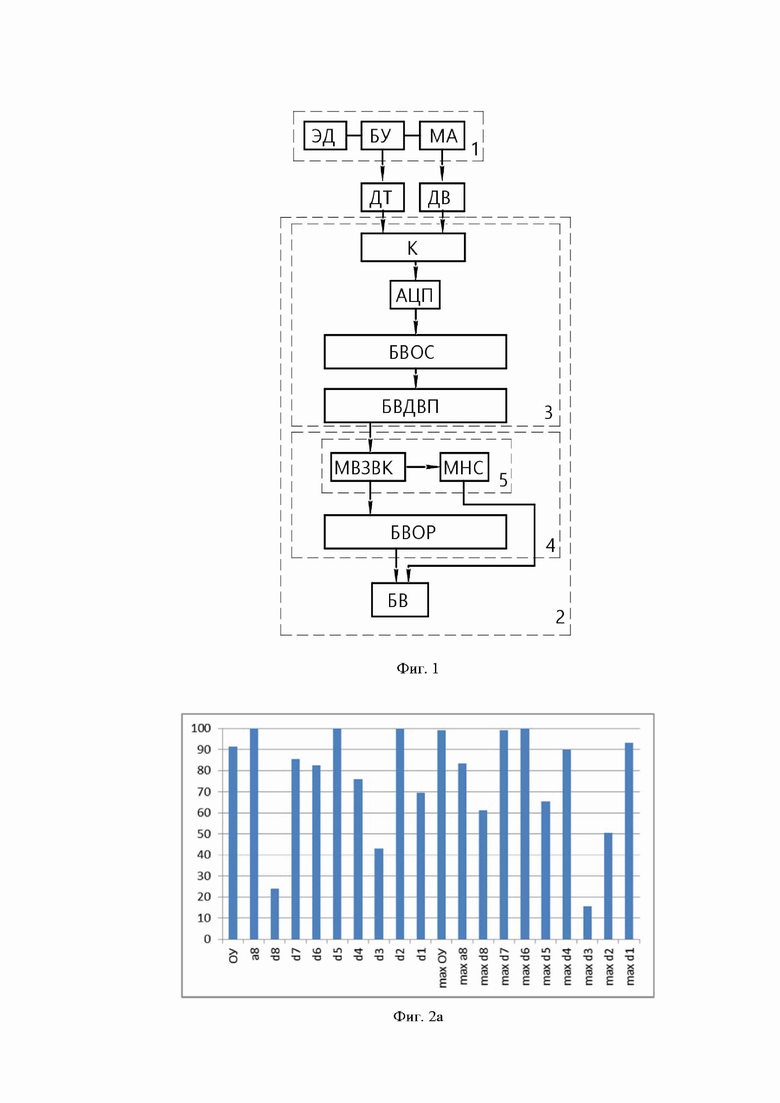
Фиг. 1 иллюстрирует структурную схему устройства комплексного контроля технического состояния.
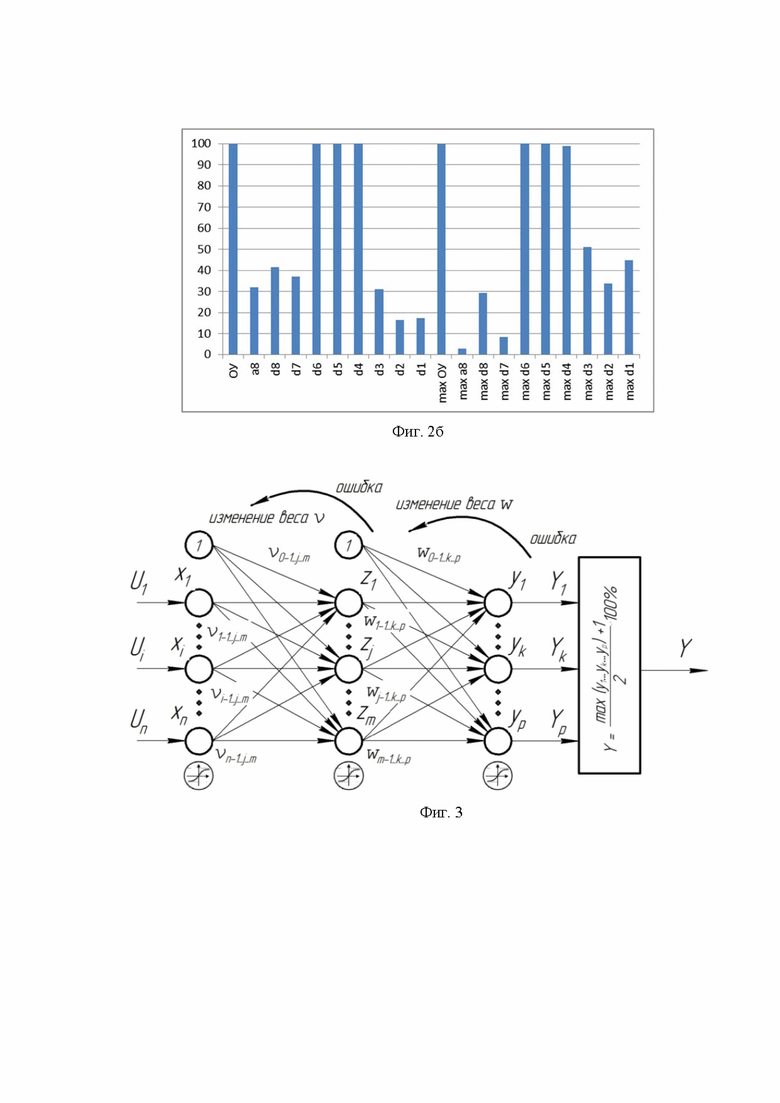
Фиг. 2 иллюстрирует пример выделения значимых вейвлет-коэффициентов и их диагностических параметров в блоке принятия решений (на оси ординат указан уровень их достоверности, в %) при отсутствии смазки зубчатой передачи: а) из сигнала виброускорения, б) из сигнала тока первой фазы: ОУ - общий уровень, max - пиковое значение (ПИК).
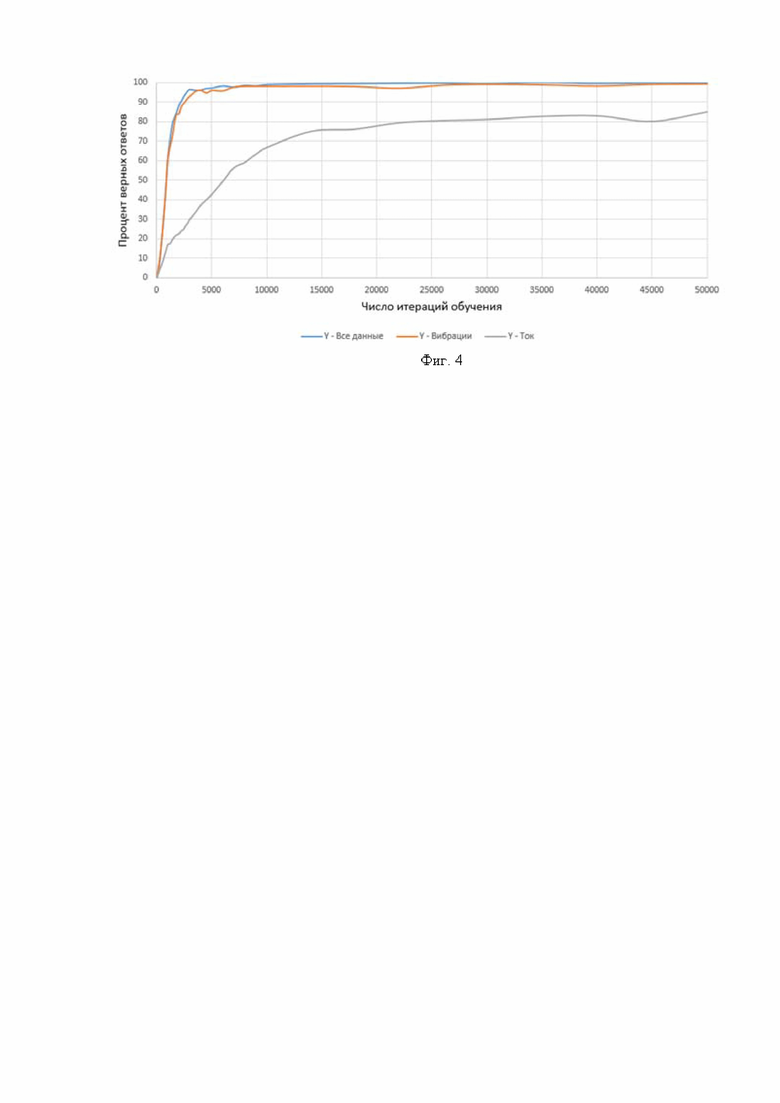
Фиг. 3 иллюстрирует архитектуру нейронной сети.
Фиг. 4 иллюстрирует эффективность обучения искусственной нейронной сети при использовании различных входных данных.
ДЕТАЛЬНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
В приведенном ниже подробном описании реализации изобретения приведены многочисленные детали реализации, призванные обеспечить отчетливое понимание настоящего изобретения. Однако, квалифицированному в предметной области специалисту будет очевидно, каким образом можно использовать настоящее изобретение как с данными деталями реализации, так и без них. В других случаях хорошо известные методы, процедуры и компоненты не были описаны подробно, чтобы не затруднять понимание особенностей настоящего изобретения.
Кроме того, из приведенного изложения будет ясно, что изобретение не ограничивается приведенной реализацией. Многочисленные возможные модификации, изменения, вариации и замены, сохраняющие суть и форму настоящего изобретения, будут очевидными для квалифицированных в предметной области специалистов.
В заявленном техническом решении предлагается устройство комплексного контроля технического состояния электромеханического оборудования с блоком принятия решений на основе нейронной сети.
На фиг. 1 приведена структурная схема устройства комплексного контроля технического состояния, которое состоит из следующих элементов:
1 - электромеханическое оборудование в состав, которого, например, могут входить: ЭД - электродвигатель, БУ - блок управления, МА - машинный агрегат;
2 - устройство комплексного контроля технического состояния электромеханического оборудования в состав, которого входят: 3 - измерительный блок, внутри которого расположены: К - коммутатор, АЦП - аналого-цифровой преобразователь, БВОС - блок ввода и обработки сигнала, БВДВП - блок вычисления дискретного вейвлет-преобразования,
4 - вычислительное устройство, содержащее связанные между собой: 5 - блок принятия решений, содержащий модуль выделения наиболее значимых к техническому состоянию вейвлет-коэффициентов (МВЗВК) и модуль нейронной сети (МНС), БВОР - блок вычисления остаточного ресурса;
БВ - блок визуализации, выполненный в виде веб-интерфейса, и связан с вычислительным устройством (4) с использованием Next.js и Fetch API через REST API, включает асинхронную передачу данных между клиентской частью на Next.js и сервером через HTTP-запросы к REST API. Next.js обеспечивает серверный рендеринг (SSR) и статическую генерацию страниц (SSG), а безопасность обеспечивается HTTPS и токенами аутентификации.
Устройство комплексного контроля (2) технического состояния электромеханического оборудования (1), включает:
- измерительный блок (3), выполненный на основе микроконтроллера для осуществления предварительной обработки данных, полученных с диагностических датчиков тока (ДТ) и датчиков вибрации (ДВ) и внутри которого расположены:
коммутатор (К) и аналого-цифровой преобразователь (АЦП), связанные между собой по линиям GPIO;
блок ввода и обработки сигнала (БВОС), выполненный с возможностью получения диагностических данных с установленных датчиков тока и вибрации на электромеханическом оборудовании через коммутатор (К) и аналого-цифровой преобразователь (АЦП);
блок вычисления дискретного вейвлет-преобразования (БВДВП), выполненный с возможностью получения сигналов тока и вибрации и разложения полученной совокупности сигналов тока и вибрации на дискретные вейвлет-коэффициенты, после чего вычисляются среднеквадратические (СКЗ) и пиковые значения (ПИК) каждого из вейвлет-коэффициентов и всего сигнала по каждому контролируемому сигналу тока и вибрации.
Измерительный блок (3) подключается к вычислительному устройству (серверу) (4) по локальной сети или через Internet с использованием технологии Wi-Fi на основе стандартов IEEE 802.11 и протокола MQTT.
- вычислительное устройство (4), выполненное в виде сервера. Данное устройство (4) состоит из:
блока принятия решений, содержащего модуль выделения наиболее значимых к техническому состоянию вейвлет-коэффициентов (МВЗВК) и модуля нейронной сети (МНС) и выполненного с возможностью выявления соответствия полученных от БВДВП СКЗ и ПИК с текущим состоянием оборудования при помощи обученной нейронной сети;
блока вычисления остаточного ресурса (БВОР), выполненного с возможностью проводить анализ статистических данных выделенных вейвлет-коэффициентов и их диагностических параметров (СКЗ и ПИК), а также характер их изменений и выполненный с возможностью определять техническое состояние отдельных элементов электромеханического оборудования, прогнозировать остаточный ресурс их работы на основе полученных от БВОС данных и передавать спрогнозированные результаты в блок визуализации, который отображает элементы электромеханического оборудования и указывает по результатам работы устройства комплексного контроля их техническое состояние и спрогнозированный остаточный ресурс с определенной вероятностью.
На основе применения основных принципов построения систем принятия решений используется модель распознавания технических состояний электромеханического оборудования на базе 3-х слойного нейросетевого классификатора с нелинейной функцией активации вычислительных элементов в слое (биполярный сигмоид) и алгоритмом обучения на основе обратного распространения ошибки. Предложенная модель способна вырабатывать решение о состоянии объекта на различные сочетания диагностических параметров, которые ранее в обучающей выборке не встречались, и тем самым повышая достоверность распознавания технического состояния оборудования.
Разработанная архитектура (фиг. 3) включает в себя входной слой (80 нейронов, обозначены x1,…,xi,…,xn), промежуточный слой (1000 нейронов, обозначены z1,…,zj,…,zm) и выходной слой (например, 8 нейронов, обозначены y1,…,yk,…,yp). На входной слой поступает информация о текущем состоянии диагностических параметров (обозначена U1,…,Ui,…,Un, количество нейронов равно количеству диагностических параметров), на промежуточном слое происходит обработка данных, причем большее количество нейронов приводит в итоге к более точным результатам и уменьшению производительности работы сети в целом. На выходном слое происходит выдача решений о состоянии объекта (количество нейронов равно количеству распознаваемых состояний оборудования).
Нейроны, представляющие собой выходы сети (обозначены Y1,…,Yk,…,Yp), и скрытые нейроны могут иметь смещение 1. Эти смещения служат в качестве весов на связях (ν, w), исходящих от нейронов, на выходе которых всегда появляется 1. В процессе обучения сигналы распространяются в обратном направлении, где вычисляется ошибка ответа сети и происходит корректировка весовых коэффициентов ν и w. Выходной сигнал Y принимает максимальное значение в %, которое соответствует конкретному техническому состоянию оборудования (вероятности этого состояния).
Ниже приведен общий алгоритм работы устройства комплексного контроля технического состояния электромеханического оборудования.
Осуществляют снятие с датчиков вибраций и датчиков тока на обмотках приводного двигателя осциллограмм вибрации и тока соответственно. В частном случае датчики тока устанавливаются в блоке управления электродвигателем (на три фазы), а датчик вибрации - в контрольной точке на зубчатом редукторе в соответствии с ГОСТ Р ИСО 13373-1-2009.
Получают спектр дискретного вейвлет-преобразования для тока, виброскорости и виброускорения, с применением материнского вейвлета Добеши, 8 уровней разложения.
Находят среднеквадратические (СКЗ) и максимальные значения (ПИК) вейвлет-коэффициентов и определяют общие уровни виброускорения, виброскорости и потребляемого тока. Полученное множество вейвлет-коэффициентов поступает на вход блока принятия решений. В заявленном решении приведена архитектура и программное обеспечение блока принятия решений на основе нейронной сети, а также проведено его обучение и тестирование. Нейронная сеть представляет собой 3-х-слойный персептрон с нелинейной функцией активации и алгоритмом обучения на основе обратного распространения ошибки. Каждый нейрон выходного слоя соответствует определенному техническому состоянию контролируемого объекта и указывает на вероятность этого состояния.
Выявляют соответствия полученных СКЗ и ПИК с текущим состоянием оборудования при помощи обученной нейронной сети, а также выделяют значимые вейвлет-коэффициенты.
В блоке принятия решений принимают решение о техническом состоянии объекта. Получают тренды изменения наиболее чувствительных коэффициентов вейвлет-преобразования виброускорения, виброскорости и тока, а также их диагностических параметров (СКЗ и ПИК). Осуществляют анализ скорости изменения полученных трендов в соответствии с алгоритмом прогнозирования остаточного ресурса и оценки остаточного ресурса работы.
После чего выводят информацию о текущем техническом состоянии и остаточном ресурсе работы объекта в блок визуализации - веб-интерфейс.
Таким образом, каждая выборка, на основании которой делается вывод о техническом состоянии, включает в себя 20 параметров (общий уровень и параметры вейвлет-коэффициентов - СКЗ и ПИК) по каждому информационному потоку (виброускорение, виброскорость и три фазы тока).
Поскольку в каждом полученном вейвлет-коэффициенте отражаются определенные диапазоны частот сигналов, соответствующие источникам развития дефектов (как двигателя, так и машинного агрегата), а СКЗ и ПИК отдельных коэффициентов изменяются значительно по отношению к техническому состоянию оборудования, т.е. их изменение существенно отличается от изменения других коэффициентов, то эти вейвлет-коэффициенты учитываются при оценке технического состояния электромеханического оборудования. Наиболее значимые вейвлет-коэффициенты для оценки технического состояния оборудования выделяются в результате работы блока принятия решений с уровнем доверия к этим результатам. Это достигается путем подачи диагностического параметра на один из нейронов выходного слоя и проведения его через все скрытые слои к входному слою, в результате чего возможно получить числовую характеристику входных нейронов, по отношению к данному выходному нейрону. Например, для диагноза «Отсутствие смазки зубчатой передачи» (см. фиг. 2) наиболее чувствительными являются вейвлет-коэффициенты a8, d5, d2 и пиковые значения (max) общего уровня и коэффициентов d7, d6 виброускорения (уровень достоверности 99-100%), а также общий уровень, коэффициенты d6, d5, d4, пиковые значения (max) общего уровня и коэффициентов d6, d5, d4 тока первой фазы (уровень достоверности 99-100%).
Полученные значимые вейвлет-коэффициенты и их диагностические параметры передаются в блок прогнозирования остаточного ресурса, который производит анализ статистических данных, а также характер изменений и определяет техническое состояние отдельных элементов электромеханического оборудования, прогнозирует остаточный ресурс их работы на основе полученных от БВОС данных и передает спрогнозированные результаты в блок визуализации, который отображает элементы электромеханического оборудования и указывает по результатам работы устройства комплексного контроля их техническое состояние и спрогнозированный остаточный ресурс с определенной вероятностью. Результатом работы блока принятия решений и блока прогнозирования остаточного ресурса является представление в формализованном виде решения о техническом состоянии объекта и оценка остаточного ресурса работы с уровнями доверия к этому решению (доверительной вероятности, в %), которое выводится в блок визуализации.
Обучение блока принятия решений проводилось на основе экспериментальных данных, полученных на лабораторном стенде при имитации дефектов [2]. Обучающая выборка включала в себя 20 параметров (общий уровень и вейвлет-коэффициенты Добеши db-8 - средние квадратические значения (далее - СКЗ) и их максимальные значения - max) по каждому информационному потоку (виброукорение, виброскорость и две фазы тока). На одинаковой выборке, состоящей из 4288 измерений (по 80 параметров: 20 параметров на каждый информационный поток), проведено обучение нейронной сети (около 40000 итераций), результат которой приведен в табл. 1.
Таблица 1 - Результаты обучения нейронной сети
Для дополнительного обоснования наличия связи механических и электрических параметров приведены результаты обучения блока принятия решений (одинаковой архитектуры: один скрытый слой с 1000 нейронов) при подаче на ее вход только вибрационных (табл. 2) и только токовых параметров (табл. 3).
Из полученных результатов видно, что архитектура нейронной сети показывает при обучении хорошие результаты при подаче на вход только вибрационных данных (табл. 2). Однако при сравнении этих результатов обучении с результатами, полученными на параметрах вибрации и тока (табл. 1) можно сделать вывод, что при меньшем количестве итераций (времени обучения), мы получаем примерно одинаковый процент правильных ответов и меньшее значение ошибки.
Таблица 2 - Результаты обучения нейронной сети при подаче на вход параметров виброускорения и виброскорости
Таблица 3 - Результаты обучения нейронной сети при подаче на вход параметров тока (фаза 1 и фаза 2).
На фиг. 4 показана эффективность обучения искусственной нейронной сети при использовании различных входных данных: «все данные» - на вход нейронной сети подаются как вибрационные (виброускорение и виброскорость), так и токовые данные.
Из представленного графика видно, что при подаче на вход только токовых данных, эффективность обучения сильно падает. Однако если сравнить обучение с использованием только вибрационных данных, с обучением при комплексных данных, можно сделать вывод, что при достижении 70% и выше значений, токовые параметры оказывают существенное влияние на длительность обучения.
Следовательно, обучение нейронной сети проводится наиболее эффективно при увеличении количества входных параметров. Положительную динамику при обучении также можно объяснить наличием одинаковой реакции контролируемых параметров вибрации и тока на возникновение дефектов и неисправностей.
На основании этого, отличительными признаками заявленного устройства является дополнительное введение в вычислительное устройство блока вычисления дискретного вейвлет-преобразования и модуля выделения значимых вейвлет-коэффициентов в составе блока принятия решений.
Указанные признаки являются существенными, так как в данном блоке производится разложение контролируемых сигналов тока и вибрации на вейвлет-коэффициенты, выделяются СКЗ и ПИК. Принцип работы устройства комплексного контроля технического состояния электромеханического оборудования отличается совместным анализом механических и электрических параметров. Тем самым повышается достоверность результатов диагностирования по сравнению с прототипом.
Таким образом, на основе анализа вейвлет-коэффициентов тока и вибрации обеспечивается выявление вида дефекта или неисправности электромеханического оборудования опасных элементов. В результате чего повышается эффективность контроля технического состояния электромеханического оборудования путем использования комплексного анализа с применением блока принятия решений на основе нейронной сети.
В настоящих материалах заявки было представлено предпочтительное осуществление заявленного технического решения, которое не должно использоваться как ограничивающее иные частные воплощения его реализации, которые не выходят за рамки испрашиваемого объема правовой охраны и являются очевидными для специалистов в соответствующей области техники.
Литература:
1. Stepanov, P., and Yu. Nikitin, “Diagnostics of Mechatronic Systems on the Basis of Neural Networks with High-Performance Data Collection,” Mechatronics 2013: Recent Technological and Scientific Advances. Springer International Publishing, Swizerland, pp. 433-440, 2014.
2. Степанов, П.И. Разработка и тестирование блока принятия решений для системы контроля технического состояния электромеханического оборудования / П.И. Степанов // Южно-Сибирский научный вестник. - 2020. - № 1. - С. 108-113.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ вибродиагностики электродвигателей постоянного тока с применением метода вейвлет-анализа | 2021 |
|
RU2769990C1 |
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ И ОЦЕНКИ ОСТАТОЧНОГО РЕСУРСА ЭЛЕКТРОМЕХАНИЧЕСКОГО АГРЕГАТА С АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2016 |
|
RU2626231C1 |
| УСТРОЙСТВО КОМПЛЕКСНОГО АНАЛИЗА ЭНЕРГОПОТРЕБЛЕНИЯ В ЭЛЕКТРИЧЕСКИХ СЕТЯХ НИЗКОГО НАПРЯЖЕНИЯ | 2024 |
|
RU2837721C1 |
| Способ определения технического состояния электрических и гидравлических приводов | 2022 |
|
RU2799489C1 |
| СПОСОБ И СИСТЕМА УЧЕТА ОСТАТОЧНОГО РЕСУРСА КОМПОНЕНТОВ ТУРБОАГРЕГАТА | 2017 |
|
RU2668852C1 |
| СПОСОБ ОЦЕНКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОТРЕБИТЕЛЯ-РЕГУЛЯТОРА НА ОСНОВЕ НЕЙРОСЕТЕВОГО ДИАГНОСТИРОВАНИЯ | 2019 |
|
RU2719507C1 |
| ИЗМЕРИТЕЛЬ ВИБРАЦИИ | 2020 |
|
RU2754243C1 |
| УСТРОЙСТВО ДИАГНОСТИРОВАНИЯ В РЕАЛЬНОМ ВРЕМЕНИ СИСТЕМЫ ЭЛЕКТРОДВИЖЕНИЯ СУДНА | 2010 |
|
RU2451299C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВИБРОСКОРОСТИ И ДАТЧИК ВИБРОСКОРОСТИ | 2021 |
|
RU2780303C1 |
| УСТРОЙСТВО ТЕХНИЧЕСКОГО ДИАГНОСТИРОВАНИЯ КОМПЛЕКСА БОРТОВОГО ОБОРУДОВАНИЯ ВОЗДУШНЫХ СУДОВ НА ОСНОВЕ МАШИННОГО ОБУЧЕНИЯ | 2024 |
|
RU2831917C1 |
Изобретение относится к области вычислительной техники, в частности к устройству комплексного контроля технического состояния электромеханического оборудования. Техническим результатом является повышение эффективности процесса контроля технического состояния электромеханического оборудования. 1 з.п. ф-лы, 5 ил., 3 табл.
1. Устройство комплексного контроля технического состояния электромеханического оборудования, содержащее:
блок визуализации (БВ);
измерительный блок, внутри которого расположены:
коммутатор (К) и аналого-цифровой преобразователь (АЦП), связанные между собой по линиям GPIO;
блок ввода и обработки сигнала (БВОС), выполненный с возможностью получения диагностических данных с установленных датчиков тока и вибрации на электромеханическом оборудовании через коммутатор (К) и аналого-цифровой преобразователь (АЦП);
блок вычисления дискретного вейвлет-преобразования (БВДВП), выполненный с возможностью получения сигналов тока и вибрации и разложения полученной совокупности сигналов тока и вибрации на дискретные вейвлет-коэффициенты, после чего вычисляются среднеквадратические (СКЗ) и пиковые значения (ПИК) каждого из вейвлет-коэффициентов и всего сигнала по каждому контролируемому сигналу тока и вибрации;
вычислительное устройство, содержащее связанные между собой:
блок принятия решений, содержащий модуль выделения наиболее значимых к техническому состоянию вейвлет-коэффициентов (МВЗВК), модуль нейронной сети (МНС) и выполненный с возможностью выявления соответствия полученных от БВДВП СКЗ и ПИК с текущим состоянием оборудования при помощи обученной нейронной сети, путем подачи диагностического параметра на один из нейронов выходного слоя и проведения его через все скрытые слои к входному слою для получения числовой характеристики входных нейронов, по отношению к данному выходному нейрону, а также выделение значимых вейвлет-коэффициентов;
блок вычисления остаточного ресурса (БВОР), выполненный с возможностью проводить анализ статистических данных выделенных вейвлет-коэффициентов в МВЗВК и их диагностических параметров (СКЗ и ПИК), а также характер их изменений и выполненный с возможностью определять техническое состояние отдельных элементов электромеханического оборудования, прогнозировать остаточный ресурс их работы на основе полученных от БВОС данных и передавать спрогнозированные результаты в блок визуализации, который отображает элементы электромеханического оборудования и указывает по результатам работы устройства комплексного контроля их техническое состояние и спрогнозированный остаточный ресурс с определенной вероятностью.
2. Устройство по п. 1, характеризующееся тем, что разложение сигналов тока и вибрации на дискретные вейвлет-коэффициенты происходит с применением материнского вейвлета Добеши.
| СПОСОБ КОМПЛЕКСНОГО ДИАГНОСТИРОВАНИЯ ЭЛЕКТРИЧЕСКИХ МАШИН АВТОМОБИЛЬНОЙ ТЕХНИКИ | 2019 |
|
RU2742525C1 |
| Способ определения технического состояния электрических и гидравлических приводов | 2022 |
|
RU2799489C1 |
| СПОСОБ ОЦЕНКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОТРЕБИТЕЛЯ-РЕГУЛЯТОРА НА ОСНОВЕ НЕЙРОСЕТЕВОГО ДИАГНОСТИРОВАНИЯ | 2019 |
|
RU2719507C1 |
| CN 108614522 B, 09.08.2019 | |||
| WO 2013192492 A1, 27.12.2013. | |||

