ОБЛАСТЬ ТЕХНИКИ
[1] Настоящее техническое решение, в общем, относится к измерительной технике, а более конкретно, к датчику виброскорости MEMS-типа для контроля уровня вибраций объекта в области инфранизких и низких частот и малых амплитудных значений колебаний в пространстве, по трем осям декартовых координат.
УРОВЕНЬ ТЕХНИКИ
[2] В современном мире присутствует огромное количество технических систем и оборудования, такого как трубопроводы, станки, вентиляторы, роторы, насосы и т.д., выход из строя которых может привести к неблагоприятным последствиям. При работе таких объектов (оборудование с возвратно-поступательным или вращательным типом движения, оборудование ударного и ударно-вращательного действия и т.д.), возникающая вибрация может ускорять износ указанных объектов, увеличивать зазоры между внутренними деталями, приводить к разрушению крепежных конструкций и, в целом, приводить объект в негодность. Во избежание непредвиденных и дорогостоящих поломок, на таких объектах, как правило, устанавливаются устройства мониторинга уровня вибраций для осуществления регулярного мониторинга вибраций.
[3] В настоящий момент такие устройства являются незаменимыми при осуществлении мониторинга различного оборудования, технических систем и различного рода конструкций (далее объекты). Измеряемые с помощью таких устройств параметры вибрации позволяют диагностировать состояние исследуемого объекта, оценивать его техническое состояние и выявлять неисправности путем сравнения текущих параметров вибрации, создаваемых работающим объектом, с нормами параметров вибрации для указанного объекта. Устройствами мониторинга уровня вибраций, как правило, являются датчики вибрации различных типов. В настоящее время наиболее распространенными датчиками вибрации являются пьезоэлектрические, тензорезистивные и микроэлектромеханические (МЭМС) датчики, построенные на базе акселерометров. В таких датчиках в качестве первичных преобразователей ускорения применяются акселерометры, соответствующие типу датчика.
[4] Тензорезистивные датчики вибраций предназначены для измерения вибраций частотой несколько десятков герц. В указанных датчиках с помощью тензорезисторов происходит измерение деформации чувствительного элемента, соединяющего колеблющуюся сейсмическую массу с корпусом преобразователя.
[5] К недостаткам следует отнести влияние температуры на сопротивление тензорезисторов температуры, невозможность их работы в условиях сильных динамических нагрузок, а также сильную зависимость точности измерения от материала, с помощью которого датчик крепится к объекту (возникновение гистерезиса), что практически исключает его применение для мониторинга уровня вибраций в промышленном оборудовании и сложных технических системах с высокими нагрузками и высокими рабочими температурами (например, система охлаждения здания и т.д.).
[6] Пьезоэлектрические датчики контроля уровня вибраций являются наиболее точными, однако указанный тип датчиков не подходит для решения задач контроля вибрации объекта в пространстве по трем осям декартовых координат, поскольку требуется размещение 3-х отдельных датчиков на объекте (ввиду особенностей пьезоэлектрических акселерометров), что в некоторых ситуациях является практически невозможным. Кроме того, пьезоэлектрические преобразователи имеют высокую стоимость.
[7] Из уровня техники известен беспроводной датчик вибрации, описанный в патенте РФ № RU 2437071 C2 (Общество с ограниченной ответственностью Научно-производственный центр “Диагностика, надежность машин и комплексная автоматизация”), опубл. 20.12.2011. Указанный датчик содержит корпус, в котором расположены устройства обработки сигнала, устройства передачи сигнала, источник питания и акселерометр, закрепленный в указанном корпусе с помощью эластичной мембраны. Такой датчик обеспечивает расширенную полосу измеряемых частот за счет крепления акселерометра с помощью эластичной мембраны.
[8] К недостаткам указанного решения можно отнести невозможность контроля вибрации по трем взаимно-ортогональным осям координат, а также наличие сильных собственных шумов (ввиду особенности конструкции), что не позволяет точно измерять вибрацию в области низких и инфранизких частот и малых амплитудных значений колебаний в пространстве.
[9] Из уровня техники известно устройство для измерения параметров вибрации, раскрытое в патенте РФ № RU 189841 U1 (Прыгунов Александр Германович и др.), опубл. 06.06.2019. Указанное устройство содержит корпус, внутри которого имеется датчик вибрации MEMS-типа, соединенный с микроконтроллером и с блоком питания, а также датчик температуры основания корпуса устройства и датчик температуры микроконтроллера, соединенные с вычислительным ядром микроконтроллера. Указанное устройство повышает точность измерения параметров вибрации за счет контроля температуры и корректировки данных при измерении вибрации датчиком вибрации MEMS-типа.
[10] К недостаткам такого решения можно отнести присутствие сильных собственных шумов, за счет которых снижается точность измерения параметров вибрации в области низких и инфранизких частот и малых амплитудных значений колебаний в пространстве.
[11] Общим недостатком указанных решений является отсутствие в их конструкции датчика виброскорости MEMS-типа, способного точно измерять параметры вибрации в пространстве по трем осям декартовых координат, в области инфранизких и низких частот, а также малых амплитудных значений колебаний в пространстве, с точностью, соизмеримой с датчиками, построенными на пьезоэлектрических преобразователях. Также такого рода решение должно быть простым и недорогим в изготовлении по сравнению с пьезоэлектрическими датчиками.
СУЩНОСТЬ ТЕХНИЧЕСКОГО РЕШЕНИЯ
[12] Данное техническое решение направлено на устранение недостатков, присущих существующим решениям, известным из уровня техники.
[13] Настоящее изобретение направлено на решение технической проблемы или технической задачи, заключающейся в создании датчика виброскорости, способного с высокой точностью измерять параметры вибрации в пространстве по трем взаимно-ортогональным осям координат, в области инфранизких и низких частот и малых амплитудных значений колебаний в пространстве.
[14] Техническим результатом, достигающимся при решении вышеуказанной технической задачи, является повышение точности измерения уровня вибраций в пространстве датчиком виброскорости в области инфранизких и низких частот и малых амплитудных значений колебаний в пространстве.
[15] Дополнительным техническим результатом, достигаемым при решении вышеуказанной задачи, является расширение арсенала технических средств.
[16] Указанные технические результаты достигаются благодаря осуществлению датчика виброскорости для контроля уровня вибраций в области инфранизких и низких частот, включающего корпус, внутри которого установлена печатная плата, на которой расположены:
• по меньшей мере два микроэлектромеханических трехосевых акселерометра (210 и 211), выполненных с возможностью циклического измерения мгновенного значения ускорения по трем взаимно ортогональным осям;
• микроконтроллер (220), содержащий:
- по меньшей мере два интегратора (230 и 231), выполненных с возможностью формирования по меньшей мере двух наборов массивов мгновенных значений виброскорости на основе мгновенных значений ускорения по трем взаимно ортогональным осям, полученных от микроэлектромеханических трехосевых акселерометров (210 и 211);
- по меньшей мере два модуля спектрального анализа (240 и 241), выполненных с возможностью формирования по меньшей мере двух наборов массивов спектрального распределения виброскорости на основе наборов массивов мгновенных значений виброскорости;
- модуль кросс-корреляции спектра (250), выполненный с возможностью формирования результирующего набора спектров виброскорости на основе по меньшей мере двух наборов массивов спектрального распределения виброскорости;
- модуль вычисления результирующих значений виброскорости (260), выполненный с возможностью вычисления результирующего вектора виброскорости и набора значений виброскорости на основе результирующего набора спектров виброскорости.
[17] В одном частном примере осуществления датчика на печатной плате дополнительно расположен разъем, предназначенный для подключения источника питания.
[18] В другом частном примере осуществления датчика разъем представляет собой проводной последовательный интерфейс.
[19] В другом частном примере осуществления датчика проводной последовательный интерфейс представляет собой интерфейс, выбираемый из группы: RS485, UART, RS422, SPI, I2C.
[20] В другом частном примере осуществления датчика на печатной плате дополнительно расположен приемо-передающий модуль, выполненный с возможностью обмена данными с внешним устройством
[21] В другом частном примере осуществления датчика по меньшей мере два микроэлектромеханических трехосевых акселерометра (210 и 211) представляют собой по меньшей мере акселерометры, выбираемые из группы: емкостные акселерометры, многоосные акселерометры.
[22] В другом частном примере осуществления датчика измерение мгновенных значений виброскорости микроэлектромеханическими трехосевыми акселерометрами по трем взаимно-ортогональным осям координат проводится без юстировки конструкции.
[23] В другом частном примере осуществления датчика акселерометры (210 и 211) содержат аналого-цифровой преобразователь (АЦП).
[24] В другом частном примере осуществления датчика измеряемые акселерометрами (210 и 211), мгновенные значения ускорения включают в себя сумму величины собственного шума и величины измеряемого сигнала.
[25] В другом частном примере осуществления датчика каждый из по меньшей мере двух наборов массивов мгновенных значений виброскорости, сформированных в интеграторах (230 и 231) содержит по меньшей мере три массива мгновенных значений виброскорости по взаимно ортогональным осям.
[26] В другом частном примере осуществления датчика формирование каждого из по меньшей мере двух наборов массивов мгновенных значений виброскорости выполняется параллельно в каждом из интеграторов (230 и 231).
[27] В другом частном примере осуществления датчика формирование каждого из по меньшей мере двух массивов спектрального распределения виброскорости выполняется параллельно в каждом из модулей спектрального анализа (240 и 241).
[28] В другом частном примере осуществления датчика формирование массивов спектрального распределения виброскорости модулями спектрального анализа (240 и 241) выполняется с использованием быстрого преобразования Фурье (БПФ).
[29] В другом частном примере осуществления датчика каждый из по меньшей мере двух наборов массивов спектрального распределения виброскорости, сформированных в модулях спектрального анализа (240 и 241), содержит по меньшей мере три массива спектрального распределения виброскорости по взаимно ортогональным осям.
[30] В другом частном примере осуществления датчика модуль кросс-корреляции спектров (250) выполнен с возможностью вычисления СКЗ виброскорости.
[31] В другом частном примере осуществления датчика результирующий набор спектров виброскорости в модуле кросс-корреляции (250) спектров формируется на основе умножения значений первого из по меньшей мере двух наборов массивов спектрального распределения виброскорости на комплексно-сопряженные значения второго из по меньшей мере двух наборов массивов спектрального распределения виброскорости.
[32] В другом частном примере осуществления датчика результирующий набор спектров виброскорости, сформированный в модуле кросс-корреляции спектров (250), содержит по меньшей мере три результирующих спектра виброскорости по взаимно ортогональным осям.
[33] В другом частном примере осуществления датчика набор значений виброскорости, рассчитанный в вычислительном модуле (260) содержит по меньшей мере три значения виброскорости по взаимно ортогональным осям.
[34] В другом частном примере осуществления датчика корпус датчика выполнен пылевлагозащищенным.
[35] В другом частном примере осуществления датчика корпус является взрывозащитным.
[36] В другом частном примере осуществления датчика взрывозащитный корпус выполнен из материала, выбираемого из группы: низкоуглеродистая сталь с полиэфирным покрытием, нержавеющая сталь AISI 304, полиэфирный пластик, армированный стекловолокном с углеродным наполнителем, литой алюминий с порошковым покрытием.
[37] В другом частном примере осуществления датчика корпус дополнительно содержит магнитное крепление, предназначенное для закрепления датчика на объекте.
[38] Кроме того, заявленные технические результаты достигаются за счет осуществления способа измерения виброскорости для контроля уровня вибраций в области инфранизких и низких частот, выполняемый с помощью датчика виброскорости, и содержащий этапы на которых:
a) активируют датчик виброскорости;
b) получают данные циклического измерения мгновенного значения ускорения от по меньшей мере двух микроэлектромеханических трехосевых акселерометров по трем взаимно ортогональным осям;
c) формируют по меньшей мере два набора массивов мгновенных значений виброскорости на основе полученных мгновенных значений ускорения по трем взаимно ортогональным осям;
d) формируют по меньшей мере два набора массивов спектрального распределения виброскорости на основе наборов массивов мгновенных значений виброскорости, сформированных на этапе (с);
e) формируют результирующий набор спектров виброскорости на основе по меньшей мере двух наборов массивов спектрального распределения виброскорости,
f) вычисляют результирующий вектор виброскорости и набор значений виброскорости на основе результирующего набора спектров виброскорости,
g) передают вычисленные на эатпе (f) значения на внешнее устройство.
[39] В другом частном примере осуществления способа активация датчика виброскорости осуществляется на основе заранее заданного временного периода активации.
[40] В другом частном примере осуществления способа после передачи вычисленных значений на внешнее устройство датчик виброскорости отключается.
[41] В другом частном примере осуществления способа первый и второй набор массивов мгновенных значений виброскорости, содержат по меньшей мере три массива значений виброскорости по взаимно ортогональным осям.
[42] В другом частном примере осуществления способа первый и второй набор массивов спектрального распределения виброскорости, содержат по меньшей мере три массива спектрального распределения виброскорости по взаимно ортогональным осям.
[43] В другом частном примере осуществления способа результирующий набор спектров виброскорости содержит по меньшей мере три результирующих спектра виброскорости по взаимно ортогональным осям.
[44] В другом частном примере осуществления способа набор значений виброскорости содержит по меньшей мере три значения виброскорости по взаимно ортогональным осям.
[45] В другом частном примере осуществления способа результирующий набор спектров виброскорости формируется на основе умножения значений первого из по меньшей мере двух наборов массивов спектрального распределения виброскорости на комплексно-сопряженные значения второго из по меньшей мере двух наборов массивов спектрального распределения виброскорости.
[46] В другом частном примере осуществления способа контроль уровня вибрации объекта производится в области инфранизких и низких частот в диапазоне от 2 Гц до 1000 Гц с динамическим диапазоном от 0,01 до 50 мм/с.
[47] В другом частном примере осуществления способа передача данных на внешнее устройство выполняется по интерфейсу, выбираемому из группы: RS485, UART, RS422, SPI, I2C.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[48] Признаки и преимущества настоящего технического решения станут очевидными из приводимого ниже подробного описания и прилагаемых чертежей, на которых:
[49] Фиг. 1 – иллюстрирует пример реализации датчика виброскорости.
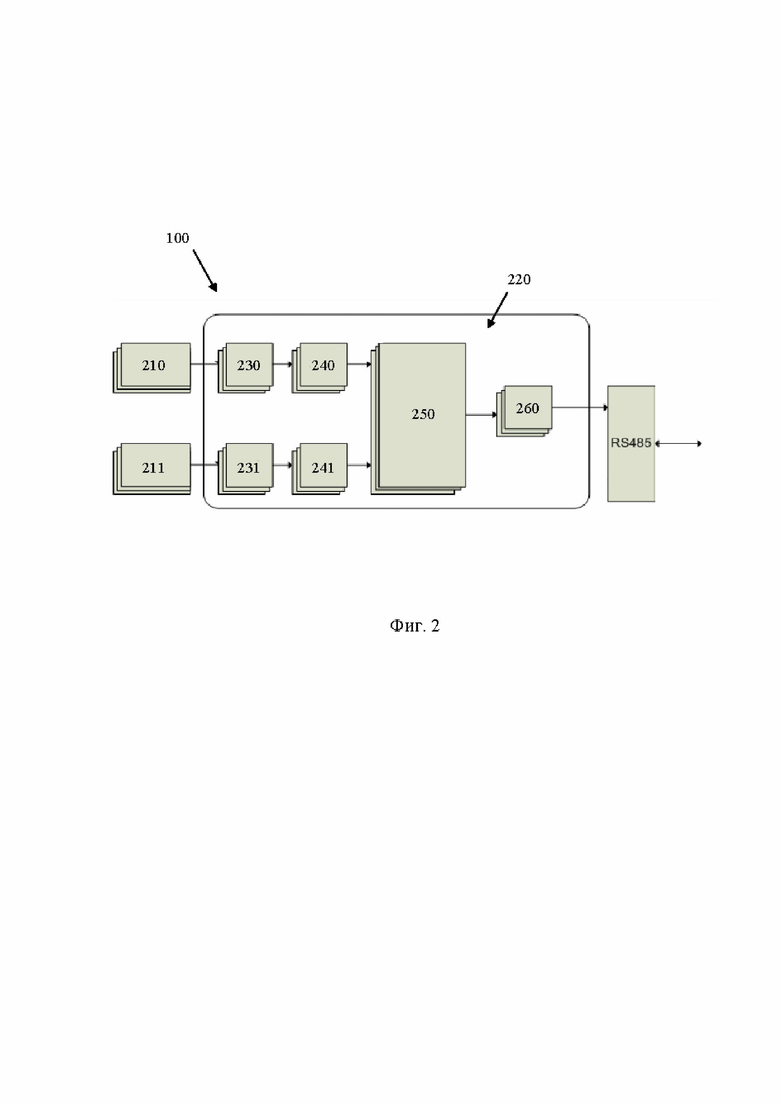
[50] Фиг. 2 – иллюстрирует структурную схему датчика виброскорости.
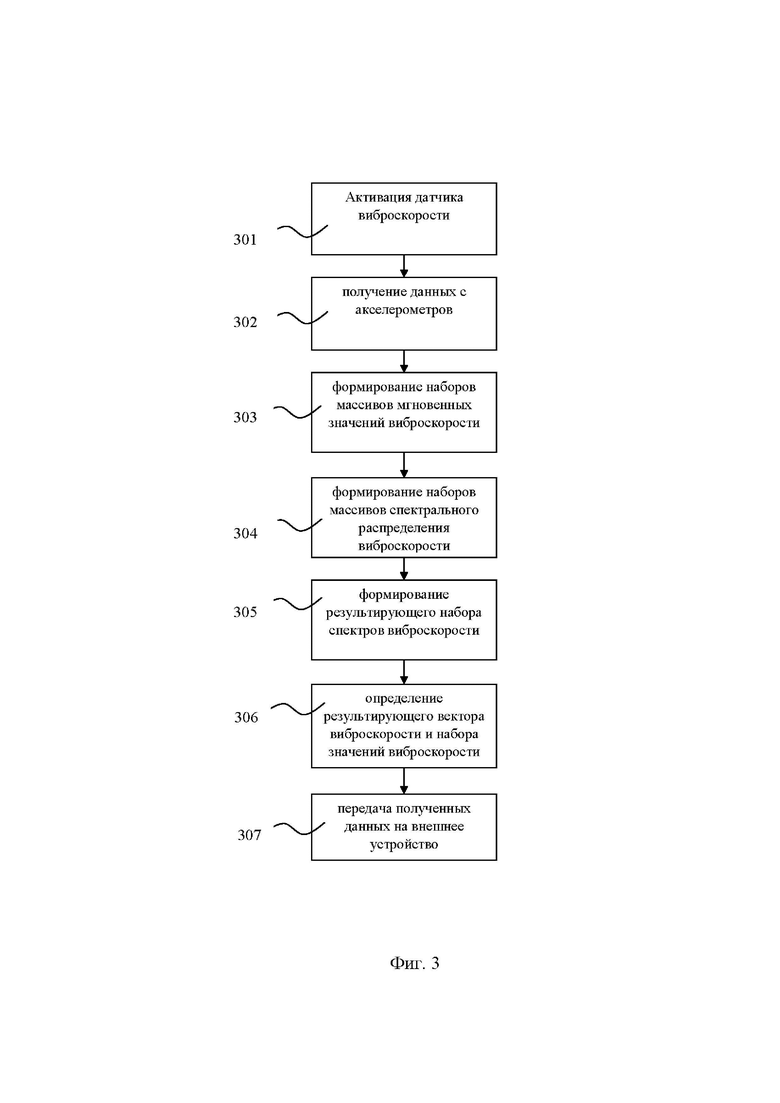
[51] Фиг. 3 – иллюстрирует блок схему выполнения заявленного способа измерения виброскорости для контроля уровня вибраций в области инфранизких и низких частот.
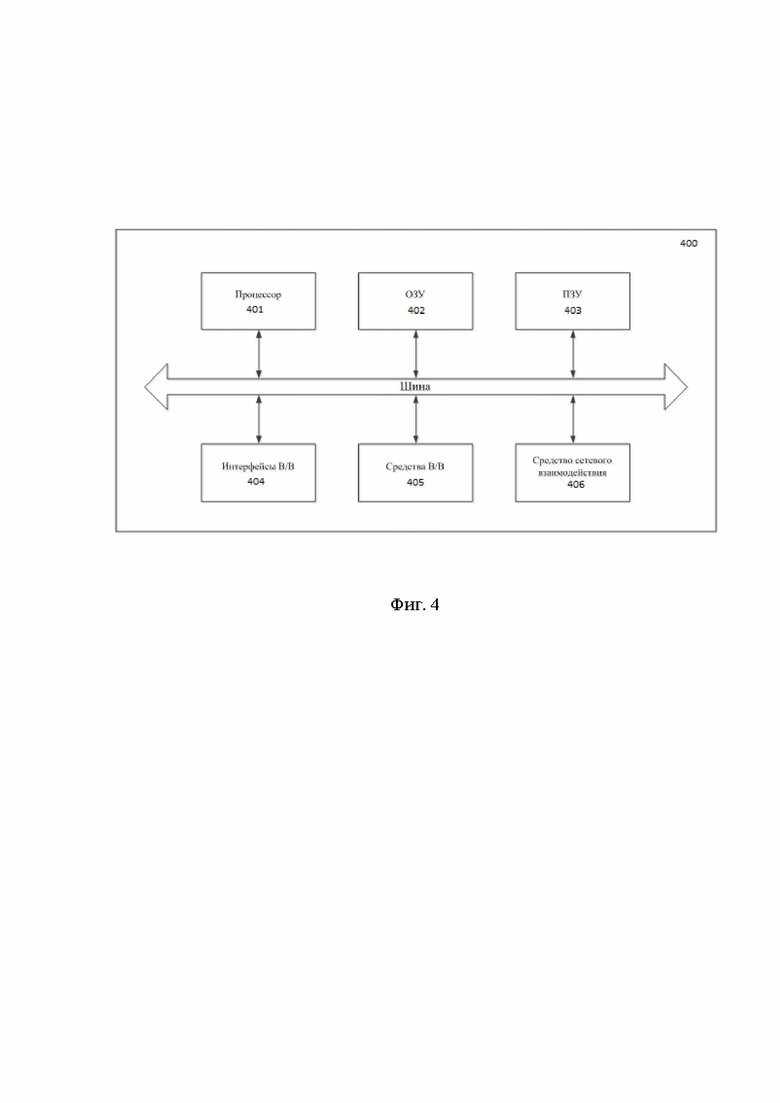
[52] Фиг. 4 – иллюстрирует общий вид вычислительных модулей.
ПОДРОБНОЕ ОПИСАНИЕ
[53] Ниже будут описаны термины и понятия, необходимые для реализации настоящего технического решения.
[54] Датчик - собирательный термин, который может означать: измерительный преобразователь; первичный измерительный преобразователь; чувствительный элемент.
[55] Измерительный преобразователь — техническое средство с нормируемыми метрологическими характеристиками, служащее для преобразования измеряемой величины в другую величину или измерительный сигнал, удобный для обработки, хранения, дальнейших преобразований, индикации или передачи.
[56] Взрывозащищенное электрооборудование – электрооборудование, в котором предусмотрены конструктивные меры по устранению или затруднению возможности воспламенения (при эксплуатации) окружающей его взрывоопасной смеси.
[57] Заявленное техническое решение позволяет измерять значения виброскорости исследуемого объекта в пространстве, по трем взаимно ортогональным осям, в области инфранизких и низких частот и малых амплитудных значений колебаний с высокой точностью за счет компенсации собственных шумов датчика вибрации. Контроль уровня вибрации объекта с помощью заявленного технического решения может производиться в диапазоне частот от 2Гц до 1000Гц (область инфранизких и низких частот) с динамическим диапазоном от 0,01 до 50 мм/с.
[58] Кроме того, указанное решение позволяет использовать датчик вибрации во взрывоопасных средах за счет особенностей реализации, описанных подробнее ниже. Также выполнение указанного датчика на MEMS акселерометрах (микроэлектромеханические акселерометры) позволяет измерять значения виброскорости по трем взаимно-ортогональным осям координат без юстировки конструкции.
[59] На Фиг. 1 приведен пример реализации датчика виброскорости 100. Указанный датчик 100 выполнен во взрывозащитном корпусе 110, содержащем крепление (не показано), предназначенное для установки датчика 100 на исследуемый объект. В частном варианте реализации датчик 100 может дополнительно содержать разъем для подключения внешнего источника питания.
[60] Взрывозащитный корпус 110 может быть выполнен, не ограничиваясь, из низкоуглеродистой стали с полиэфирным покрытием, нержавеющей стали AISI 304, полиэфирного пластика, армированного стекловолокном с углеродным наполнителем, литого алюминия с порошковым покрытием и т.п.
[61] Также, датчик 100 может обладать пылевлагозащищенностью (степень защиты не ниже IP 65). Под степенью защиты понимается способ защиты, проверяемый стандартными методами испытаний, который обеспечивается оболочкой от доступа к опасным частям (опасным токоведущим и опасным механическим частям), попадания внешних твёрдых предметов и/или воды внутрь оболочки. Это достигается, например, за счет покрытия токоведущих элементов схемы лаком и/или покрытия составных частей корпуса 110 слоем резины, который предотвращает попадание внутрь влаги.
[62] В качестве крепления, используемого для установки датчика 100 на исследуемый объект, может использоваться, например, магнитное крепление для металлических поверхностей, крепление на шпильку с резьбой для ровных и гладких поверхностей, винтовое крепление через переходник для неровных и/или окрашенных поверхностей и т.д., не ограничиваясь. Крепление может быть расположено на основании датчика 100. Кроме того, в частных вариантах реализации датчик 100 может устанавливаться на исследуемый объект с помощью клея, такого как эпоксидная смола. Для специалиста в данной области техники, очевидно, что в качестве крепления может использоваться любой тип креплений, предназначенный для установки датчика 100 на исследуемый объект.
[63] Под исследуемым объектом в данном решении следует понимать любое оборудование и технические системы или установки, вызывающие возникновение вибрации. Так, например, исследуемый объект (или объект) может представлять собой вентилятор газоочистки, компрессор, мотор, буровую установку, железнодорожные рельсы и т.д., не ограничиваясь.
[64] Датчик 100 предназначен для измерения значений виброскорости на исследуемом оборудовании. Более подробный принцип работы указанного датчика 100 и подробная структурная схема приведены на Фиг. 2 и раскрыты более подробно ниже.
[65] Выбор измеряемого параметра вибрации (виброскорости) обусловлен стандартами по вибрации и нормативными документами. Так, в качестве нормируемого параметра вибрации для контроля за техническим состоянием объекта большинство стандартов и нормативных документов устанавливают СКЗ виброскорости (среднеквадратичное значение), т.к. указанный параметр дает наиболее точную оценку технического состояния объектов в наиболее распространенном частотном диапазоне источников вибрации. Кроме того, по стандарту ИСО 10816-3 для оценки уровня вибрации также требуется среднеквадратичное значение (СКЗ) виброскорости.
[66] Для специалиста в данной области техники будет очевидно, что при измеренных параметрах виброскорости с легкостью можно получить параметры виброперемещения и виброускорения. Для преобразования виброскорости в виброускорение, измеренные параметры нужно продифференцировать. Для преобразования виброскорости в виброперемещение сигнал нужно проинтегрировать.
[67] На Фиг. 2 приведена структурная схема датчика 100. Указанный датчик 100 содержит взрывозащитный корпус, внутри которого располагается печатная плата, на которой расположены: два микроэлектромеханических трехосевых акселерометра 210 и 211, микроконтроллер 220, содержащий: два интегратора 230 и 231, два модуля спектрального анализа 240 и 241, модуль кросс-корреляции спектра 250, модуль вычисления результирующих значений виброскорости 260.
[68] Элементы заявленного датчика виброскорости 100 фиксируются между собой и несущими элементами конструкции, с помощью широкого спектра сборочных операций, например, свинчивания, сочленения, спайки, склепки и др., в зависимости от наиболее подходящего способа крепления элементов.
[69] Микроконтроллер 220 может являться бортовым вычислителем, контроллером, ЭВМ (электронно-вычислительная машина), ЧПУ (числовое программное управление), ПЛК (программируемый логический контроллер) и любым другим устройством, способным выполнять заданную, чётко определённую последовательность вычислительных операций (действий, инструкций). Микроконтроллер 220 может быть выполнен в виде устройства или модуля, описанного более подробно на фиг. 4. Микроконтроллер 220 выполнен с возможностью одновременного получения и обработки информации от акселерометров 210 и 211. Как указывалось выше, микроконтроллер 220 может содержать набор модулей, которые могут являться логическими или программно-аппаратными модулями, такими как модули 230, 231, 240, 241, 250, 260, выполненными с возможностью формирования наборов массивов мгновенных значений виброскорости на основе информации от акселерометров 210 и 211, формирования наборов массивов спектрального распределения виброскорости, формирования результирующего набора спектров виброскорости на основе наборов массивов спектрального распределения виброскорости, вычисления результирующего вектора виброскорости и набора значений виброскорости на основе результирующего набора спектров виброскорости.
[70] Термин «инструкции», используемый в этой заявке, может относиться, в общем, к командам в программе, которые написаны для осуществления конкретной функции, такой как прием данных от акселерометров 210 и 211, обработка полученных данных (интегрирование, быстрое преобразование Фурье и т.д.), преобразование данных. Инструкции могут быть осуществлены множеством способов, включающих в себя, например, объектно-ориентированные методы. Например, инструкции могут быть реализованы, посредством языка программирования C++, Java, различных библиотек (например, “MFC”; Microsoft Foundation Classes) и т.д. Инструкции, осуществляющие процессы, описанные в этом решении, могут передаваться как по проводным, так и по беспроводным линиям передачи.
[71] Акселерометры 210 и 211 могут являться микроэлектромеханическими трехосевыми акселерометрами (MEMS акселерометры) и предназначены для формирования массивов мгновенных значений ускорения и преобразования полученных значений в электрический сигнал. Указанные акселерометры 210 и 211 имеют в своем составе сразу три измерительные оси, направленные перпендикулярно друг к другу, что позволяет измерять ускорение тела в любом направлении. Таким образом, при измерении мгновенных значений ускорения, каждый из указанных акселерометров 210 и 211 формирует массив мгновенных значений ускорения по каждой из осей. Указанные операции могут происходить параллельно. Стоит также отметить, что для преобразования измеренных значений ускорения, акселерометры 210 и 211 также могут содержать аналого-цифровой преобразователь (АЦП).
[72] В частном варианте реализации могут использоваться емкостные МЭМС акселерометры, основанные на измерительной ячейке, представляющей собой корпус из кремния, внутри которого размещена консоль с подвешенной инертной массой. На внутренние поверхности корпуса и поверхности массы нанесены электроды, что превращает конструкцию в систему из двух конденсаторов. Под действием ускорения инертная масса колеблется на консоли, что приводит к изменению расстояния между обкладками обоих конденсаторов и, как следствие, изменению их емкости. При этом суммарная емкость составного конденсатора остается неизменной. Вариация емкости конденсаторов отражается изменением потенциалов на их обкладках, что, собственно, и может быть измерено, как сигнал пропорциональный приложенному ускорению. В свою очередь, трехосевой МЭМС акселерометр использует для каждой оси отдельную пробную массу, которая смещается при возникновении ускорения вдоль данной оси (фиксируются емкостными датчиками). В другом частом варианте реализации может быть использован многоосный акселерометр, построенный на описанных выше принципах и отличающийся принципом изготовления инертной массы, позволяющей колебаться сразу в нескольких плоскостях.
[73] Для специалиста в данной области техники будет очевидно, что в качестве трехосевых микроэлектромеханических акселерометров может быть использован любой тип конструкции микроэлектромеханического акселерометра, обеспечивающий измерение мгновенных значений ускорения объекта и их преобразование в электрических сигнал.
[74] В качестве трехосевых микроэлектромеханических акселерометров 210 и 211 могут использоваться, не ограничиваясь, например, трехосевые акселерометры от компании Analog Devices™, такие как ADXL375, трехосевые акселерометры LIS2DW12 от компании STMicroelectronics™ и т.д.
[75] Интеграторы 230 и 231 предназначены для формирования наборов массивов значений виброскорости на основе полученных массивов мгновенных значений ускорения от акселерометров 210 и 211 соответственно. Каждый из указанных интеграторов 230 и 231 формирует независимый набор массивов значений виброскорости как функции от времени на основе полученных мгновенных значений ускорения. Причем, под набором массивов значений виброскорости понимается три массива значений виброскорости по взаимно ортогональным осям в соответствии с измеренными значениями ускорения по указанным осям. Так, если акселерометр 210 подключен к интегратору 230, то указанный интегратор 230 выполнит процесс интегрирования массивов значений (три массива мгновенных значений ускорения по трем соответствующим осям), полученных от акселерометра 210, и соответственно интегратор 231 проведет аналогичный процесс интегрирования для акселерометра 211. Для специалиста, очевидно, что количество интеграторов и схема их подключения к акселерометрам зависит от количества используемых акселерометров. Указанные операции интегрирования могут выполняться одновременно посредством распараллеливания операций интегрирования. Стоит также отметить, что процесс интегрирования широко известен и применяется, в том числе для преобразования значений ускорения в значения скорости. Более подробное описания процессов интегрирования приведено в [1].
[76] Модули спектрального анализа 240 и 241 предназначены для формирования массивов спектрального распределения виброскорости. Указанные модули 240 и 241 выполняют быстрое преобразование Фурье (БПФ) массивов значений виброскорости, полученных от модулей 230 и 231, для формирования массивов спектрального распределения виброскорости. Процессы преобразования Фурье разными модулями могут происходить также параллельно. Так, модуль 240 при получении массива значений виброскорости от модуля 230 может выполнять быстрое преобразование Фурье, в то время как модуль 241 будет выполнять аналогичную операцию с данными, полученными от модуля 231. Быстрое преобразование Фурье — процесс преобразования функции действительной переменной x(t) в её спектр более подробно раскрыто в [2].
[77] Модуль кросс-корреляции спектра 250 предназначен для вычисления результирующего массива спектра виброскорости. Указанный модуль 250 выполнен с возможностью получения массивов спектрального распределения виброскорости от модулей 240 и 241, и умножения значений одного массива на комплексно-сопряженные значения второго массива для получения результирующего массива спектра виброскорости. При этом процесс умножения позволяет уменьшить собственные шумы в области низких и инфранизких частот и малых амплитудных значений, возникающие в акселерометрах 210 и 211 и повысить точность измерения значений виброскорости за счет полученного результирующего массива спектра виброскорости, который нивелирует возникшие в каждом из акселерометров 210 и 211 собственные шумы.
[78] При параллельной работе двух акселерометров 210 и 211 измеренные значения ускорения включают в себя сумму величины собственного шума и величины полезного (измеряемого) сигнала. Поскольку полезный сигнал вызван внешней силой, которая одновременно прикладывается к обоим акселерометрам, то в потоках выходных данных от акселерометров появляются синфазно изменяющиеся составляющие, определяющие степень сходства сигналов (корреляцию). Для количественной оценки степени сходства измерительных сигналов применяется взаимно корреляционная функция (ВКФ), которая может быть рассчитана, например, по следующей формуле:
Bxy(Ʈ) = ∫ x(t)∙y(t-Ʈ)∙dt (1)
где, x(t) – набор мгновенных значений ускорения акселерометра 210,
y(t) – набор мгновенных значений ускорения акселерометра 211,
Ʈ – временной сдвиг функции x относительно y.
[79] При перемножении мгновенных значений x(t) и y(t) величина коррелирующего (полезного) сигнала значительно увеличивается по отношению к хаотичному шуму. Таким образом, в результате вычисления функции Bxy повышается соотношение сигнал/шум. Параметр Ʈ в таком случае выбирается равным 0. Чтобы получить величину виброскорости в определенном диапазоне частот на основе спектральных распределений виброскорости, полученных от модулей 240 и 241, происходит вычисление кросс-коррелированного спектра виброскорости по следующей формуле:
F(Bxy) = (F|x|)* ∙ (F|y|) (2)
где F - преобразование Фурье,
(F|x|)* - комплексно сопряженная функция для x.
[80] Выполнение преобразования Фурье для взаимнокорреляционной функции двух сигналов выполняется на основе произведения их спектральных функций, одна из которых подвергнута комплексному сопряжению. В результате получается распределение спектра взаимной корреляции (кросс-корреляции) исходных сигналов.
[81] Модуль вычисления результирующих значений виброскорости 260 предназначен для вычисления результирующего вектора виброскорости и набора значений виброскорости на основе результирующего набора спектров виброскорости. Указанный модуль 260 выполнен с возможностью получения результирующего спектра виброскорости от модуля 250 и вычисления на его основе среднеквадратичного значения виброскорости (СКЗ). На выходе модуля 260 формируется значение виброскорости по соответствующей оси измерения. Значения виброскорости для осей X, Y, Z используются для вычисления скалярной величины результирующего вектора виброскорости.
[82] Далее, вычисленные значения виброскорости, могут быть использованы для определения аномальной работы исследуемого объекта, определения отклонений уровня вибраций от допустимого уровня вибраций и т.д. Контроль уровня вибраций, как указывалось выше, осуществляется на основе вычисленных значений виброскорости, которые могут быть интерпретированы в соответствующие диагностические показатели для конкретного типа исследуемого объекта.
[83] Вычисленные значения виброскорости по осям далее передаются на внешнее устройство. После чего, цикл измерения значений вибрации завершается.
[84] Таким образом, за счет измерения двух независимых массивов мгновенных значений ускорения одновременно двумя независимыми акселерометрами 210 и 211, а также дальнейшей параллельной обработки измеренных данных, заключающейся в интегрировании и БПФ, и дальнейшем вычислении кросс-коррелированного спектра, повышается точность измерения значений виброскорости в области инфранизких и низких частот и малых амплитудных значений, и уменьшаются собственные шумы, возникающие при измерении первичных мгновенных значений ускорения, что позволяет обеспечивать высокоточный контроль уровня вибраций для исследуемого объекта.
[85] Ниже приведено описание сценария работы датчика 100, которое приведено в качестве примера и не ограничивает варианты реализации указанного датчика.
[86] Сценарий работы датчика 100 начинается с установки указанного датчика на исследуемый объект. Как указывалось выше, в качестве исследуемого объекта может использоваться техническая установка, создающая вибрацию. В зависимости от типа установки выбирается тип крепления датчика 100 к исследуемому объекту. Так, например, для установки датчика на промышленный вентилятор может быть использовано магнитное крепление, расположенное в основании корпуса 110 датчика 100. В другом варианте осуществления заявленного решения в качестве крепления может быть использовано крепление на шпильку с резьбой.
[87] Активация датчика 100 происходит посредством подачи питания на указанный датчик 100. В одном частном варианте осуществления питание на датчик может подаваться от внешнего источника питания, соединенного с датчиком виброскорости 100 через разъем для подключения источника питания. Рабочий диапазон напряжения питания составляет от +2,7В до +3,7В. В качестве источника питания может быть использован, например, литиевый элемент. Источник питания осуществляет фильтрацию входного напряжения питания, защиту от кратковременных "скачков" напряжения и обеспечивает подачу питания на внутренние шины датчика 100. В другом частном варианте осуществления датчик 100 дополнительно может содержать источник питания, оборудованный приемопередатчиком.
[88] При необходимости активации датчика 100, например, как в случае запланированного измерения уровня вибраций объекта, так и измерения уровня вибраций по запросу от внешнего устройства, на датчик 100 подается питание. Стоит отметить, что уровень вибрации представляет собой результаты измерения показателей вибрации, которые создает исследуемый объект и дальнейшего их сравнения с соответствующими допустимыми значениями этих показателей для конкретного типа исследуемого объекта. Измерение параметров вибрации позволяет своевременно выявить отклонение в нормальной работе оборудования, выявить дефекты на ранней стадии и т.д. Так, уровень вибрации объекта может быть определен на основе показателя виброскорости и т.д., не ограничиваясь. Как было описано выше, питание может быть подано от внешнего устройства в соответствии с его периодами активации (как запланированными, так и по запросу).
[89] После подачи питания, микроконтроллер 220 производит инициализацию всех необходимых программных и аппаратных ресурсов, а именно внутренних и периферийных модулей микроконтроллера и трехосевых микроэлектромеханических акселерометров 210 и 211.
[90] Далее микроконтроллер 220 подает управляющий сигнал на запуск цикла измерения в акселерометрах 210 и 211 и получает данные измерений. Цикл измерения мгновенных значений ускорения длится до тех пор, пока не заполнятся массивы первичных данных. Так, например, в частном варианте осуществления цикл измерения длится до тех пор, пока не заполнятся массивы первичных данных, размером по 8192 отсчета каждый. После получения массивов первичных данных от акселерометров 210 и 211 в одном варианте осуществления, микроконтроллер деактивирует указанные акселерометры 210 и 211 для экономии заряда источника питания.
[91] Полученные массивы мгновенных значений ускорения поступают на входы интеграторов 230 и 231. Как указывалось выше, интеграторы 230 и 231 могут являться, не ограничиваясь, программными или программно-аппаратными модулями и располагаются непосредственно на печатной плате и/или в микроконтроллере 220, например, на ПЛИС (программируемая логическая интегральная схема) типа FPGA и т.д. Указанные интеграторы 230 и 231 выполнены с возможностью формирования наборов массивов мгновенных значений виброскорости из полученных массивов первичных значений ускорения. Таким образом, массив значений виброскорости, формируемый каждым из интеграторов 230 и 231, является результатом интегрирования мгновенных значений виброускорения, т.е. получается путем преобразования значений ускорения в скорость, и является массивом мгновенных значений виброскорости.
[92] Поскольку каждый акселерометр 210 и 211 формирует массив первичных значений ускорения по трем осям в декартовой системе координат, то каждый набор массивов мгновенных значений виброскорости также содержит, по меньшей мере, три массива значений виброскорости по взаимно ортогональным осям (по осям X, Y, Z). Как описывалось выше, в зависимости от типа акселерометров 210 и 211 формирование первичного массива мгновенных значений ускорения по каждой оси может происходить с помощью МЭМС акселерометров, изготовленных по планарной (поверхностной) или по объемной технологии. Таким образом, на выходе интеграторов 230 и 231 формируются два набора массивов мгновенных значений виброскорости, каждый из которых содержит по три массива мгновенных значений виброскорости по трем соответствующим осям измерения.
[93] Сформированные наборы массивов мгновенных значений виброскорости далее поступают на входы модулей 240 и 241, которые выполняют быстрое преобразование Фурье для получения наборов массивов спектрального распределения виброскорости. Указанные модули 240 и 241 также могут являться как программными, так и программно-аппаратными модулями и располагаться непосредственно на печатной плате и/или в микроконтроллере 220. Каждый из указанных массивов спектрального распределения виброскорости содержит три массива спектрального распределения виброскорости по трем взаимно ортогональным осям.
[94] Наборы массивов спектрального распределения виброскорости далее поступают на вход модуля кросс-корреляции спектра 250, который обеспечивает формирование результирующего набора спектров виброскорости на основе полученных наборов массивов спектрального распределения виброскорости. Для получения результирующего набора спектров виброскорости умножаются значения первого из двух наборов массивов спектрального распределения виброскорости на комплексно-сопряженные значения второго из двух наборов массивов спектрального распределения виброскорости. Таким образом на выходе модуля 250 формируется результирующий набор спектров виброскорости, который содержит три результирующих спектра виброскорости по взаимно ортогональным осям.
[95] На основе полученного из модуля 250 результирующего набора спектров виброскорости вычисляются результирующий вектор виброскорости и набор значений виброскорости. Указанные вычисления выполняются в модуле вычисления результирующих значений виброскорости 260. Указанный модуль 260 выполнен с возможностью вычисления СКЗ виброскорости для получения значений виброскорости по каждой оси измерения (X, Y, Z), а также для вычисления скалярной величины результирующего вектора виброскорости.
[96] После вычисления скалярной величины результирующего вектора виброскорости и значений виброскорости по каждой оси, указанные данные передаются на внешнее устройство. Передача данных на внешнее устройство может производиться по интерфейсу стандарта RS485. Для специалиста в данной области техники очевидно, что в зависимости от требований, предъявляемых на внешнем устройстве сбора данных, могут быть использованы, не ограничиваясь, также интерфейсы UART, RS422, SPI, I2C и т.д. В одном частном варианте осуществления, датчик 100 дополнительно содержит приемо-передающий модуль, с помощью которого осуществляется передача измеренных данных на внешнее устройство. В качестве внешнего устройства может быть использован персональный компьютер, сервер, смартфон, планшет, носимое умное устройство, маршрутизатор, узел связи и т.д.
[97] В качестве стандарта передачи данных может быть использовано любое средство беспроводной передачи данных, например, GSM модем, GPRS модем, LTE модем, 5G модем, модуль спутниковой связи, NFC модуль, Bluetooth и/или BLE модуль, Wi-Fi модуль и др. Кроме того, датчик 100 дополнительно может содержать средства спутниковой навигации, например, GPS, ГЛОНАСС, BeiDou, Galileo.
[98] Таким образом, за счет формирования двух независимых первичных массивов мгновенных значений ускорения и последующей их обработки и преобразования, а также формирования результирующего набора спектров виброскорости, компенсируются собственные шумы МЭМС акселерометров, что позволяет повысить точность измерения уровня вибраций в области инфранизких и низких частот и в области малых амплитудных значений колебаний в пространстве, где уровень шумов особенно сильный.
[99] На Фиг. 3 представлены этапы способа 300 измерения виброскорости для контроля уровня вибраций в области инфранизких и низких частот. Указанный способ 300 выполняется с помощью датчика виброскорости 100, который был описан выше.
[100] На этапе 301 происходит активация датчика 100. На датчик 100 подается питание от внешнего источника питания через разъем для подключения питания на корпусе 110 датчика 100. В качестве внешнего источника питания может быть использована литиевая батарея. В другом частном варианте осуществления питание подается от внешнего устройства по проводному последовательному интерфейсу, например, RS485 и т.д. не ограничиваясь. Периоды подачи питания на датчик 100 могут быть заданы на внешнем устройстве. Периодом активации датчика 100 может являться запланированный период измерений значений виброскорости исследуемого объекта, установленный на внешнем устройстве посредством человеко-машинного интерфейса взаимодействия. В другом частном варианте осуществления, датчик 100 может быть активирован внешним устройством по запросу пользователя через человеко-машинного интерфейс взаимодействия. Для специалиста в данной области техники, очевидно, что может быть использован любой известный способ подачи питания на датчик 100.
[101] После подачи питания происходит инициализация всех необходимых программных и аппаратных ресурсов, а именно внутренних и периферийных модулей микроконтроллера 220 и трехосевых микроэлектромеханических акселерометров 210 и 211.
[102] На этапе 302 получают данные циклического измерения мгновенного значения ускорения от по меньшей мере двух микроэлектромеханических трехосевых акселерометров 210 и 211. На указанном этапе 302 микроконтроллер 220 активирует акселерометры 210 и 211, которые начинают цикл измерения мгновенных значений ускорения. Указанный цикл длится до тех пор, пока не заполнятся массивы первичных данных. Так, например, в частном варианте осуществления цикл измерения длится до тех пор, пока не заполнятся массивы первичных данных, размером по 8192 отсчета каждый. После получения массивов первичных данных от акселерометров 210 и 211 в одном варианте осуществления микроконтроллер деактивирует указанные акселерометры 210 и 211 для экономии заряда источника питания. Полученные массивы мгновенных значений ускорения передаются в модули 230 и 231 для дальнейшей обработки.
[103] На этапе 303 на основе полученных массивов мгновенных значений виброскорости посредством модулей 230 и 231 формируют, по меньшей мере, два набора массивов мгновенных значений виброскорости. Наборы массивов мгновенных значений виброскорости формируются на основе интегрирования массивов мгновенных значений виброускорения на временном интервале, причем каждый набор массивов значений виброскорости содержит три массива значений виброскорости по взаимно ортогональным осям. Это обусловлено тем, что трехосевые акселерометры 210 и 211 формируют массив мгновенных значений ускорения по трем взаимно ортогональным осям (X, Y, Z) для контроля уровня вибраций в пространстве. Как упоминалось выше, указанный процесс интегрирования каждого из массивов мгновенных значений ускорения может происходить параллельно в каждом из модулей 230 и 231. Интегрированные наборы массивов значений виброскорости далее поступают на модули 240 и 241.
[104] На этапе 304 формируют посредством модулей 240 и 241, по меньшей мере, два набора массивов спектрального распределения виброскорости на основе наборов массивов мгновенных значений виброскорости полученных на этапе 303. Указанные модули выполняют быстрое преобразование Фурье для получения наборов массивов спектрального распределения виброскорости. Модули 240 и 241 также могут являться как программными, так и программно-аппаратными модулями и располагаться непосредственно на печатной плате и/или в микроконтроллере 220. Каждый из указанных массивов спектрального распределения виброскорости также содержит три массива спектрального распределения виброскорости по трем взаимно ортогональным осям. Полученные наборы массивов спектрального распределения виброскорости поступают в модуль 250.
[105] На этапе 305 в модуле 250 формируют результирующий набор спектров виброскорости на основе, по меньшей мере, двух наборов массивов спектрального распределения виброскорости полученных на этапе 304. Для получения результирующего набора спектров виброскорости умножают значения первого из двух наборов массивов спектрального распределения виброскорости на комплексно-сопряженные значения второго из двух наборов массивов спектрального распределения виброскорости. Таким образом, на выходе модуля 250 формируется результирующий набор спектров виброскорости, который содержит три результирующих спектра виброскорости по взаимно ортогональным осям.
[106] На этапе 306 определяют результирующий вектор виброскорости и набор значений виброскорости на основе результирующего набора спектров виброскорости. Необходимые вычисления выполняются в модуле вычисления результирующих значений виброскорости 260. Указанный модуль 260 выполнен с возможностью вычисления СКЗ виброскорости для получения значений виброскорости по каждой оси измерения (X, Y, Z), а также для вычисления скалярной величины результирующего вектора виброскорости. Как упоминалось выше, величина СКЗ характеризует энергию колебаний, что позволяет оценить разрушительное влияние вибрации на исследуемый объект. Стоит также отметить, что набор значений виброскорости, полученный при помощи модуля 260, содержит три значения виброскорости по взаимно ортогональным осям, что позволяет оценить влияние вибрации на исследуемый объект в пространстве.
[107] На этапе 307 вычисленные значения виброскорости по каждой оси и результирующий вектор виброскорости передаются на внешнее устройство для дальнейшей трансляции. Передача данных на внешнее устройство может производиться по интерфейсу стандарта RS485. Для специалиста в данной области техники очевидно, что в зависимости от требований, предъявляемых на внешнем устройстве сбора данных, могут быть использованы, не ограничиваясь, также интерфейсы UART, RS422, SPI, I2C и т.д. В одном частном варианте осуществления, датчик 100 дополнительно содержит приемо-передающий модуль, с помощью которого осуществляется передача измеренных данных на внешнее устройство. В качестве внешнего устройства может быть использован персональный компьютер, сервер, смартфон, планшет, носимое умное устройство, маршрутизатор, узел связи и т.д.
[108] Таким образом, в представленных материалах заявки описаны датчик виброскорости и способ измерения виброскорости для контроля уровня вибраций в области инфранизких и низких частот и области малых амплитудных значений колебаний, обеспечивающие высокую точность измерений за счет уменьшения собственных шумов акселерометров. Также, использование трехосевых МЭМС акселерометров позволяет измерять уровень вибрации в пространстве по трем взаимно ортогональным осям без изменения конструкции акселерометров.
[109] На Фиг. 4 представлен пример общего вида модулей (400), которые обеспечивают реализацию представленного решения. На базе модулей (400) может быть реализован различный спектр вычислительных модулей и микроконтроллеров, например, модуль человеко-машинного взаимодействия, интеграторы, микроконтроллер, модуль кросс корреляции, модули спектрального анализа, модуль вычисления результирующих значений виброскорости, сервер, внешнее устройство и т.д.
[110] В общем виде модуль (400) содержит объединенные общей шиной информационного обмена один или несколько процессоров (401), средства памяти, такие как ОЗУ (702) и ПЗУ (403), интерфейсы ввода/вывода (404), устройства ввода/вывода (405), и устройство для сетевого взаимодействия (406).
[111] Процессор (401) (или несколько процессоров, многоядерный процессор и т.п.) может выбираться из ассортимента устройств, широко применяемых в настоящее время, например, таких производителей, как: Intel™, AMD™, Apple™, Samsung Exynos™, MediaTEK™, Qualcomm Snapdragon™ и т.п. Под процессором или одним из используемых процессоров в модуле (400) также необходимо понимать графический процессор, например, GPU NVIDIA или Graphcore, тип которых также является пригодным для полного или частичного выполнения способа (300), а также может применяться для обучения и применения моделей машинного обучения в различных информационных системах.
[112] ОЗУ (402) представляет собой оперативную память и предназначено для хранения исполняемых процессором (401) машиночитаемых инструкций для выполнения необходимых операций по логической обработке данных. ОЗУ (402), как правило, содержит исполняемые инструкции операционной системы и соответствующих программных компонент (приложения, программные модули и т.п.). При этом, в качестве ОЗУ (402) может выступать доступный объем памяти графической карты или графического процессора.
[113] ПЗУ (403) представляет собой одно или более средств для постоянного хранения данных, например, жесткий диск (HDD), твердотельный накопитель данных (SSD), флэш-память (EEPROM, NAND и т.п.), оптические носители информации (CD-R/RW, DVD-R/RW, BlueRay Disc, MD) и др.
[114] Для организации работы компонентов модуля (400) и организации работы внешних подключаемых устройств применяются различные виды интерфейсов В/В (404). Выбор соответствующих интерфейсов зависит от конкретного исполнения вычислительного устройства, которые могут представлять собой, не ограничиваясь: PCI, AGP, PS/2, IrDa, FireWire, LPT, COM, SATA, IDE, Lightning, USB (2.0, 3.0, 3.1, micro, mini, type C), TRS/Audio jack (2.5, 3.5, 6.35), HDMI, DVI, VGA, Display Port, RJ45, RS232 и т.п.
[115] Для обеспечения взаимодействия пользователя с средством создания панорамного изображения применяются различные средства (405) В/В информации, например, клавиатура, дисплей (монитор), сенсорный дисплей, тач-пад, джойстик, манипулятор мышь, световое перо, стилус, сенсорная панель, трекбол, динамики, микрофон, средства дополненной реальности, оптические сенсоры, планшет, световые индикаторы, проектор, камера, средства биометрической идентификации (сканер сетчатки глаза, сканер отпечатков пальцев, модуль распознавания голоса) и т.п.
[116] Средство сетевого взаимодействия (406) обеспечивает передачу данных посредством внутренней или внешней вычислительной сети, например, Интранет, Интернет, ЛВС и т.п. В качестве одного или более средств (406) может использоваться, но не ограничиваться: Ethernet карта, GSM модем, GPRS модем, LTE модем, 5G модем, модуль спутниковой связи, NFC модуль, Bluetooth и/или BLE модуль, Wi-Fi модуль и др.
[117] Дополнительно могут применяться также средства спутниковой навигации в составе модуля (400), например, GPS, ГЛОНАСС, BeiDou, Galileo.
[118] Конкретный выбор элементов модуля (400) для реализации различных программно-аппаратных архитектурных решений может варьироваться с сохранением обеспечиваемого требуемого функционала от того или иного типа устройства.
[119] Некоторые функции датчика виброскорости также могут быть реализованы на программно-аппаратной части персонального устройства пользователя, которое может являться модулем (400) в виде набора аппаратных или логических модулей, способных выполнять заданную, чётко определённую последовательность вычислительных операций (действий, инструкций), или машиночитаемого носителя, содержащего инструкции, например, программные, для выполнения вышеупомянутых функций.
[120] Представленные материалы заявки раскрывают предпочтительные примеры реализации технического решения и не должны трактоваться как ограничивающие иные частные примеры его воплощения, не выходящие за пределы испрашиваемой правовой охраны, которые являются очевидными для специалистов соответствующей области техники.
Источники информации:
1) В.И. Белоусова, Г.М. Ермакова, М.М. Михалева, Н.В. Чуксина, И.А. Шестакова, «ВЫСШАЯ МАТЕМАТИКА, Часть II», Уральский федеральный университет, 2017.
2) В.П. Кандидов, С.С. Чесноков, С.А. Шленов, «ДИСКРЕТНОЕ ПРЕОБРАЗОВАНИЕ ФУРЬЕ», Физический факультет МГУ, 2019
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ДЛЯ ВЕДЕНИЯ ДИАЛОГОВ С ВИРТУАЛЬНЫМИ ПЕРСОНАЖАМИ В ВИРТУАЛЬНОЙ СРЕДЕ | 2020 |
|
RU2747861C1 |
| СПОСОБ КОНТРОЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ ЛОПАСТЕЙ НЕСУЩЕГО И РУЛЕВОГО ВИНТОВ ВЕРТОЛЕТА | 2016 |
|
RU2628034C1 |
| СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ О ПЕРЕМЕЩЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2436047C1 |
| Система и способ экспресс-диагностирования сетей газопотребления | 2016 |
|
RU2622619C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ВИБРОАКУСТИЧЕСКОГО АНАЛИЗА ПРОМЫШЛЕННОГО ОБОРУДОВАНИЯ, СОДЕРЖАЩЕГО ВРАЩАЮЩИЕСЯ ЧАСТИ | 2021 |
|
RU2783860C2 |
| Устройство мониторинга температуры и вибрации электромашинного оборудования | 2024 |
|
RU2827924C1 |
| ВЫЧИСЛЕНИЕ СКОРОСТИ И ГЛУБИНЫ БУРЕНИЯ ДЛЯ СКВАЖИННЫХ ИНСТРУМЕНТОВ | 2013 |
|
RU2582608C1 |
| Способ спектральной вибродиагностики зарождающихся эксплуатационных дефектов элементов коробок передач транспортных средств | 2023 |
|
RU2834870C2 |
| Способ контроля движений человека и устройство для контроля движений человека | 2019 |
|
RU2794427C1 |
| СПОСОБ РЕКОНСТРУКЦИИ МНОГОПАРАМЕТРИЧЕСКИХ ОБРАЗОВ КОЛЕБАТЕЛЬНЫХ ПРОЦЕССОВ МЕХАНИЧЕСКИХ СИСТЕМ | 2010 |
|
RU2536834C2 |
Использование: изобретение относится к измерительной технике, а более конкретно, к датчику виброскорости MEMS-типа для контроля уровня вибраций объекта в области инфранизких и низких частот и малых амплитудных значений колебаний в пространстве по трем осям декартовых координат. Сущность: датчик виброскорости MEMS-типа для контроля уровня вибраций в области инфранизких и низких частот содержит взрывозащитный корпус, внутри которого установлена печатная плата, на которой расположены по меньшей мере два микроэлектромеханических трехосевых акселерометра, выполненных с возможностью циклического измерения мгновенного значения ускорения по трем взаимно ортогональным осям, микроконтроллер, содержащий по меньшей мере два интегратора, выполненных с возможностью формирования по меньшей мере двух наборов массивов мгновенных значений виброскорости, по меньшей мере два модуля спектрального анализа, выполненных с возможностью формирования по меньшей мере двух наборов массивов спектрального распределения виброскорости, модуль кросс-корреляции спектра, выполненный с возможностью формирования результирующего набора спектров виброскорости, модуль вычисления результирующих значений виброскорости, выполненный с возможностью вычисления результирующего вектора виброскорости и набора значений виброскорости. Также заявлен способ измерения виброскорости с использованием датчика измерения виброскорости. Технический результат: повышение точности уровня вибраций в пространстве в области инфранизких и низких частот и малых амплитудных значений. 2 н. и 30 з.п. ф-лы, 4 ил.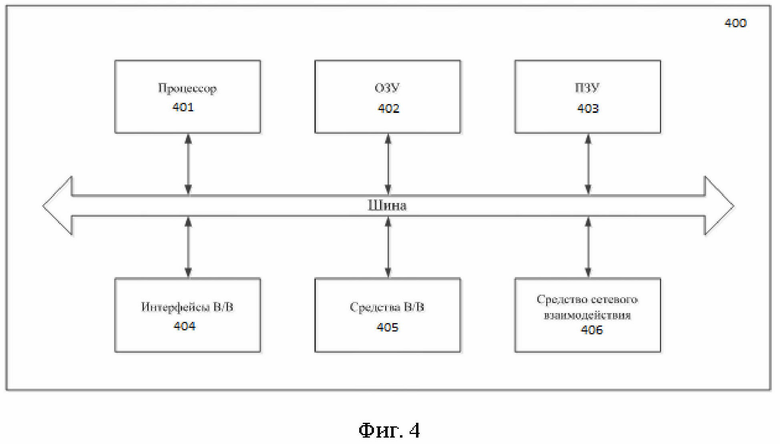
1. Датчик виброскорости (100) для контроля уровня вибраций в области инфранизких и низких частот, включающий корпус, внутри которого установлена печатная плата, на которой расположены:
по меньшей мере два микроэлектромеханических трехосевых акселерометра (210 и 211), выполненных с возможностью циклического измерения мгновенного значения ускорения по трем взаимно ортогональным осям;
микроконтроллер (220), содержащий:
по меньшей мере два интегратора (230 и 231), выполненных с возможностью формирования по меньшей мере двух наборов массивов мгновенных значений виброскорости на основе мгновенных значений ускорения по трем взаимно ортогональным осям, полученных от микроэлектромеханических трехосевых акселерометров (210 и 211);
по меньшей мере два модуля спектрального анализа (240 и 241), выполненных с возможностью формирования по меньшей мере двух наборов массивов спектрального распределения виброскорости на основе наборов массивов мгновенных значений виброскорости;
модуль кросс-корреляции спектра (250), выполненный с возможностью формирования результирующего набора спектров виброскорости на основе по меньшей мере двух наборов массивов спектрального распределения виброскорости;
модуль вычисления результирующих значений виброскорости (260), выполненный с возможностью вычисления результирующего вектора виброскорости и набора значений виброскорости на основе результирующего набора спектров виброскорости.
2. Датчик по п. 1, характеризующийся тем, что на печатной плате дополнительно расположен разъем, предназначенный для подключения источника питания.
3. Датчик по п. 2, характеризующийся тем, что разъем представляет собой проводной последовательный интерфейс.
4. Датчик по п. 2, характеризующийся тем, что проводной последовательный интерфейс представляет собой интерфейс, выбираемый из группы: RS485, UART, RS422, SPI, I2C.
5. Датчик по п. 1, характеризующийся тем, что на печатной плате дополнительно расположен приемо-передающий модуль, выполненный с возможностью обмена данными с внешним устройством.
6. Датчик по п. 1, характеризующийся тем, что по меньшей мере два микроэлектромеханических трехосевых акселерометра представляют собой по меньшей мере акселерометры, выбираемые из группы: емкостные акселерометры, многоосные акселерометры.
7. Датчик по п. 1, характеризующийся тем, что измерение мгновенных значений виброскорости микроэлектромеханическими трехосевыми акселерометрами (210 и 211) по трем взаимно-ортогональным осям координат проводится без юстировки конструкции.
8. Датчик по п. 1, характеризующийся тем, что акселерометры (210 и 211) содержат аналого-цифровой преобразователь (АЦП).
9. Датчик по п. 1, характеризующийся тем, что измеряемые акселерометрами (210 и 211) мгновенные значения ускорения включают в себя сумму величины собственного шума и величины измеряемого сигнала.
10. Датчик по п. 1, характеризующийся тем, что каждый из по меньшей мере двух наборов массивов мгновенных значений виброскорости, сформированных в интеграторах, (230 и 231) содержит по меньшей мере три массива мгновенных значений виброскорости по взаимно ортогональным осям.
11. Датчик по п. 1, характеризующийся тем, что формирование каждого из по меньшей мере двух наборов массивов мгновенных значений виброскорости выполняется параллельно в каждом из интеграторов (230 и 231).
12. Датчик по п.1, характеризующийся тем, что формирование каждого из по меньшей мере двух массивов спектрального распределения виброскорости выполняется параллельно в каждом из модулей спектрального анализа (240 и 241).
13. Датчик по п. 1, характеризующийся тем, что формирование массивов спектрального распределения виброскорости модулями спектрального анализа (240 и 241) выполняется с использованием быстрого преобразования Фурье (БПФ).
14. Датчик по п. 1, характеризующийся тем, что каждый из по меньшей мере двух наборов массивов спектрального распределения виброскорости, сформированных в модулях спектрального анализа (240 и 241), содержит по меньшей мере три массива спектрального распределения виброскорости по взаимно ортогональным осям.
15. Датчик по п. 1, характеризующийся тем, что модуль кросс-корреляции спектров (250) выполнен с возможностью вычисления СКЗ виброскорости.
16. Датчик по п. 1, характеризующийся тем, что результирующий набор спектров виброскорости в модуле кросс-корреляции (250) спектров формируется на основе умножения значений первого из по меньшей мере двух наборов массивов спектрального распределения виброскорости на комплексно-сопряженные значения второго из по меньшей мере двух наборов массивов спектрального распределения виброскорости.
17. Датчик по п. 1, характеризующийся тем, что результирующий набор спектров виброскорости, сформированный в модуле кросс-корреляции спектров (250), содержит по меньшей мере три результирующих спектра виброскорости по взаимно ортогональным осям.
18. Датчик по п. 1, характеризующийся тем, что набор значений виброскорости, рассчитанный в вычислительном модуле (260), содержит по меньшей мере три значения виброскорости по взаимно ортогональным осям.
19. Датчик по п. 1, характеризующийся тем, что корпус датчика выполнен пылевлагозащищенным.
20. Датчик по п. 1, характеризующийся тем, что корпус является взрывозащитным.
21. Датчик по п. 20, характеризующийся тем, что взрывозащитный корпус выполнен из материала, выбираемого из группы: низкоуглеродистая сталь с полиэфирным покрытием, нержавеющая сталь AISI 304, полиэфирный пластик, армированный стекловолокном с углеродным наполнителем, литой алюминий с порошковым покрытием.
22. Датчик по п. 1, характеризующийся тем, что корпус дополнительно содержит магнитное крепление, предназначенное для закрепления датчика на объекте.
23. Способ измерения виброскорости для контроля уровня вибраций в области инфранизких и низких частот, выполняемый с помощью датчика виброскорости (100) по любому из пп. 1-22 и содержащий этапы, на которых:
активируют датчик виброскорости;
получают данные циклического измерения мгновенного значения ускорения от по меньшей мере двух микроэлектромеханических трехосевых акселерометров по трем взаимно ортогональным осям;
формируют по меньшей мере два набора массивов мгновенных значений виброскорости на основе полученных мгновенных значений ускорения по трем взаимно ортогональным осям;
формируют по меньшей мере два набора массивов спектрального распределения виброскорости на основе наборов массивов мгновенных значений виброскорости, сформированных на этапе (с);
формируют результирующий набор спектров виброскорости на основе по меньшей мере двух наборов массивов спектрального распределения виброскорости;
вычисляют результирующий вектор виброскорости и набор значений виброскорости на основе результирующего набора спектров виброскорости;
передают вычисленные на этапе (f) значения на внешнее устройство.
24. Способ по п. 23, характеризующийся тем, что активация датчика виброскорости осуществляется на основе заранее заданного временного периода активации.
25. Способ по п. 23, характеризующийся тем, что после передачи вычисленных значений на внешнее устройство датчик виброскорости отключается.
26. Способ по п. 23, характеризующийся тем, что первый и второй набор массивов мгновенных значений виброскорости содержат по меньшей мере три массива значений виброскорости по взаимно ортогональным осям.
27. Способ по п. 23, характеризующийся тем, что первый и второй набор массивов спектрального распределения виброскорости содержат по меньшей мере три массива спектрального распределения виброскорости по взаимно ортогональным осям.
28. Способ по п. 23, характеризующийся тем, что результирующий набор спектров виброскорости содержит по меньшей мере три результирующих спектра виброскорости по взаимно ортогональным осям.
29. Способ по п. 23, характеризующийся тем, что набор значений виброскорости содержит по меньшей мере три значения виброскорости по взаимно ортогональным осям.
30. Способ по п. 23, характеризующийся тем, что результирующий набор спектров виброскорости формируется на основе умножения значений первого из по меньшей мере двух наборов массивов спектрального распределения виброскорости на комплексно-сопряженные значения второго из по меньшей мере двух наборов массивов спектрального распределения виброскорости.
31. Способ по п. 23, характеризующийся тем, что контроль уровня вибрации объекта производится в области инфранизких и низких частот в диапазоне от 2 Гц до 1000 Гц с динамическим диапазоном от 0,01 до 50 мм/с.
32. Способ по п. 23, характеризующийся тем, что передача данных на внешнее устройство выполняется по интерфейсу, выбираемому из группы: RS485, UART, RS422, SPI, I2C.
| СПОСОБ ПОЛУЧЕНИЯ 1,8-НАФТСУЛЬТОН-З-СУЛЬФОХЛОРИДА | 0 |
|
SU189841A1 |
| СПОСОБ ПОЛУЧЕНИЯ ДИМЕРОВ сс-МЕТИЛСТИРОЛА | 0 |
|
SU191511A1 |
| US 20150331009 A1, 19.11.2015 | |||
| EP 3279621 B1, 05.05.2021 | |||
| US 9750977 B2, 05.09.2017. | |||

