Область техники, к которой относится изобретение
Изобретение относится к устройству для намотки/размотки соединительной линии, выполненной с возможностью транспортировки текучей среды или передачи энергии и/или сигналов.
Уровень техники
Существует множество областей промышленного применения, в которых необходимо передавать энергию и/или сигналы (например, электрический ток, оптические сигналы, механическое напряжение, жидкость и т.д.) через поворотное соединение между первым элементом и вторым элементом, подвижным относительно первого элемента. Например, первым элементом может быть шкаф (распределительный щит), закрепленный на земле, рама робота и т.д., а вторым элементом может быть тележка или портальный кран, перемещающийся по земле, рука робота и т.д.
Вышеупомянутая энергия и/или сигналы передаются по электрическому кабелю, оптическому волокну или пучку оптических волокон, механическому кабелю, гидравлическому или пневматическому трубопроводу или любым другим подходящим средствам, обычно обозначаемым в настоящем тексте как "соединительная линия".
Чтобы предотвратить беспорядочное разворачивание соединительной линии во время перемещения второго элемента по отношению к первому элементу, известно размещение соединительной линии на катушке намоточного устройства, установленного на первом или втором элементе и содержащего приводной блок, выполненный с возможностью приведения катушки во вращение таким образом, чтобы разматывать или наматывать указанную соединительную линию синхронно со смещением второго элемента по отношению к первому элементу. Такое намоточное устройство, например, описано в патентном документе ЕР 3008005.
Намоточное устройство должно быть максимально адаптировано к тем областям применения, для которых оно используется, причем последние весьма разнообразны. В зависимости от соединительной линии, высоты установки, скоростей и ускорений перемещения второго элемента по отношению к первому элементу необходимо адаптировать размеры приводного блока.
Особенностью намоточных устройств является низкая скорость вращения катушки, но необходимость создания значительного крутящего момента.
Существуют различные типы приводных блоков, предназначенных для преодоления этих технических ограничений.
Приводной блок первого типа содержит соединение двигателя посредством электромагнитной муфты, такой как раскрыта, например, в патентных документах FR 2102600, FR 2607333 и FR 2899399. Эта идея допускает определенную модульность идентичных двигателей и муфт, поскольку на одной коробке передач может быть установлено несколько комплектов муфт двигателя для регулировки крутящего момента в соответствии с областью применения.
Приводной блок второго типа содержит соединение двигателя, имеющего регулируемую частоту вращения, и электронного блока управления. Этот тип приводного блока не обладает преимуществами модульности первого типа в том смысле, что двигатель необходимо выбирать с мощностью, необходимой для конкретного применения. Другим типом приводного блока является двигатель с осевым потоком, такой как, например, раскрытый в патентном документе ЕР 3072220.
Раскрытие сущности изобретения
Целью изобретения является разработка нового типа привода для намоточного устройства, позволяющего обеспечить высокий крутящий момент при низкой скорости.
Для этого согласно изобретению предложено устройство для намотки/размотки соединительной линии, выполненной с возможностью транспортировки текучей среды или передачи энергии и/или сигналов, содержащее:
- катушку, выполненную с возможностью приема указанной соединительной линии в намотанном виде,
- полый сквозной вал, выполненный с возможностью прохождения в нем указанной соединительной линии или текучей среды между поворотным шарниром и катушкой, причем указанный полый вал является единым целым с катушкой для приведения указанной катушки во вращение вокруг продольной оси указанного вала,
- по меньшей мере один синхронный двигатель с постоянными магнитами для непосредственной передачи вращения, содержащий статор, несущий обмотки, выполненные с возможностью трехфазного электрического питания, и ротор, несущий постоянные магниты, обращенные к обмоткам статора.
В некоторых вариантах осуществления по меньшей мере один ротор указанного по меньшей мере одного двигателя образован центральным диском катушки.
В других вариантах осуществления по меньшей мере один ротор указанного по меньшей мере одного синхронного двигателя жестко соединен за одно целое с валом. В некоторых вариантах осуществления постоянные магниты размещены по указанному по меньшей мере одному ротору таким образом, что каждый из них имеет грань северного полюса на одной стороне указанного ротора и грань южного полюса на противоположной стороне этого же ротора.
В некоторых вариантах осуществления каждый постоянный магнит имеет трапециевидную форму, причем высота каждого постоянного магнита проходит радиально относительно продольной оси. Особенно предпочтительно, чтобы магниты располагались рядом друг с другом, образуя венец.
В некоторых вариантах осуществления радиальное протяжение венца из магнитов по существу равно высоте обмоток.
В предпочтительном варианте двигатель представляет собой двигатель с осевым потоком.
Кроме того, устройство может включать в себя электронный вариатор скорости, выполненный с возможностью изменения тока питания обмоток статора. Устройство предпочтительно дополнительно содержит поворотный шарнир, соединенный с концом полого вала, противоположным катушке, и управляющую/командную систему, содержащую блок обработки, соединенный или интегрированный с электронным вариатором скорости для управления каждым двигателем в соответствии, в частности, с положением намоточного устройства и рабочей фазой.
Краткое описание чертежей
Другие характеристики и преимущества изобретения будут отражены в нижеследующем подробном описании со ссылкой на прилагаемые чертежи, среди которых:
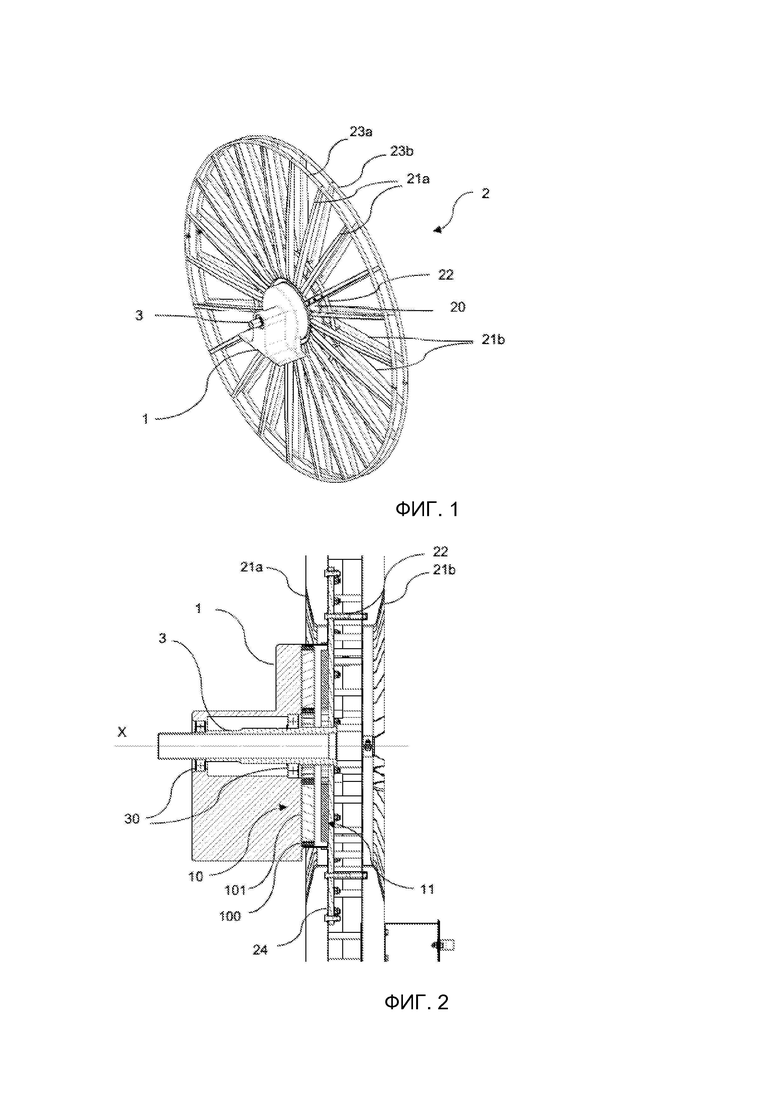
- на фигуре 1 показан общий вид устройства для намотки/размотки в соответствии с одним вариантом осуществления изобретения;
- на фигуре 2 показан вид в поперечном разрезе устройства для намотки/размотки, показанного на фигуре 1;
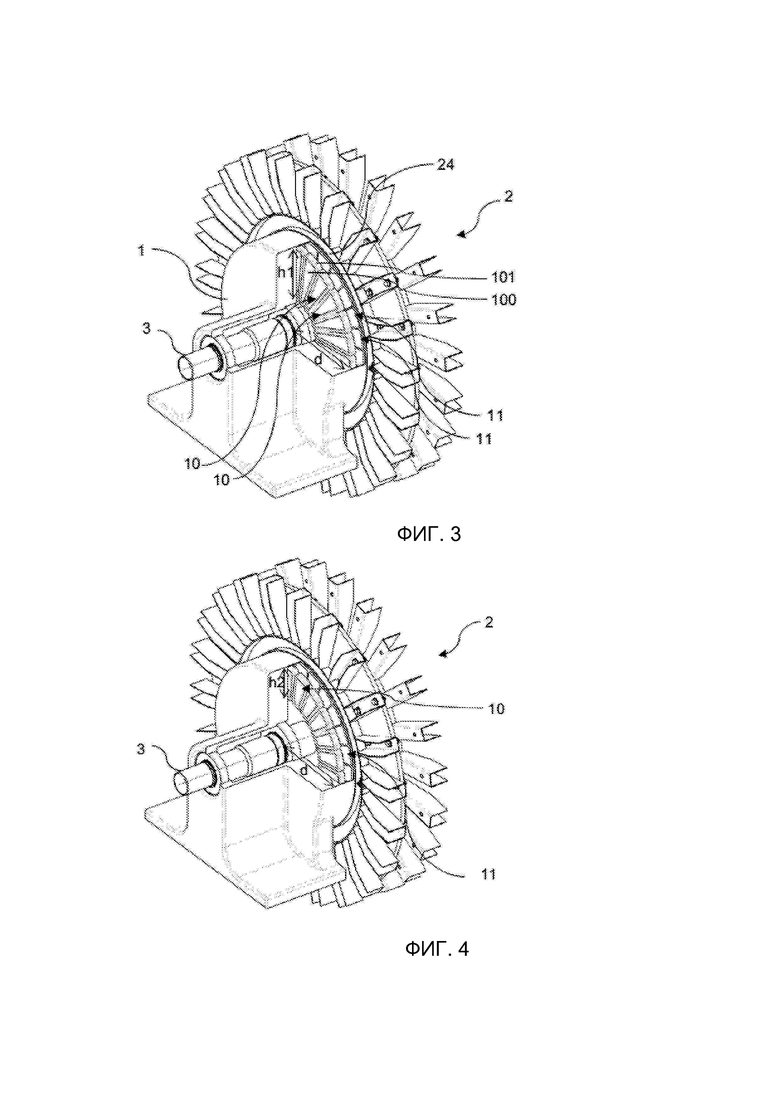
- на фигуре 3 показан вид в аксонометрии устройства для намотки/размотки, показанного на фигуре 1, с частичным поперечным разрезом двигателя в соответствии с первым вариантом осуществления двигателя;
- на фигуре 4 показан вид, аналогичный показанному на фигуре 3, со вторым вариантом осуществления двигателя;
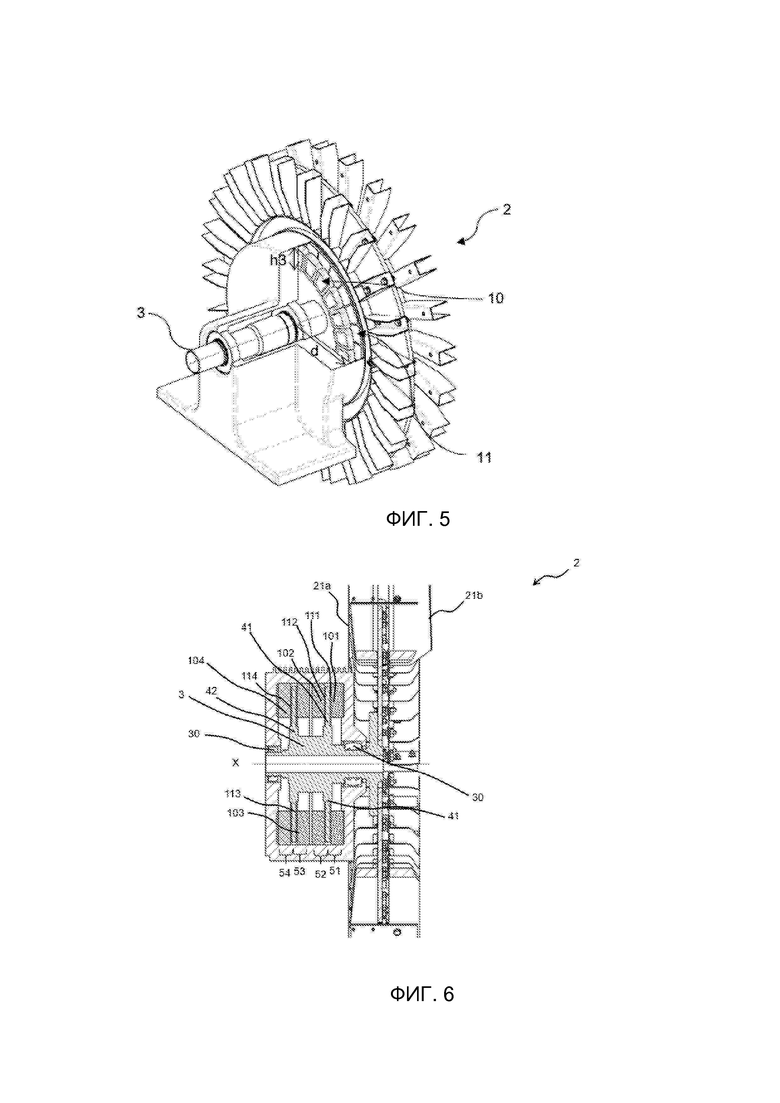
- на фигуре 5 показан вид, аналогичный показанным на фигурах 3 и 4, с третьим вариантом осуществления двигателя;
- на фигуре 6 показан вид в поперечном разрезе устройства для намотки/размотки в соответствии с другим вариантом осуществления изобретения;
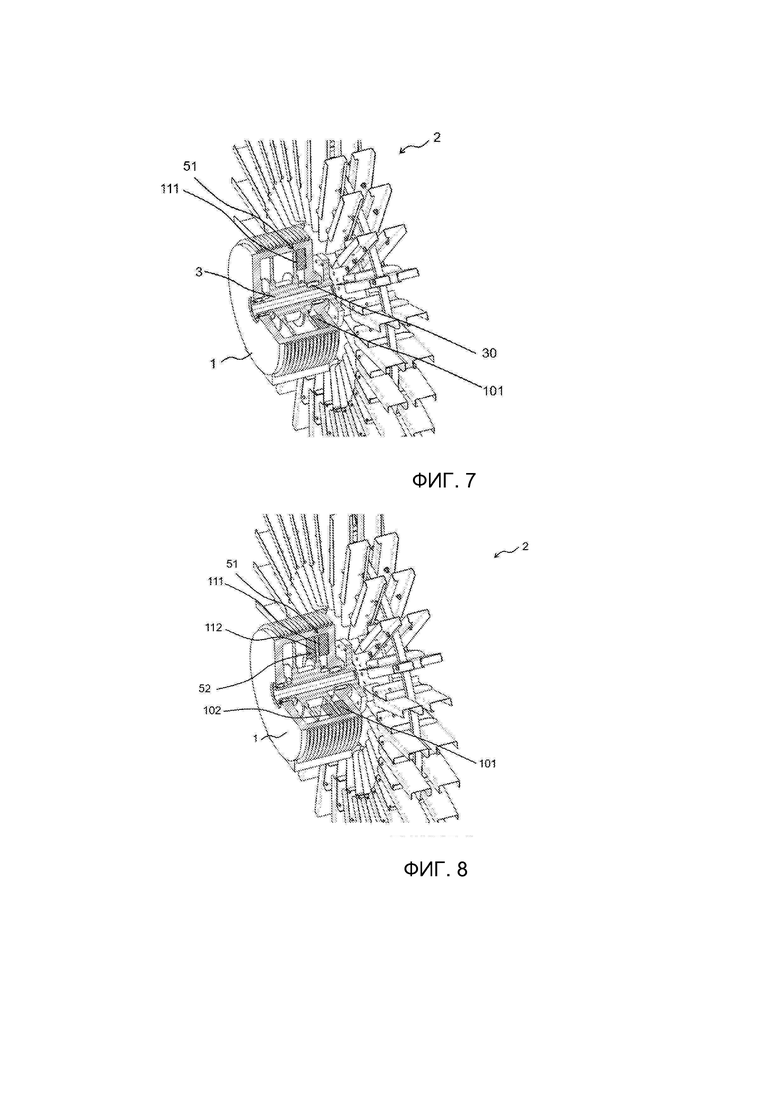
- на фигуре 7 показан вид в аксонометрии устройства для намотки/размотки в соответствии с другим вариантом осуществления изобретения, с частичным поперечным разрезом у статора;
- на фигуре 8 показан вид, аналогичный показанному на фигуре 7, с двумя расположенными рядом друг с другом двигателями;
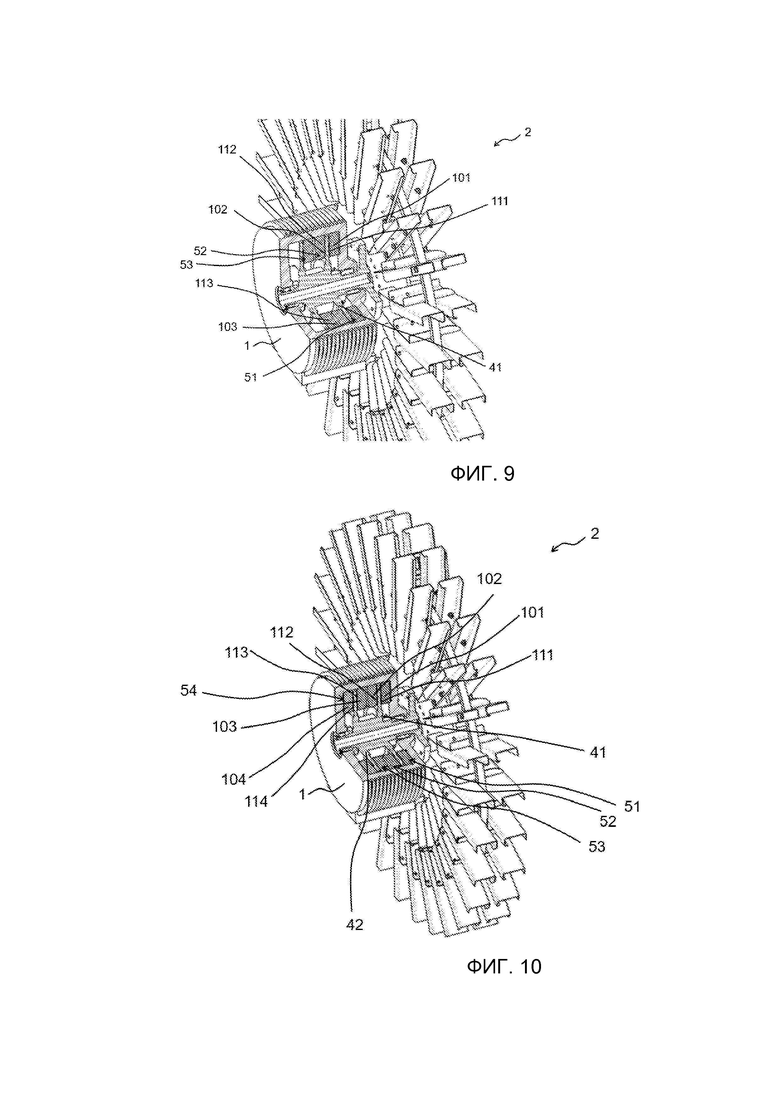
- на фигуре 9 показан вид, аналогичный показанному на фигурах 7 и 8, с тремя расположенными рядом друг с другом двигателями;
- на фигуре 10 показан вид, аналогичный показанному на фигурах 7-9, с четырьмя расположенными рядом друге другом двигателями.
Были показаны только элементы, необходимые для описания намоточного устройства. Ссылочные обозначения, идентичные на разных фигурах, обозначают элементы, которые идентичны или выполняют одну и ту же функцию, и поэтому не обязательно будут подробно описаны повторно.
Осуществление изобретения
На фигуре 1 показан общий вид устройства для намотки/размотки соединительной линии в соответствии с одним вариантом осуществления изобретения.
Соединительная линия может представлять собой электрический кабель, оптическое волокно или пучок оптических волокон, механический кабель, гидравлический или пневматический трубопровод или любое другое подходящее средство для передачи энергии и/или сигналов.
По соображениям удобочитаемости фигур поворотный шарнир, управляющее/командное устройство и элементы, соединяемые посредством соединительной линии, показаны не были.
Одним из этих элементов может быть, в частности, но не ограничиваясь этим, шкаф, закрепленный на земле, или рама робота.
Другим из этих элементов может быть, в частности, но не ограничиваясь этим: тележка или портальный кран, перемещающийся по земле, или рука робота.
Устройство для намотки/размотки (также называемое "намоточным устройством" в остальной части текста) содержит опору, выполненную с возможностью жесткого соединения за одно целое с одним из элементов.
Намоточное устройство также содержит катушку 2, выполненную с возможностью приема соединительной линии в намотанном виде.
Катушка содержит:
- гильзу 20, проходящую вдоль оси вращения катушки, и
- два набора боковых рычагов 21а, 21b, определяющих намотанный объем соединительной линии, выполненных с возможностью бокового удержания витков указанной соединительной линии и закрепленных с обеих сторон гильзы 20. Каждый набор рычагов образует фланец.
В качестве альтернативы (не показано) фланцы катушки могут быть сплошными, при этом каждый набор рычагов заменяется диском эквивалентного диаметра.
Конструкция катушки укреплена обручами, которые могут быть неотъемлемой частью гильзы или фланцев, а именно:
- внутренним обручем 22, расположенным на первом расстоянии от гильзы, и
- парой наружных обручей 23а, 23b, причем каждый обруч прикреплен по меньшей мере к одному рычагу соответствующего фланца на втором расстоянии от гильзы, большем, чем первое расстояние.
Катушка содержит опорную поверхность, выполненную с возможностью приема витков соединительной линии, при этом внутренний виток находится в контакте с указанной опорной поверхностью. Указанная опорная поверхность может, в частности, быть частью гильзы или внутреннего обруча.
Межфланцевый зазор, т.е. расстояние между двумя фланцами, определяется в соответствии с шириной соединительной линии, наматываемой на катушку. Чтобы обеспечить правильную намотку/размотку соединительной линии, в частности, в случае однооборотной катушки, межфланцевый зазор регулируют таким образом, чтобы расстояния между фланцами соответствовали соединительной линии, намотанной на проксимальный и дистальный концы рычагов.
Межфланцевый зазор и длина рычагов, которые определяют вместимость катушки, выбирают в соответствии с максимальной длиной соединительной линии, которая может быть намотана на катушку. В зависимости от области применения наружный диаметр катушки обычно может составлять от 3 до 8 м.
Катушка 2 жестко соединена за одно целое с концом вала 3, который установлен с возможностью вращения относительно опоры с помощью подшипников 30.
Как лучше видно на фигуре 2, вал 3 выполнен полым таким образом, чтобы обеспечить прохождение соединительной линии между катушкой 2 и поворотным шарниром (не показан), который расположен на стороне вала, противоположной катушке. Таким образом, соединительная линия защищена в отношении элементов, окружающих намоточное устройство, и не рискует быть поврежденной последними.
В случае, когда соединительная линия транспортирует текучую среду, сам полый вал может образовывать канал для текучей среды, при этом на концах вала предусмотрены соединения с соединительной линией.
Конец полого вала, противоположный катушке, соединен с полым валом поворотного шарнира (не показан), соосного с полым валом 3.
Вал и катушка приводятся во вращение вокруг продольной оси X вала 3 по меньшей мере одним синхронным двигателем с постоянными магнитами для непосредственной передачи вращения. Этот тип двигателя также называется "двигателем для непосредственной передачи вращения".
Указанный по меньшей мере один двигатель содержит статор 1, жестко соединенный за одно целое с опорой. На фигурах статор 1 выполнен из детали, выполненной за одно целое с опорой, но он может быть выполнен из отдельной детали, жестко соединенной с опорой.
Согласно предпочтительному варианту осуществления, статор 1 поддерживает множество обмоток 10 с трехфазным питанием, расположенных вокруг оси X для создания магнитного поля вдоль оси X, полярность которого меняется в соответствии с направлением тока, проходящего через обмотки. Более точно, статор 1 содержит множество листов 100 магнитной стали, отделенных друг от друга радиальными выемками, причем каждая обмотка состоит из набора 101 витков электропроводящих проводов, вставленных в указанные выемки.
Двигатель также содержит ротор, выполненный с возможностью приведения во вращение относительно статора 1. Ротор поддерживает множество постоянных магнитов 11.
Витки обмоток 10 расположены по существу в радиальном направлении таким образом, чтобы создавать осевое магнитное поле, обращенное к постоянным магнитам 11 ротора.
В некоторых вариантах осуществления, раскрытых со ссылкой на фигуры 2-5, ротор выполнен в виде диска 24 за одно целое с катушкой, на которой закреплены постоянные магниты. Предпочтительно, указанный диск может совпадать с гильзой 20.
Для оптимизации поверхности, покрытой магнитами, магниты преимущественно имеют по существу трапециевидную форму с высотой, ориентированной радиально относительно оси X, при этом более узкое основание расположено ближе к оси X, чем более широкое основание. Основания магнитов могут быть прямыми или изогнутыми. Таким образом, постоянные магниты могут быть расположены рядом друг с другом с образованием венца, соосного с осью X и обращенного к обмоткам. Таким образом, как показано на фигурах 3-5, статор 1 содержит обмотки 10 разной высоты, а ротор содержит трапециевидные постоянные магниты 11, расположенные венцом, ширина которого, соответствующая высоте магнитов, предпочтительно меньше или равна высоте обмоток (высота обмотки измеряется в радиальном направлении относительно оси X).
В других вариантах осуществления, в соответствии с фигурами 6-10, ротор 41, 42 содержит диск, на поверхности которого закреплены постоянные магниты 11, причем указанный диск не является частью катушки 2, а жестко соединен за одно целое с полым валом 3. В частности, ротор может быть выполнен из детали, выполненной за одно целое с полым валом, или может быть жестко прикреплен к последнему, например, с помощью канавок, штифтов или любых других крепежных средств. Статор 1 установлен вокруг ротора 41, 42 и полого вала 3 с помощью подшипников 30, которые обеспечивают вращение полого вала и ротора 41, 42 относительно статора 1. Статор 1 содержит поверхность, обращенную к поверхности ротора, несущей постоянные магниты, причем указанная поверхность поддерживает множество обмоток 101-104 с трехфазным питанием, расположенных вокруг оси X для создания магнитного поля вдоль оси X, полярность которого меняется в соответствии с направлением тока, проходящего через обмотки.
Более точно, статор 1 содержит множество листов электротехнической стали, отделенных друг от друга радиальными выемками, причем каждая обмотка 101-104 состоит из набора витков электропроводящих проводов, вставленных в указанные выемки.
Особенно выгодно, что такое расположение ротора и статора позволяет размещать несколько двигателей рядом друг с другом вдоль оси X, причем каждый двигатель соединяет поверхность ротора, несущую постоянные магниты, и поверхность статора, обращенную к обмоткам и поддерживающую их. Таким образом, каждый ротор может быть общим для двух соседних двигателей, причем первая поверхность несет постоянные магниты, принадлежащие первому двигателю, а вторая поверхность, противоположная первой, также несет постоянные магниты, принадлежащие второму двигателю. В соответствии с этим принципом могут быть добавлены другие роторы, каждый из которых в сочетании с соответствующими поверхностями статора обеспечивает работу двух дополнительных двигателей.
Таким образом, на фигуре 6 показан вариант осуществления с четырьмя двигателями 51-54, содержащими два ротора 41, 42, поддерживающих постоянные магниты 111-114 на своих двух поверхностях, причем каждая поверхность ротора обращена к соответствующей поверхности статора, содержащего обмотки 101-104.
Архитектура, показанная на фигуре 6, позволяет варьировать количество двигателей от 1 до 4 в соответствии с количеством поверхностей роторов 41, 42, которые снабжены постоянными магнитами, и соответствующими поверхностями статора, которые снабжены обмотками. Естественно, могут быть добавлены дополнительные двигатели путем обеспечения одного или более дополнительных роторов, соосных с роторами 41, 42, и соответствующих дополнительных поверхностей статора.
На фигуре 7 показан вариант осуществления, включающий в себя ротор 41, содержащий магниты 111 на поверхности, обращенной к поверхности статора 1, содержащей обмотки 101, образующие двигатель 51. Ротор 41 жестко соединен за одно целое с валом 3 и соосен с катушкой.
На фигуре 8 показан вариант осуществления, включающий в себя ротор 41, содержащий магниты 111 на поверхности, обращенной к поверхности статора 1, содержащей обмотки 101, образующие двигатель 51, и магниты 112 на противоположной поверхности ротора 41, обращенной ко второй поверхности статора 1, содержащей обмотки 102, образующие второй двигатель 52.
Магниты могут быть, например, приклеены к поверхностям ротора 41.
В качестве альтернативы, для двух смежных двигателей можно использовать один набор магнитов. В этом случае магниты расположены в роторе 41 таким образом, чтобы магнит имел грань северного полюса на первой стороне ротора 41 и грань южного полюса на другой стороне того же ротора 41, и чтобы соседний магнит имел грань южного полюса на первой стороне ротора 41 и грань северного полюса на другой стороне ротора 41. Другими словами, грани северного и южного полюсов чередуются на каждой стороне ротора 41.
Таким образом, первый двигатель, образованный ротором 41, содержит магниты на венце, имеющие попеременно грань северного полюса и грань южного полюса. На противоположной поверхности того же ротора 41 имеется венец из магнитов, имеющих противоположную полярность. Смещая обмотки статоров, расположенных по обе стороны от ротора, на шаг магнита, создается удвоенный крутящий момент по отношению к венцу из магнитов, используемых с одной стороны.
Таким образом, каждый магнит имеет грань, используемую первым двигателем 51, в то время как его противоположная грань используется вторым двигателем 52. Например, ротор 41 может быть изготовлен из металлического листа, имеющего углубления по форме магнитов, причем магниты 111-114 расположены таким образом, чтобы проходить через ротор 41.
В вариантах осуществления, показанных на фигурах 7 и 8 ротор 42 не используется для образования двигателя и, следовательно, не несет на себе постоянных магнитов. Естественно, можно изъять этот ротор 42, чтобы увеличить компактность устройства.
На фигуре 9 показан вариант осуществления, содержащий двигатели 51 и 52 и второй ротор 42, содержащий магниты 113 на поверхности, обращенной к поверхности статора 1, содержащей обмотки 103, образующие третий двигатель 53.
На фигуре 10 показан вариант осуществления, содержащий двигатели 51 и 52 и второй ротор 42, содержащий магниты 113 на поверхности, обращенной к третьей поверхности статора 1, содержащей обмотки 103, образующие третий двигатель 53, и магниты 114 на его противоположной поверхности, обращенной к четвертой поверхности статора 1, содержащей обмотки 104, образующие четвертый двигатель 54.
Альтернативно, двигатели 53 и 54 могут быть образованы одним и тем же набором магнитов, размещенных по ротору 42 таким образом, чтобы каждый из них имел грань северного полюса на одной стороне ротора 42 и грань южного полюса на другой стороне того же ротора 42, за счет чередования граней северного и южного полюсов соседних магнитов на каждой стороне ротора.
Количество роторов указано исключительно в целях иллюстрации и не является ограничивающим, специалисты в данной области поймут, как адаптировать указанное количество в соответствии с параметрами намоточного устройства и требуемым крутящим моментом.
В вариантах осуществления, содержащих один или более роторов 41-42, несущих постоянные магниты 111-114, постоянные магниты 111-114 преимущественно имеют по существу трапециевидную форму с высотой, ориентированной радиально относительно оси X, причем более узкое основание расположено ближе к оси X, чем более широкое основание. Основания магнитов могут быть прямыми или изогнутыми. Таким образом, постоянные магниты могут быть расположены рядом друг с другом с образованием венца, соосного с осью X и обращенного к обмоткам.
Каждый двигатель управляется электронным вариатором скорости (не показан), выполненным с возможностью изменения напряжения, частоты и тока питания обмоток статора 1. Указанные обмотки создают магнитное поле, вращающееся со скоростью, пропорциональной частоте питания, генерируя вращение ротора или роторов, постоянные магниты которых создают магнитное поле. Преимущественно, током, питающим обмотки, можно управлять таким образом, чтобы изменять магнитное поле и, следовательно, адаптировать крутящий момент, создаваемый двигателем.
Электронный вариатор скорости является частью управляющей/командной системы намоточного устройства, который также содержит блок обработки, соединенный или интегрированный с вариатором для управления двигателем, в частности, в соответствии с положением намоточного устройства и рабочей фазой.
Указанная система управления/командования дополнительно содержит датчики, выполненные с возможностью измерения электрического тока, протекающего через обмотки двигателя.
Блок обработки содержит по меньшей мере один процессор, выполненный с возможностью реализации алгоритмов вычисления с учетом входных данных, подаваемых, в частности, датчиками, и запоминающее устройство, в котором записаны параметры, необходимые для выполнения алгоритмов.
В некоторых вариантах осуществления блок обработки интегрирован непосредственно в вариатор; в других вариантах осуществления блок обработки интегрирован в программируемый логический контроллер, внешний по отношению к вариатору (например, контроллер машины, к которой подсоединено намоточное устройство).
Блок обработки и вариатор могут быть расположены внутри шкафа, расположенного вблизи намоточного устройства.
Преимущество такого двигателя для непосредственной передачи вращения или набора двигателей для непосредственной передачи вращения заключается в том, что это позволяет избежать использования какого-либо передаточного элемента, такого как коробка передач, и, следовательно, устраняет все проблемы, порождаемые такой коробкой передач, такие как, в частности, какие-либо отказы и рабочие зазоры коробки передач, а также потери, к которым она приводит из-за ее выходной мощности.
Более того, в таком двигателе отсутствует контакт между ротором и статором 1. Таким образом, отсутствует механический износ, что обеспечивает превосходную надежность и длительный срок службы.
С другой стороны, такой двигатель или набор двигателей позволяет генерировать крутящие моменты небольшой длительности, которые являются более существенными, чем существующие технологии асинхронных двигателей, что важно для обеспечения возможности уменьшения длительности торможения намоточного устройства в аварийной ситуации (при постоянной мощности двигателя) или для более быстрого прохождения над точкой подачи намоточного устройства, что требует сильного превышения крутящего момента по сравнению с крутящим моментом, генерируемым при обычном использовании, в течение короткого периода времени (обычно менее 5 секунд).
Кроме того, намоточное устройство согласно изобретению выгодно отличается большим размером катушки, позволяющим размещать большое количество постоянных магнитов и размещать указанные магниты на значительном расстоянии от оси X, чтобы обеспечить желаемый крутящий момент.
Например, обычно имеется отверстие диаметром около 1,5 м для размещения магнитов. Скорость вращения катушки обычно составляет около 30 об/мин, но в более общем случае может составлять от практически нуля до 100 об/мин. Крутящий момент, создаваемый двигателем, может достигать 8000 Нм.
Как можно видеть на фигурах 3-10, архитектура намоточного устройства согласно изобретению соответствует определенной модульности с точки зрения размера и/или количества обмоток, а также с точки зрения размера постоянных магнитов.
Таким образом, в варианте осуществления, показанном на фигуре 3, статор 1 содержит обмотки 10, имеющие высоту h1, причем верхняя часть обмоток в радиальном направлении находится на расстоянии d от оси X, а высота магнитов 11 по существу равна общей толщине обмотки, при этом магниты расположены обращенными к обмоткам.
В варианте осуществления, показанном на фигуре 4, статор 1 содержит обмотки 10, высота h2 которых меньше, чем h1. Предпочтительно, верхняя часть обмоток в радиальном направлении находится на том же расстоянии d от оси X, что и у обмоток на фигуре 3, причем широкое основание магнитов 11 расположено на том же расстоянии от оси X, что и основания магнитов ротора на фигуре 3, чтобы максимизировать генерируемый крутящий момент.
В варианте осуществления, показанном на фигуре 5, статор 1 содержит обмотки 10, высота h3 которых меньше, чем h2. Предпочтительно, верхняя часть обмоток в радиальном направлении находится на том же расстоянии d от оси X, что и у обмоток на фигурах 3 и 4, причем широкое основание магнитов 11 расположено на том же расстоянии от оси X, что и основания магнитов ротора на фигурах 3 и 4, чтобы максимизировать генерируемый крутящий момент.
Можно регулировать расположение магнитов и обмоток относительно оси X в соответствии с имеющимся пространством и, в частности, размером катушки.
Опционально возможно обеспечить определенную модульность путем формирования каждого магнита в виде двух или более трапециевидных участков, расположенных рядом друг с другом в радиальном направлении, сумма высот которых образует общую высоту магнита.
В зависимости от области применения можно формировать магниты максимальной высоты, используя узел трапециевидных частей, или можно формировать магниты минимальной или промежуточной высоты, используя только часть трапециевидных частей и располагая их в виде венца.
Естественно, показанные варианты осуществления приведены только в целях иллюстрации; специалисты в данной области могут использовать любое другое количество витков для обмотки и, следовательно, определять размер и количество магнитов в соответствии с областью применения, крутящим моментом и требуемой скоростью. Специалисты в данной области могут, кроме того, адаптировать витки для обмотки 101-104 и определить размер и количество магнитов 111-114 таким же образом для варианта осуществления, в котором один или более роторов 41, 42 являются единым целым с валом 3, как показано на фигурах 6-10. Кроме того, в таком варианте осуществления размер и количество витков для обмоток 101-104 и количество магнитов 111-114 могут быть различными или одинаковыми для нескольких двигателей 51-54, образованных роторами и поверхностями статора 1.
Более того, хотя описание было дано в отношении двигателя с осевым потоком, в качестве альтернативы, двигатель может представлять собой двигатель с радиальным потоком. В этом варианте осуществления ротор содержит барабан, объединенный с гильзой 20, несущей постоянные магниты, а статор 1 несет на себе обмотки с трехфазным питанием, ориентирующие поле в радиальном направлении. Магниты могут быть размещены внутри или снаружи обмоток.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ НАМОТКИ/РАЗМОТКИ СОЕДИНИТЕЛЬНОЙ ЛИНИИ | 2021 |
|
RU2831052C1 |
| СПОСОБ НАМОТКИ КАТУШКИ ДВИГАТЕЛЯ-МАХОВИКА | 2024 |
|
RU2833871C1 |
| КОНЦЕВОЙ ДИСК СТАТОРА КОЛЛЕКТОРНОГО ДВИГАТЕЛЯ И КОЛЛЕКТОРНЫЙ ДВИГАТЕЛЬ С ТАКИМ ДИСКОМ | 2006 |
|
RU2390084C2 |
| Электрическая машина (варианты) | 2019 |
|
RU2703992C1 |
| ЭЛЕКТРОДВИГАТЕЛЬ КНБК В ВИДЕ ТРУБЫ В ТРУБЕ | 2012 |
|
RU2616956C2 |
| РОТАЦИОННАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2017 |
|
RU2664505C1 |
| ЭЛЕКТРОНАСОС С ДВИГАТЕЛЕМ НА ПОСТОЯННЫХ МАГНИТАХ | 2012 |
|
RU2533795C2 |
| ЭЛЕКТРОМАГНИТНАЯ МАШИНА ПОСТОЯННОГО ТОКА | 2011 |
|
RU2490773C2 |
| Бесщеточная электрическая машина постоянного тока дискового типа | 1982 |
|
SU1494877A3 |
| ЭЛЕКТРОПРИВОД ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2024 |
|
RU2828907C1 |
Изобретение относится к электротехнике. Технический результат заключается в обеспечении высокого крутящего момента при низкой скорости. Устройство для намотки/размотки соединительной линии, выполненной с возможностью транспортировки текучей среды или передачи энергии и/или сигналов, содержит: катушку (2), выполненную с возможностью приема указанной соединительной линии в намотанном виде; полый сквозной вал (3), выполненный с возможностью прохождения в нем указанной соединительной линии или текучей среды между поворотным шарниром и катушкой, причем указанный полый вал (3) является единым целым с катушкой (2) для приведения указанной катушки во вращение вокруг продольной оси (X) указанного вала; по меньшей мере один синхронный двигатель с постоянными магнитами для непосредственной передачи вращения, содержащий статор, несущий обмотки (10), выполненные с возможностью трехфазного электрического питания, и ротор, несущий постоянные магниты (11), обращенные к обмоткам (10) статора. По меньшей мере один ротор указанного по меньшей мере одного синхронного двигателя образован центральным диском (24) катушки (2) или жестко соединен за одно целое с валом (3). 7 з.п. ф-лы, 10 ил.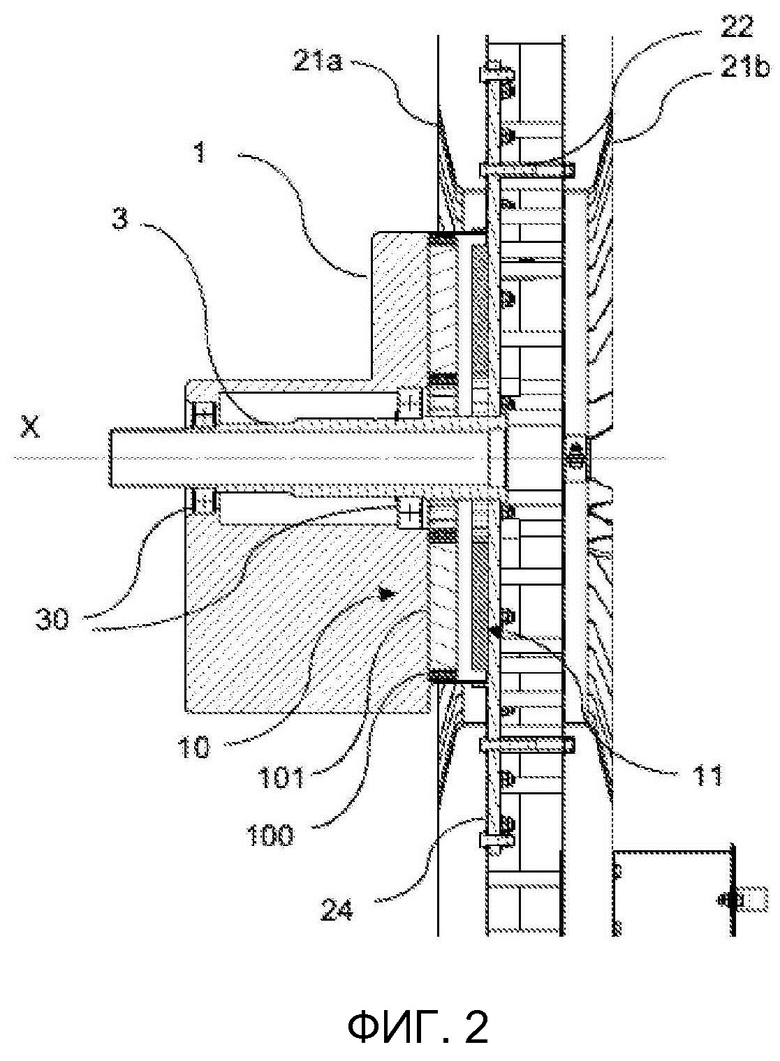
1. Устройство для намотки/размотки соединительной линии, выполненной с возможностью транспортировки текучей среды или передачи энергии и/или сигналов, содержащее:
- катушку (2), выполненную с возможностью приема указанной соединительной линии в намотанном виде,
- полый сквозной вал (3), выполненный с возможностью прохождения в нем указанной соединительной линии или текучей среды между поворотным шарниром и катушкой, причем указанный полый вал (3) является единым целым с катушкой (2) для приведения указанной катушки во вращение вокруг продольной оси (X) указанного вала,
- по меньшей мере один синхронный двигатель с постоянными магнитами для непосредственной передачи вращения, содержащий статор, несущий обмотки (10), выполненные с возможностью трехфазного электрического питания, и ротор, несущий постоянные магниты (11), обращенные к обмоткам (10) статора, при этом по меньшей мере один ротор указанного по меньшей мере одного синхронного двигателя образован центральным диском (24) катушки (2) или жестко соединен за одно целое с валом (3).
2. Устройство по п. 1, в котором по меньшей мере один ротор указанного по меньшей мере одного синхронного двигателя жестко соединен за одно целое с валом (3), при этом постоянные магниты размещены по указанному по меньшей мере одному ротору (41) таким образом, чтобы каждый из них имел грань северного полюса на одной стороне указанного ротора (41, 42) и грань южного полюса на противоположной стороне того же ротора (41, 42), вследствие чего указанные постоянные магниты используются двумя смежными двигателями.
3. Устройство по одному из пп. 1, 2, в котором каждый постоянный магнит (11) имеет трапециевидную форму, причем высота каждого постоянного магнита проходит радиально относительно продольной оси (X).
4. Устройство по п. 3, в котором магниты (11) расположены рядом друг с другом с образованием венца.
5. Устройство по п. 4, в котором радиальное протяжение венца из магнитов (11) по существу равно высоте обмоток (10).
6. Устройство по одному из пп. 1-5, в котором двигатель представляет собой двигатель с осевым потоком.
7. Устройство по одному из пп. 1-6, дополнительно содержащее электронный вариатор скорости, выполненный с возможностью изменения тока питания обмоток статора.
8. Устройство по п. 7, дополнительно содержащее поворотный шарнир, соединенный с концом полого вала (3), противоположным катушке (2), и управляющую/командную систему, содержащую блок обработки, соединенный или интегрированный с электронным вариатором скорости для управления каждым двигателем в соответствии, в частности, с положением намоточного устройства и рабочей фазой.
| EP 3008005 B1, 06.03.2019 | |||
| EP 3072220 B1, 26.02.2020 | |||
| БЕССТУПЕНЧАТЫЙ ЭЛЕКТРОМАШИННЫЙ ГИБРИДНЫЙ ВАРИАТОР С ЦИФРОВЫМ УПРАВЛЕНИЕМ | 2007 |
|
RU2362687C1 |
| Устройство раскладки провода к станкам для намотки электрических катушек | 1983 |
|
SU1157579A1 |
| ТРОИЧНЫЙ К-МОП-С ЛОГИЧЕСКИЙ ЭЛЕМЕНТ "НЕ" | 2011 |
|
RU2481701C2 |
| КОМПОНОВКА БАРАБАНА ГИБКОЙ НАСОСНО-КОМПРЕССОРНОЙ ТРУБЫ ДЛЯ СИСТЕМ С ГИБКОЙ НАСОСНО-КОМПРЕССОРНОЙ ТРУБОЙ | 2012 |
|
RU2597343C2 |
| Электрическая машина (варианты) | 2019 |
|
RU2703992C1 |
| Amin, S., Khan, S., & Hussain Bukhari, S | |||
| S | |||
| Станок для придания концам круглых радиаторных трубок шестигранного сечения | 1924 |
|
SU2019A1 |

