Область техники
Изобретение относится к бессальниковому экранированному электронасосу, в частности, к стойкому к коррозии и бессальниковому экранированному электронасосу, содержащему устройство контроля подшипника. Бессальниковый экранированный электронасос содержит экранированный двигатель и насос, объединенные в одно устройство. Внутренний ротор и обмотки статора электродвигателя защищены стойким к коррозии материалом и находятся в непосредственном контакте с передаваемой текучей средой, являющейся токсичной, огнеопасной и агрессивной, такой как жидкое химическое вещество в устройстве для изготовления печатных плат. В случаях промышленного применения, требующих отсутствия утечек, распространенными являются электродвигатель, в том числе асинхронный электродвигатель (экранированный электронасос с асинхронным двигателем) или насос с двигателем на постоянных магнитах (экранированный электронасос с двигателем на постоянных магнитах). Кроме того, внутренний ротор бессальникового экранированного электронасоса, находящийся в непосредственном контакте с передаваемой текучей средой, содержит подшипник скольжения, изготовленный из керамического материала, такого как графит, окиси алюминия или карбиды кремния. Следует, однако, отметить, что износ подшипника может вызвать внецентренное вращение внутреннего ротора, при котором неподвижный вал должен воспринимать большую центробежную силу и ее момент, приводя к сталкиванию и повреждению внутреннего ротора и защитной оболочки, и при этом возможна утечка текучей среды. Поэтому конструкция системы вала электродвигателя становится одним из основных моментов, на которые следует обратить внимание при разработке. Одним из способов предотвратить утечку с высокой надежностью - это расположить в насосе устройство контроля подшипников.
Таким образом, предлагается экранированный электронасос с двигателем на постоянных магнитах, изготовленный из пластика или содержащий пластиковую облицовку для повышения конструктивной жесткости неподвижного вала, причем в насосе может устанавливаться устройство контроля.
Описание уровня техники
Металлический экранированный электронасос с асинхронным двигателем содержит цилиндрический экран, изготовленный из тонкого листового металла с низкой магнитной проницаемостью и стойкостью к коррозии для герметизации внутреннего ротора и статора. Экран может собираться внутри статора для изоляции текучей среды и обмоток. Еще один лист металла используется для герметизации короткозамкнутого внутреннего ротора, чтобы также изолировать текучую среду. Таким образом, воздушный зазор электродвигателя - это одностороннее радиальное расстояние между зубчатой частью из кремнистой стали статора и зубчатой частью из кремнистой стали внутреннего ротора. Значения ширины воздушного зазора, в основном, менее 3 миллиметров (мм), так что характеристикой вышеупомянутого электродвигателя является конструкция электродвигателя с малым воздушным зазором. Бессальниковый экранированный электронасос, который может использоваться для передачи чистой и неагрессивной текучей среды, такой как автомобильный насос водяного охлаждения, изготовлен из жаропрочной пластмассы с температуростойкостью и ограниченной стойкостью к коррозии, такой как полифенилена сульфид (ПФС), и жаропрочная пластмасса используется для герметизации статора и внутреннего ротора. Толщина односторонней герметизации из жаропрочной пластмассы - более 1,5 мм, а ширина всего воздушного зазора - более 4 мм. То есть, характеристикой этого электродвигателя является конструкция с большим воздушным зазором. Для того чтобы передавать химическую текучую среду с высокой токсичностью и высокой агрессивностью, такую как фтористоводородная (плавиковая) кислота, для герметизации статора и внутреннего ротора приняты стойкий к коррозии пластиковый компонент или облицовка из такого материала, как полипропен (полипропилен) (ПП) или фторполимер. Из-за использования стойкой к коррозии пластмассы конструктивная прочность системы вала электродвигателя становится одним из основных моментов, на которые следует обратить внимание при разработке. Типы системы электродвигателя делятся на вращающийся вал и неподвижный вал. Предлагается предпочтительная система неподвижного вала, толщина односторонней герметизации которой с допуском более 3 мм, а ширина всего воздушного зазора - в основном, более 7 мм, так что характеристикой предлагаемого электродвигателя является конструкция электродвигателя с большим воздушным зазором. Поэтому для насоса с большим воздушным зазором предпочтительным выбором является синхронный двигатель на постоянных магнитах. Хотя бессальниковый экранированный электронасос содержит подшипник скольжения, изготовленный из керамического материала, этот подшипник может выходить из строя из-за износа подшипника, работы без смазки или чрезмерной вибрации. Поэтому для повышения его надежности необходимо размещение устройства контроля, контролирующего износ подшипника. Кроме того, устройство контроля может представлять собой датчик Холла, и при этом экранированный электронасос с двигателем на постоянных магнитах может приводиться в действие как датчиковым, так и бездатчиковым способом. Таким образом, уменьшается зависимость от конкретного привода, и пользователь может иметь более широкий выбор оборудования.
Следующие случаи - это решения проблемы бессальникового экранированного электронасоса, включающие определение конструкции неподвижного вала, бездатчикового привода, датчикового привода и износа подшипника. Содержания этих случаев описываются ниже.
Случай 1
Патент Тайваня номер М369391 «Экранированный электронасос с двигателем на постоянных магнитах», 2009 г. Описан насос, который используется в условиях высокой температуры и коррозии. Конструкция электродвигателя содержит консольную неподвижную конструкцию и внутренний электродвигатель с радиальным воздушным зазором. Толщина герметизации с допуском на коррозию - 3 мм, а общий воздушный зазор - 8 мм. Бездатчиковый способ, раскрытый в этом изобретении, заключается в том, что рассчитывают положение полюса магнита для привода насоса с двигателем на постоянных магнитах, а жесткая композитная неподвижная конструкция отвечает требованиям к эксплуатации при высокой температуре и высокой мощности. Следует, однако, отметить, что предлагаемая конструкция не обладает какой-либо способностью обнаруживать износ подшипника.
Случай 2
Патент Японии номер JP2005344589A «ЭКРАНИРОВАННЫЙ ЭЛЕКТРОНАСОС», в котором предлагается экранированный электронасос с двигателем на постоянных магнитах, используемый в системе охлаждения двигателя. Предлагаемый маломощный насос представляет собой простую конструкцию неподвижного вала. Керамический вал опирается на термостойкие пластиковые компоненты, включая треугольную переднюю опору и защитную оболочку насоса. Во внутреннем пространстве ярма внутреннего ротора главных магнитов установлены вторые магниты и датчики Холла, предназначенные для обнаружения положения полюса магнита для привода насоса с двигателем на постоянных магнитах. Датчик Холла проходит наружу от нижней стороны защитной оболочки. Магниты внутреннего ротора также проходят соответственно аксиально, чтобы уменьшить независимую проходящую длину датчика Холла. Поскольку этим насосом перекачивается только чистая текучая среда, об износе подшипников можно не беспокоиться. Принята простая неподвижная конструкция, но добавление длины магнитов может увеличить себестоимость изготовления, и, кроме того, обнаруживается лишь магнитный поток, рассеивающийся на поверхности магнитов, что является неблагоприятным для обнаружения точного положения полюса магнита.
Случай 3
Патент Японии номер JP 2008220008A «УСТРОЙСТВО БЕСЩЕТОЧНОГО ЭЛЕКТРОДВИГАТЕЛЯ И НАСОСА ДЛЯ ТЕКУЧЕЙ СРЕДЫ», 2008 г., в котором предлагается экранированный электронасос с двигателем на постоянных магнитах, используемый в системе охлаждения двигателя. Предлагаемый маломощный насос представляет собой простую конструкцию неподвижного вала. Керамический вал опирается на термостойкие пластиковые компоненты, включая треугольную переднюю опору и защитную оболочку насоса. На наружной стороне защитной оболочки установлены датчик Холла и его управляющая печатная плата для привода насоса с двигателем на постоянных магнитах. Магнит проходит аксиально так, чтобы задний конец магнита был возле датчика Холла. Кроме того, форма заднего конца магнита выполнена наклонной, чтобы магнитний поток магнита мог проходить в наклонном направлении и через датчик Холла на плате для повышения точности определения положения полюса магнита. Поскольку этим насосом перекачивается только чистая текучая среда, об износе подшипников можно не беспокоиться. Простая неподвижная конструкция является приемлемой, но добавление длины магнитов может увеличить себестоимость изготовления, и, кроме того, обнаруживается лишь магнитный поток, рассеивающийся на поверхности магнитов, что является неблагоприятным для обнаружения точного положения полюса магнита.
Случай 4
Патент США номер US 4211973A «Устройство для обнаружения отказов, которые должны произойти или начинаются при работе вращающейся электрической машины», 1980 г., который относится к экранированному электронасосу с асинхронным двигателем. Пары сигнальных катушек являются достаточно длинными для охвата всей длины ярма статора. Пары сигнальных катушек могут выдавать периодические сигналы напряжения, включая синхронное напряжение индукции с основным магнитным потоком и электродвижущее гармоническое напряжение внутреннего ротора из-за скольжения внутреннего ротора. При износе подшипника размер воздушного зазора слегка меняется, и соответственно изменяется сигнал напряжения, который выдается парами сигнальных катушек. Когда две пары сигнальных катушек находятся в противоположном радиальном направлении зубчатой части статора соответственно, выходное напряжение нейтрализуется противоположным основным магнитным потоком и оставляет периодическое гармоническое напряжение. Если подшипник изношен до такой степени, что вызывает внецентренное вращение внутреннего ротора, периодическое гармоническое напряжение увеличивается, что применимо для случая асинхронного двигателя с аксиальным воздушным зазором и случая асинхронного двигателя с радиальным воздушным зазором. Этот способ может использоваться для обнаружения проблемы мощности электродвигателя или обмотки электродвигателя, такой как проблема небаланса трех фазных обмоток. Но это изобретение используется только для обнаружения износа радиального подшипника асинхронного двигателя - не для обнаружения износа аксиального упорного подшипник.
Случай 5
Патент США номер US 5926001A «Устройство контроля износа подшипника экранированного электродвигателя», 1999 г., который относится к экранированному электронасосу с асинхронным электродвигателем. На внутренней стороне четырех перпендикулярных зубчатых частей на каждом из двух противоположных концов статора выполнены четыре отверстия соответственно, причем четыре из восьми катушек установлены в соответствующих отверстиях на одном конце, а остальные установлены на противоположном конце. Каждое из двух соответствующих отверстий на противоположном конце имеет одинаковый специальный угол, так что восемь катушек могут определять радиальный износ, аксиальный износ и наклонный износ подшипника.
Случай 6
Патент США номер US 5955880A «Устройство контроля положения внутреннего ротора и подшипника бессальникового насоса», 1999 г., который относится к экранированному электронасосу с асинхронным электродвигателем. Две катушки и два ярма с разными полюсами магнита образуют комплект высокочастотных катушек обмоток возбуждения. Две катушки прикреплены на наружной поверхности экрана ярмами параллельно друг другу и в аксиальном положении на наружной стороне каждого конца статора соответственно. Магнитный поток комплекта катушек проходит через экран и входит в наружное пространство двух концов внутреннего ротора. Затем поток возвращается к другому полюсу магнита через магнитный проводящий материал на пластине на двух боковых концах внутреннего ротора вала. Таким образом, образуется замкнутая магнитная цепь, то есть магнитный проводящий материал и комплект катушек являются концентрическими между собой. Катушка содержит трехпроводную обмотку, причем один из проводов используется для возбуждения на высокой частоте двух остальных проводов, чтобы стать двумя сигнальными проводами. Один из сигнальных проводов используется для радиального обнаружения, а другой используется для аксиального обнаружения. В случае аксиального износа на одной стороне подшипника радиальное положение пластины смещается в радиальном направлении, что вызывает приближение пластины к комплекту катушек или удаление от нее. Следовательно, магнитное сопротивление магнитной цепи изменяется, равно как и выходное напряжение магнитной цепи.
Если четыре комплекта катушек, перпендикулярных друг другу, установлены в радиальном положении, может обнаруживаться радиальный износ. Если комплекты катушек и пластины установлены на двух сторонах внутреннего ротора, может обнаруживаться и аксиальное перемещение. При обработке сигналов аксиального обнаружения проводится сравнение двух сигналов напряжения с комплектов катушек на двух сторонах внутреннего ротора для расчета аксиального перемещения внутреннего ротора. Кроме того, высокочастотный сигнал между 1К - 4К может предотвратить помехи гармонического сигнала катушки. Кроме того, для того чтобы уменьшить помехи гармонического сигнала, на заднем конце катушки обмотки статора дополнительно устанавливается устройство блокирования магнитного потока.
Случай 7
Патент США номер US 6114966A «Электродвигатель, имеющий устройство контроля износа подшипника», 2000 г., который относится к экранированному электронасосу с асинхронным двигателем. В описании изобретения к этому патенту указывается, что размещение нескольких пар сигнальных катушек на двух противоположных концах статора позволяет обнаружить радиальный износ подшипника. Однако при ремонте электродвигателя, включающем замену статора, внутреннего ротора, шпинделя или пар сигнальных катушек, пользователь может не выполнить механическое аксиальное позиционирование статора и внутреннего ротора, чтобы обеспечить их электрическое аксиальное позиционирование, или пользователь может не намотать катушку так, чтобы она располагалась в прежнем положении, и при этом она будет выдавать необычный сигнал. То есть, устройство контроля может регулировать относительные положения и обнуление сигнала аксиального износа. Способ заключается в том, что поскольку в собранном состоянии электродвигателя толщина внутреннего ротора больше толщины статора, существует некоторое расстояние между стороной вала со стороны внутреннего ротора и стороной вала со стороны статора. Сторона со стороны внутреннего ротора обращена к центру катушки, выступ внутреннего ротора выступает с заднего конца статора, и при этом задний конец внутреннего ротора полностью закрывает катушку без какого-либо радиального допуска. Таким образом, если упорный подшипник изношен и внутренний ротор перемещается вперед, сигнал катушки на переднем конце изменяется заметно, а сигнал катушки на заднем конце изменяется слегка.
Случай 8:
Патент США номер US 6429781B2 «Устройство обнаружения аксиального износа подшипника для экранированного электронасоса», 2002 г., который относится к экранированному электронасосу с асинхронным двигателем. Устройство содержит комплект катушек, имеющий по две катушки на двух противоположных зубчатых частях статора соответственно и образующий телесный угол 180 градусов. Хотя в описании изобретения к этому патенту четко указывается, что размещение нескольких пар сигнальных катушек на переднем и заднем концах статора позволяет обнаружить аксиальный износ подшипника, осевые длины колец для компенсации износа, установленных на переднем конце и заднем конце электродвигателя, больше осевых длин упорных подшипников, установленных на переднем конце и заднем конце внутреннего ротора. Внутренний ротор может перемещаться между кольцами для компенсации износа примерно на ±2,5 мм в свободном радиальном направлении. Устройство контроля для обнаружения аксиального износа подшипника должно отличать аномальное аксиальное перемещение внутреннего ротора от нормального аксиального перемещения внутреннего ротора. Иными словами, должен обнаруживаться фактический износ подшипника. Изобретение позволяет сравнивать эталонную схему и схему зоны молчания, чтобы обнаружить сигнал катушки для определения, находится ли аксиальное перемещение внутреннего ротора в нормальных пределах.
Случай 9
Патент США номер US 7019661B2 «Детектор аксиального износа подшипника в экранированном электронасосе», 2006 г., который относится к экранированному электронасосу с асинхронным электродвигателем. Способ обнаружения катушек в этом изобретении подобен случаю 8. В описании изобретения к патенту четко указывается, что размещение нескольких пар сигнальных катушек на переднем и заднем концах статора позволяет обнаружить аксиальный износ подшипника и выдать сигнал, и величину износа можно точно обнаружить, когда сигнал обнулен. Однако на величину сигнала напряжения, который выдается парами сигнальных катушек, может влиять рабочее напряжение электродвигателя, вызывающее электромиграцию, тем самым затрудняя обнуление сигнала. Иными словами, величина износа подшипника является неточной. Предлагается способ обработки сигнала, и устройство для его осуществления может непременно обнулять сигнал.
Решения для экранированного электронасоса с асинхронным электродвигателем и экранированного электронасоса с двигателем на постоянных магнитах делятся на три типа, указанных ниже:
1. Устанавливается устройство контроля для обнаружения подшипника для повышения надежности насоса.
2. Устанавливается датчик Холла для удобного привода насоса, но магнит должен быть удлинен.
3. Повышается жесткость неподвижного вала для повышения надежности насоса.
Вышеупомянутые решения их соответствующих проблем могут быть осуществимыми на практике, но в вышеупомянутых случаях не возможны повышение жесткости неподвижного вала и одновременное расположение устройства контроля для повышения надежности. Предлагаемый экранированный электронасос с двигателем на постоянных магнитах должен решить следующие проблемы:
Проблема 1: недостаточная прочность материала.
Повысить конструктивную прочность для предотвращения проблемы, заключающейся в том, что прочность стойкой к коррозии пластиковой конструкции легко снижается при температуре выше 85°С, и надежность насоса повышается без установки устройства контроля.
Проблема 2: требование обнаружения износа подшипника.
Для того чтобы выполнить требования безопасности при передаче высокотоксичной и высокоагрессивной химической текучей среды, устанавливается устройство контроля для непрерывного обнаружения состояния износа подшипника, чтобы повысить надежность насоса.
Проблема 3: требование низкой стоимости для электродвигателя, характеризующегося большим воздушным зазором.
Электродвигатель на постоянных магнитах представляет собой предпочтительный выбор для электродвигателя с большим воздушным зазором, но при этом требуется большое количество дорогостоящих магнитов. Для создания источника сигнала элемента контроля используется увеличение длины главного магнита. Следовательно, стоимость магнитов относительно увеличивается.
Проблема 4: предотвратить гармонические помехи от высокочастотного сигнала с широтно-импульсной модуляцией (ШИМ) электродвигателя на постоянных магнитах.
Конструкция устройства контроля должна предотвращать гармонические помехи от высокочастотной электрической мощности с широтно-импульсной модуляцией.
Проблема 5: требование получения сигнала лучшего качества, когда устройство контроля включено.
Внутренний ротор экранированного электронасоса имеет большее пространство аксиального свободного перемещения при использовании в случае высокой стойкости к коррозии, так что магнитный поток устройства контроля легко меняет направление, и дрейфа сигнала, обусловленного подачей разного напряжения, необходимо избежать.
Проблема 6: компоненты должны легко ремонтироваться и заменяться.
При ремонте или замене компонента необходимо избежать проблемы позиционирования или иных персональных факторов.
Настоящее изобретение позволяет повысить жесткость неподвижного вала экранированного электронасоса с двигателем на постоянных магнитах в любом диапазоне мощности при разумных расходах, и устройство контроля может устанавливаться, если в этом возникнет необходимость. Следовательно, обеспечивается надежность и продлевается срок службы, и, кроме того, настоящее изобретение подходит как для простой конструкции неподвижного вала, так и составной конструкции вала.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Целью предлагаемого экранированного электронасоса с двигателем на постоянных магнитах, далее по тексту именуемого экранированным электронасосом, является повысить жесткость неподвижного вала, и устройство контроля, такое как устройство контроля для обнаружения износа подшипника или другие устройства контроля, устанавливается, если в этом возникнет необходимость, для повышения надежности насоса или т.п. Если насос используется в высокотемпературном и высокоагрессивном технологическом процессе, решение описывается следующим образом:
Целью предлагаемого экранированного электронасоса является повысить жесткость неподвижного вала, и устройство контроля устанавливается, если в этом возникнет необходимость. Для того чтобы повысить жесткость неподвижного вала, способ повышения жесткости неподвижного вала включает следующие стадии: стадию, на которой в пространство внутреннего диаметра ярма внутреннего ротора экранированного электродвигателя в аксиальном направлении вставляют металлическую заднюю опору вала металлической конструкции заднего корпуса экранированного электродвигателя; стадию, на которой агрессивную текучую среду изолируют посредством глухой задней опоры вала защитной оболочки; стадию, на которой металлическую заднюю опору вала плотно крепят к глухой задней опоре вала для повышения жесткости неподвижного вала посредством большей длины удерживания и уменьшения длины плеча равнодействующей силы. Как результат, за счет повышения жесткости неподвижного вала повышается конструктивная надежность.
Глухая задняя опора вала защитной оболочки имеет достаточное пространство в радиальном и аксиальном направлениях для размещения в нем устройства контроля, например устройства контроля для обнаружения износа подшипника, благодаря чему обеспечивается надежность насоса или выполнение других требований. Устройство контроля содержит вспомогательные магниты и комплект контроля, между которыми проходят замкнутые силовые линии магнитного поля. Число вспомогательных магнитов равно числу основных магнитов, а объем вспомогательных магнитов менее одной десятой объема основных магнитов. Вспомогательные магниты, установленные на внутренней стороне ярма внутреннего ротора и сзади на основные магниты, и внутренний ротор герметизированы для предотвращения их коррозии от агрессивной текучей среды, и при этом магнитный путь ярма ротора и магнитный путь ярма статора могут сосуществовать в ярме ротора (т.е., силовые линии магнитного поля устройства контроля без помех проходят через ярмо ротора).
В случае использования более длинного подшипника для выполнения требований в части нагрузки используется более длинное ярмо ротора, и при этом вспомогательные магниты могут легко собираться на ярме ротора. Комплект контроля содержит вспомогательное ярмо и элементы контроля, и при вращении внутреннего ротора элементы контроля пересекают силовые линии магнитного поля с выдачей сигналов напряжения. Защитная оболочка защищает комплект контроля, установленный в кольцевом пазу глухой задней опоры вала. Элементы контроля могут представлять собой пары сигнальных катушек, которые используются для контроля износа подшипника, или датчик Холла, который используется для обнаружения полюса магнита и привода экранированного электронасоса, и при этом экранированный электронасос может приводиться либо исполнительным устройством без устройства контроля (далее по тексту именуемый бездатчиковый экранированный электронасос), либо исполнительным устройством с устройством контроля (далее по тексту именуемый датчиковый экранированный электронасос), и тем самым обеспечивается удобство для пользователя в части выбора оборудования.
Аксиальная длина вспомогательных магнитов более чем в два раза превышает длину аксиального свободного перемещения внутреннего ротора (включая аксиальный износ подшипника); силовые линии магнитного поля выходят с поверхности вспомогательного магнита и проходят через воздушный зазор во вспомогательное ярмо, продолжаясь в внутренний вспомогательный магнит по силовым линиям обратного магнитного поля, затем через ярмо ротора в первоначальный вспомогательный магнит, таким образом образуя замкнутый контур. Элементы контроля комплекта контроля, например пары сигнальных катушек и датчик Холла, установлены на поверхности вспомогательного ярма и герметизированы как комплект изоляционного материала; комплект контроля установлен в кольцевом пазу нижней части защитной оболочки; кольцевой паз имеет отверстие, позволяющее собрать комплект контроля с наружной стороны на нижней части защитной оболочки, причем внутренняя поверхность вспомогательного ярма плотно прилегает к металлической задней опоре вала, задний конец вспомогательного ярма имеет точку совмещения, и ее электрическое угловое положение связано с еще одной точкой совмещения на оси металлической задней опоры вала заднего корпуса электродвигателя, и, когда статор экранированного электродвигателя собран в корпусе электродвигателя, связано с контрольной точкой электрического углового положения статора обмоток.
В комплекте контроля, имеющем пары сигнальных катушек, размер окружности каждой сигнальной катушки не более электрического внутреннего угла 180 градусов, хотя он варьирует в зависимости от количества полюсов вспомогательных магнитов, причем каждая сигнальная катушка, вращающаяся с достаточной частотой вращения, пересекает силовые линии магнитного поля для выдачи сигналов напряжения. Пары сигнальных катушек разбиты на две группы, причем разность фаз пространственного внутреннего угла между двумя группами составляет 90 градусов. Варианты расположения каждой группы включают вариант, в котором разность фаз пространственного внутреннего угла между двумя парами сигнальных катушек в одной и той группе составляет 180 градусов, и другой вариант, в котором две группы установлены в линию, обращенными в аксиальном направлении. Частоту вращения внутреннего ротора, центробежный угол оси, аксиальное положение и радиальное положение можно рассчитать после рабочих сигналов из пары сигнальных катушек. Центробежный угол оси дает подробную информацию о пути перемещения. Путем сравнения с положением внутреннего ротора определяют величину износа радиального и упорного подшипников. Кроме того, может передаваться предупредительное уведомление об износе или работа насоса останавливается устройством контроля. Выходное напряжение пар сигнальных катушек уменьшается в соответствии с наклоном и частотой вращения внутреннего ротора, но такое условие не применимо, когда номинальная частота вращения ниже сорока процентов, например номинальная частота вращения равна 3000 мин-1.
Далее изобретение объясняется на примере следующих конструкций, некоторые из которых имеют устройство контроля, а некоторые нет, и эти конструкции не имеют своей целью ограничить объем настоящего изобретения;
в пределах объема настоящего изобретения находятся и другие конструкции, выполняющие ту же функцию.
Стратегия 1. Конструктивное усовершенствование экранированного электронасоса призвано повысить жесткость неподвижного вала и, при необходимости, установить устройство контроля. Способ повышения жесткости неподвижного вала включает следующие стадии: стадию, на которой во внутреннее пространство ярма внутреннего ротора экранированного электродвигателя в аксиальном направлении вставляют металлическую заднюю опору вала металлической конструкции заднего корпуса экранированного электродвигателя; стадию, на которой агрессивную текучую среду изолируют посредством глухой задней опоры вала защитной оболочки; стадию, на которой металлическую заднюю опору вала плотно крепят к глухой задней опоре вала для повышения жесткости неподвижного вала посредством большей длины удерживания и уменьшения длины плеча равнодействующей силы. Как результат, за счет повышения жесткости неподвижного вала повышается конструктивная надежность.
Стратегия 2. Внутренняя сторона глухой задней опоры вала защитной оболочки обеспечивает пространство для установки устройства контроля, например устройства контроля для обнаружения износа подшипника, благодаря чему обеспечивается надежность насоса. Устройство контроля содержит вспомогательные магниты и комплект контроля, которые образуют замкнутое магнитное поле. Вспомогательные магниты установлены противоположно основным магнитам на внутренней стороне ярма внутреннего ротора в соответствующем положении. Внутренний ротор герметизирован для предотвращения коррозии от агрессивной текучей среды. Комплект контроля, содержащий вспомогательное ярмо и элементы контроля, установлен в кольцевом пазу глухой задней опоры вала защитной оболочки, благодаря чему комплект контроля защищен защитной оболочкой. Элементы контроля представляют собой, например, пары сигнальных катушек для контроля износа подшипника.
Стратегия 3. Устройство контроля во внутреннем пространстве ярма ротора содержит вспомогательные магниты и комплект контроля. Объем вспомогательных магнитов менее одной десятой объема магнитов, создающих прямое магнитное поле (основных магнитов), так что стоимость этих магнитов меньше, чем стоимость удлиненных магнитов, создающих прямое магнитное поле; кроме того, если для выдерживания более высокой нагрузки используется более длинный подшипник, может использоваться более длинное ярмо ротора, и вспомогательные магниты могут собираться на ярме ротора.
Стратегия 4. Магнитный путь ярма ротора, создаваемый силовыми линиями магнитного поля, и гармоническими волнами, создаваемыми источником высокочастотной ШИМ-мощности, проходит через ярмо ротора. Ярмо ротора экранирует устройство контроля, установленное во внутреннем пространстве ярма ротора. Число вспомогательных магнитов устройства контроля равно числу основных магнитов, и вспомогательные магниты установлены противоположно основным магнитам на внутренней стороне ярма внутреннего ротора в соответствующем положении, и при этом магнитный путь ярма ротора и магнитный путь ярма статора могут сосуществовать в ярме ротора (т.е., силовые линии магнитного поля устройства контроля проходят через ярмо ротора без помех со стороны силовых линий магнитного пути ярма ротора). Силовые линии магнитного поля выходят с поверхности вспомогательного магнита и проходят через воздушный зазор во вспомогательное ярмо, продолжаясь в внутренний вспомогательный магнит по силовым линиям обратного магнитного поля, затем через ярмо ротора в первоначальный вспомогательный магнит, таким образом образуя замкнутый контур; при вращении внутреннего ротора элементы контроля пересекают силовые линии магнитного поля с выдачей сигналов напряжения, и таким образом, сигнал напряжения не зависит от внешнего напряжения и не подвергается его влиянию.
Стратегия 5. Длина кольцеобразного вспомогательного ярма автономного устройства контроля больше суммы аксиальной длины ярма ротора и длины аксиального перемещения внутреннего ротора и больше общей аксиальной длины пар сигнальных катушек; аксиальная длина каждой сигнальной катушки больше 60% длины вспомогательного магнита; общая аксиальная длина пар сигнальных катушек больше суммы аксиальной длины вспомогательных магнитов и длины аксиального свободного перемещения внутреннего ротора, поэтому при вращении внутреннего ротора магнитный путь ярма ротора остается устойчивым без искажения, а вспомогательные магниты могут перемещаться в аксиальном направлении, что дает в результате надежные выходные сигналы, на которые не влияют внешние помехи. Количество силовых линий магнитного поля, пересекаемых парами сигнальных катушек, уменьшается пропорционально аксиальному перемещению внутреннего ротора или аксиальному износу подшипника. Дифференциальное напряжение между сигналами, создаваемыми двумя сигнальными катушками, противоположными одна другой, пропорционально радиальному смещению внутреннего ротора или радиальному износу подшипника.
Стратегия 6. Задний конец вспомогательного ярма имеет точку совмещения, совпадающую с еще одной точкой совмещения металлической задней опоры вала заднего корпуса электродвигателя, и, когда статор экранированного электродвигателя собран в корпусе электродвигателя с совпадением точек совмещения, электрический угол положения ярма статора и ярма ротора будет совпадать. Элементы контроля и ярмо герметизированы как полный комплект контроля, что облегчает обслуживание и замену и обеспечивает коррекцию магнитного позиционирования.
Далее изобретение дополнительно объясняется на примере следующих конструкций, некоторые из которых имеют устройство контроля, а некоторые нет, и эти конструкции не имеют своей целью ограничить объем настоящего изобретения; в пределах объема настоящего изобретения находятся и другие конструкции, выполняющие ту же функцию.
1. Бездатчиковый экранированный электронасос, которому требуется приводное устройство, работающее в бездатчиковом режиме, для привода насоса:
(a) простой неподвижный вал: неподвижный вал предназначен для обычного использования с полным диапазоном мощности и низкой вероятностью износа подшипника; проходящая в аксиальном направлении глухая задняя опора вала защитной оболочки и металлическая задняя опора вала укорачивают длину плеча равнодействующей силы, и металлическая задняя опора вала и глухая задняя опора вала плотно объединены для повышения жесткости неподвижного вала.
(b) составной неподвижный вал: неподвижный вал используется в области, связанной с широким диапазоном мощности и низкой вероятностью износа подшипника, работающего при высокой температуре, связанной с требуемым низким допускаемым кавитационным запасом (ДКЗ); проходящая в аксиальном направлении глухая задняя опора вала защитной оболочки и металлическая задняя опора вала укорачивают длину плеча равнодействующей силы, и его керамическая втулка плотно зажата винтами между кольцевой головкой металлического вала и сжатой поверхностью металлической задней опоры вала, тем самым повышая жесткость неподвижного вала.
2. Датчиковый экранированный электронасос, которому требуется приводное устройство, работающее в бездатчиковом режиме, для привода насоса:
(a) простой неподвижный вал: неподвижный вал предназначен для обычного использования с полным диапазоном мощности и высокой вероятностью износа подшипника; проходящая в аксиальном направлении глухая задняя опора вала защитной оболочки и металлическая задняя опора вала укорачивают длину плеча равнодействующей силы, и металлическая задняя опора вала и глухая задняя опора вала плотно объединены для повышения жесткости неподвижного вала; вспомогательные магниты установлены противоположно основным магнитам на внутренней стороне ярма ротора внутреннего ротора в соответствующем положении, и комплект контроля устройства контроля, содержащий вспомогательное ярмо и пары сигнальных катушек, туго закреплен на металлической задней опоре вала и помещен в кольцевой паз глухой задней опоры вала защитной оболочки для контроля износа подшипника; для выполнения требований в части нагрузки используется более длинный подшипник, и поэтому может использоваться более длинное ярмо ротора, и вспомогательные магниты могут устанавливаться на ярме ротора.
(b) составной неподвижный вал: неподвижный вал предназначен для обычного использования с широким диапазоном мощности и высокой вероятностью износа подшипника, работающего при высокой температуре, связанного с требуемым низким ДКЗ; проходящая в аксиальном направлении глухая задняя опора вала защитной оболочки и металлическая задняя опора вала укорачивают длину плеча равнодействующей силы, и его керамическая втулка плотно зажата винтами между кольцевой головкой металлического вала и сжатой поверхностью металлической задней опоры вала, тем самым повышая жесткость неподвижного вала; вспомогательные магниты установлены противоположно основным магнитам на внутренней стороне ярма ротора внутреннего ротора в соответствующем положении, и комплект контроля устройства контроля, содержащий вспомогательное ярмо и пары сигнальных катушек, туго закреплен на металлической задней опоре вала и помещен в кольцевой паз заднего гнезда вала защитной оболочки для контроля износа подшипника; для выполнения требований в части нагрузки используется более длинный подшипник, и поэтому может использоваться более длинное ярмо ротора, и вспомогательные магниты могут устанавливаться на ярме ротора.
3. Конструкция устройства контроля:
Устройство контроля содержит вспомогательные магниты, установленные противоположно основным магнитам на внутренней стороне ярма ротора внутреннего ротора в соответствующем положении, и комплект контроля, содержащий вспомогательное ярмо и элементы контроля, плотно прикреплен на металлической задней опоре вала и помещен в кольцевой паз глухой задней опоры вала защитной оболочки для контроля износа подшипника, и элемент контроля, который содержит как датчик Холла, так и пары сигнальных катушек, требует приводное устройство, работающее в датчиковом режиме; если элемент контроля представляет собой лишь пары сигнальных катушек, необходимо приводное устройство, работающее в бездатчиковом режиме.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКОГО МАТЕРИАЛА
Настоящее изобретение станет более понятным из нижеследующего подробного описания с прилагаемыми графическими материалами, приведенными исключительно с иллюстративной целью и, таким образом, не ограничивающими объем настоящего изобретения, на которых:
ФИГ.1А представляет собой разрез двусторонне опертого неподвижного вала без какого-либо устройства контроля экранированного электронасоса в соответствии с настоящим изобретением;
ФИГ.1В представляет собой разрез двусторонне опертого неподвижного вала с устройством контроля экранированного электронасоса в соответствии с настоящим изобретением;
ФИГ.1C представляет собой разрез односторонне опертого консольного составного неподвижного вала без какого-либо устройства контроля экранированного электронасоса в соответствии с настоящим изобретением;
ФИГ.1D представляет собой разрез односторонне опертого консольного составного неподвижного вала с устройством контроля экранированного электронасоса в соответствии с настоящим изобретением;
ФИГ.1Е представляет собой разрез двусторонне опертого неподвижного вала с устройством контроля и с удлиненным подшипником экранированного электронасоса в соответствии с настоящим изобретением;
ФИГ.2 представляет собой разрез внутреннего ротора электродвигателя и рабочего колеса, объединенных в один блок, в соответствии с настоящим изобретением;
ФИГ.3А представляет собой разрез защитной оболочки двусторонне опертого неподвижного вала экранированного электронасоса в соответствии с настоящим изобретением;
ФИГ.3В представляет собой разрез защитной оболочки консольного неподвижного вала экранированного электронасоса в соответствии с настоящим изобретением;
ФИГ.4А иллюстрирует аксиальную длину удерживания L двусторонне опертого неподвижного вала в соответствии с настоящим изобретением;
ФИГ.4В иллюстрирует аксиальную длину удерживания L консольного неподвижного вала в соответствии с настоящим изобретением;
ФИГ.5А иллюстрирует несколько сил подшипника внутреннего ротора и их моментов на двусторонне опертом неподвижном валу в соответствии с настоящим изобретением;
ФИГ.5В иллюстрирует несколько сил подшипника внутреннего ротора и их моментов на односторонне опертом консольном неподвижном валу в соответствии с настоящим изобретением;
ФИГ.6А представляет собой радиальный разрез устройства контроля для обнаружения износа подшипника электродвигателя в соответствии с настоящим изобретением;
ФИГ.6В представляет собой аксиальный разрез устройства контроля для обнаружения износа подшипника электродвигателя в соответствии с настоящим изобретением;
ФИГ.6С представляет собой схематический вид устройства контроля для обнаружения износа подшипника, использующего восемь пар сигнальных катушек, в соответствии с настоящим изобретением;
ФИГ.6D представляет собой схематический вид в перспективе устройства контроля для обнаружения износа подшипника в соответствии с настоящим изобретением;
ФИГ.6Е представляет собой схематический вид устройства контроля для обнаружения износа подшипника, использующего четыре пары сигнальных катушек, в соответствии с настоящим изобретением; и
ФИГ.7 представляет собой схематический вид устройства контроля экранированного электронасоса, содержащего три датчика Холла, в соответствии с настоящим изобретением.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Первый вариант осуществления: экранированный электронасос, содержащий двусторонне опертый неподвижный вал без какого-либо устройства контроля как показано на ФИГ.1А и 3А.
Обратимся к ФИГ.1А, 3А. ФИГ.1А представляет собой разрез двусторонне опертого неподвижного вала без какого-либо устройства контроля экранированного электронасоса в соответствии с настоящим изобретением, а ФИГ.3А представляет собой разрез защитной оболочки двусторонне опертого неподвижного вала экранированного электронасоса в соответствии с настоящим изобретением. Экранированный электронасос содержит: корпус 4 насоса, треугольную переднюю опору 31, рабочее колесо 5 типа I, защитную оболочку 41 типа I, неподвижный вал 3 и экранированный электродвигатель 8.
Корпус 4 насоса содержит входное отверстие 44, выходное отверстие 45 и проточный канал 47 и используется для размещения в нем рабочего колеса 5 типа I. Переднее упорное кольцо 46, установленное на внутренней стороне входного отверстия 44 корпуса 4 насоса, используется для сопряжения с упорным подшипником 53 рабочего колеса 5 типа I для образования вместе аксиального упорного подшипника.
Треугольная передняя опора 31, соединенная с входным отверстием 44 корпуса 4 насоса, проходит через отверстие 54 ступицы в аксиальном направлении для поддержки конца неподвижного вала 3.
В корпусе 4 насоса собрано рабочее колесо 5 типа I. Треугольная передняя опора 31 может проходить через отверстие 54 ступицы в аксиальном направлении и используется для поддерживания конца неподвижного вала 3. Ступица 52 используется для объединения с проходящей в аксиальном направлении частью 76 внутреннего ротора 7 экранированного электродвигателя 8, при этом рабочее колесо 5 типа I и внутренний ротор 7 объединены в единый узел или заделаны для объединения в единый узел.
Защитная оболочка 41 типа I представляет собой чашевидную конструкцию с глухой задней опорой 413 вала, установленной на нижней стороне защитной оболочки 41 типа I. В глухой задней опоре 413 вала с кольцевым пазом 413b нет сквозного отверстия для исключения утечки из защитной оболочки 41 типа I. Фланец 411 оболочки, установленный на передней стороне защитной оболочки 41 типа I, объединен с корпусом 4 насоса и фланцем 811 насоса экранированного электродвигателя 8 для предотвращения утечки агрессивной текучей среды. Колонная часть 412 оболочки, установленная на боковой стороне защитной оболочки 41 типа I, проходит через внутреннюю сторону статора 83 с неплотной скользящей посадкой. Задний корпус 82 экранированного электродвигателя 8 плотно прикреплен на нижней стороне защитной оболочки 41 типа I с достаточной прочностью опоры. Глухая задняя опора 413 вала установлена в центре нижней стороны защитной оболочки 41 типа I и проходит вовнутрь и в аксиальном направлении во внутреннее пространство ярма 72 ротора. Глухая задняя опора 413 вала содержит отверстие 413а для удерживания вала, проходящее вовнутрь и расположенное в глухой задней опоре 413 вала, а также кольцевой паз 413b, выполненный на наружной стороне глухой задней опоры 413 вала. Заднее упорное кольцо 414 установлено на передней поверхности отверстия 413а для удерживания вала и используется для сопряжения с керамическим подшипником 79 внутреннего ротора 7 для образования аксиального упорного подшипника. Наружная боковая поверхность отверстия 413а для удерживания вала полностью объединена с металлической задней опорой 821а вала заднего корпуса 82 электродвигателя и поддерживается ею, а нижняя сторона отверстия 413а для удерживания вала полностью совпадает с внутренней стороной выпуклой назад части 823 заднего корпуса 82 электродвигателя, а длина выпуклой части 823 соответствует глубине Н отверстия 413а для удерживания вала для обеспечения высокожесткой опоры для неподвижного вала 3. Далее по тексту этот вид конструкции называется металлической удерживающей опорой. Защитная оболочка 41 типа I используется лишь для обеспечения стойкой к коррозии изоляции без обеспечения жесткой опоры для неподвижного вала 3.
Неподвижный вал 3, представляющий собой двусторонне опертую конструкцию, изготовлен из стойкого к коррозии и износостойкого керамического материала. Передняя сторона неподвижного вала 3 опирается на треугольную переднюю опору 31, а задняя сторона неподвижного вала 3 поддерживается глухой задней опорой 413 вала, проходящей наружу. Центральная часть неподвижного вала 3 сопрягается с керамическим подшипником 79 для поддержки вращения внутреннего ротора 7, и длина центральной части неподвижного вала 3 соответствует длине керамического подшипника 79, и, таким образом, длина центральной части является подходящей для выдерживания равнодействующей силы, переносимой внутренним ротором 7, и резервирования пространства аксиального свободного перемещения для внутреннего ротора 7. Кольцевой паз 413b глухой задней опоры 413 вала плотно объединен с металлической задней опорой 821а вала заднего корпуса 82 электродвигателя и поддерживается ею и обеспечивает длину удерживания L. Кроме того, кольцевой паз 413b может решить проблему снижения прочности пластмассы из-за повышения температуры.
Экранированный электродвигатель 8 содержит статор 83, корпус 81 электродвигателя, задний корпус 82 электродвигателя и внутренний ротор 7.
Статор 83 плотно закреплен в корпусе 81 электродвигателя. На статор 83 намотаны обмотки 831. Электрическая ШИМ-мощность, прикладываемая к обмоткам 831, создает магнитный поток для взаимодействия с магнитным полем внутреннего ротора 7, внутренний ротор 7 создает крутящий момент и вращается для привода рабочего колеса 5 типа I для создания на выходе гидравлической мощности. Защитная оболочка 41 типа I предотвращает коррозию обмоток 831 статора 83 от агрессивной текучей среды.
Фланец 811 насоса корпуса 81 электродвигателя используется для плотного соединения с фланцем 411 оболочки и корпусом 4 насоса для предотвращения утечки агрессивной текучей среды. Задний фланец корпуса 81 электродвигателя используется для крепления заднего корпуса 82 электродвигателя для обеспечения полной конструктивной опоры, при этом металлическая задняя опора вала 821а заднего корпуса 82 электродвигателя может обеспечить опору, которую требует неподвижный вал 3.
Задний корпус 82 электродвигателя соединяется с задним фланцем корпуса 81 электродвигателя, при этом металлическая задняя опора вала 821а заднего корпуса 82 электродвигателя может обеспечить опору, которую требует неподвижный вал 3. Электрический силовой провод обмоток 831 статора 83 соединен с источником питания через выходной канал 822.
Внутренний ротор 7 представляет собой кольцеобразную конструкцию, содержащую основные магниты 71, ярмо 72 ротора и проходящую в аксиальном направлении часть 76 и образующую кольцеобразную смоляную оболочку 74 ротора, покрытую техническим пластиком, стойким к коррозии. В центральном отверстии внутреннего ротора 7 установлен керамический подшипник 79. Ступица 52 используется для объединения с проходящей в аксиальном направлении частью 76 внутреннего ротора 7, при этом рабочее колесо 5 типа I и внутренний ротор 7 объединены в единый узел или заделаны для объединения в единый узел.
При работе насоса текучая среда протекает в направлении впуска 6 и после протекания через рабочее колесо 5 типа I, например в направлении 61 выхода из рабочего колеса, ее напор повышается. Текучая среда под давлением выходит через выходное отверстие 45, а часть текучей среды в направлении возврата 62 поступает во внутреннее пространство 415 защитной оболочки 41 типа I через заднюю сторону рабочего колеса 5 типа I. После этого текучая среда протекает в зазор между наружной стороной внутреннего ротора 7 и внутренним пространством 415 защитной оболочки 41 типа I и далее через еще один зазор между неподвижным валом 3 и керамическим подшипником 79. Затем текучая среда протекает через отверстие 54 ступицы в направлении 65 смазки конца во входное отверстие рабочего колеса 5 типа I. Циркуляция текучей среды используется для обеспечения смазки керамического подшипника 79 и отвода тепла, создаваемого внутренним ротором 7.
Второй вариант осуществления: экранированный электронасос, содержащий односторонне опертый консольный составной неподвижный вал без какого-либо устройства контроля, который показан на ФИГ.1C, ФИГ.3В и ФИГ.5В.
Обратимся к ФИГ.1C и ФИГ.3В. ФИГ.1C представляет собой разрез односторонне опертого консольного составного неподвижного вала без какого-либо устройства контроля экранированного электронасоса в соответствии с настоящим изобретением, ФИГ.3В представляет собой разрез защитной оболочки консольного неподвижного вала экранированного электронасоса в соответствии с настоящим изобретением, и ФИГ.5В иллюстрирует несколько сил подшипника внутреннего ротора и их моментов на односторонне опертом консольном неподвижном валу в соответствии с настоящим изобретением. Экранированный электронасос содержит металлический корпус 4а, рабочее колесо 5а типа II, защитную оболочку 41а типа II, составной неподвижный вал 3а и экранированный электродвигатель 8.
Металлический корпус 4а, который содержит входное отверстие 44, выходное отверстие 45 и проточный канал 47, используется для размещения в нем рабочего колеса 5а типа II. Металлический корпус 4а представляет собой металлическую конструкцию, полученную литьем. На внутренней стороне металлического корпуса 4а нанесена облицовка 4b, изготовленная из стойкого к коррозии пластика. Переднее упорное кольцо 46, установленное во входном отверстии 44 на внутренней стороне металлического корпуса 4а, используется для сопряжения с упорным подшипником 53 рабочего колеса 5а типа II для образования аксиального упорного подшипника.
В металлическом корпусе 4а установлено рабочее колесо 5а типа II. Ступица 52 используется для объединения с проходящей в аксиальном направлении частью 76 внутреннего ротора 7, так что рабочее колесо 5а типа II и внутренний ротор 7 объединены в единый узел или заделаны для объединения в единый узел. Отверстие 54а в ступице - это отверстие в центре кривой ступицы 55 для обеспечения повторной циркуляции циркулирующей текучей среды, например, в направлении 65 смазки конца. Входное отверстие 44 металлического корпуса 4а и входное отверстие рабочего колеса 5а типа II образуют гладкий канал с увеличивающимся внутренним диаметром без какого-либо возмущения, и форма кривой ступицы 55 также представляет собой форму плавной кривой. Следовательно, это преимущественно для снижения скорости потока текучей среды с целью обеспечения, что насос имеет хорошую характеристику в части ДКЗ.
Защитная оболочка 41а типа II представляет собой чашевидную конструкцию, имеющую заднее гнездо 418 вала, имеющее отверстие, установленную на нижней стороне защитной оболочки 41а типа II. Фланец 411 оболочки, установленный на передней стороне защитной оболочки 41а типа II, объединен с металлическим корпусом 4а и фланцем 811 насоса экранированного электродвигателя 8, что предотвращает утечку текучей среды. Колонная часть 412 оболочки, установленная на боковой стороне защитной оболочки 41а типа II, проходит через внутреннюю сторону статора 83 с неплотной скользящей посадкой. Кроме того, нижняя сторона защитной оболочки 41а типа II плотно прикреплена к заднему корпусу 82 электродвигателя с достаточной прочностью опоры. Заднее гнездо 418 вала, установленное в центре на нижней стороне защитной оболочки 41а типа II, проходит вовнутрь во внутреннее пространство ярма 72 ротора, и заднее гнездо 418 вала, кроме того, выступает вовнутрь и содержит отверстие 418а, выполненное на внутренней стороне заднего гнезда 418 вала, и углубление 418b, выполненное на наружной стороне заднего гнезда 418 вала, соответствующие друг другу, причем отверстие, выполненное в центре заднего гнезда 418 вала, используется для размещения в нем составного неподвижного вала 3а, и уплотняющая поверхность 418d заднего гнезда 418 вала плотно прикреплена к поверхности керамической гильзы 33 вала, включая уплотнительное кольцо и металлическую заднюю опору 821а вала заднего корпуса 82 электродвигателя, и далее по тексту этот вид конструкции называется металлической составной опорой, которая может обеспечить отсутствие утечек. Этот вариант осуществления не имеет какого-либо устройства контроля, чтобы обеспечить устройство для обнаружения износа подшипника.
Составной неподвижный вал 3а, представляющий собой консольно опертую конструкцию, выполнен из керамической втулки 33 вала, металлического вала 32 и заднего корпуса 82 электродвигателя со стойкостью к коррозии и износу. Составной неподвижный вал 3а и защитная оболочка 41а типа II образуют полностью уплотненную систему вала. Когда конец составного неподвижного вала 3а установлен на составную металлическую заднюю опору 821с вала заднего корпуса 82 электродвигателя, обеспечивается требуемая прочность опоры. Металлический вал 32 проходит через центральное отверстие 332 керамической втулки 33 вала и содержит круглую головку 321, установленную на конце металлического вала 32 и плотно прижатую к передней торцевой поверхности 333 керамической втулки 33 вала. Зубчатая часть 323 металлического вала 32 проходит через заднее гнездо 418 вала защитной оболочки 41а типа II и центральное отверстие металлической задней опоры 821с составного вала, проходящей вовнутрь в радиальном направлении. На заднем корпусе 82 электродвигателя предусмотрена гайка зубчатой части 323, которой скользящая упорная поверхность 331 керамической втулки 33 вала плотно прижата к поверхности металлической задней опоры 821 с составного вала. Круглая головка 321 металлического вала 32 покрыта смоляной оболочкой 322, и на круглой головке 321 установлено уплотнительное кольцо, используемое для уплотнения и стойкости к коррозии. Скользящая упорная поверхность 331 керамической втулки 33 вала используется для сопряжения с керамическим подшипником 79 внутреннего ротора 7 для образования аксиального упорного подшипника. Поверхность скользящей упорной поверхности 331 и поверхность металлической задней опоры 821с составного вала заднего корпуса 82 электродвигателя плотно соединены и прижаты друг к другу, и уплотняющая поверхность 418d заднего гнезда 418 вала, уплотненная и выполненная между скользящей упорной поверхностью 331 и металлической задней опорой 821с составного вала, герметизируется поверхностью скользящей упорной поверхности 331, содержащей еще одно уплотнительное кольцо, которое гарантирует отсутствие утечек, и при этом образуется составной неподвижный вал 3а с высокой жесткостью.
Экранированный электродвигатель 8 содержит статор 83, корпус электродвигателя 81, задний корпус 82 электродвигателя и внутренний ротор 7.
Статор 83 плотно закреплен в корпусе 81 электродвигателя. На статор 83 намотаны обмотки 831. Электрическая ШИМ-мощность, прикладываемая к обмоткам 831, может создавать магнитный поток для взаимодействия с магнитным полем внутреннего ротора 7, при этом внутренний ротор 7 создает крутящий момент и вращается для привода рабочего колеса 5а типа II для создания на выходе гидравлической мощности. Защитная оболочка 41а типа II предотвращает коррозию обмоток 831 статора 83 от агрессивной текучей среды.
Фланец 811 насоса, установленный на боковой со стороны насоса стороне корпуса 81 электродвигателя, используется для плотного соединения с фланцем 411 оболочки и металлическим корпусом 4а для предотвращения утечки агрессивной текучей среды. Задний фланец корпуса 81 электродвигателя используется для крепления заднего корпуса 82 электродвигателя для обеспечения полной конструктивной опоры, при этом металлическая задняя опора 821с составного вала заднего корпуса 82 электродвигателя может обеспечить опору, которую требует составной неподвижный вал 3а.
Задний корпус 82 электродвигателя плотно соединяется с задним фланцем корпуса 81 электродвигателя, при этом металлическая задняя опора 821с составного вала заднего корпуса 82 электродвигателя может обеспечить опору, которую требует составной неподвижный вал 3а. Электрический силовой провод обмоток 831 статора 83 соединен с источником питания через выходной канал 822.
Внутренний ротор 7 представляет собой кольцеобразную конструкцию, содержащую основные магниты 71, ярмо 72 ротора и проходящую в аксиальном направлении часть 76 и образующую кольцеобразную смоляную оболочку 74 ротора, покрытую техническим пластиком, стойким к коррозии. В центральном отверстии внутреннего ротора 7 установлен керамический подшипник 79. Ступица 52 используется для объединения с проходящей в аксиальном направлении частью 76 внутреннего ротора 7, при этом рабочее колесо 5а типа II и внутренний ротор 7 объединены в единый узел или заделаны для объединения в единый узел.
При работе насоса текучая среда протекает в направлении впуска 6 и после протекания через рабочее колесо 5 типа II, например в направлении 61 выхода из рабочего колеса, ее напор повышается. Текучая среда под давлением выходит через выходное отверстие 45, а часть текучей среды в направлении возврата 62 поступает во внутреннее пространство 415 защитной оболочки 41а типа II через заднюю сторону рабочего колеса 5а типа II. После этого текучая среда протекает в зазор между наружной стороной внутреннего ротора 7 и внутренним пространством 415 защитной оболочки 41а типа II далее через еще один зазор между составным неподвижным валом 3а и керамическим подшипником 79. Затем текучая среда протекает через отверстие 54а ступицы, выполненное в центре кривой ступицы 55, в направлении 65 смазки конца во входное отверстие рабочего колеса 5а типа II. Циркуляция текучей среды используется для обеспечения смазки керамического подшипника 79 и отвода тепла, создаваемого внутренним ротором 7.
Третий вариант осуществления: экранированный электронасос, содержащий двусторонне опертый консольный составной неподвижный вал и устройство контроля, показанный на ФИГ.1В, 1Е и ФИГ.3А.
Обратимся к ФИГ.1В, 1Е и ФИГ.3А. ФИГ.1В представляет собой разрез двусторонне опертого неподвижного вала с устройством контроля экранированного электронасоса в соответствии с настоящим изобретением, ФИГ.1Е представляет собой разрез двусторонне опертого неподвижного вала с устройством контроля и с удлиненным подшипником экранированного электронасоса в соответствии с настоящим изобретением, и ФИГ.3А представляет собой разрез защитной оболочки двусторонне опертого неподвижного вал экранированного электронасоса в соответствии с настоящим изобретением. Экранированный электронасос содержит корпус 4 насоса, треугольную переднюю опору 31, рабочее колесо 5 типа I, защитную оболочку 41 типа I, устройство контроля 9, неподвижный вал 3 и экранированный электродвигатель 8.
Корпус 4 насоса содержит входное отверстие 44, выходное отверстие 45 и проточный канал 47 и для размещения в нем рабочего колеса используется 5 типа I. Переднее упорное кольцо 46, установленное на внутренней стороне входного отверстия 44 корпуса 4 насоса, используется для сопряжения с упорным подшипником 53 рабочего колеса 5 типа I для образования вместе аксиального упорного подшипника.
Треугольная передняя опора 31 закрепляется на входном отверстии 44 корпуса 4 насоса, проходит через отверстие 54 ступицы в аксиальном направлении и используется для поддерживания конца неподвижного вала 3.
В корпусе 4 насоса собрано рабочее колесо 5 типа I. Треугольная передняя опора 31 может проходить через отверстие 54 ступицы в аксиальном направлении и используется для поддерживания конца неподвижного вала 3.
Ступица 52 используется для объединения с проходящей в аксиальном направлении частью 76 внутреннего ротора 7 экранированного электродвигателя 8, при этом рабочее колесо 5 типа I и внутренний ротор 7 объединены в единый узел или заделаны для объединения в единый узел.
Защитная оболочка 41 типа I представляет собой чашевидную конструкцию, содержащую глухую заднюю опору 413 вала, установленную на нижней стороне защитной оболочки 41 типа I. В глухой задней опоре 413 вала с кольцевым пазом 413b нет сквозного отверстия для исключения утечки из защитной оболочки 41 типа I. Фланец 411 оболочки, установленный на передней стороне защитной оболочки 41 типа I, объединен с корпусом 4 насоса и фланцем 811 насоса экранированного электродвигателя 8 для предотвращения утечки агрессивной текучей среды. Колонная часть 412 оболочки, установленная на боковой стороне защитной оболочки 41 типа I, проходит через внутреннюю сторону статора 83 с неплотной скользящей посадкой. Задний корпус 82 экранированного электродвигателя 8 плотно прикреплен на нижней стороне защитной оболочки 41 типа I с достаточной прочностью опоры. Глухая задняя опора 413 вала установлена в центре нижней стороны защитной оболочки 41 типа I и проходит вовнутрь и в аксиальном направлении во внутреннее пространство ярма 72 ротора. Глухая задняя опора 413 вала содержит центральное отверстие 413 а для удерживания вала, проходящее вовнутрь, а также кольцевой паз 413b, выполненный на наружной стороне глухой задней опоры 413 вала. Заднее упорное кольцо 414 установлено на передней поверхности отверстия 413а для удерживания вала и используется для сопряжения с керамическим подшипником 79 внутреннего ротора 7 для образования аксиального упорного подшипника. Комплект контроля 93, содержащий вспомогательное ярмо 91 и несколько пар сигнальных катушек 92, установлен на контролирующей металлической задней опоре 82lb вала заднего корпуса 82 электродвигателя и вставлено в кольцевой паз 413b поверхности наружной боковой стенки отверстия 413а для удерживания вала. Нижняя сторона глухой задней опоры 413 вала полностью совпадает с внутренней стороной выпуклой части 823 заднего корпуса 82 электродвигателя. Длина выпуклой части 823 соответствует глубине Н отверстия 413а для удерживания вала для обеспечения высокожесткой опоры для неподвижного вала 3. Защитная оболочка 41 типа I используется лишь для обеспечения стойкой к коррозии изоляции без обеспечения жесткой опоры для неподвижного вала 3.
Устройство контроля 9, расположенное в кольцевом пазу 413b глухой задней опоры 413 вала, проходящем в аксиальном направлении, используется для обнаружения износа подшипника. Конструкция устройства контроля 9 содержит несколько вспомогательных магнитов 73 и комплект контроля 93. Число вспомогательных магнитов 73 равно числу основных магнитов 71. Вспомогательные магниты 73 собраны на одном конце внутренней стороны ярма 72 внутреннего ротора 7 вблизи нижней стороны защитной оболочки 41 типа I и обращены в сторону от основных магнитов 71. Аксиальная длина вспомогательных магнитов 73 по меньшей мере в два раза превышает длину аксиального перемещения (включая аксиальный износ подшипника) внутреннего ротора 7. Комплект контроля 93 содержит вспомогательное ярмо 91 (не показано) и несколько пар сигнальных катушек 92. Вспомогательное ярмо 91 расположено в центре вспомогательных магнитов 73 в качестве контрольной точки. Аксиальная длина вспомогательного ярма 91 разделена на две части: переднюю часть и заднюю часть. Когда вспомогательные магниты 73 перемещаются в аксиальном направлении, оба конца вспомогательных магнитов 73 не выходят за пределы двух частей вспомогательного ярма 91.
Неподвижный вал 3 представляет собой двусторонне опертую конструкцию, изготовленную из стойкого к коррозии и износостойкого керамического материала. Передняя сторона неподвижного вала 3 опирается на треугольную переднюю опору 31, а задняя сторона неподвижного вала 3 поддерживается глухой задней опорой 413 вала, проходящей наружу. Центральная часть неподвижного вала 3 сопрягается с керамическим подшипником 79 для поддержки вращения внутреннего ротора 7, и длина центральной части неподвижного вала 3 соответствует длине керамического подшипника 79 и оставляет пространство для аксиального свободного перемещения для внутреннего ротора 7. Кольцевой паз 413b глухой задней опоры 413 вала плотно объединен с металлической задней опорой 821а вала заднего корпуса 82 электродвигателя и поддерживается ею и обеспечивает длину удерживания L. Кроме того, кольцевой паз 413b может решить проблему снижения прочности пластмассы из-за повышения температуры.
Экранированный электродвигатель 8 содержит статор 83, корпус электродвигателя 81, задний корпус 82 электродвигателя и внутренний ротор 7.
Статор 83 плотно закреплен в корпусе 81 электродвигателя. На статор 83 намотаны обмотки 831. Электрическая ШИМ-мощность, прикладываемая к обмоткам 831, создает магнитный поток для взаимодействия с магнитным полем внутреннего ротора 7, внутренний ротор 7 создает крутящий момент и вращается для привода рабочего колеса 5 типа I для создания на выходе гидравлической мощности. Защитная оболочка 41 типа I предотвращает коррозию обмоток 831 статора 83 от агрессивной текучей среды.
Фланец 811 насоса корпуса 81 электродвигателя используется для плотного соединения с фланцем 411 оболочки и корпусом 4 насоса для предотвращения утечки агрессивной текучей среды. Задний фланец корпуса 81 электродвигателя используется для крепления заднего корпуса 82 электродвигателя для обеспечения полной конструктивной опоры, при этом контролирующая металлическая задняя опора вала 821а заднего корпуса 82 электродвигателя может обеспечить опору, которую требует неподвижный вал 3.
Задний корпус 82 электродвигателя соединяется с корпусом 81 электродвигателя, при этом контролирующая металлическая задняя опора 82lb вала заднего корпуса 82 электродвигателя может обеспечить опору, которую требует неподвижный вал 3. Электрический силовой провод обмоток 831 статора 83 соединен с источником питания через выходной канал 822.
Внутренний ротор 7 представляет собой кольцеобразную конструкцию, содержащую основные магниты 71, ярмо 72 ротора и проходящую в аксиальном направлении часть 76. Число вспомогательных магнитов 73 равно числу основных магнитов 71. Вспомогательные магниты 73 собраны на одном конце внутренней стороны ярма 72 внутреннего ротора 7 вблизи нижней стороны защитной оболочки 41 типа I и обращены в сторону от основных магнитов 71. В центральном отверстии внутреннего ротора 7 установлен керамический подшипник 79. Ступица 52 используется для объединения с проходящей аксиальном направлении частью 76 внутреннего ротора 7, при этом рабочее колесо 5 типа I и внутренний ротор 7 объединены в единый узел или заделаны для объединения в единый узел.
При работе насоса текучая среда протекает в направлении впуска 6 и после протекания через рабочее колесо 5 типа I, например в направлении 61 выхода из рабочего колеса, ее напор повышается. Текучая среда под давлением выходит через выходное отверстие 45, а часть текучей среды в направлении возврата 62 поступает во внутреннее пространство 415 защитной оболочки 41 типа I через заднюю сторону рабочего колеса 5 типа I. После этого текучая среда протекает в зазор между наружной стороной внутреннего ротора 7 и внутренним пространством 415 защитной оболочки 41 типа I и далее через еще один зазор между неподвижным валом 3 и керамическим подшипником 79. Затем текучая среда протекает через отверстие 54 ступицы в направлении 65 смазки конца во входное отверстие рабочего колеса 5 типа I. Циркуляция текучей среды используется для обеспечения смазки керамического подшипника 79 и отвода тепла, создаваемого внутренним ротором 7.
Обратимся к ФИГ.1Е, представляющей собой разрез двусторонне опертого неподвижного вала с устройством контроля и с удлиненным подшипником экранированного электронасоса в соответствии с настоящим изобретением. В этом варианте осуществления предлагается экранированный электронасос с удлиненным керамическим подшипником 79 для тяжелого режима работы. Поэтому в этой конструкции насоса длина ярма 72 ротора может быть увеличена, чтобы соответствовать длине керамического подшипника 79.
Четвертый вариант осуществления: экранированный электронасос, содержащий односторонне опертый консольный составной неподвижный вал и устройство контроля, как показано на ФИГ.1D, 3В, 4В и 5В.
Обратимся к ФИГ.1D, 3В, 4В и 5В. ФИГ.1D представляет собой разрез односторонне опертого консольного составного неподвижного вала с устройством контроля экранированного электронасоса в соответствии с настоящим изобретением, ФИГ.3В представляет собой разрез защитной оболочки консольного неподвижного вала экранированного электронасоса в соответствии с настоящим изобретением, ФИГ.4В иллюстрирует аксиальную длину L удерживания консольного неподвижного вала в соответствии с настоящим изобретением и ФИГ.5В иллюстрирует несколько сил подшипника внутреннего ротора и их моментов на односторонне опертом консольном неподвижном валу в соответствии с настоящим изобретением. Экранированный электронасос содержит металлический корпус 4а, рабочее колесо 5а типа II, защитную оболочку 41а типа II, устройство 9 контроля, составной неподвижный вал 3а и экранированный электродвигатель 8.
Металлический корпус 4а, который содержит входное отверстие 44, выходное отверстие 45 и проточный канал 47, используется для размещения в нем рабочего колеса 5а типа II. Металлический корпус 4а представляет собой металлическую конструкцию, полученную литьем. На внутренней стороне металлического корпуса 4а нанесена облицовка 4b, изготовленная из стойкого к коррозии пластика. Переднее упорное кольцо 46, установленное во входном отверстии 44 на внутренней стороне металлического корпуса 4а, используется для сопряжения с упорным подшипником 53 рабочего колеса 5а типа II для образования аксиального упорного подшипника.
В металлическом корпусе 4а установлено рабочее колесо 5а типа II. Ступица 52 используется для объединения с проходящей в аксиальном направлении частью 76 внутреннего ротора 7, так что рабочее колесо 5а типа II и внутренний ротор 7 объединены в единый узел или заделаны для объединения в единый узел. Отверстие 54а в ступице - это отверстие в центре кривой ступицы 55 для обеспечения повторной циркуляции циркулирующей текучей среды, например в направлении 65 смазки конца. Входное отверстие 44 металлического корпуса 4а и входное отверстие рабочего колеса 5а типа II образуют гладкий канал с увеличивающимся внутренним диаметром без какого-либо возмущения, и форма кривой ступицы 55 также представляет собой форму плавной кривой. Следовательно, это преимущественно для снижения скорости потока текучей среды с целью обеспечения, что насос имеет хорошую характеристику в части ДКЗ.
Защитная оболочка 41а типа II представляет собой чашевидную конструкцию, имеющую заднее гнездо 418 вала, имеющее отверстие, установленную на нижней стороне защитной оболочки 41а типа II. Фланец 411 оболочки, установленный на передней стороне защитной оболочки 41а типа II, объединен с металлическим корпусом 4а и фланцем 811 насоса экранированного электродвигателя 8, что предотвращает утечку текучей среды. Колонная часть 412 оболочки, установленная на боковой стороне защитной оболочки 41а типа II, проходит через внутреннюю сторону статора 83 с неплотной скользящей посадкой. Кроме того, нижняя сторона защитной оболочки 41а типа II плотно прикреплена к заднему корпусу 82а электродвигателя с достаточной прочностью опоры. Заднее гнездо 418 вала в центре на нижней стороне защитной оболочки 41а типа II проходит вовнутрь к внутренней стороне ярма 72 ротора. Кроме того, заднее гнездо 418 вала выступает вовнутрь и содержит отверстие 418а, выполненное на внутренней стороне заднего гнезда 418 вала, и углубление 418b, выполненное на наружной стороне заднего гнезда 418 вала, соответствующие друг другу. Отверстие, выполненное в центре заднего гнезда 418 вала, используется для размещения в нем составного неподвижного вала 3а.
Уплотняющая поверхность 418d заднего гнезда 418 вала плотно прикреплена поверхностью керамической гильзы 33 вала, включая уплотнительное кольцо и контролирующую составную металлическую заднюю опору 821d вала заднего корпуса 82 электродвигателя, во избежание утечки.
Устройство контроля 9, расположенное на кольцеобразной поверхности углубления 418b заднего гнезда 418 вала, проходящего в аксиальном направлении, используется для обнаружения износа подшипника. Конструкция устройства контроля 9 содержит несколько вспомогательных магнитов 73 и комплект контроля 93. Число вспомогательных магнитов 73 равно числу основных магнитов 71. Вспомогательные магниты 73 собраны на одном конце внутренней стороны ярма 72 внутреннего ротора 7 вблизи нижней стороны защитной оболочки 41а типа II и обращены в сторону от основных магнитов 71.
Аксиальная длина вспомогательных магнитов 73 по меньшей мере в два раза превышает длину аксиального перемещения (включая аксиальный износ подшипника) внутреннего ротора 7. Комплект контроля 93 содержит вспомогательное ярмо 91 (не показано) и несколько пар 92 сигнальных катушек. Вспомогательное ярмо 91 расположено в центре вспомогательных магнитов 73 в качестве контрольной точки, причем аксиальная длина вспомогательного ярма 91 разделена на две части: переднюю часть и заднюю часть. Когда вспомогательные магниты 73 перемещаются, два аксиальных конца вспомогательных магнитов 73 не выходят за пределы двух частей вспомогательного ярма 91.
Составной неподвижный вал 3а, представляющий собой консольно опертую конструкцию, содержит керамическую втулку 33 вала, металлический вал 32 и задний корпус 82а электродвигателя. Составной неподвижный вал 3а и защитная оболочка 41а типа II образуют полностью уплотненную систему вала. Когда конец составного неподвижного вала 3а установлен на контролирующей металлической задней опоре 821d составного вала заднего корпуса 82 электродвигателя, обеспечивается требуемая прочность опоры. Металлический вал 32 проходит через центральное отверстие 332 керамической втулки 33 вала, причем круглая головка 321 металлического вала 32 плотно прижата к передней торцевой поверхности 333 керамической втулки 33 вала. Зубчатая часть 323 металлического вала 32 проходит через заднее гнездо 418 вала и центральное отверстие контролирующей металлической задней опоры 821d составного вала защитной оболочки 41а типа II, проходящей вовнутрь в радиальном направлении. На заднем корпусе 82а электродвигателя предусмотрена гайка зубчатой части 323, которой скользящая упорная поверхность 331 керамической втулки 33 вала плотно прижата к поверхности металлической задней опоры 821d составного вала. Круглая головка 321 металлического вала 32 покрыта смоляной оболочкой 322, и на круглой головке 321 установлено уплотнительное кольцо, используемое для уплотнения и стойкости к коррозии. Скользящая упорная поверхность 331 керамической втулки 33 вала используется для сопряжения с керамическим подшипником 79 внутреннего ротора 7 для образования аксиального упорного подшипника. Поверхность скользящей упорной поверхности 331 и поверхность контролирующей металлической задней опоры 821d составного вала заднего корпуса 82а электродвигателя плотно соединены и прижаты друг к другу, и уплотняющая поверхность 418d заднего гнезда 418 вала, плотно набитая между поверхностью 331 и контролирующей металлической задней опорой 821d составного вала, прижимает уплотнительное кольцо во избежание утечек, и при этом образуется составной неподвижный вал 3а с высокой жесткостью.
Экранированный электродвигатель 8 содержит статор 83, корпус 81 электродвигателя, задний корпус 82 электродвигателя и внутренний ротор 7.
Статор 83 плотно закреплен в корпусе 81 электродвигателя. На статор 83 намотаны обмотки 831. Электрическая ШИМ-мощность, прикладываемая к обмоткам 831, может создавать магнитный поток для взаимодействия с магнитным полем внутреннего ротора 7, при этом внутренний ротор 7 создает крутящий момент и вращается для привода рабочего колеса 5а типа II для создания на выходе гидравлической мощности. Защитная оболочка 41а типа II предотвращает коррозию обмоток 831 статора 83 от агрессивной текучей среды.
Фланец 811 насоса, установленный на боковой со стороны насоса стороне корпуса 81 электродвигателя, соединяет также фланец 411 оболочки и металлический корпус 4а для предотвращения утечки агрессивной текучей среды. Задний фланец корпуса 81 электродвигателя используется для крепления заднего корпуса 82а электродвигателя для обеспечения полной конструктивной опоры, при этом контролирующая металлическая задняя опора 821d составного вала заднего корпуса 82а электродвигателя может обеспечить опору, которую требует составной неподвижный вал 3а.
Задний корпус 82а электродвигателя плотно соединяется с задним фланцем корпуса 81 электродвигателя, при этом контролирующая металлическая задняя опора 821d составного вала заднего корпуса 82 электродвигателя может обеспечить опору, которую требует составной неподвижный вал 3а. Электрический силовой провод обмоток 831 статора 83 соединен с источником питания через выходной канал 822.
Внутренний ротор 7 представляет собой кольцеобразную конструкцию, содержащую основные магниты 71, ярмо 72 ротора и проходящую в аксиальном направлении часть 76. Число вспомогательных магнитов 73 равно числу основных магнитов 71. Вспомогательные магниты 73 собраны на одном конце внутренней стороны ярма 72 внутреннего ротора 7 вблизи нижней стороны защитной оболочки 41 типа I и обращены в сторону от основных магнитов 71.
Вспомогательные магниты 73 покрыты кольцеобразной смоляной оболочкой 74 ротора, изготовленной из технического пластика, стойкого к коррозии. В центральном отверстии внутреннего ротора 7 установлен керамический подшипник 79. Ступица 52 используется для объединения с проходящей в аксиальном направлении частью 76 внутреннего ротора 7, при этом рабочее колесо 5 типа II и внутренний ротор 7 объединены в единый узел или заделаны для объединения в единый узел.
При работе насоса текучая среда протекает в направлении впуска 6 и после протекания через рабочее колесо 5 типа II, например в направлении 61 выхода из рабочего колеса, ее напор повышается. Текучая среда под давлением выходит через выходное отверстие 45, а часть текучей среды в направлении возврата 62 поступает во внутреннее пространство 415 защитной оболочки 41а типа II через заднюю сторону рабочего колеса 5а типа II. После этого текучая среда протекает в зазор между наружной стороной внутреннего ротора 7 и внутренним пространством 415 защитной оболочки 41а типа II и далее через еще один зазор между составным неподвижным валом 3а и керамическим подшипником 79. Затем текучая среда протекает через отверстие 54а ступицы, выполненное в центре кривой ступицы 55, в направлении 65 смазки конца во входное отверстие рабочего колеса 5а типа II. Циркуляция текучей среды используется для обеспечения смазки керамического подшипника 79 и отвода тепла, создаваемого внутренним ротором 7.
Обратимся теперь к ФИГ.2, которая представляет собой разрез внутреннего ротора 7 электродвигателя и рабочего колеса 5 типа I, объединенных в один блок, в соответствии с третьим вариантом осуществления. Конструкция в этом варианте осуществления применима и к другим вариантам осуществления настоящего изобретения. Керамический подшипник 79, установленный в пустотелой части внутреннего ротора 7, используется для сопряжения с неподвижным валом 3 для образования гидродинамического подшипника, который используется для поддержки вращения внутреннего ротора 7 и передачи мощности электродвигателя. Проходящая в аксиальном направлении часть 76 используется для объединения со ступицей 52 для передачи крутящего момента внутреннего ротора 7. Вспомогательные магниты 73 собраны на одном конце внутренней стороны ярма 72 внутреннего ротора 7 и обращены в сторону от основных магнитов 71. Вспомогательные магниты 73 и внутренний ротор 7 герметизированы вместе для предотвращения коррозии. Число вспомогательных магнитов равно числу основных магнитов 71, но размер вспомогательных магнитов 73 менее одной десятой основных магнитов 71.
Обратимся к ФИГ.3А, которая представляет собой разрез защитной оболочки двусторонне опертого неподвижного вала экранированного электронасоса в соответствии с настоящим изобретением. Возьмем как пример защитную оболочку 41 типа I в соответствии с третьим вариантом осуществления, узел кольцевого паза 413b и комплект контроля 93 описываются следующим образом. Защитная оболочка 41 типа I представляет собой чашевидную конструкцию без какого-либо сквозного отверстия, благодаря чему утечка отсутствует. Глухая задняя опора 413 вала в центре нижней стороны защитной оболочки 41 типа I проходит вовнутрь. Проходящая в аксиальном направлении длина G проходит от нижней стороны защитной оболочки 41 типа I в сторону фланца 411 оболочки. Глухая задняя опора 413 вала выступает из внутренней стороны и имеет центральное отверстие 413а для удерживания вала, глубина которого Н проходит от отверстия глухой задней опоры 413 вала до нижней стороны отверстия 413а для удерживания вала. На наружной стороне защитной оболочки 41 типа I выполнен кольцевой паз 413b. На передней поверхности отверстия 413а для удерживания вала установлено заднее упорное кольцо 414. В кольцевом пазу 413b, который находится на наружной стороне глухой задней опоры 413 вала, может находиться комплект контроля 93, содержащий вспомогательное ярмо 91 и пары сигнальных катушек 92. Защитная оболочка 41 типа I используется лишь для обеспечения стойкой к коррозии изоляции без обеспечения жесткой опоры для неподвижного вала 3
Обратимся к ФИГ.3В, представляющей собой разрез защитной оболочки консольного неподвижного вала экранированного электронасоса в соответствии с настоящим изобретением. Возьмем как пример защитную оболочку 41а типа II четвертого варианта осуществления. Узел углубления 418b и комплект контроля 93 описываются следующим образом. Защитная оболочка 41а типа II представляет собой чашевидную конструкцию, имеющую отверстие, находящееся в центре нижней стороны и используемое для размещения в нем составного неподвижного вала 3а (как показано на ФИГ.1C). Заднее гнездо 418 вала в центре на нижней стороне защитной оболочки 41а типа II проходит вовнутрь во внутреннем пространстве. Заднее гнездо 418 вала представляет собой выпуклую конструкцию, имеющую отверстие 418а и выступающую с внутренней стороны. Проходящая в аксиальном направлении длина G проходит от нижней стороны защитной оболочки 41а типа II в сторону фланца 411 оболочки до уплотняющей поверхности 418d. Наружная сторона заднего гнезда 418 вала соответствует вогнутому отверстию 418b. Комплект контроля 93, расположенный на внутренней кольцеобразной поверхности углубления 418b, содержит вспомогательное ярмо 91 и несколько пар сигнальных катушек 92. Вспомогательное ярмо 91 плотно прикреплено к контролирующей металлической задней опоре 821d составного вала. Составной неподвижный вал 3а (показанный на ФИГ.1C) установлен в отверстии, находящемся в центре заднего гнезда 418 вала. Уплотняющая поверхность 418d заднего гнезда 418 вала плотно прижата скользящей упорной поверхностью 331 керамической втулки 33 вала (показанной на ФИГ.1C), содержащей уплотнительное кольцо и контролирующую металлическую заднюю опору 821d составного вала заднего корпуса 82а электродвигателя, что гарантирует отсутствие утечек из защитной оболочки 41а типа II. Опора жесткости составного неподвижного вала 3а полностью выходит из заднего корпуса 82а электродвигателя и длины удерживания L контролирующей металлической задней опоры 821d составного вала.
Обратимся к ФИГ.4А, иллюстрирующей аксиальную длину удерживания L двусторонне опертого неподвижного вала в соответствии с настоящим изобретением. Возьмем как пример двусторонне опертый неподвижный вал 3. Аксиальная длина удерживания L описывается следующим образом. Глухая задняя опора 413 вала расположена в центре нижней стороны защитной оболочки 41 типа I и проходит вовнутрь и в аксиальном направлении во внутреннее пространства ярма 72 ротора (показанного на ФИГ.1А). Глухая задняя опора 413 вала содержит отверстие 413а для удерживания вала (показанное на ФИГ.3А), выступающее вовнутрь и расположенное в глухой задней опоре 413 вала, и кольцевой паз 413b (показанный на ФИГ.3А), расположенный на наружной стороне глухой задней опоры 413 вала. В кольцевом пазу 413b (показанном на ФИГ.3А) установлен комплект контроля 93, содержащий вспомогательное ярмо 91 и пары сигнальных катушек 92. Прочность отверстия 413а для удерживания вала (показанного на ФИГ.3А), которое поддерживается контролирующей металлической задней опорой 821b вала заднего корпуса 82 электродвигателя и вспомогательным ярмом 91, плотно объединенными между собой, обеспечивается наружной боковой стенкой половины отверстия 413а для удерживания вала. Нижняя сторона отверстия 413а для удерживания вала полностью соответствует внутренней стороне выпуклой назад части 823 заднего корпуса 82 электродвигателя. Длина выпуклой части 823 соответствует длине удерживания L отверстия 413а для удерживания вала для обеспечения высокожесткой опоры.
То есть, защитная оболочка 41 типа I используется лишь для обеспечения стойкой к коррозии изоляции без обеспечения жесткой опоры для неподвижного вала 3.
Длина удерживания L определяется проходящей в аксиальном направлении длиной G глухой задней опоры 413 вала и глубиной Н отверстия для удерживания вала, и при этом может практически обеспечиваться аксиальная жесткая опора. Чем больше длина удерживания L, тем в большей мере решается проблема снижения прочности пластика при повышении температуры.
Обратимся к ФИГ.4В, иллюстрирующей аксиальную длину удерживания L консольного неподвижного вала в соответствии с настоящим изобретением. Возьмем как пример длину удерживания L консольного составного неподвижного вала 3а (показанного на ФИГ.1C), который описывается следующим образом. Защитная оболочка 41а типа II, представляющая собой чашевидную конструкцию, содержит заднее гнездо 418 вала, расположенное в центре нижней стороны, проходящее вовнутрь и в аксиальном направлении во внутреннем пространстве ярма 72 ротора и предназначенное для размещения в нем составного неподвижного вала 3а (показанного на ФИГ.1C). Заднее гнездо 418 вала представляет собой выпуклую конструкцию, имеющую отверстие 418а и выступающую из внутренней стороны, и представляет собой углубление 418b на наружной стороне. На внутренней кольцеобразной поверхности углубления 418b установлен комплект контроля 93. Уплотняющая поверхность 418d заднего гнезда 418 вала плотно прижата скользящей упорной поверхностью 331 керамической втулки 33 вала (показанной на ФИГ.1C), содержащей уплотнительное кольцо и контролирующую металлическую заднюю опору 821d составного вала заднего корпуса 82а электродвигателя.
Чем больше длина удерживания L, тем большие сила и момент могут переноситься. Предлагаемая конструкция составного неподвижного вала может решить проблему уменьшения прочности пластикового материала защитной оболочки 41а типа II при повышении температуры.
Обратимся к ФИГ.5А, иллюстрирующей несколько сил подшипника внутреннего ротора и их моментов на двусторонне опертом неподвижном валу в соответствии с настоящим изобретением. Возьмем как пример внутренний ротор 7, несущий несколько сил и их моментов на двусторонне опертом неподвижном валу 3 в соответствии с первым и третьим вариантами осуществления. Неподвижный вал 3 изготовлен из стойкого к коррозии и износостойкого керамического материала. Передний конец неподвижного вала 3 опирается на пластиковую треугольную переднюю опору 31, а задний конец неподвижного вала 3 поддерживается и фиксируется глухой задней опорой 413 вала, проходящей в аксиальном направлении. Прочность глухой задней опоры 413 вала обеспечивается контролирующей металлической задней опорой 821b вала и вспомогательным ярмом 91, плотно объединенными между собой. Центральная часть неподвижного вала 3 сопрягается с керамическим подшипником 79, который используется для поддержки вращения внутреннего ротора 7. Длина центральной части соответствует длине керамического подшипника 79 и оставляет пространство для свободного аксиального перемещения внутреннего ротора 7. При фактическом вращении внутреннего ротора 7 между керамическим подшипником 79 и задним упорным кольцом 414 существует заднее аксиальное свободное пространство А, между керамическим подшипником 79 и треугольной передней опорой 31 существует переднее аксиальное свободное пространство С, а между внутренним ротором 7 и защитной оболочкой 41 типа I существует аксиальный зазор В, показанные на фигурах как А, В, С. Вышеупомянутые зазоры (пространства) могут изменяться при износе поверхностей переднего упорного кольца 46, упорного подшипника 53, заднего упорного кольца 414 и керамического подшипника 79.
В большинстве случаев внутренний ротор 7 перемещается вперед под действием осевого усилия, прикладываемого рабочим колесом 5 типа I, чтобы привести переднее упорное кольцо 46 в сопряжение с упорным подшипником 53 для вращения с возможностью скольжения. Таким образом, аксиальная ширина переднего аксиального свободного пространства С должна быть больше суммы величины допуска на износ переднего упорного кольца 46 и упорного подшипника 53, а ширина аксиального зазора В соответственно увеличивается при уменьшении переднего аксиального свободного пространства С. Следует, однако, отметить, что если насос вращается в режиме высокого расхода и низкого напора, внутренний ротор 7 может перемещаться назад из-за аксиального количества движения текучей среды, чтобы привести заднее упорное кольцо 414 в сопряжение с керамическим подшипником 79 для вращения с возможностью скольжения, и при этом ширина заднего аксиального свободного пространства уменьшается до нуля.
Следовательно, ширина аксиального зазора В должна быть больше общей величины заднего аксиального свободного пространства А и износа поверхности керамического подшипника 79 и поверхности заднего упорного кольца, что предотвратит непосредственное касание внутреннего ротора 7 и защитной оболочки 41 типа I, приводящее к повреждению. Иными словами, расстояние аксиального свободного перемещения внутреннего ротора 7 равно сумме заднего аксиального свободного пространства А и переднего аксиального свободного пространства С, и поскольку величина деформации размера пластиковой защитной оболочки 41 типа I и корпуса 4 насоса обычно велика, зарезервированный размер зазора должен включать производственный допуск.
При вышеупомянутом режиме работы неподвижный вал 3 и его опорная конструкция должны нести несколько нагрузок, включая вес W внутреннего ротора, внецентренную центробежную силу Х, радиальную силу Р и моменты этих сил. Вес W внутреннего ротора - это сила, создаваемая весом внутреннего ротора 7. Внецентренная центробежная сила Х создается центроидой внутреннего ротора 7, являющейся результатом зазоров керамического подшипника 79. Радиальная сила Р, возникающая из-за неравномерного давления текучей среды проточного канала 47 корпуса 4 насоса, прикладывается на наружную поверхность рабочего колеса 5 типа I. Момент веса равен весу W внутреннего ротора, умноженному на длину плеча веса WL. Центробежный момент равен внецентренной центробежной силе X, умноженной на длину эксцентриситета XL. Момент радиальной силы равен радиальной силе Р, умноженной на длину плеча радиальной силы PL. Эти силы и моменты прикладываются на неподвижный вал 3. Прочность треугольной передней опоры 31, изготовленной из стойкой к коррозии пластмассы, при повышении температуры снижается, и поэтому большинство сил и моментов переносятся опорной конструкцией на заднем конце неподвижного вала 3. Внецентренная центробежная сила X, изменяющая при износе керамического подшипника 79, является самой главной переменной нагрузкой, прикладываемой на неподвижный вал 3. Чем больше величина износа, тем больше внецентренная центробежная сила Х. Второй по величине переменной нагрузкой, прикладываемой на неподвижный вал 3, является радиальная сила Р, возникающая из-за неравномерного давления текучей среды наружной поверхности рабочего колеса 5. Наибольшая длина плеча радиальной силы - от наружного диаметра рабочего колеса 5 до заднего конца неподвижного вала 3, что вызывает перекос между центром внутреннего ротора 7 и осью неподвижного вала 3, тем самым вызывая постоянное деформирование опорной конструкции. Поскольку проходящая в аксиальном направлении длина G значительно уменьшает длину плеча радиальной силы и длина удерживания L повышает несущую способность неподвижного вала 3 в части момента, проблема вышеупомянутых перекоса и деформации конструкции может быть уменьшена или решена и, следовательно, требование к прочности опорной конструкции треугольной передней опоры 31, расположенной на переднем конце неподвижного вала 3, может быть значительно уменьшено.
Обратимся к ФИГ.5В, иллюстрирующей несколько сил подшипника внутреннего ротора и их моментов на односторонне опертом консольном неподвижном валу в соответствии с настоящим изобретением. Возьмем как пример несколько сил подшипника внутреннего ротора 7 и их моментов на односторонне опертом составном неподвижном валу 3а в соответствии со вторым и четвертым вариантами осуществления. Составной неподвижный вал 3а выполнен из металлического вала 32 и керамической втулки 33 вала. Когда конец составного неподвижного вала 3а установлен на контролирующей металлической задней опоре 821d составного вала заднего корпуса 82 электродвигателя, может достигаться требуемая прочность опоры. Металлический вал 32 проходит через центральное отверстие 332 керамической втулки 33 вала, а конец круглой головка 321 плотно прижат к передней торцевой поверхности 333 керамической втулки 33 вала. Зубчатая часть 323 металлического вала 32 проходит через заднее гнездо 418 вала защитной оболочки 41а типа II и центральное отверстие контролирующей металлической задней опоры 821d составного вала и соединена с задним корпусом 82 электродвигателя металлическим валом 32. Поверхность скользящей упорной поверхности 331 керамической втулки 33 вала может быть плотно прижатой к поверхности контролирующей металлической задней опоры 821d составного вала, и при этом образуется составной неподвижный вал 3а с высокой жесткостью.
Составной неподвижный вал 3а, длина которого соответствует требованию к длине для керамического подшипника 79, сопрягается с керамическим подшипником 79 для поддержки вращения внутреннего ротора 7 и оставляет пространство для аксиального свободного перемещения внутреннего ротора 7, такое как А, В. При фактическом вращении внутреннего ротора 7 между керамическим подшипником 79 и задним упорным кольцом 414 существует заднее аксиальное свободное пространство А, между внутренним ротором 7 и защитной оболочкой 41а типа II существует аксиальный зазор. Два вышеупомянутых зазора изменяются при износе переднего упорного кольца 46, упорного подшипника 53, заднего упорного кольца 414 и керамического подшипника 79. Перемещается вперед под действием осевого усилия, прикладываемого рабочим колесом 5 типа II, чтобы привести переднее упорное кольцо 46 в сопряжение с упорным подшипником 53 для вращения с возможностью скольжения. При этом ширина аксиального зазора В соответственно увеличивается. При работе насоса в режиме высокого расхода и низкого напора внутренний ротор 7 перемещается назад из-за аксиального количества движения текучей среды, которое приводит заднее упорное кольцо 414 в сопряжение с керамическим подшипником 79 для вращения с возможностью скольжения, и при этом ширина заднего аксиального свободного пространства уменьшается до нуля. Следовательно, ширина аксиального зазора В должна быть больше суммы заднего аксиального свободного пространства А и величины износа поверхности керамического подшипника 79 и заднего упорного кольца 414, что предотвратит непосредственное касание внутреннего ротора 7 и защитной оболочки 41 типа, приводящее к повреждению. Иными словами, заднее аксиальное свободное пространство А меняется в соответствии с аксиальным свободным перемещением внутреннего ротора 7, и поскольку величина деформации размера пластиковой защитной оболочки 41 типа II обычно велика, каждый из зарезервированных размеров зазора должен включать производственный допуск.
При вышеупомянутом режиме работы неподвижный вал 3а и его опорная конструкция должны нести несколько нагрузок, включая вес W внутреннего ротора, внецентренную центробежную силу X, радиальную силу Р и моменты этих сил. Вес W внутреннего ротора - это сила, создаваемая весом внутреннего ротора 7. Внецентренная центробежная сила Х создается центроидой внутреннего ротора 7, являющейся результатом зазоров керамического подшипника 79. Радиальная сила Р, возникающая из-за неравномерного давления текучей среды проточного канала 47 металлического корпуса 4а, прикладывается на наружную поверхность рабочего колеса 5а типа II. Момент веса равен весу W внутреннего ротора, умноженному на длину плеча веса WL. Центробежный момент равен внецентренной центробежной силе Х, умноженной на длину эксцентриситета XL. Момент радиальной силы равен радиальной силе Р, умноженной на длину плеча радиальной силы PL. Эти силы и моменты прикладываются на неподвижный вал 3а и несутся металлической составной опорой. Внецентренная центробежная сила Х, изменяющая при износе керамического подшипника 79, является самой главной переменной нагрузкой, прикладываемой на неподвижный вал 3а. Чем больше величина износа, тем больше внецентренная центробежная сила X. Второй по величине переменной нагрузкой, прикладываемой на неподвижный вал 3а, является радиальная сила Р, возникающая из-за неравномерного давления текучей среды наружной поверхности рабочего колеса 5. Наибольшая длина плеча радиальной силы - от наружного диаметра рабочего колеса 5 до заднего конца составного неподвижного вала 3а, что вызывает перекос между центром внутреннего ротора 7 и осью неподвижного вала 3а, тем самым вызывая постоянное деформирование опорной конструкции. Поскольку проходящая в аксиальном направлении длина G значительно уменьшает длину плеча радиальной силы и длина удерживания L повышает несущую способность неподвижного вала 3 в части момента, проблема вышеупомянутых перекоса и деформации конструкции может быть уменьшена или решена.
Пятый вариант осуществления: устройство контроля экранированного электронасоса для обнаружения износа подшипника, ФИГ.6А, 6В, 6С, 6D.
Обратимся к ФИГ.6А, представляющей собой радиальный разрез устройства контроля для обнаружения износа подшипника электродвигателя в соответствии с настоящим изобретением. На этой фигуре как пример, взята конструкция с восемью полюсами и восемью катушками, но этой конструкцией настоящее изобретение не ограничивается. Добиться такого же эффекта могут другие конструкции или способы в соответствии с другими вариантами осуществления.
Устройство контроля 9 содержит несколько вспомогательных магнитов 73 и комплект контроля 93. Вспомогательные магниты 73 собраны на одном конце внутренней стороны ярма 72 внутреннего ротора 7 вблизи нижней стороны защитной оболочки 41 типа I и обращены в сторону от основных магнитов 71.
Число вспомогательных магнитов 73 равно числу основных магнитов 71, но размер вспомогательных магнитов 73 менее одной десятой основных магнитов 71, и площадь и толщина вспомогательных магнитов 73, по меньшей мере, обеспечивают магнитодвижущую силу (MFC) и магнитный поток, требуемый парами сигнальных катушек. В данном случае окружность внутреннего ротора 7 разделена на восемь частей по числу вспомогательных магнитов 73, и каждая из них имеет электрический прилежащий угол 180 градусов и телесный внутренний угол 45 градусов. Основные силовые линии магнитного поля выходят с поверхности магнита прямого потока 71а и проходят через магнитный зазор 98 электродвигателя к зубьям 83а статора 83, далее к соседним зубьям 83с статора через ярмо 83b статора и снова проходят через магнитный зазор 98 электродвигателя, затем в первоначальный соседний магнит обратного потока 71b и возвращаются к исходному магниту прямого потока 71а через ярмо 72 ротора, то есть образуется магнитный путь 96а ярма статора (далее по тексту именуемый основным магнитным контуром).
Вспомогательные силовые линии магнитного поля выходят с поверхности вспомогательного магнита прямого потока 73а во вспомогательное ярмо 91 через контролирующую магнитный зазор 97 и через вспомогательное ярмо 92 снова проходят через контролирующую магнитный зазор 97 и обратно в первоначальный соседний вспомогательный магнит обратного потока 73b и еще один вспомогательный магнит обратного потока 73с соответственно и возвращаются к исходному вспомогательному магниту 73а через ярмо 72 ротора, то есть образуется магнитный путь 96 ярма ротора (далее по тексту именуемый вспомогательным магнитный контуром), и этот вспомогательный магнитный контур проходит через устройство контроля. Таким образом, в ярме 72 ротора сосуществуют основной магнитный контур и вспомогательный магнитный контур. То есть, силовые линии магнитного поля устройства контроля 9 проходят через ярмо 72 ротора, не претерпевая возмущение. При вращении внутреннего ротора 7 устройство контроля 9, пересекая вспомогательные силовые линии магнитного поля, выдает сигнал магнитодвижущей силы (т.е., сигнал напряжения), т.е. сигнал напряжения является независимым и помехи от внешнего напряжения исключены.
Комплект контроля 93 содержит вспомогательное ярмо 91 и несколько пар сигнальных катушек 92. Несколько пар сигнальных катушек 92, установленных на поверхности вспомогательного ярма 91, содержат передние пары сигнальных катушек 92а и задние пары сигнальных катушек 92b, которые проходят в аксиальном направлении и расположены вплотную рядом друг с другом и выровнены относительно центра 73g вспомогательных магнитов (показанного на ФИГ.6С). Кроме того, пары сигнальных катушек 92 разделены по окружности на две группы катушек - сигнальные катушки α и сигнальные катушки β. Каждая из этих групп имеет две пары сигнальных катушек, соответствующих друг другу в радиальном направлении 180 градусов. Восемь сигнальных катушек, среди которых сигнальная катушка α11, сигнальная катушка α12, сигнальная катушка α21, сигнальная катушка α22, сигнальная катушка β11, сигнальная катушка β12, сигнальная катушка β21, сигнальная катушка β22, имеют одинаковый размер, и разность между электрическим внутренним углом сигнальных катушек α и сигнальных катушек β равна 90 градусов (или 270 градусов), и разность между пространственным внутренним углом Θ сигнальных катушек α и сигнальных катушек β равна 112,5 градусов (или 67,5 градусов). Передние пары сигнальных катушек 92а содержат сигнальную катушку α11, сигнальную катушку α21 сигнальную катушку β11 и сигнальную катушку β21. Задние пары сигнальных катушек 92b содержат сигнальную катушку α12, сигнальную катушку α22, сигнальную катушку β12 и сигнальную катушку β22. Позиционирование электрических внутренних углов и телесных внутренних углов вышеупомянутых пар сигнальных катушек 92 получено с помощью точки совмещения 911 магнитов (показанной на ФИГ.6С) заднего конца 91b вспомогательного ярма 91. Точка совмещения 911 магнитов совпадает с центром сигнальных катушек α11, и если электрический внутренний угол точки совмещения 911 магнитов равен 90 градусов и пространственный внутренний угол точки совмещения 911 магнитов равен 22,5 градусов, это преимущественно для ремонта и замены комплекта контроля 93.
Длина вспомогательного ярма 91 кольцеобразной формы независимого устройства контроля 9 больше суммы аксиальной длины ярма 72 ротора и длины аксиального перемещения внутреннего ротора 7 и больше суммарной аксиальной длины пар сигнальных катушек 92 (включая предельное значение износа упорного подшипника). Ширина окружности пар сигнальных катушек 92 не более электрического внутреннего угла 180 градусов. Передний конец 91а вспомогательного ярма и задний конец 91b вспомогательного ярма полностью закрывают пары сигнальных катушек 92, благодаря чему при перемещении внутреннего ротора 7 в аксиальном направлении силовые линии магнитного поля магнитного пути 96 ярма ротора вспомогательных магнитов могут по-прежнему быть устойчивыми, а также предотвращать деформацию и изгиб, тем самым обеспечивая устойчивость и линейность сигнала напряжения пар сигнальных катушек 92. При перемещении внутреннего ротора 7 как в радиальном, так и аксиальном направлениях получаются дифференциальные сигналы напряжения пар сигнальных катушек 92. Дифференциальные сигналы напряжения различных сочетаний пар сигнальных катушек могут представлять аксиальное перемещение или радиальное перемещение. Если величина перемещения превышает аксиальное свободное пространство или зазор керамического подшипника 79, это свидетельствует о том, что произошел износ подшипника и величину износа можно рассчитать. Если перемещение превышает величину, требующую предупреждения об износе, должно передаваться уведомление об износе, и при превышении перемещением предельной величины износа работа насоса должна быть остановлена.
Обратимся к ФИГ.6В, 6С и 6D. ФИГ.6В представляет собой аксиальный разрез устройства контроля для обнаружения износа подшипника электродвигателя в соответствии с настоящим изобретением; ФИГ.6С представляет собой схематический вид устройства контроля для обнаружения износа подшипника, использующего восемь пар сигнальных катушек в соответствии с настоящим изобретением; и ФИГ.6D представляет собой схематический вид в перспективном изображении устройства контроля для обнаружения износа подшипника в соответствии с настоящим изобретением. Эти фигуры показывают фактический порядок расположения пар сигнальных катушек устройства контроля для обнаружения износа подшипника и способ расчета сигналов напряжения. На фигурах как пример взята конструкция с восемью полюсами и восемью катушками, но этой конструкцией настоящее изобретение не ограничивается. Добиться такого же эффекта могут другие конструкции или способы в соответствии с другими вариантами осуществления. Устройство контроля 9 содержит восемь пар сигнальных катушек 92, среди которых сигнальная катушка α11, сигнальная катушка α12, сигнальная катушка α21, сигнальная катушка α22, сигнальная катушка β11, сигнальная катушка β12, сигнальная катушка β21 сигнальная катушка β22. При вращении внутреннего ротора 7 между вспомогательными магнитами 73 и парой сигнальных катушек 92а образуется вращающееся магнитное поле и выдаются сигналы напряжения, и эти сигналы напряжения могут рассчитываться методом d-q и преобразуются в аксиальное и радиальное перемещения внутреннего ротора 7, которые могут быть критерием износа подшипника. Соответствующее описание приведено ниже:
Сигналы восьми пар сигнальных катушек устройства контроля 9 принимают среднее значение как значения сигналов, которые равны:


Поскольку на вышеупомянутые сигналы среднего значения аксиальный износ и радиальный износ подшипника не влияют; и разность электрических внутренних углов сигналов eαT и eβT равна 90 градусов. Предположим, что формулы для еαT и eβT имеют следующий вид:


В вышеприведенных формулах ωr - частота вращения, λmT - потокосцепление между вспомогательными магнитами 73 и парами сигнальных катушек 92, θr-f - относительные угловые положения вспомогательных магнитов между сигнальными катушками α и β устройства контроля 9. ωr и θr-f из вышеприведенных формул (2) и (3) можно рассчитать следующим образом:


где 

где Np - количество полюсов, в этом варианте осуществления 

Для того чтобы рассчитать аксиальный износ и радиальный износ подшипника, каждый сигнал пар сигнальных катушек 92 вводится в матрицы преобразования для преобразования этих сигналов в координаты осей d-q, как показано ниже:









Как критерии аксиального перемещения и износа подшипника берется большее из следующих двух значений разности:


Как критерии радиального перемещения и износа подшипника берется большее из следующих двух значений разности:


Как общие критерии радиального перемещения, аксиального перемещения и износа подшипника берется большее из следующих двух значений разности:


По вышеприведенным формулам можно рассчитать внецентренное перемещение и угловое положение внутреннего ротора 7, то есть путь фактического перемещения центра инерции внутреннего ротора.
Шестой вариант осуществления: устройство контроля для обнаружения износа подшипника экранированного электронасоса, ФИГ.6Е.
Обратимся к ФИГ.6Е, представляет собой схематический вид устройства контроля для обнаружения износа подшипника, использующего четыре пары сигнальных катушек в соответствии с настоящим изобретением. По сравнению с пятым вариантом осуществления, число пар сигнальных катушек 92 устройства контроля 9 для обнаружения износа подшипника в соответствии с этим вариантом осуществления уменьшено до четырех. На этой фигуре как пример взята конструкция с восемью полюсами и четырьмя катушками, но этой конструкцией настоящее изобретение не ограничивается. Добиться такого же эффекта могут другие конструкции или способы в соответствии с другими вариантами осуществления. Площадь и толщина вспомогательных магнитов 73, по меньшей мере, обеспечивают магнитодвижущую силу (MMF) и магнитный поток, требуемый парами сигнальных катушек. Комплект контроля 93 содержит вспомогательное ярмо 91 и несколько пар сигнальных катушек 92. В данном случае окружность внутреннего ротора 7 разделена на восемь частей по числу вспомогательных магнитов 73, и каждая из них имеет электрический прилежащий угол 180 градусов и телесный внутренний угол 45 градусов. Пары сигнальных катушек 92 разделены на две группы: сигнальные катушки α и сигнальные катушки β. Сигнальные катушки α содержат сигнальную катушку α1 и сигнальную катушку α2, а сигнальные катушки β содержат сигнальную катушку β1 и сигнальную катушку β2. Разности электрического внутреннего угла и телесного внутреннего угла между сигнальными катушками α и β равны 90 градусов (или 270 градусов) и 112,5 градусов (или 67,5 градусов) соответственно.
Каждая из этих групп имеет две пары сигнальных катушек, соответствующих друг другу в радиальном направлении 180 градусов. Сигнальные катушки α1, α2, β1 и β2 имеют одинаковый размер, и аксиальная длина каждой из катушек α1, α2, β1 и β2 не менее суммы длины вспомогательных магнитов 73 и длины аксиального свободного перемещения внутреннего ротора 7 (включая предельное значение износа упорных подшипников), и ширина окружности каждой из сигнальных катушек не более электрического внутреннего угла 180 градусов. Передние концы каждой из сигнальных катушек α1 и β2 совпадают с передним концом 91а вспомогательного ярма 91. Задние концы каждой из сигнальных катушек α1 и β2 совпадают с задним концом 73f вспомогательных магнитов 73. Передние концы каждой из сигнальных катушек α2 и β1 совпадают с передним концом 73е вспомогательных магнитов 73. Задние концы каждой из сигнальных катушек α2 и β1 совпадают с задним концом 91b вспомогательного ярма 91. Иными словами, сигнальные катушки α1, α2, β1 и β2 в аксиальном направлении расположены вразбежку и в аксиальном направлении совпадают с передними и задними концами вспомогательных магнитов 73. Положения электрического угла и пространственного угла вышеупомянутых пар сигнальных катушек 92 получаются с помощью точки совмещения 911 магнитов, расположенной на заднем конце 91b вспомогательного ярма 91 и соответствующей центру сигнальных катушек α1.
Электрический угол и телесный угол точки совмещения 911 магнитов равны 90 градусов и 22,5 градусов соответственно, что преимущественно для удобного ремонта и замены комплекта контроля 93. Аксиальная длина вспомогательного ярма 91 больше суммарной аксиальной длины расположенных пар сигнальных катушек 92, и передний конец 91а вспомогательного ярма и задний конец 91b вспомогательного ярма могут полностью закрывать пары сигнальных катушек 92 для обеспечения того, что при перемещении внутреннего ротора 7 в аксиальном направлении силовые линии магнитного поля вспомогательного магнитного контура вспомогательных магнитов 73 могут быть устойчивыми без деформации или изгиба, устойчиво оставаясь не возмущенными на поверхности вспомогательного ярма 91, тем самым обеспечивая устойчивость и линейность сигнала напряжения пар сигнальных катушек 92. Аксиальное перемещение и радиальное перемещение внутреннего ротора 7 можно рассчитать по значению разности этих сигналов напряжения пар сигнальных катушек 92. Если величина перемещения превышает аксиальное свободное пространство или зазор керамического подшипника 79, это свидетельствует о том, что произошел износ подшипника и величину износа можно рассчитать. Если перемещение превышает величину, требующую предупреждения об износе, должно передаваться уведомление об износе, и при превышении перемещением предельной величины износа работа насоса должна быть остановлена.
Сигналы четырех пар сигнальных катушек устройства контроля 9 принимают среднее значение как значения сигналов, которые равны:


Поскольку на вышеупомянутые сигналы среднего значения аксиальный износ и радиальный износ подшипника не влияют; и разность электрических внутренних углов сигналов eαT и eβT равна 90 градусов. Предположим, что формулы для eαT и eβT имеют следующий вид:


В вышеприведенных формулах ωr - частота вращения, λmT - потокосцепление между вспомогательными магнитами 73 и парами сигнальных катушек 92, θr-f - относительные угловые положения вспомогательных магнитов между сигнальными катушками α и β устройства контроля ωr и θr-f из вышеприведенных формул (14) и (15) можно рассчитать следующим образом:


где 
Механическую частоту вращения и относительное механическое угловое положение можно определить по следующим формулам:

где Nр - количество полюсов, в этом варианте осуществления 

Для того чтобы рассчитать аксиальный износ и радиальный износ подшипника, каждый сигнал пар сигнальных катушек 92 вводится в матрицы преобразования для преобразования этих сигналов в координаты осей d-q, как показано ниже:









Как критерии аксиального перемещения и износа подшипника берется следующее значение разности:

Как критерии радиального перемещения и износа подшипника берется следующее значение разности:

Общими критериями радиального перемещения, аксиального перемещения и износа подшипника можно считать εα и εr.
По вышеприведенным формулам можно рассчитать внецентренное перемещение и угловое положение внутреннего ротора 7, то есть путь фактического перемещения центра инерции внутреннего ротора.
Седьмой вариант осуществления: экранированный электронасос, содержащий датчик Холла, ФИГ.7.
Обратимся к ФИГ.7, представляющей собой схематический вид устройства контроля экранированного электронасоса, содержащего три датчика Холла, в соответствии с настоящим изобретением. На этой фигуре как пример взято составное устройство контроля 9, содержащее три датчика Холла 94 с восемью полюсами и четырьмя сигнальными катушками, но этой конструкцией настоящее изобретение не ограничивается. Добиться такого же эффекта могут и другие конструкции. Сигнальные катушки разделены на две группы: сигнальные катушки α и сигнальные катушки β. Сигнальные катушки α содержат сигнальную катушку α1 и сигнальную катушку α2, а сигнальные катушки β содержат сигнальную катушку β1 и сигнальную катушку β2. Электрический внутренний угол между сигнальными катушками α и β равен 90 градусов (270 градусов), а телесный внутренний угол Θ между сигнальными катушками α и β равен 112,5 градусов (67,5 градусов). Сигнальные катушки α1, α2, β1 и β2 имеют одинаковый размер, и аксиальная длина каждой из катушек α1, α2, β1 и β2 не менее суммы длины вспомогательных магнитов 73 и длины аксиального свободного перемещения внутреннего ротора 7 (включая предельное значение износа упорных подшипников), и ширина окружности каждой из сигнальных катушек не более электрического внутреннего угла 180 градусов. Передние концы каждой из сигнальных катушек α1 и β2 совпадают с передним концом 91а вспомогательного ярма 91. Задние концы каждой из сигнальных катушек α1 и β2 совпадают с задним концом 73f вспомогательных магнитов 73.
Передние концы каждой из сигнальных катушек α2 и β1 совпадают с передним концом 73е вспомогательных магнитов 73. Задние концы каждой из сигнальных катушек α2 и β1 совпадают с задним концом 91b вспомогательного ярма 91. Иными словами, сигнальные катушки α1, α2, β1 и β2 в аксиальном направлении расположены вразбежку и в аксиальном направлении совпадают с передними и задними концами вспомогательных магнитов 73.
Положения электрического угла и телесного угла вышеупомянутых пар сигнальных катушек 92 получаются с помощью точки совмещения 911 магнитов, расположенной на заднем конце 91b вспомогательного ярма 91 и соответствующей центру сигнальных катушек α1. Электрический угол и телесный угол точки совмещения 911 магнитов равны 90 градусов и 22,5 градусов соответственно, что преимущественно для удобного ремонта и замены комплекта контроля 93.
Разности электрических внутренних углов и телесных внутренних углов трех датчиков Холла 94 равны 120 градусов и 30 градусов соответственно. Датчик Холла 94, расположенный в центральном положении среди трех, установлен во внутреннем центре сигнальных катушек α2, и электрический внутренний угол и телесный внутренний угол центрального датчика Холла 94 равны 90 градусов и 202,5 градусов соответственно. Другие два датчика Холла 94, разность электрического внутреннего угла которых равна 120 градусов, установлены на двух противоположных сторонах наружной поверхности сигнальных катушек α2 соответственно.
Аксиальная длина вспомогательного ярма 91 больше суммарной аксиальной длины расположенных пар сигнальных катушек 92, и передний конец 91а вспомогательного ярма и задний конец 91b вспомогательного ярма могут полностью закрывать пары сигнальных катушек 92 для обеспечения того, что при перемещении внутреннего ротора 7 в аксиальном направлении силовые линии магнитного поля вспомогательного магнитного контура вспомогательных магнитов 73 могут быть устойчивыми без деформации или изгиба, устойчиво оставаясь не возмущенными на поверхности вспомогательного ярма 91, тем самым обеспечивая устойчивость и линейность сигнала напряжения пар сигнальных катушек 92. Аксиальное перемещение и радиальное перемещение внутреннего ротора 7 можно рассчитать по значению разности этих сигналов напряжения пар сигнальных катушек 92. Если величина перемещения превышает аксиальное свободное пространство или зазор керамического подшипника 79, это свидетельствует о том, что произошел износ подшипника и величину износа можно рассчитать. Если перемещение превышает величину, требующую предупреждения об износе, должно передаваться уведомление об износе, и при превышении перемещением предельной величины износа работа насоса должна быть остановлена.
Способ расчета износа подшипника такой же, как в шестом варианте осуществления. При вращении и аксиальном перемещении внутреннего ротора 7 силовые линии магнитного поля вспомогательного магнитного контура устойчивы без деформации или изгиба для обеспечения устойчивости сигнала напряжения датчиков Холла 94, и при этом обеспечивается привод, включающий устройство контроля 9, для привода экранированного электронасоса.
Вышеприведенное описание примерных вариантов осуществления изобретения представлено лишь в целях иллюстрации и описания и не преследует цель быть исчерпывающим или ограничивающим объем настоящего изобретения конкретными раскрытыми формами. В свете вышеприведенных идей возможны многочисленные модификации и изменения.
Эти варианты осуществления были выбраны и описаны для объяснения принципов изобретения и их практического применения с тем, чтобы побудить других специалистов в данной области к использованию изобретения и различных вариантов и с различными модификациями, подходящими для конкретного намеченного использования. Специалистам в области, к которой относится настоящее изобретение, станут очевидными альтернативные варианты осуществления в пределах его сущности и объема. Соответственно, объем настоящего изобретения определяется прилагаемой формулой изобретения, а не вышеприведенным описанием и примерными вариантами осуществления, описанными в нем.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСОВЕРШЕНСТВОВАНИЕ КОНСТРУКЦИИ ЭКРАНИРОВАННОГО ЭЛЕКТРОНАСОСА (ВАРИАНТЫ) | 2010 |
|
RU2419948C1 |
| ГЕРМЕТИЧНЫЙ ЭЛЕКТРОНАСОС С ПРИВОДОМ НА ПОСТОЯННЫХ МАГНИТАХ С КОРПУСОМ, ЗАЩИЩЕННЫМ ОТ КОРРОЗИИ | 2012 |
|
RU2540320C9 |
| НАСОС С МАГНИТНЫМ ПРИВОДОМ | 2012 |
|
RU2534195C2 |
| СТИРАЛЬНАЯ МАШИНА | 2012 |
|
RU2575860C2 |
| СТИРАЛЬНАЯ МАШИНА | 2012 |
|
RU2563773C1 |
| СТИРАЛЬНАЯ МАШИНА | 2012 |
|
RU2569768C1 |
| МЕХАНИЧЕСКИЙ АККУМУЛЯТОР ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ | 2003 |
|
RU2249288C2 |
| ЭЛЕКТРОННО-КОММУТИРУЕМЫЙ СИНХРОННЫЙ РЕАКТИВНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1995 |
|
RU2198459C2 |
| КОМБИНИРОВАННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ - ГРЕБНОЙ ВИНТ | 1996 |
|
RU2115590C1 |
| ИНДУКТОРНАЯ МАШИНА С АКСИАЛЬНЫМ МАГНИТНЫМ ПОТОКОМ ДЛЯ ЖЕСТКИХ УСЛОВИЙ ЭКСПЛУАТАЦИИ | 2013 |
|
RU2539572C2 |










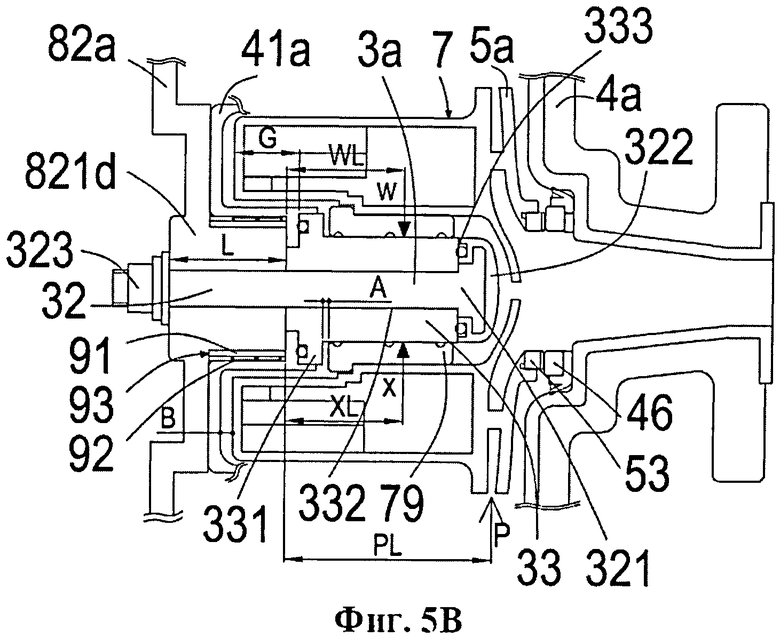
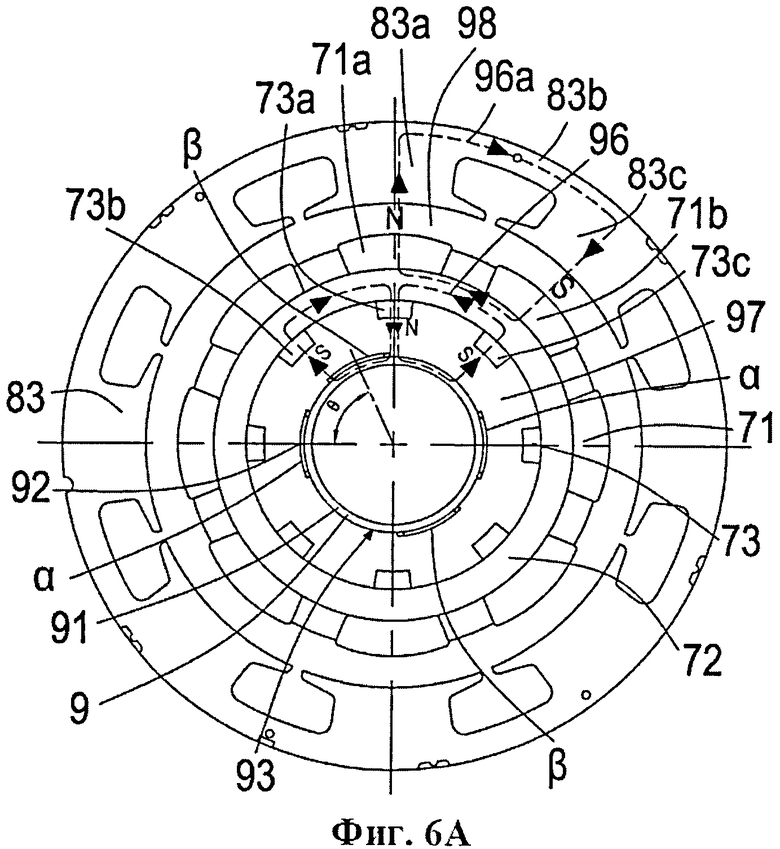





Изобретение относится к бессальниковому экранированному электронасосу, в частности, стойкому к коррозии и содержащему устройство контроля подшипника. Технический результат заключается в повышении жесткости неподвижного вала экранированного электронасоса с двигателем на постоянных магнитах, своевременном обнаружении износа подшипника, повышении срока службы. Конструктивное усовершенствование экранированного электронасоса заключается в повышении жесткости неподвижного вала и, при необходимости, установке устройства контроля. Способ повышения жесткости неподвижного вала включает следующие стадии: стадию, на которой во внутреннюю сторону ярма ротора внутреннего ротора экранированного электродвигателя в аксиальном направлении вставляют металлическую заднюю опору вала металлической конструкции заднего корпуса экранированного электродвигателя, стадию, на которой металлическую заднюю опору вала плотно прикрепляют к заднему гнезду вала для повышения жесткости неподвижного вала за счет большей длины удерживания и для укорачивания длины плеча равнодействующей силы. Устройство контроля, предназначенное для обнаружения износа подшипника, в целях повышения надежности и выполнения требований в части привода установлено в кольцевом пазу, которое будет защищено задним гнездом вала. 6 н. и 17 з.п. ф-лы, 18 ил.
1. Электронасос с двигателем на постоянных магнитах, представляющий собой конструкцию с двусторонне опертым неподвижным валом без устройства контроля и содержащий: корпус насоса, треугольную переднюю опору, рабочее колесо, защитную оболочку, неподвижный вал и электродвигатель, отличающийся тем, что:
корпус насоса содержит входное отверстие, выходное отверстие и проточный канал и используется для размещения в нем рабочего колеса, переднее упорное кольцо, установленное на внутренней стороне входного отверстия корпуса насоса, используется для сопряжения с упорным подшипником рабочего колеса для образования вместе аксиального упорного подшипника;
треугольная передняя опора, соединенная с входным отверстием корпуса насоса, проходит через отверстие ступицы в аксиальном направлении для поддержки конца неподвижного вала;
в корпусе насоса собрано рабочее колесо, треугольная передняя опора проходит через отверстие ступицы в аксиальном направлении и используется для поддерживания конца неподвижного вала, ступица используется для объединения с проходящей в аксиальном направлении частью внутреннего ротора электродвигателя, при этом рабочее колесо и внутренний ротор составляют единое целое или встроены для объединения в единое целое;
защитная оболочка представляет собой чашевидную конструкцию, содержащую глухую заднюю опору вала, расположенную на нижней стороне защитной оболочки, в глухой задней опоре вала с кольцевым пазом нет сквозного отверстия, заднее упорное кольцо установлено на передней поверхности отверстия для удерживания вала и используется для сопряжения с подшипником внутреннего ротора для образования аксиального упорного подшипника; фланец оболочки расположен на передней стороне защитной оболочки и объединен с корпусом насоса и фланцем насоса электродвигателя; колонная часть оболочки расположена на боковой стороне защитной оболочки и проходит через внутреннюю сторону статора с неплотной скользящей посадкой, задний корпус электродвигателя плотно объединен с нижней стороной;
причем в защитной оболочке:
глухая задняя опора вала установлена в центре нижней стороны и проходит вовнутрь и в аксиальном направлении во внутреннее пространство ярма ротора; глухая задняя опора вала содержит отверстие для удерживания вала, проходящее вовнутрь, и кольцевой паз, выполненный на наружной стороне глухой задней опоры вала, наружная боковая поверхность отверстия для удерживания вала полностью объединена с металлической задней опорой вала и поддерживается ею для образования металлической удерживающей опоры;
неподвижный вал, представляющий собой двусторонне опертую конструкцию, изготовлен из керамического материала, передняя сторона неподвижного вала опирается на треугольную переднюю опору, а задняя сторона неподвижного вала поддерживается глухой задней опорой вала, проходящей наружу, неподвижный вал сопрягается с подшипником для поддержки вращения внутреннего ротора, и длина центральной части неподвижного вала соответствует требуемой длине подшипника для выдерживания равнодействующей силы, переносимой внутренним ротором;
электродвигатель содержит статор, корпус электродвигателя, задний корпус электродвигателя и внутренний ротор;
статор плотно закреплен в корпусе электродвигателя, на статор намотаны обмотки, электрическое напряжение с широтно-импульсной модуляцией прикладывается к обмоткам и создает магнитный поток для взаимодействия с магнитным полем внутреннего ротора для создания крутящего момента и привода рабочего колеса, защитная оболочка предотвращает коррозию обмоток статора от агрессивной текучей среды;
корпус электродвигателя имеет фланец насоса, используемый для плотного соединения с фланцем оболочки и корпусом насоса для предотвращения утечки агрессивной текучей среды, задний фланец корпуса электродвигателя используется для соединения заднего корпуса электродвигателя с металлической задней опорой вала;
задний корпус электродвигателя прикреплен на заднем фланце корпуса электродвигателя, причем задний корпус электродвигателя характеризуется тем, что:
металлическая задняя опора вала расположена в центре заднего корпуса электродвигателя; и
внутренний ротор, установленный во внутреннем пространстве защитной оболочки, представляет собой кольцеобразную конструкцию, содержащую основные магниты, ярмо ротора и проходящую в аксиальном направлении часть, основные магниты установлены на наружной поверхности ярма ротора, внутренний ротор покрыт техническим пластиком, стойким к коррозии, керамический подшипник установлен в центральном отверстии внутреннего ротора для сопряжения с неподвижным валом, проходящая в аксиальном направлении часть объединена со ступицей рабочего колеса; причем во внутреннем роторе внутреннее пространство ярма ротора содержит глухую заднюю опору вала защитной оболочки и металлическую заднюю опору вала заднего корпуса электродвигателя, проходящие вовнутрь и в аксиальном направлении во внутреннем пространстве.
2. Электронасос с двигателем на постоянных магнитах по п.1, отличающийся тем, что длина ярма ротора увеличена, чтобы соответствовать длине подшипника.
3. Электронасос с двигателем на постоянных магнитах по п.1, отличающийся тем, что длина удерживания содержит общую длину вспомогательного ярма, установленного на металлической задней опоре вала.
4. Электронасос с двигателем на постоянных магнитах, представляющий собой конструкцию с односторонне опертым консольным неподвижным валом без устройства контроля и содержащий: корпус насоса, рабочее колесо, защитную оболочку, составной неподвижный вал и электродвигатель, отличающийся тем, что:
корпус насоса, содержащий входное отверстие, выходное отверстие и проточный канал, используется для размещения в нем рабочего колеса, входное отверстие корпуса насоса и еще одно входное отверстие рабочего колеса образуют гладкий канал с увеличивающимся внутренним диаметром без какого-либо возмущения, корпус насоса представляет собой металлическую конструкцию, полученную литьем, облицовка корпуса изготовлена из стойкого к коррозии пластика и нанесена на внутренней стороне корпуса насоса, переднее упорное кольцо установлено во входном отверстии на внутренней стороне корпуса насоса и используется для сопряжения с упорным подшипником рабочего колеса для образования аксиального упорного подшипника;
в корпусе насоса установлено рабочее колесо, и ступица используется для объединения с проходящей в аксиальном направлении частью внутреннего ротора, так что рабочее колесо и внутренний ротор составляют единое целое или встроены для объединения в единое целое, отверстие в ступице представляет собой отверстие в центре кривой ступицы для обеспечения повторной циркуляции циркулирующей текучей среды;
защитная оболочка представляет собой чашевидную конструкцию, на нижней стороне имеет заднее гнездо вала с отверстием и углублением на наружной стороне, фланец оболочки находится на передней стороне и объединен с корпусом насоса и фланцем насоса корпуса электродвигателя, что предотвращает утечку текучей среды; колонная часть оболочки находится на боковой стороне и проходит через внутреннюю сторону статора с неплотной скользящей посадкой, и нижняя сторона плотно объединена с задним корпусом электродвигателя; причем защитная оболочка характеризуется тем, что:
заднее гнездо вала находится в центре на нижней стороне защитной оболочки и проходит вовнутрь в сторону внутреннего пространства ярма ротора; заднее гнездо вала объединено с составной металлической задней опорой вала для образования металлической составной опоры, и уплотняющая поверхность заднего гнезда вала плотно объединена поверхностью керамической гильзы вала, включая уплотнительное кольцо и составную металлическую заднюю опору вала, во избежание утечки;
составной неподвижный вал представляет собой консольно опертую конструкцию и выполнен из керамической втулки вала, металлического вала и заднего корпуса электродвигателя, конец составного неподвижного вала установлен на металлическую заднюю опору составного вала заднего корпуса электродвигателя, сопрягается с подшипником для поддержки вращения внутреннего ротора, и длина центральной части составного неподвижного вала соответствует длине подшипника для выдерживания равнодействующей силы, переносимой внутренним ротором; причем составной неподвижный вал характеризуется тем, что:
металлический вал проходит через центральное отверстие керамической втулки вала и содержит круглую головку, расположенную на конце металлического вала, покрытую смоляной оболочкой и плотно прижатую к передней поверхности конца втулки вала, зубчатая часть металлического вала проходит через заднее гнездо вала защитной оболочки и центральное отверстие составной металлической задней опоры вала заднего корпуса, проходящего вовнутрь в радиальном направлении, гайка зубчатой части прикреплена на заднем корпусе, и при этом два конца керамических втулок вала плотно прижаты к круглой головке и составной металлической задней опоре вала для образования высокожесткого составного неподвижного вала; скользящая упорная поверхность керамической втулки вала плотно прижата к поверхности составной металлической задней опоры вала, и два уплотнительных кольца установлены на обоих концах керамической втулки вала для образования системы уплотнения;
экранированный электродвигатель содержит статор, корпус электродвигателя, задний корпус электродвигателя и внутренний ротор;
статор плотно закреплен в корпусе электродвигателя, на статор намотаны обмотки, электрическое напряжение с широтно-импульсной модуляцией прикладывается на входы обмоток для создания магнитного потока для взаимодействия с магнитным полем внутреннего ротора, при этом внутренний ротор создает крутящий момент и приводит рабочее колесо, защитная оболочка предотвращает коррозию обмоток статора от агрессивной текучей среды;
корпус электродвигателя имеет фланец насоса, используемый для плотного соединения с фланцем оболочки и корпусом насоса для предотвращения утечки агрессивной текучей среды, задний фланец корпуса электродвигателя используется для соединения заднего корпуса электродвигателя с металлической задней опорой составного вала;
задний корпус электродвигателя прикреплен на заднем фланце корпуса электродвигателя, причем задний корпус электродвигателя характеризуется тем, что:
металлическая задняя опора составного вала заднего корпуса, проходящая вовнутрь и в аксиальном направлении, плотно объединена с задним гнездом вала защитной оболочки и обеспечивает опору и прочность удерживания, требуемые составным неподвижным валом, поверхность металлической задней опоры составного вала плотно прикреплена и прижата к скользящей упорной поверхности керамической втулки вала, уплотняющая поверхность заднего гнезда вала прижата и уплотнена как металлической задней опорой составного вала, так и керамической втулка вала, прижатой и уплотненной задним упорным кольцом с уплотнительным кольцом для предотвращения утечки из защитной оболочки; и
внутренний ротор, установленный во внутреннем пространстве защитной оболочки, представляет собой кольцеобразную конструкцию, содержащую основные магниты, ярмо ротора и проходящую в аксиальном направлении часть, основные магниты установлены на наружной поверхности ярма ротора, внутренний ротор покрыт техническим пластиком, стойким к коррозии, керамический подшипник установлен в центральном отверстии внутреннего ротора для сопряжения с неподвижным валом, проходящая в аксиальном направлении часть объединена со ступицей рабочего колеса; причем внутренний ротор характеризуется тем, что:
внутреннее пространство ярма ротора содержит глухую заднюю опору вала защитной оболочки и металлическую заднюю опору составного вала заднего корпуса электродвигателя, проходящие вовнутрь и в аксиальном направлении во внутреннем пространстве.
5. Электронасос с двигателем на постоянных магнитах по п.4, отличающийся тем, что длина ярма ротора увеличена, чтобы соответствовать длине подшипника.
6. Электронасос с двигателем на постоянных магнитах по п.4, отличающийся тем, что заднее гнездо вала поддерживается металлической задней опорой вала заднего корпуса электродвигателя, заднее гнездо вала имеет проходящую в аксиальном направлении часть, проходящую в аксиальном направлении от нижней стороны защитной оболочки в отверстие для удерживания вала, и длина удерживания содержит общую длину, посредством которой вспомогательное ярмо установлено на металлической задней опоре вала.
7. Электронасос с двигателем на постоянных магнитах, представляющий собой конструкцию с двусторонне опертым неподвижным валом с устройством контроля и содержащий: корпус насоса, треугольную переднюю опору, рабочее колесо, защитную оболочку, устройство контроля, неподвижный вал и электродвигатель, отличающийся тем, что:
корпус насоса содержит входное отверстие, выходное отверстие и проточный канал и используется для размещения в нем рабочего колеса, переднее упорное кольцо, установленное на внутренней стороне входного отверстия корпуса насоса, используется для сопряжения с упорным подшипником рабочего колеса для образования вместе аксиального упорного подшипника;
треугольная передняя опора, соединенная с входным отверстием корпуса насоса, проходит через отверстие ступицы в аксиальном направлении для поддержки конца неподвижного вала;
в корпусе насоса собрано рабочее колесо, треугольная передняя опора проходит через отверстие ступицы в аксиальном направлении и используется для поддерживания конца неподвижного вала, ступица используется для объединения с проходящей в аксиальном направлении частью внутреннего ротора электродвигателя, при этом рабочее колесо и внутренний ротор составляют единое целое или встроены для объединения в единое целое;
защитная оболочка представляет собой чашевидную конструкцию, содержащую глухую заднюю опору вала, расположенную на нижней стороне защитной оболочки, в глухой задней опоре вала с кольцевым пазом нет сквозного отверстия, заднее упорное кольцо установлено на передней поверхности отверстия для удерживания вала и используется для сопряжения с подшипником внутреннего ротора для образования аксиального упорного подшипника; фланец оболочки расположен на передней стороне защитной оболочки и объединен с корпусом насоса и фланцем насоса электродвигателя; колонная часть оболочки расположена на боковой стороне защитной оболочки и проходит через внутреннюю сторону статора с неплотной скользящей посадкой, задний корпус электродвигателя плотно объединен с нижней стороной защитной оболочки;
причем защитная оболочка характеризуется тем, что:
глухая задняя опора вала установлена в центре нижней стороны защитной оболочки и проходит вовнутрь и в аксиальном направлении во внутреннее пространство ярма ротора; глухая задняя опора вала содержит отверстие для удерживания вала, проходящее вовнутрь, и кольцевой паз, выполненный на наружной стороне глухой задней опоры вала, наружная боковая поверхность отверстия для удерживания вала полностью объединена с металлической задней опорой вала и поддерживается ею для образования металлической удерживающей опоры; кольцевой паз содержит отверстие, при этом комплект контроля устройства контроля расположен с наружной нижней стороны защитной оболочки; вспомогательное ярмо плотно соединено с контролирующей металлической задней опорой вала, проходящей в аксиальном направлении от заднего корпуса электродвигателя,
устройство контроля содержит несколько вспомогательных магнитов и комплект контроля, причем устройство контроля характеризуется тем, что:
число вспомогательных магнитов равно числу основных магнитов, вспомогательные магниты собраны на одном конце внутренней стороны ярма внутреннего ротора вблизи нижней стороны защитной оболочки, и направление полюса вспомогательного магнита отличается от направления полюса основного магнита, вспомогательные магниты и внутренний ротор герметизированы вместе; аксиальная длина вспомогательных магнитов по меньшей мере в два раза превышает длину аксиального перемещения (включая аксиальный износ подшипника) внутреннего ротора, силовая линия магнитного потока образует вспомогательный магнитный контур, который сосуществует с основным магнитным контуром в ярме ротора;
комплект контроля содержит вспомогательное ярмо и несколько элементов контроля, элементы контроля установлены на поверхности кольцеобразного вспомогательного ярма с ферромагнитным материалом и герметизированы в компонент изоляционным материалом; внутренняя сторона вспомогательного ярма плотно объединена и соединена с поверхностью наружного диаметра контролирующей металлической задней опоры вала; на заднем конце вспомогательного ярма расположена точка совмещения магнитов, ее электрическое угловое положение связано с другой точкой совмещения на оси контролирующей металлической задней опоры вала заднего корпуса электродвигателя, и, когда статор экранированного электродвигателя собран в корпусе электродвигателя, связано с контрольной точкой электрического углового положения обмоток статора;
неподвижный вал, представляющий собой двусторонне опертую конструкцию, изготовлен из керамического материала, передняя сторона неподвижного вала опирается на треугольную переднюю опору, а задняя сторона неподвижного вала поддерживается глухой задней опорой вала, проходящей наружу, неподвижный вал сопрягается с подшипником для поддержки вращения внутреннего ротора, и длина центральной части неподвижного вала соответствует требуемой длине подшипника для выдерживания равнодействующей силы, переносимой внутренним ротором;
экранированный электродвигатель содержит статор, корпус электродвигателя, задний корпус электродвигателя и внутренний ротор;
статор плотно закреплен в корпусе электродвигателя, на статор намотаны обмотки, электрическое напряжение с широтно-импульсной модуляцией прикладывается к обмоткам и создает магнитный поток для взаимодействия с магнитным полем внутреннего ротора для создания крутящего момента и привода рабочего колеса, защитная оболочка предотвращает коррозию обмоток статора от агрессивной текучей среды;
корпус электродвигателя имеет фланец насоса, используемый для плотного соединения с фланцем оболочки и корпусом насоса для предотвращения утечки агрессивной текучей среды, задний фланец корпуса электродвигателя используется для соединения заднего корпуса электродвигателя с контролирующей металлической задней опорой вала;
задний корпус электродвигателя прикреплен на заднем фланце корпуса электродвигателя, причем задний корпус электродвигателя характеризуется тем, что:
контролирующая металлическая задняя опора вала расположена в центре заднего корпуса электродвигателя; и
внутренний ротор, установленный во внутреннем пространстве защитной оболочки, представляет собой кольцеобразную конструкцию, содержащую основные магниты, ярмо ротора и проходящую в аксиальном направлении часть, основные магниты установлены на наружной поверхности ярма ротора, внутренний ротор покрыт техническим пластиком, стойким к коррозии, керамический подшипник установлен в центральном отверстии внутреннего ротора для сопряжения с неподвижным валом, проходящая в аксиальном направлении часть объединена со ступицей рабочего колеса; причем внутренний ротор характеризуется тем, что: внутреннее пространство ярма ротора содержит глухую заднюю опору вала защитной оболочки и контролирующую металлическую заднюю опору вала заднего корпуса электродвигателя, проходящие вовнутрь и в аксиальном направлении во внутреннем пространстве.
8. Электронасос с двигателем на постоянных магнитах по п.7, отличающийся тем, что длина ярма ротора увеличена, чтобы соответствовать длине подшипника.
9. Электронасос с двигателем на постоянных магнитах по п.7, отличающийся тем, что заднее гнездо вала поддерживается металлической задней опорой вала заднего корпуса электродвигателя, заднее гнездо вала имеет проходящую в аксиальном направлении часть, проходящую в аксиальном направлении от нижней стороны защитной оболочки в отверстие для удерживания вала, и длина удерживания содержит общую длину, с которой вспомогательное ярмо установлено на металлической задней опоре вала.
10. Электронасос с двигателем на постоянных магнитах, представляющий собой конструкцию с односторонне опертым консольным неподвижным валом с устройством контроля и содержащий: корпус насоса, рабочее колесо, защитную оболочку, устройство контроля, составной неподвижный вал и электродвигатель, отличающийся тем, что
корпус насоса, содержащий входное отверстие, выходное отверстие и проточный канал, используется для размещения в нем рабочего колеса, входное отверстие корпуса насоса и еще одно входное отверстие рабочего колеса образуют гладкий канал с увеличивающимся внутренним диаметром без какого-либо возмущения, корпус насоса представляет собой металлическую конструкцию, полученную литьем, облицовка корпуса изготовлена из стойкого к коррозии пластика и нанесена на внутренней стороне корпуса насоса, переднее упорное кольцо установлено во входном отверстии на внутренней стороне корпуса насоса и используется для сопряжения с упорным подшипником рабочего колеса для образования аксиального упорного подшипника;
в корпусе насоса установлено рабочее колесо, и ступица используется для объединения с проходящей в аксиальном направлении частью внутреннего ротора, так что рабочее колесо и внутренний ротор составляют единое целое или встроены для объединения в единое целое, отверстие в ступице представляет собой отверстие в центре кривой ступицы для обеспечения повторной циркуляции циркулирующей текучей среды;
защитная оболочка представляет собой чашевидную конструкцию, на нижней стороне имеет заднее гнездо вала с отверстием и углублением на наружной стороне, фланец оболочки находится на передней стороне и объединен с корпусом насоса и фланцем насоса корпуса электродвигателя, что предотвращает утечку текучей среды; колонная часть оболочки находится на боковой стороне и проходит через внутреннюю сторону статора с неплотной скользящей посадкой, и нижняя сторона плотно объединена с задним корпусом электродвигателя; причем защитная оболочка характеризуется тем, что:
заднее гнездо вала находится в центре на нижней стороне защитной оболочки, проходит вовнутрь в сторону внутреннего пространства ярма ротора; и содержит отверстие, вогнутое отверстие и уплотняющую поверхность; отверстие выполнено в центре заднего гнезда вала и используется для размещения в нем составного неподвижного вала; уплотняющая поверхность заднего гнезда вала плотно прикреплена поверхностью керамической втулки вала, включая уплотнительное кольцо и контролирующую металлическую заднюю опору вала заднего корпуса электродвигателя для предотвращения утечки агрессивной текучей среды; при этом комплект контроля устройства контроля расположен на вогнутом отверстии наружной нижней стороны защитной оболочки, заднее гнездо вала объединено с контролирующей составной металлической задней опорой вала для образования металлической составной опоры;
устройство контроля содержит несколько вспомогательных магнитов и комплект контроля, внутренняя сторона вспомогательного ярма установлена на наружной кольцеобразной поверхности контролирующей металлической задней опоры составного вала, причем устройство контроля характеризуется тем, что:
число вспомогательных магнитов равно числу основных магнитов, вспомогательные магниты собраны на одном конце внутренней стороны ярма внутреннего ротора вблизи нижней стороны защитной оболочки, и направление полюса вспомогательных магнитов отличается от направления полюса основных магнитов, вспомогательные магниты и внутренний ротор герметизированы вместе для предотвращения их коррозии от агрессивной текучей среды; аксиальная длина вспомогательных магнитов по меньшей мере в два раза превышает длину аксиального перемещения (включая аксиальный износ подшипника) внутреннего ротора, силовая линия магнитного потока образует вспомогательный магнитный контур, который сосуществует с основным магнитным контуром в ярме ротора;
комплект контроля содержит вспомогательное ярмо и несколько элементов контроля, элементы контроля установлены на поверхности кольцеобразного вспомогательного ярма с ферромагнитным материалом и герметизированы в компонент изоляционным материалом для сборки на кольцеобразной поверхности вогнутого отверстия заднего гнезда вала защитной оболочки; внутренняя сторона вспомогательного ярма соединена с поверхностью наружного диаметра контролирующей металлической задней опоры вала, проходящей в аксиальном направлении из заднего корпуса электродвигателя; на заднем конце вспомогательного ярма расположена точка совмещения магнитов, связанная с точкой совмещения на оси контролирующей составной металлической задней опоры вала и точкой совмещения магнитов статора обмотки статора; причем два аксиальных конца вспомогательных магнитов не выходят за аксиальные пределы вспомогательного ярма;
составной неподвижный вал представляет собой консольно опертую конструкцию и выполнен из керамической втулки вала, металлического вала и заднего корпуса электродвигателя, конец составного неподвижного вала установлен на контролирующую металлическую заднюю опору составного вала заднего корпуса электродвигателя, сопрягается с подшипником для поддержки вращения внутреннего ротора, и длина центральной части составного неподвижного вала соответствует длине подшипника для выдерживания равнодействующей силы, переносимой внутренним ротором; составной неподвижный вал характеризуется тем, что:
металлический вал проходит через центральное отверстие керамической втулки вала и содержит круглую головку, расположенную на конце металлического вала, покрытую смоляной оболочкой и плотно прижатую к передней поверхности конца втулки вала, зубчатая часть металлического вала проходит через заднее гнездо вала защитной оболочки и центральное отверстие контролирующей металлической задней опоры составного вала заднего корпуса, проходящего вовнутрь в радиальном направлении, гайка зубчатой части прикреплена на заднем корпусе, и при этом два конца керамических втулок вала плотно прижаты к круглой головке и контролирующей металлической задней опоре составного вала для образования высокожесткого составного неподвижного вала; скользящая упорная поверхность керамической втулки вала плотно прижата к поверхности контролирующей металлической задней опоры составного вала, и два уплотнительных кольца установлены на обоих концах керамической втулки вала для образования системы уплотнения;
экранированный электродвигатель содержит статор, корпус электродвигателя, задний корпус электродвигателя и внутренний ротор;
статор плотно закреплен в корпусе электродвигателя, на статор намотаны обмотки, электрическое напряжение с широтно-импульсной модуляцией прикладывается на входы обмоток для создания магнитного потока для взаимодействия с магнитным полем внутреннего ротора, при этом внутренний ротор создает крутящий момент и приводит рабочее колесо, защитная оболочка предотвращает коррозию обмоток статора от агрессивной текучей среды;
корпус электродвигателя имеет фланец насоса, используемый для плотного соединения с фланцем оболочки и корпусом насоса для предотвращения утечки агрессивной текучей среды, задний фланец корпуса электродвигателя используется для соединения заднего корпуса электродвигателя с контролирующей металлической задней опорой составного вала;
задний корпус электродвигателя прикреплен на заднем фланце корпуса электродвигателя, причем задний корпус электродвигателя характеризуется тем, что:
контролирующая металлическая задняя опора составного вала заднего корпуса, проходящая вовнутрь и в аксиальном направлении, плотно объединена с задним гнездом вала защитной оболочки и обеспечивает опору и прочность удерживания, требуемые составным неподвижным валом, поверхность контролирующей металлической задней опоры составного вала плотно прикреплена и прижата к скользящей упорной поверхности керамической втулки вала, уплотняющая поверхность заднего гнезда вала прижата и уплотнена как контролирующей металлической задней опорой составного вала, так и керамической втулкой вала, прижатой и уплотненной задним упорным кольцом с уплотнительным кольцом для предотвращения утечки из защитной оболочки; и
внутренний ротор, установленный во внутреннем пространстве защитной оболочки, представляет собой кольцеобразную конструкцию, содержащую основные магниты, ярмо ротора и проходящую в аксиальном направлении часть, основные магниты установлены на наружной поверхности ярма ротора, внутренний ротор покрыт техническим пластиком, стойким к коррозии, керамический подшипник установлен в центральном отверстии внутреннего ротора для сопряжения с неподвижным валом, проходящая в аксиальном направлении часть объединена со ступицей рабочего колеса; причем внутренний ротор характеризуется тем, что:
внутреннее пространство ярма ротора содержит заднее гнездо вала защитной оболочки и контролирующую металлическую заднюю опору составного вала заднего корпуса электродвигателя, проходящие вовнутрь и в аксиальном направлении во внутреннем пространстве.
11. Электронасос с двигателем на постоянных магнитах по п.10, отличающийся тем, что длина ярма ротора увеличена, чтобы соответствовать длине подшипника.
12. Электронасос с двигателем на постоянных магнитах по п.10, отличающийся тем, что заднее гнездо вала поддерживается металлической задней опорой вала заднего корпуса электродвигателя, заднее гнездо вала имеет проходящую в аксиальном направлении часть, проходящую в аксиальном направлении от нижней стороны защитной оболочки в отверстие для удерживания вала, и длина удерживания содержит общую длину, посредством которой вспомогательное ярмо установлено на металлической задней опоре вала.
13. Электронасос с двигателем на постоянных магнитах для повышения конструктивной жесткости неподвижного вала и при необходимости содержащий устройство контроля, отличающийся тем, что устройство контроля содержит несколько вспомогательных магнитов и комплект контроля, причем устройство контроля характеризуется тем, что:
число вспомогательных магнитов равно числу основных магнитов, вспомогательные магниты собраны на одном конце внутренней стороны ярма внутреннего ротора вблизи нижней стороны защитной оболочки, и направление полюса вспомогательных магнитов отличается от направления полюса основных магнитов, вспомогательные магниты и внутренний ротор герметизированы вместе для предотвращения их коррозии от агрессивной текучей среды; аксиальная длина вспомогательных магнитов по меньшей мере в два раза превышает длину аксиального перемещения (включая аксиальный износ подшипника) внутреннего ротора, силовая линия магнитного потока образует вспомогательный магнитный контур, который сосуществует с основным магнитным контуром в ярме ротора; и
комплект контроля содержит вспомогательное ярмо и несколько элементов контроля, элементы контроля установлены на поверхности кольцеобразного вспомогательного ярма с ферромагнитным материалом и герметизированы в компонент изоляционным материалом; внутренняя сторона вспомогательного ярма соединена с поверхностью наружного диаметра контролирующей металлической задней опоры вала или контролирующей металлической задней опоры составного вала; на заднем конце вспомогательного ярма расположена точка совмещения магнитов, связанная с точкой совмещения на оси контролирующей металлической задней опоры вала или контролирующей металлической задней опоры составного вала и точкой совмещения магнитов статора обмотки статора; причем два аксиальных конца вспомогательных магнитов не выходят за аксиальные пределы вспомогательного ярма.
14. Электронасос с двигателем на постоянных магнитах по п.13, отличающийся тем, что количество элементов контроля является четным и равно по меньшей мере четырем, аксиальная длина элементов контроля не менее суммы длины вспомогательных магнитов и аксиального свободного перемещения (включая предельную величину износа упорного подшипника) внутреннего ротора, и ширина окружности элементов контроля не более электрического внутреннего угла 180 градусов.
15. Электронасос с двигателем на постоянных магнитах по п.14, отличающийся тем, что элементы контроля представляют собой пары сигнальных катушек, комплект контроля содержит вспомогательное ярмо и несколько пар сигнальных катушек, и аксиальное перемещение, радиальное перемещение и угол определяются путем расчета сигнала электродвижущего напряжения.
16. Электронасос с двигателем на постоянных магнитах по п.13, отличающийся тем, что элементы контроля представляют собой пары сигнальных катушек, комплект контроля содержит вспомогательное ярмо и несколько пар сигнальных катушек, эти несколько пар сигнальных катушек установлены и расположены на поверхности кольцеобразного вспомогательного ярма, и в направлении по окружности пары сигнальных катушек разделены на две группы катушек - сигнальные катушки α и β, и разность фаз электрического внутреннего угла двух групп равна 90 (270 градусов); позиционирование электрического внутреннего угла и пространственного внутреннего угла пар сигнальных катушек получено с помощью точки совмещения магнитов вспомогательного ярма, что является преимущественным для ремонта и замены комплекта контроля.
17. Электронасос с двигателем на постоянных магнитах по п.16, отличающийся тем, что элементы контроля представляют собой пары сигнальных катушек, комплект контроля содержит вспомогательное ярмо и несколько пар сигнальных катушек, и аксиальное перемещение, радиальное перемещение и угол определяются путем расчета сигнала электродвижущего напряжения.
18. Электронасос с двигателем на постоянных магнитах по п.16, отличающийся тем, что каждая из пар сигнальных катушек расположена так, чтобы закрывать, по меньшей мере, более половины аксиальной длины вспомогательного ярма; варианты расположения пар сигнальных катушек в аксиальном направлении включают один вариант, в котором каждый передний и задний конец пар сигнальных катушек прилегает друг к другу, соответственно, второй вариант, в котором каждый передний и задний конец пар сигнальных катушек расположены вразбежку друг к другу, и еще один вариант, в котором каждые пары сигнальных катушек расположены в пространственном внутреннем угле 180 градусов, и их сочетания.
19. Электронасос с двигателем на постоянных магнитах по п.18, отличающийся тем, что элементы контроля представляют собой пары сигнальных катушек, комплект контроля содержит вспомогательное ярмо и несколько пар сигнальных катушек, и аксиальное перемещение, радиальное перемещение и угол определяются путем расчета сигнала электродвижущего напряжения.
20. Электронасос с двигателем на постоянных магнитах по п.16, отличающийся тем, что аксиальная длина вспомогательного ярма более суммарной аксиальной длины расположенных пар сигнальных катушек, передний конец и задний конец вспомогательного ярма полностью закрывают пары сигнальных катушек, и диапазон аксиального перемещения вспомогательных магнитов внутреннего ротора не выходит за пределы аксиальной длины вспомогательного ярма.
21. Электронасос с двигателем на постоянных магнитах по п.13, отличающийся тем, что элементы контроля содержат несколько пар сигнальных катушек и несколько датчиков Холла, эти несколько пар сигнальных катушек установлены на поверхности кольцеобразного вспомогательного ярма, и в направлении по окружности пары сигнальных катушек разделены на две группы катушек - сигнальные катушки α и β, и разность фаз электрического внутреннего угла двух групп равна 90 (270 градусов); позиционирование электрического внутреннего угла и пространственного внутреннего угла пар сигнальных катушек получено с помощью точки совмещения магнитов вспомогательного ярма, что является преимущественным для ремонта и замены комплекта контроля; разности фаз электрических внутренних углов трех датчиков Холла равны 120 градусов соответственно, причем датчик Холла, находящийся в центральном положении, установлен в центре электрического внутреннего угла в одной из пар сигнальных катушек.
22. Электронасос с двигателем на постоянных магнитах для повышения конструктивной жесткости неподвижного вала и при необходимости содержащий устройство контроля во внутреннем пространстве ярма внутреннего ротора, причем экранированный электродвигатель содержит статор, корпус электродвигателя, задний корпус электродвигателя, устройство контроля, внутренний ротор, защитную оболочку и неподвижный вал;
статор плотно закреплен в корпусе электродвигателя, на статор намотаны обмотки, электрическое напряжение с широтно-импульсной модуляцией прикладывается на входы обмоток для создания магнитного потока для взаимодействия с магнитным полем внутреннего ротора, при этом внутренний ротор создает крутящий момент и приводит рабочее колесо,
корпус электродвигателя имеет задний фланец корпуса электродвигателя, используемый для соединения заднего корпуса электродвигателя с контролирующей металлической задней опорой вала;
задний корпус электродвигателя прикреплен на заднем фланце корпуса электродвигателя, комплект контроля устройства контроля установлен на наружной кольцеобразной поверхности контролирующей металлической задней опоры составного вала заднего корпуса электродвигателя, проходящей вовнутрь во внутреннем пространстве ярма ротора; и устройство контроля содержит несколько вспомогательных магнитов и комплект контроля, внутренняя сторона вспомогательного ярма установлена на наружной кольцеобразной поверхности металлической задней опоры вала, элементы контроля комплекта контроля установлены на наружной поверхности вспомогательного ярма;
внутренний ротор представляет собой кольцеобразную конструкцию, содержащую несколько основных магнитов, ярмо ротора, несколько вспомогательных магнитов, подшипник и проходящую в аксиальном направлении часть, основные магниты установлены на наружной кольцеобразной поверхности ярма ротора, число вспомогательных магнитов равно числу основных магнитов, вспомогательные магниты установлены на одном конце внутренней стороны ярма ротора и обращены в сторону от основных магнитов, направление полюса вспомогательных магнитов отличается от направления полюса основных магнитов, внутренний ротор покрыт техническим пластиком, стойким к коррозии, керамический подшипник установлен в центральном отверстии внутреннего ротора, проходящая в аксиальном направлении часть объединена со ступицей рабочего колеса; и
защитная оболочка представляет собой чашевидную конструкцию, содержащую глухую заднюю опору вала, расположенную на нижней стороне защитной оболочки, на глухой задней опоре вала с кольцевым пазом нет сквозного отверстия, заднее упорное кольцо установлено на передней поверхности отверстия для удерживания вала и используется для сопряжения с подшипником внутреннего ротора для образования аксиального упорного подшипника; колонная часть оболочки находится на боковой стороне и проходит через внутреннюю сторону статора с неплотной скользящей посадкой, задний корпус электродвигателя плотно объединен с нижней стороной защитной оболочки; причем защитная оболочка характеризуется тем, что:
неподвижный вал изготовлен из керамического материала, одна сторона неподвижного вала поддерживается глухой задней опорой вала, проходящей наружу, неподвижный вал сопрягается с подшипником для поддержки вращения внутреннего ротора, и длина центральной части неподвижного вала соответствует требуемой длине подшипника.
23. Электронасос с двигателем на постоянных магнитах по п.22, отличающийся тем, что металлическая задняя опора вала имеет проходящую в аксиальном направлении часть, проходящую в аксиальном направлении от конца ярма ротора вблизи заднего корпуса электродвигателя.
| СПОСОБ ПЕРЕДАЧИ КРУТЯЩЕГО МОМЕНТА ВЕДУЩЕМУ КОЛЕСУ ШАССИ | 2011 |
|
RU2469901C1 |
| US 5926001 A, 20.07.1999 | |||
| US 4211973 A, 08.07.1980 | |||
| US 2005012630 A1, 20.01.2005 | |||
| УСТРОЙСТВО для КОНТРОЛЯ ТЕХНИЧЕСКОГО состояния | 0 |
|
SU314158A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УМЕНЬШЕНИЯ ОСЕВОГО УСИЛИЯ В РОТАЦИОННЫХ МАШИНАХ | 2000 |
|
RU2238442C2 |

