Изобретение относится к области навигации технических средств и может быть использовано в рельефометрических системах для определения местоположения летательных аппаратов (ЛА), принцип функционирования которых основан на корреляционно-экстремальном методе навигации в условиях траекторного маневрирования [Основы навигации по геофизическим полям / И. Н. Белоглазов, Г. И. Джанджгава, Г. П. Чигин; Под ред. А. А. Красовского].
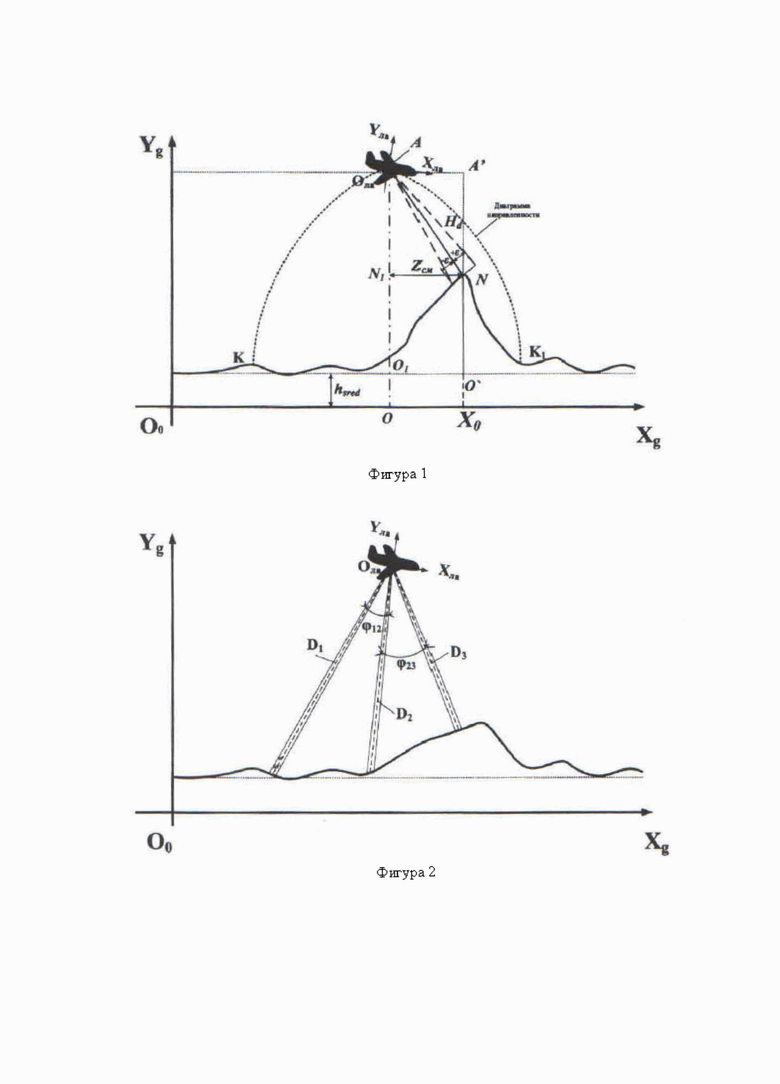
Известен способ корреляционно-экстремальной навигации [Корреляционно-экстремальные методы навигации / В. К. Баклицкий, А. Н. Юрьев], который можно применить для навигации по рельефу, в том числе и по линейным ориентирам, в условиях траекторного маневрирования с использованием в составе рельефометрической системы радиовысотомера (РВ) с ненаправленной антенной. Данный способ в части навигации по линейным ориентирам поясняет рисунок, приведенный на фигуре 1. Реализация данного способа в осуществлении навигации по линейным ориентирам заключается в измерении наклонных расстояний в окрестности линейных ориентиров, возвышающихся над средним уровнем подстилающей поверхности, вычислении высотной функции, определении экстремального значения высотной функции, которое соответствует значению наклонного расстояния до области на подстилающей поверхности, обладающей наибольшим вторичным излучением.
На фигуре 1 такой областью является вершина ориентира с центром в точке N и окрестностью вокруг неё с границами, которые удалены от центра N на расстояние ε, значение которого зависит от алгоритма и параметров зондирующих сигналов, используемых в РВ, входящем в состав рельефометрической системы (РС).
Недостатками данного способа являются:
- невысокая точность местоопределения при осуществлении навигации по линейным поверхностным ориентирам;
- низкая помехоустойчивость.
Причина первого недостатка – низкая пространственная разрешающая способность РВ, входящего в состав РС. При увеличении информативности поля рельефа и высоты полета, возрастает погрешность и вероятность измерения наклонного расстояния до пространственных кластеров [Справочник по радиолокации / Под ред. М.И. Сколника. Пер. с англ. Под общей ред. В.С. Вербы], состоящих из элементарных участков на подстилающей поверхности, обладающих наибольшей отражающей способностью. Значения наклонной дальности в этом случае будут значительно отличаться от значений геометрической высоты ЛА, что в итоге приводит к уменьшению точности местоопределения при осуществлении привязки к линейным возвышающимся ориентирам.
Причиной второго недостатка является низкая помехоустойчивость РС за счет применения ненаправленной антенны, ширина диаграммы направленности которой может достигать десятков градусов.
Известен способ навигации по рельефу [Патент RU 2 623 452 С1. Способ навигации движущихся объектов. Хрусталев А.А.], позволяющий повысить точность местоопределения и скрытность работы, выбранный за прототип. В данном способе построения РС применяется РВ с антенно-фидерной системой (АФС), позволяющей сформировать от одного до нескольких узконаправленных лучей, как показано
на фигуре 2.
РВ РС измеряет наклонные расстояния D1, D2 .. Dn до подстилающей поверхности. В вычислительном блоке РС по данным об угловых положениях υкр (угол крена) и θt, (угол тангажа), полученных от бортовой инерциальной навигационной системы (ИНС) и измеренным значениям дальности производится вычисление высот в точках пересечения лучей АФС с поверхностью.
Используя данные датчика абсолютного уровня, а также эталонные значения поля высот рельефа, в вычислительном блоке РС выполняется сопоставление измеренных значений высот рельефа с эталонными в различных гипотезах местоположения ЛА. Производится вычисление критериальных функций и определение истинной (достоверной) гипотезы местоположения ЛА.
Достоинством данного способа является бóльшая точность определения местоположения по сравнению с предыдущим методом.
Недостатками являются:
- ограничение функционирования РС при угловых колебаниях;
- сложность построения АФС, необходимость поиска оптимального решения при выборе габаритных размеров АФС и частоты зондирующего сигнала;
- зависимость точности местоопределения от погрешности данных, получаемых от ИНС.
Причиной первого недостатка является то, что при увеличении угловых колебаний снижается эффективная площадь рассеяния (ЭПР) подстилающей поверхности, следовательно снижается уровень полезного отраженного сигнала, что ведет к возрастанию ошибок измерения наклонных расстояний и, соответственно, ошибок местоопределения.
Причиной второго недостатка является сложность в проектировании и технологии изготовления многолучевых АФС.
Причиной третьего недостатка является зависимость погрешности определения углов крена, тангажа и рыскания ИНС от времени непрерывной работы.
Техническим результатом предлагаемого способа навигации является повышение точности и достоверности навигационного местоопределения летательного аппарата.
Технический результат достигается за счет того, что в представленном способе навигации летательных аппаратов используют эталонную карту местности при измерении наклонных расстояний до подстилающей поверхности, являющейся информационным участком для определения местоположения ЛА в пространстве в условиях траекторного маневрирования при помощи РВ, входящего в состав рельефометрической системы, за счет излучения и приема радиоволн через АФС, отраженных от участков подстилающей поверхности с наибольшей интенсивностью отражения, радиоволны излучают и принимают с помощью АФС, состоящей из двух антенн с широкой и узкой ДН, при помощи антенны с широкой ДН с учетом поступающих на вход РС эталонных данных о линейных ориентирах и данных об угловых положениях, а именно углах тангажа, крена и рысканья летательного аппарата, измеряют наклонное расстояние до линейного ориентира, возвышающегося над средним уровнем поверхности рассматриваемого участка относительно уровня моря, рассчитывают допустимо возможный диапазон значений абсолютной высоты ЛА относительного выбранного нулевого уровня подстилающей поверхности, например уровня моря, определяют размеры окрестности выбранного поверхностно-возвышающегося линейного ориентира, затем производят вычисление координат точек пересечения оси луча антенны с узкой ДН с подстилающей поверхностью, являющихся критерием истинности гипотезы местоположения ЛА, путем поиска экстремума критериальной функции корреляционно-экстремальным способом для всех возможных гипотез положения ЛА относительно вершины выбранного поверхностно-возвышающегося линейного ориентира, и определяют координаты ЛА относительно вершины линейного ориентира.
Способ навигации ЛА по поверхностным линейным ориентирам поясняют следующие рисунки.
Фигура 1. Схема геометрического расположения ЛА относительно возвышающегося линейного ориентира.
Фигура 2. Рельефометрическая система с несколькими лучами, рассматриваемая как прототип.
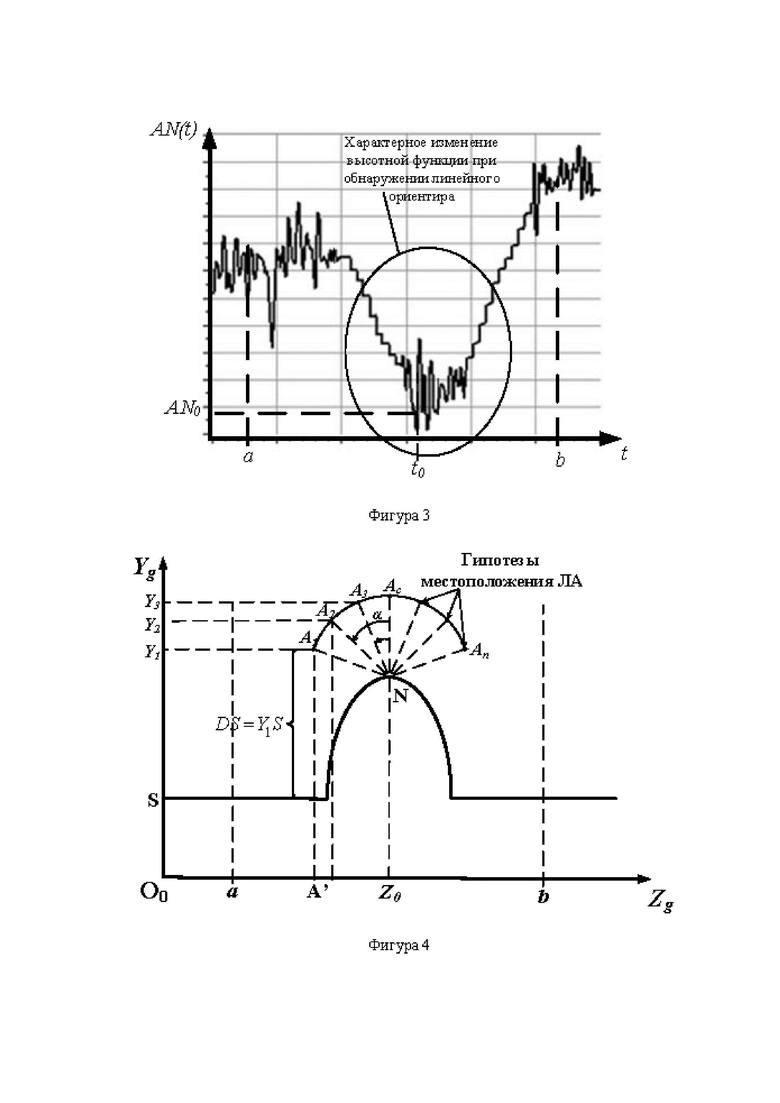
Фигура 3. Пример высотной функции в окрестности линейного ориентира, определенной при помощи РВ с широкой ДН.
Фигура 4. Пример геометрического расположения ЛА в точках гипотез его местоположения.
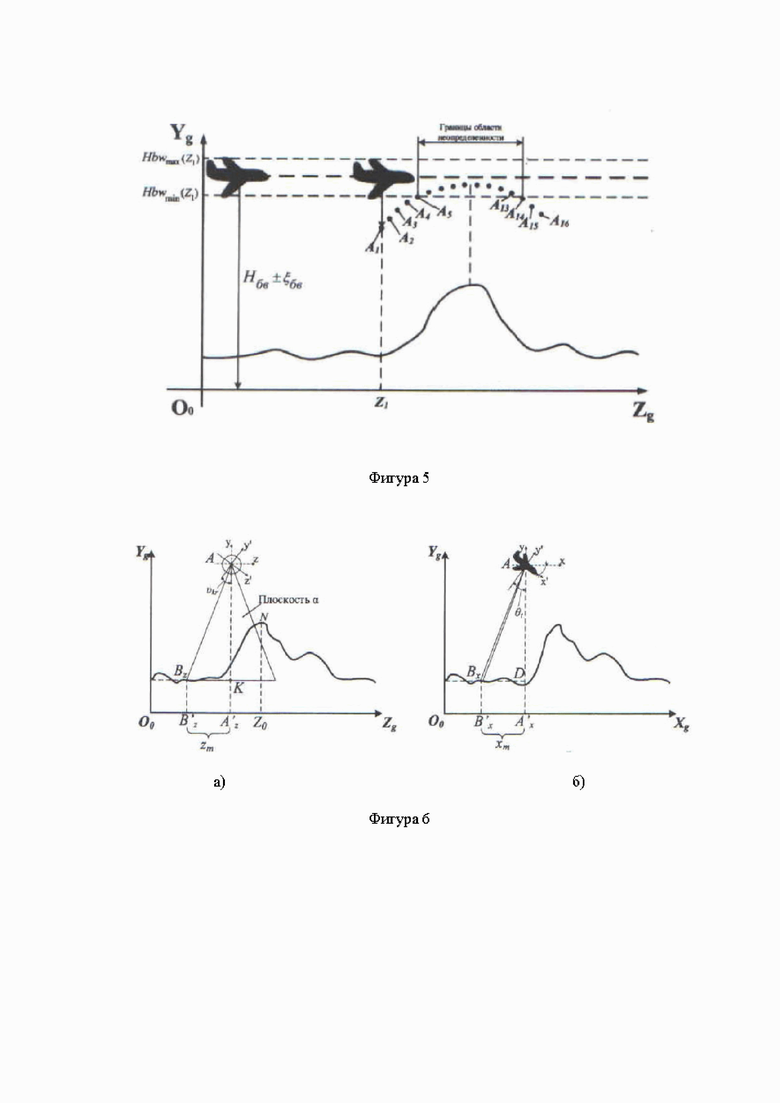
Фигура 5. Схема расположения гипотез местоположения ЛА за пределами границ диапазона значений абсолютных высот нахождения ЛА.
Фигура 6. Схемы геометрического положения ЛА с использованием антенны с узкой ДН относительно возвышающегося линейного ориентира, вид спереди (а) и вид сбоку (б).
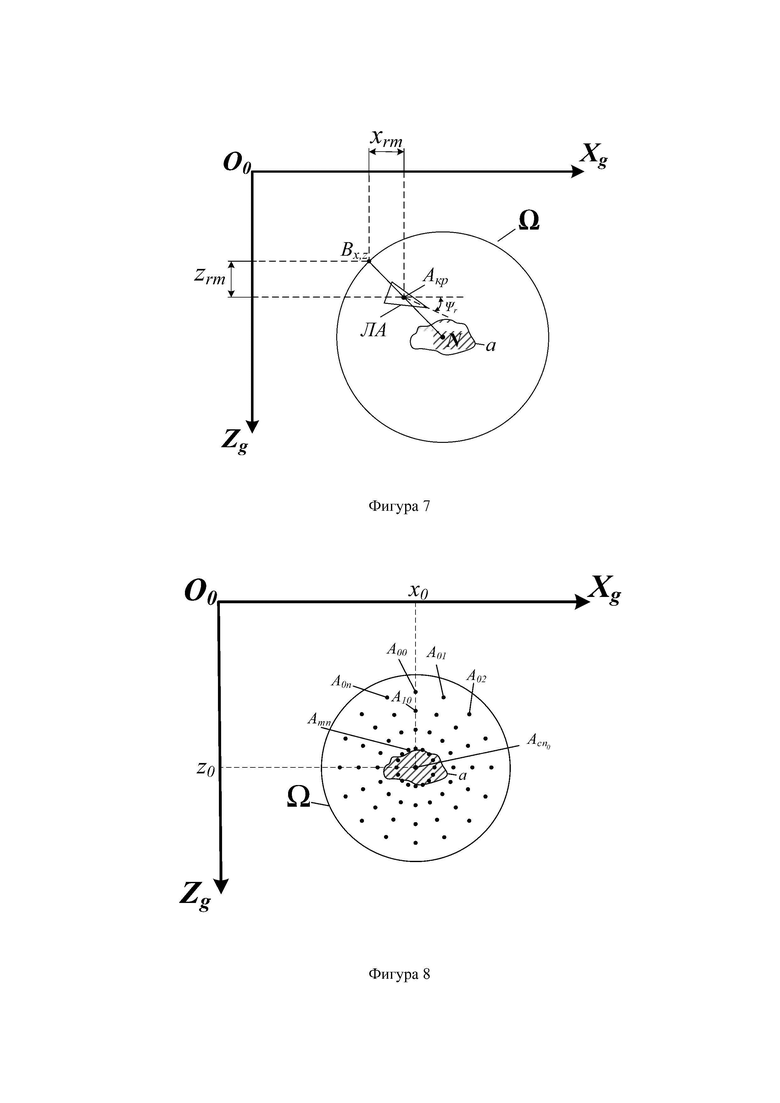
Фигура 7. Геометрическая схема расположения ЛА и измеряемых наклонных расстояний AB и AN в плоскости O0ZgXg.
Фигура 8. Гипотезы местоположения ЛА относительно линейного ориентира в плоскости O0ZgXg.
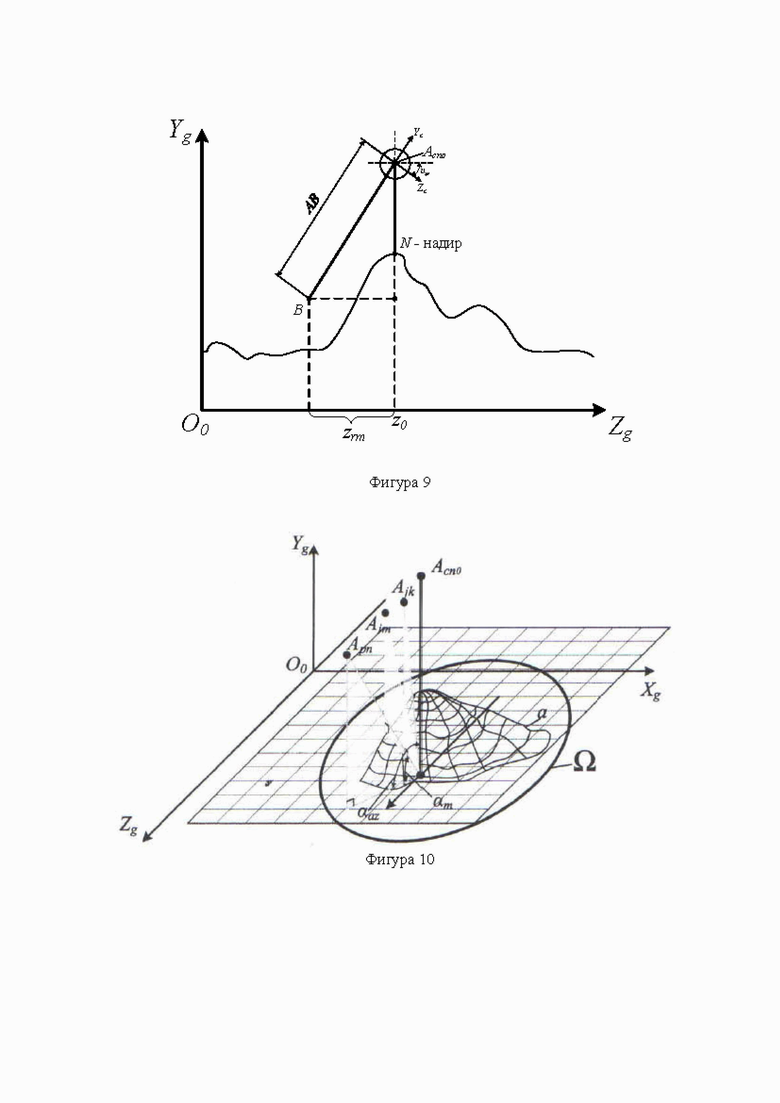
Фигура 9. Геометрическая схема расположения ЛА и наклонного расстояния AB в гипотетической точке  .
.
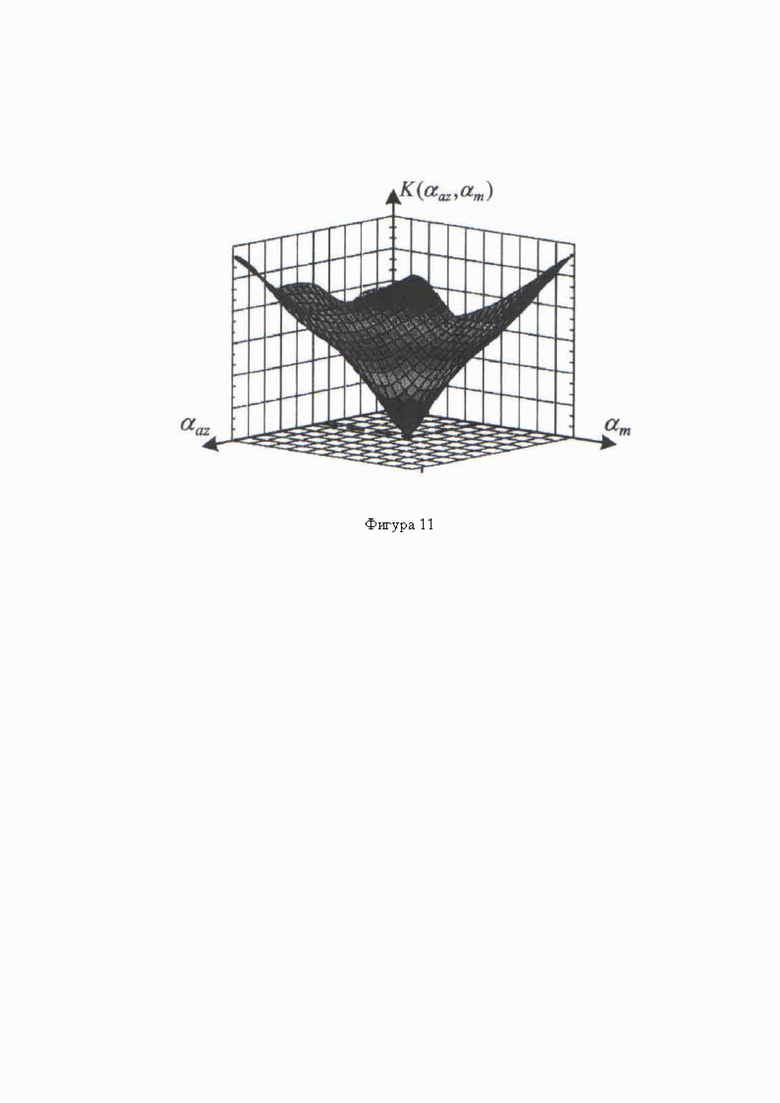
Фигура 10. Геометрическая схема некоторых точек гипотез A в области неопределенности  .
.
Фигура 11. Критериальная функция  .
.
Способ навигации осуществляется следующим образом.
При помощи радиовысотомера и антенны с широкой диаграммой направленности измеряют расстояние AN (фиг. 1) до окрестности вершины ориентира ± ε, являющейся областью ближайших точек к ЛА на подстилающей поверхности. Значение этого расстояния в момент времени t0 обозначено как AN0 на фигуре 3.
Затем рассчитывают допустимо возможный диапазон значений абсолютной высоты летательного аппарата относительно выбранного нулевого уровня подстилающей поверхности, например уровня моря.
Геометрическое место точек расположения ЛА с соответствующими координатами (гипотезами) в окрестности ориентира является дугой окружности радиуса AN в плоскостях YgO0Zg (фиг. 4) и YgO0Xg.
Длина дуги зависит от значений расстояний AN и DS. Расстояние DS является геометрической высотой между подстилающей поверхностью и одной из гипотез местоположения ЛА, отвечающей нижеприведенным неравенствам (1, 2), ограничивающим длину дуги гипотез ЛА.
Как показано на фиг. 5, значения высот Y1, Y2…Yn соответствующих гипотез A1, A2…An определяются выражением (2) и должны находиться в пределах значений абсолютных высот Hbw с максимальной погрешностью ξbw, полученных от бортового измерителя абсолютного уровня ЛА.
 ,
,
где  – соответственно минимальное и максимальное значения границы диапазона абсолютных высот, в пределах которых находится истинное значение абсолютной высоты ЛА.
– соответственно минимальное и максимальное значения границы диапазона абсолютных высот, в пределах которых находится истинное значение абсолютной высоты ЛА.
На фиг. 5 показан пример расположения гипотез [A1(Z1)…A4(Z4); A14(Z14)…A16(Z16)] за пределами границ диапазона значений абсолютных высот нахождения ЛА, полученных от измерителя абсолютных высот, значения которых удовлетворяют неравенству (1), но не удовлетворяют неравенству (2). Поэтому для удовлетворения обоим неравенствам (1) и (2) границы зоны поиска координат ЛА над ориентиром сужены до отрезка [A5(Z5)…A14(Z14)]
При помощи РВ с антенной, имеющей узкую ДН, в плоскостях YgO0Zg и YgO0Xg осуществляются измерения наклонных расстояний. Пример геометрической схемы данного измерения представлен на фиг. 6 (а – наблюдение ЛА с кормы, б – наблюдение ЛА сбоку).
Длина отрезка  обозначена как zm, тогда:
обозначена как zm, тогда:
 ,
,
где  – значения углов крена,
– значения углов крена,  – отрезок, длина которого соответствует измеренному наклонному расстоянию.
– отрезок, длина которого соответствует измеренному наклонному расстоянию.
Значение высоты AK определяется из выражения:
 .
.
Длину отрезка  в плоскости YgO0Xg обозначим как xm, тогда:
в плоскости YgO0Xg обозначим как xm, тогда:
 ,
,
где  – значения угла тангажа.
– значения угла тангажа.
Геометрическая высота (вертикаль), соответствующая высоте AD в точке пересечения луча с поверхностью, определяется из выражения:
 ,
,
Длины отрезков zrm и xrm (фиг. 7), соответствующие отрезкам xm и rm с учетом углов рысканья ±ψr, определяются из выражений:
 ,
, .
.
На фиг. 8 в плоскости O0ZgXg точками, обозначенными буквами A с соответствующими индексами, показаны гипотезы местоположения ЛА в окрестности ориентира, которая обозначена как Ω. Ориентир условно представлен замкнутой кривой a. Размер окрестности ориентира Ω определяется шириной диаграммы направленности ненаправленной антенны, высотой полета и выполнением условий (1) и (2).
Затем производится вычисление координат точек пересечения оси луча антенны с узкой диаграммой направленности с подстилающей поверхностью. На первой итерации алгоритма анализируется гипотеза расположения ЛА строго над вершиной ориентира (гипотеза с координатами местоположения ЛА (x0, z0, y0) показана на фиг. 8). Схема расположения ЛА в гипотезе приведена на фиг. 9.
По формулам (2 – 7) определяются значения длин отрезков  относительно координат (x0, z0) гипотезы (фиг. 8). Значения координат точки B (фиг. 9) определяются из выражений:
относительно координат (x0, z0) гипотезы (фиг. 8). Значения координат точки B (фиг. 9) определяются из выражений:
 ,
, ,
, .
.
Критерием истинности местоположения ЛА в рассматриваемых гипотезах является геометрическое условие пересечения луча, сформированного антенной с узкой ДН, с подстилающей поверхностью в точке  , при этом значение разности
, при этом значение разности  между координатой
между координатой  и должно стремиться по модулю к минимальному значению:
и должно стремиться по модулю к минимальному значению:
 ,
,
где  , индексом n обозначены координаты в соответствующих гипотезах.
, индексом n обозначены координаты в соответствующих гипотезах.
На последующих итерациях осуществляется вычисление величины в остальных гипотезах из области  , имеющих соответствующие углы азимута
, имеющих соответствующие углы азимута  и места
и места  .
.
На фигуре 10 представлена геометрическая схема расположения некоторых точек гипотез A в окрестности ориентира, поясняющая осуществление перебора гипотез ЛА за счет изменения углов и относительно координат центра ориентира. Определив значения для каждой гипотезы при  рассчитываются координаты экстремума критериальной функции, которые являются координатами летательного аппарата относительно вершины линейного ориентира:
рассчитываются координаты экстремума критериальной функции, которые являются координатами летательного аппарата относительно вершины линейного ориентира:
 ,
,
На фигуре 11 приведен пример критериальной функции.
Одновременное получение данных о наклонных расстояниях, измеренных при помощи РВ с АФС, состоящей из двух антенн с широкой и узкой диаграммами направленности и реализация описанного алгоритма позволит, по сравнению с прототипами:
– повысить навигационную точность местоопределения ЛА за счет осуществления привязки к линейным возвышающимся над средним уровнем поверхности ориентирам при помощи измеренных значений наклонного расстояния радиовысотомером с узкой ДН;
– обеспечить лучшую достоверность навигационного местоопределения в условиях углового маневрирования ЛА за счет использования в алгоритмах корреляционно-экстремальной обработки сигналов измеренных данных при помощи РВ с ненаправленной антенной и с антенной, имеющей узкую ДН.
Таким образом, способ навигации летательных аппаратов по линейным поверхностным ориентирам обладает рядом существенных преимуществ над прототипом и аналогом.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОНОМНОЙ НАВИГАЦИИ МАЛОВЫСОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2018 |
|
RU2691124C1 |
| СИСТЕМА КОРРЕКЦИИ ОШИБОК ИНС ЛЕТАТЕЛЬНОГО АППАРАТА ПО ДОРОЖНОЙ КАРТЕ МЕСТНОСТИ | 2018 |
|
RU2684710C1 |
| СИСТЕМА КОМПЛЕКСНОЙ ОБРАБОТКИ ИНФОРМАЦИИ РАДИОНАВИГАЦИОННЫХ И АВТОНОМНЫХ СРЕДСТВ НАВИГАЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ ДЕЙСТВИТЕЛЬНЫХ ЗНАЧЕНИЙ ПАРАМЕТРОВ САМОЛЕТОВОЖДЕНИЯ | 2012 |
|
RU2487419C1 |
| СПОСОБ АВТОНОМНОЙ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2015 |
|
RU2598000C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2018 |
|
RU2681303C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2471152C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2005 |
|
RU2284544C1 |
| Бортовая система беспилотного летательного аппарата (БЛА) с автономной коррекцией координат | 2018 |
|
RU2703806C1 |
| Способ навигации летательных аппаратов и устройство для его осуществления | 2019 |
|
RU2707269C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОШИБКИ ИЗМЕРЕНИЯ СКОРОСТИ ЛА ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМОЙ И БОРТОВОЙ НАВИГАЦИОННЫЙ КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2411538C2 |
Изобретение относится к области навигации технических средств и может быть использовано в рельефометрических системах для определения местоположения летательных аппаратов (ЛА). Сущность заявленного способа заключается в том, что радиоволны излучают и принимают с помощью антенно-фидерной системы, состоящей из двух антенн, при помощи антенны с широкой диаграммой направленности измеряют наклонное расстояние до линейного ориентира, рассчитывают возможный диапазон значений абсолютной высоты, определяют размеры окрестности выбранного ориентира, производят вычисление координат точек пересечения оси луча антенны с узкой диаграммой направленности с подстилающей поверхностью путем поиска экстремума критериальной функции корреляционно-экстремальным способом для возможных гипотез положения ЛА относительно вершины выбранного ориентира и определяют координаты ЛА. Технический результат заключается в повышении точности и достоверности навигационного местоопределения ЛА. 11 ил.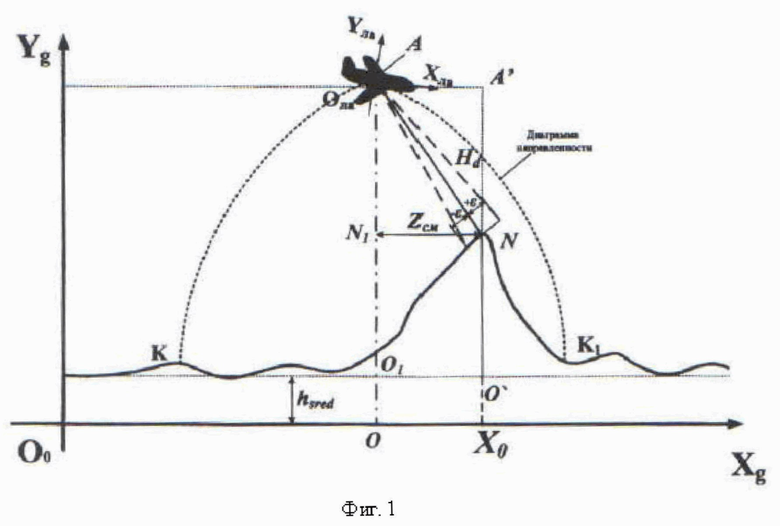
Способ навигации летательных аппаратов по линейным поверхностным ориентирам, заключающийся в использовании эталонной карты местности при измерении наклонных расстояний до подстилающей поверхности, являющейся информационным участком для определения местоположения летательного аппарата в пространстве в условиях траекторного маневрирования при помощи радиовысотомера, входящего в состав рельефометрической системы, за счет излучения и приема радиоволн через антенно-фидерную систему, отраженных от участков подстилающей поверхности с наибольшей интенсивностью отражения, отличающийся тем, что радиоволны излучают и принимают с помощью антенно-фидерной системы, состоящей из двух антенн с широкой и узкой диаграммами направленности, при помощи антенны с широкой диаграммой направленности с учетом поступающих на вход рельефометрической системы эталонных данных о линейных ориентирах и данных об угловых положениях, а именно углах тангажа, крена и рысканья летательного аппарата, измеряют наклонное расстояние до линейного ориентира, возвышающегося над средним уровнем поверхности рассматриваемого участка относительно уровня моря, рассчитывают допустимо возможный диапазон значений абсолютной высоты летательного аппарата относительного выбранного нулевого уровня подстилающей поверхности, например уровня моря, определяют размеры окрестности выбранного поверхностно-возвышающегося линейного ориентира, затем производят вычисление координат точек пересечения оси луча антенны с узкой диаграммой направленности с подстилающей поверхностью, являющихся критерием истинности гипотезы местоположения летательного аппарата, путем поиска экстремума критериальной функции корреляционно-экстремальным способом для всех возможных гипотез положения летательного аппарата относительно вершины выбранного поверхностно-возвышающегося линейного ориентира, и определяют координаты летательного аппарата относительно вершины линейного ориентира.
| Способ навигации движущихся объектов | 2016 |
|
RU2623452C1 |
| US 10712158 B2, 14.07.2020 | |||
| US 20110282580 A1, 17.11.2011 | |||
| US 20230222690 A1, 13.07.2023. | |||

