Изобретение относится к области радиолокационной техники и может быть использовано при построении радиолокационных рельефометрических систем, предназначенных для определения местоположения летательных аппаратов (ЛА) с использованием радиоволн.
Известен корреляционно-экстремальный способ навигации (КЭСН) ЛА на основе радиолокационной рельефометрической системы с использованием радиоволн, излучаемых в виде одного луча [1], выбранный за аналог.
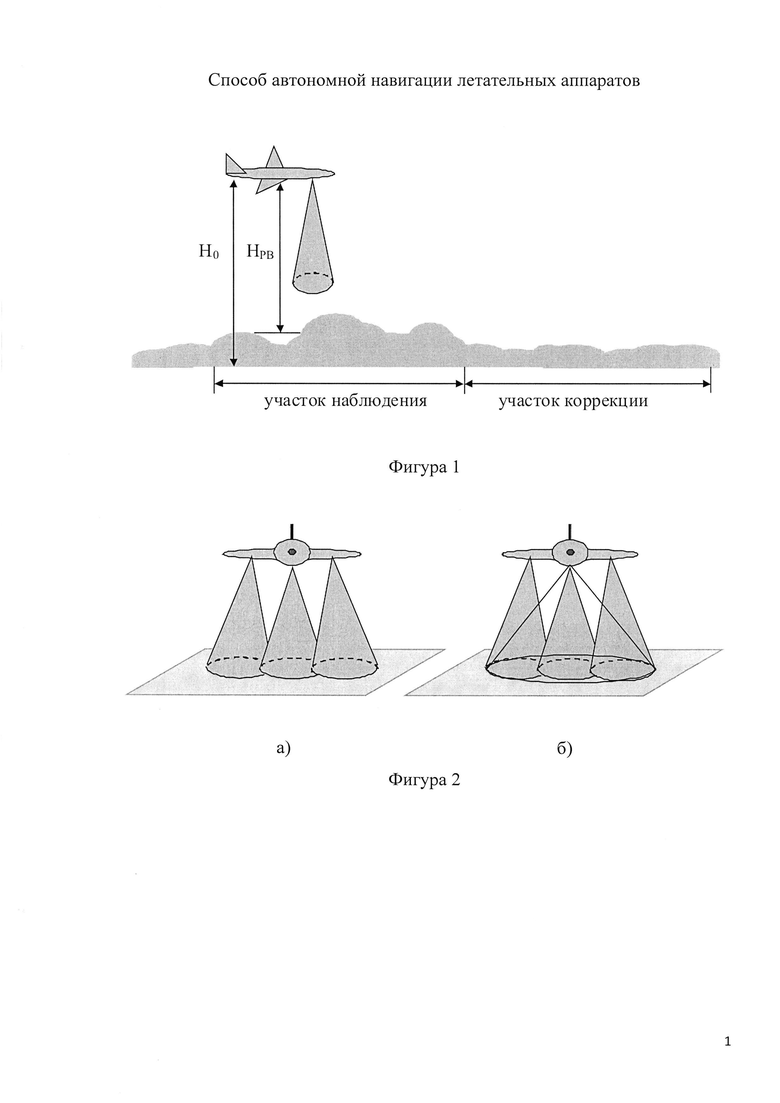
Реализация способа [1] заключается в составлении текущей карты местности (ТКМ) по данным измерений высоты бародатчика Но и импульсного радиовысотомера Нрв при пролете мерного участка и последующего сравнения ТКМ с эталонной картой местности (ЭКМ), находящейся на борту ЛА до начала его движения. Таким образом, ТКМ представляет собой одномерную карту, имеющую вид одной строки матрицы ЭКМ. Вычисляют сигнал коррекции местоположения ЛА на основе анализа различий (взаимных смещений) эталонной и текущей карт местности мерного участка. Управляют движением ЛА путем коррекции его местоположения. В данном КЭСН траектория движения ЛА разделена на автономный участок (наблюдение) и участок коррекции без их возможного сочетания.
Недостатки способа [1] следующие:
- низкая скрытность, обусловленная значительным уровнем мощности, излучаемой импульсным радиовысотомером;
- выработка сигнала коррекции только после пролета всего мерного участка;
- низкая точность составления текущей карты с использованием одного луча, поскольку для измерения высоты до исследуемой местности ширина луча радиоволн должна быть достаточно широкой, при этом снижается точность определения дальности до отдельных точек поверхности и, соответственно, снижается точность составления текущей карты;
- отсутствие информации о текущем местоположении ЛА в процессе движения над мерным участком, поскольку обработка измеренной информации осуществляется только после пролета всего мерного участка на участке коррекции.
Известен способ автономной навигации ЛА [2], частично устраняющий недостатки аналога [1], выбранный за прототип.
Реализация способа [2] заключается в составлении текущей карты путем измерения параметров мерного участка с помощью радиоволн. При этом используемые радиоволны при излучении представляют собой лучи, которые воздействуют на исследуемую поверхность последовательно, число используемых лучей радиоволн определяется допустимым временем измерения местоположения ЛА при движении над мерным участком исследуемой поверхности (увеличение количества лучей ведет к существенному увеличению покупаемой информации за один такт измерения, что уменьшает время измерений местоположения ЛА).
Определяют местоположение ЛА в плановых координатах мерного участка на основе измерений наклонных дальностей, сигнал коррекции вычисляют в соответствии с дифференциально-разностным алгоритмом обработки многолучевых измерений (ДРАОМИ).
Недостатки способа [2] следующие:
- низкая скрытность работы;
- низкие быстродействие и точность определения текущего местоположения ЛА в процессе его движения над мерным участком, включая движение с повышенными скоростями;
- ограничения высоты полета ЛА над мерным участком.
Причиной приведенных выше недостатков способа [2] является последовательный переход излучения и приема радиоволн с одного луча на другой луч, при котором за время излучения и приема по одному лучу ЛА перемещается относительно отражающей поверхности и в результате при излучении и приеме радиоволн по другим лучам пятно засветки, дальность до которого определяется, оказывается смещено вперед по курсу полета ЛА. Это приводит к зависимости точности определения текущего местоположения ЛА от длительности излучаемых радиоволн и скорости его движения. Время нахождения рельефометрической системы в режиме излучения при прохождении мерного участка равно суммарному времени излучения по лучам, что снижает скрытность ее работы.
С увеличением высоты полета ЛА возрастает требование к энергетическому потенциалу рельефометрической системы, реализация которого в рамках способа [2] при сохранении импульсной мощности излучаемых в каждом луче радиоволн возможна только за счет увеличения их длительности, однако это, как было сказано выше, приведет к росту ошибки определения местоположения ЛА над мерным участком.
Со снижением высоты полета ЛА возрастает требование к величине «мертвой» зоны рельефометрической системы, реализация которого в рамках способа [2] возможна при уменьшении длительности радиоволн, излучаемых в каждом луче, и повышении скорости перехода рельефометрической системы как из режима излучения радиоволн в режим приема отраженных радиоволн в пределах одного луча, так и перехода с одного луча на другой, что может представлять техническую проблему.
Таким образом, последовательный переход излучения и приема радиоволн с одного луча на другой луч ограничивает скрытность и быстродействие способа навигации [2], а также возможность повышения точности определения местоположения ЛА за счет увеличения количества лучей. При полете ЛА с повышенными скоростями, а также при увеличении высоты его полета за счет повышения длительности излучаемых радиоволн, возрастают ошибки определения местоположения ЛА над мерным участком.
При полете ЛА на низких высотах режим излучения и приема радиоволн по каждому лучу, положенный в основу способа навигации [2], ограничивает диапазон минимальных измеряемых наклонных дальностей.
Техническим результатом предлагаемого изобретения является повышение скрытности и быстродействия способа навигации летательных аппаратов, а также точности определения местоположения летательного аппарата при движении над мерным участком, в том числе с повышенными скоростями и при увеличении диапазона высот при полете летательных аппаратов.
Технический результат достигается тем, что в способе автономной навигации ЛА, включающем определение наклонной дальности ЛА до земной поверхности, заключающемся в излучении радиоволн в виде нескольких лучей и последующем приеме отраженных радиоволн по этим лучам, радиоволны излучают одновременно на одной несущей частоте в виде последовательностей радиоимпульсов, начальные фазы которых модулированы М-последовательностями, ортогональными друг другу. Отраженные радиоволны разделяют по лучам и определяют наклонные дальности летательного аппарата до земной поверхности корреляционным способом с использованием модулирующих М-последовательностей в качестве опорных функций или способом согласованной фильтрации с использованием в качестве весовых коэффициентов кодов, формирующих модулирующие М-последовательности.
Для определения местоположения летательного аппарата при движении с повышенными скоростями и при уменьшении высот его полета радиоволны излучают по нескольким узким лучам, а отраженные радиоволны принимают по одному широкому лучу.
Способ навигации ЛА, включающий, для примера, определение наклонной дальности ЛА до земной поверхности по трем лучам в части формирования излучаемых радиоволн в виде квазинепрерывных последовательностей радиоимпульсов, начальные фазы которых модулированы М-последовательностями, ортогональными друг другу, и разделения отраженных радиоволн при их взаимном перекрытии по времени, поясняется следующими чертежами:
Фигура 1 - принцип работы однолучевой рельефометрической системы;
Фигура 2 - схема расположения лучей летательного аппарата относительно мерного участка земной поверхности для 3-лучевой рельефометрической системы при приеме отраженных волн по трем лучам (а), при приеме отраженных волн по одному широкому лучу (б);
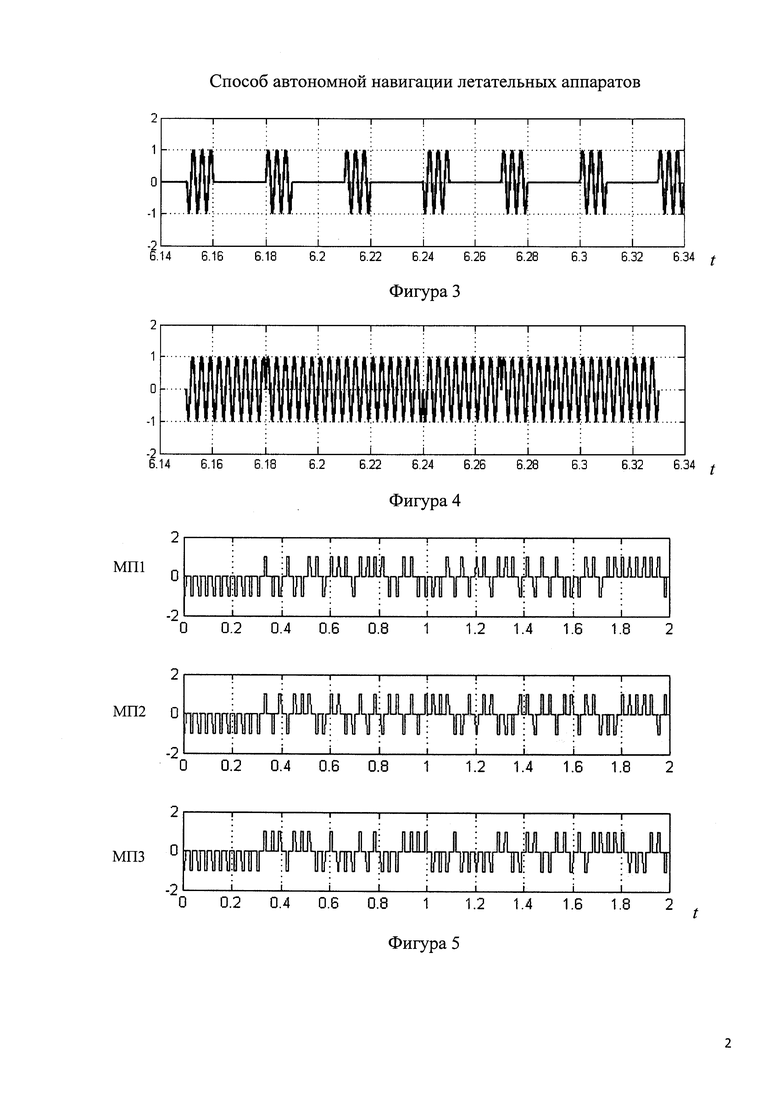
Фигура 3 - излучаемый сигнал в виде квазинепрерывной последовательности радиоимпульсов, начальные фазы которых модулированы М-последовательностью (скважность Q=3);
Фигура 4 - излучаемый сигнал в виде непрерывной последовательности радиоимпульсов, начальные фазы которых модулированы М-последовательностью (скважность Q=1);
Фигура 5 - ортогональные модулирующие М-последовательности МП1, МП2 и МП3 (начальные участки);
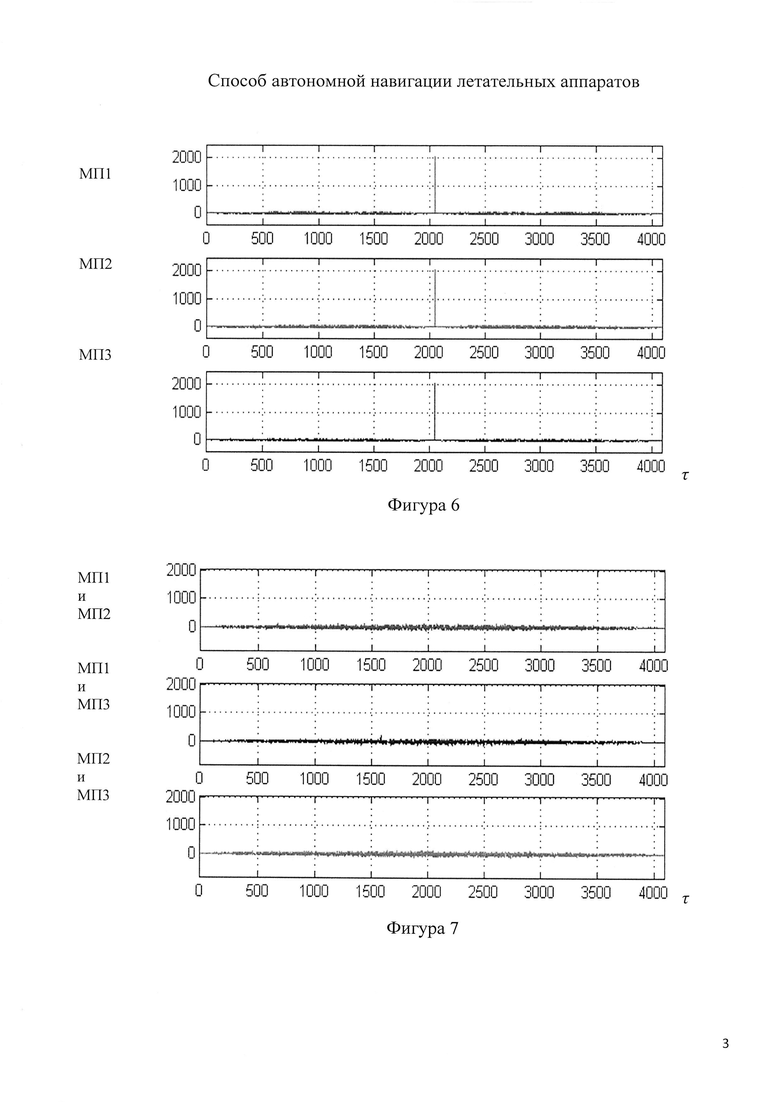
Фигура 6 - графики автокорреляционных функций М-последовательностей трех лучей МП1, МП2 и МП3;
Фигура 7 - графики взаимно-корреляционных функций последовательностей МП1 и МП2, МП1 и МП3, МП2 и МП3;
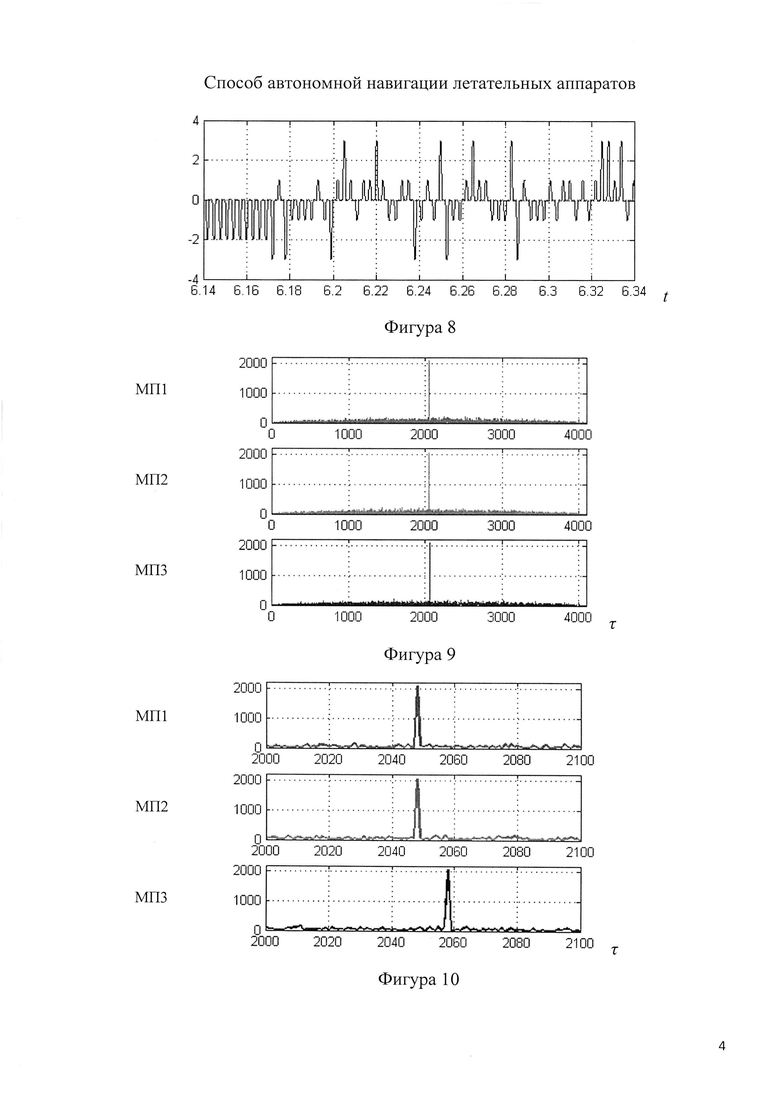
Фигура 8 - огибающая суммарного сигнала трех лучей;
Фигура 9 - графики корреляционных функций суммарного сигнала трех лучей после выделения его огибающей и опорных последовательностей МП1, МП2, МП3;
Фигура 10 - графики корреляционных функций фигуры 8 в окрестностях корреляционных максимумов.
Способ навигации ЛА, включающий, для примера, определение наклонной дальности ЛА до земной поверхности по трем лучам, осуществляется следующим образом.
В бортовую аппаратуру перед движением ЛА заносят эталонную карту местности, на которой выбирают необходимый участок местности, представляющий собой мерный участок. Составляют текущую карту путем измерения параметров мерного участка с помощью радиоволн в виде трех лучей.
Лучи радиоволн излучают, как показано на фиг. 2,а, следующим образом.
Луч 1 имеет направление распространения в плоскости, ортогональной плоскости горизонта исследуемой поверхности, луч 2 имеет направление распространения слева по направлению движения ЛА от луча 1, а луч 3 - справа по направлению движения ЛА от луча 1, причем все лучи располагают в одной плоскости. Во всех лучах радиоволны излучают одновременно на одной частоте в виде квазинепрерывных последовательностей радиоимпульсов с скважностью Q=3 (фиг. 3), начальные фазы которых модулированы ортогональными М-последовательностями МП1, МП2, МП3 (фиг. 5). В луче 1 излучают и принимают радиоволны в виде квазинепрерывной последовательности радиоимпульсов, начальные фазы которых модулированы М-последовательностью МП1, в луче 2 - МП2, в луче 3 - МП3. Корреляционные функции квазинепрерывных последовательностей радиоимпульсов всех трех лучей показаны на фиг. 6 и фиг. 7. Как видно на графиках фиг. 6, автокорреляционные функции, соответствующие М-последовательностям МП1, МП2 и МП3, имеют единственный максимум, численное значение которого равно количеству импульсов в М-последовательностях. При этом взаимно-корреляционные функции (фиг. 7) рассматриваемых М-последовательностей не имеют корреляционных максимумов. Таким образом, из суммарной последовательности все три М-последовательности лучей могут быть разделены и идентифицированы корреляционным способом (фиг. 9). Разделение лучей возможно также способом согласованной фильтрации, эквивалентным рассмотренному выше корреляционному способу [3], при котором в качестве весовых коэффициентов используют коды, формирующие ортогональные М-последовательности.
При уменьшении высоты полета радиоволны в лучах излучают в виде непрерывной последовательности радиоимпульсов, начальные фазы которых модулированы М-последовательностью (скважность Q=1) (фиг. 4), прием отраженных волн проводится по одному широкому лучу, как показано на фиг. 2,б, при этом излучение и прием радиоволн возможны с перекрытием по времени. Определяют местоположение ЛА на основе полученных с помощью лучей радиоволн измерений наклонных дальностей, сигнал коррекции вычисляют в соответствии с дифференциально-разностным алгоритмом обработки многолучевых измерений (ДРАОМИ), предложенным и рассмотренным в [2].
В результате способ навигации позволяет получать информацию, необходимую для определения текущего местоположения ЛА и управления движением ЛА, за время излучения и приема радиоволн по одному лучу, а не за время прохождения всего мерного участка эталонной карты, как это сделано в аналоге [1], и не за суммарное время излучения и приема радиоволн по всем лучам, как это сделано в прототипе [2].
Одновременное излучение в каждом луче радиоволн в виде последовательностей радиоимпульсов, начальные фазы которых модулированы ортогональными М-последовательностями, позволяет, по сравнению с прототипом:
- повысить скрытность работы навигационной системы за счет сокращения в N раз времени излучения, где N - количество лучей;
- обеспечить работоспособность навигационной системы при увеличении высоты полета ЛА за счет повышения ее энергетического потенциала;
- обеспечить работоспособность навигационной системы при уменьшении высоты полета ЛА за счет излучения радиоволн узкими лучами и приема отраженных радиоволн по одному широкому лучу;
- повысить быстродействие навигационной системы;
- обеспечить точность определения местоположения ЛА при движении с повышенными скоростями;
- повысить точность определения местоположения ЛА за счет увеличения количества лучей.
Таким образом, способ навигации летательных аппаратов обладает рядом существенных преимуществ перед прототипом и аналогом.
Литература
1. Ржевкин В.А. Автономная навигация по картам местности // Зарубежная радиоэлектроника. 1981, №10. С.3-28.
2. Патент РФ №2284544. Способ навигации летательных аппаратов / Хрусталев А.А., Кольцов Ю.В., Рындык А.Г., Плужников А.Д., Потапов Н.Н., Егоров С.Н.; приоритет от 30.05.2005.
3. С.В. Катин, В.А. Козлов, Ю.М. Куликов, А.Л. Кунилов. Принципы проектирования средств цифровой обработки сигналов бортовых РЛС, реализующих оптимальные или близкие к оптимальным алгоритмы в реальном масштабе времени // Физика волновых процессов и радиотехнические системы. Том 14, №2. 2011. С.53-57.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОНОМНОЙ НАВИГАЦИИ МАЛОВЫСОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2018 |
|
RU2691124C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2018 |
|
RU2681303C1 |
| Способ навигации летательных аппаратов и устройство для его осуществления | 2019 |
|
RU2707269C1 |
| Способ навигации летательных аппаратов по линейным поверхностным ориентирам | 2024 |
|
RU2838439C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2005 |
|
RU2284544C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2471152C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2024 |
|
RU2836616C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2020 |
|
RU2739872C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2007 |
|
RU2340874C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2007 |
|
RU2338158C1 |
Изобретение относится к области радиолокационной техники и может быть использовано при построении радиолокационных рельефометрических систем, предназначенных для определения местоположения летательных аппаратов (ЛА) с использованием радиоволн. Достигаемый технический результат изобретения - повышение скрытности и быстродействия способа навигации летательных аппаратов, а также точности определения местоположения летательного аппарата при движении над мерным участком. В способе автономной навигации ЛА, включающем определение наклонной дальности ЛА до земной поверхности, заключающемся в излучении радиоволн в виде нескольких лучей и последующем приеме отраженных радиоволн по этим лучам, радиоволны излучают одновременно на одной несущей частоте в виде последовательностей радиоимпульсов, начальные фазы которых модулированы М-последовательностями, ортогональными друг другу. Отраженные радиоволны разделяют по лучам и определяют наклонные дальности летательного аппарата до земной поверхности корреляционным способом с использованием модулирующих М-последовательностей в качестве опорных функций или способом согласованной фильтрации с использованием в качестве весовых коэффициентов кодов, формирующих модулирующие М-последовательности. 10 ил.
Способ автономной навигации летательных аппаратов, включающий определение наклонной дальности летательного аппарата до земной поверхности, заключающийся в излучении радиоволн в виде нескольких лучей и последующем приеме отраженных радиоволн по этим лучам, отличающийся тем, что радиоволны излучают одновременно на одной несущей частоте в виде последовательностей радиоимпульсов, начальные фазы которых модулированы М-последовательностями, ортогональными друг другу, отраженные радиоволны разделяют по лучам и определяют наклонные дальности летательного аппарата до земной поверхности корреляционным способом с использованием модулирующих М-последовательностей в качестве опорных функций или способом согласованной фильтрации с использованием в качестве весовых коэффициентов кодов, формирующих модулирующие М-последовательности.
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2005 |
|
RU2284544C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ЗЕМЛЕЙ | 1993 |
|
RU2124760C1 |
| СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ О ПЕРЕМЕЩЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2436047C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ РАЗЛИЧНЫХ КЛАССОВ (ВАРИАНТЫ) | 1999 |
|
RU2182313C2 |
| US 6760664 B1, 06.07.2004 | |||
| US 5995043 A, 30.11/1999 | |||
| WO 2006135916 A1, 21.12.2006. | |||

