Изобретение относится к автономным бортовым комплексам определения местоположения летательного аппарата (ЛА) и может быть использовано при проектировании систем управления ЛА для повышения точности навигации.
Как правило, основой навигационного комплекса ЛА служат инерциальные навигационные системы (ИНС) [1, стр.71-85], характерной особенностью которых является квадратичный закон увеличения ошибки определения местоположения ЛА с течением времени. Для коррекции указанных ошибок с целью увеличения времени автономного полета ЛА в навигационных комплексах используются радиолокационные средства измерения параметров движения относительно подстилающей земной поверхности [2, стр.324-326]. Такими средствами служат обычно радиовысотомер (РВ) и доплеровский измеритель скорости и угла сноса (ДИСС). Данные ДИСС позволяют значительно уменьшить ошибку определения местоположения. Однако размещение этого прибора, особенно на малоразмерном ЛА, затруднительно. Это обусловлено тем, что для точного измерения вектора скорости с помощью ДИСС требуются антенные системы довольно большого размера. То же можно сказать и при замене ДИСС корреляционным измерителем скорости и сноса (КИСС) [2, стр.250-254]. В этом случае для точного измерения угла сноса необходим значительный поперечный разнос приемных антенн. По этой причине в бортовой системе управления [3] вообще не используется радиолокационный датчик скорости, что, конечно, может существенно ограничить ее возможности.
Применение для коррекции ИНС спутниковой навигационной системы (СНС), как это сделано в [1, стр.77], лишает бортовую систему автономности и снижает ее эффективность в случае подавления или отключения СНС.
В [4] для коррекции ИНС используются данные, получаемые когерентной бортовой моноимпульсной радиолокационной системой (БМРЛС) бокового обзора с синтезированием апертуры. При этом БМРЛС получает радиолокационное изображение (РЛИ) подстилающей поверхности. При сопоставлении полученного РЛИ с эталонным, которое загружается в память навигационной системы при подготовке полета, определяется уточненное местоположение ЛА и вычисляются ошибки ИНС. Недостаток такой системы заключается, во-первых, в сложности получения достоверных эталонов, во-вторых, над водной поверхностью такая система не работоспособна.
Следует отметить, что во все приведенные системы управления полетом [1, 3, 4] входит БМРЛС как основной информационный датчик, обеспечивающий выполнение задачи полета ЛА. Предлагаемый способ коррекции ИНС по скорости заключается в определении с помощью БМРЛС геометрического положения ярких точек подстилающей поверхности с одновременным измерением доплеровского смещения частоты отраженных этими точками сигналов. Исходными данными для вычисления ошибки ИНС при этом является разность измеренных доплеровских частот ярких точек и рассчитанных доплеровских частот по геометрическому положению этих точек с использованием вектора скорости ИНС. Так как ошибка ИНС изменяется медленно, то это позволяет производить ее оценку за сравнительно большое время и даже при изменяющейся траектории ЛА. Привязка доплеровского смещения частоты к конкретным ярким точкам позволяет избежать основного недостатка ДИСС, а именно наличия систематической ошибки измерения, обусловленной зависимостью среднего доплеровского смещения частоты в пятне засветки от вида подстилающей поверхности, так называемый «морской эффект» [2]. Частично преодолевается и другая проблема, связанная со значительным уменьшением уровня отраженного от водной поверхности сигнала при увеличении угла падения. Одновременное разрешение по доплеровской частоте и дальности позволяет выделить наиболее яркие разрешаемые элементы. При этом, хотя средний уровень сигнала остается низким, отношение сигнал/шум для ярких элементов может быть достаточным для измерения их координат.
Заявленная цель достигается тем, что в способе определения ошибки измерения скорости ЛА инерциальной навигационной системой, включающем зондирование земной поверхности сверхвысокочастотными электромагнитными сигналами в нескольких направлениях с изменением азимута и угла места с модуляцией, позволяющей производить измерение времени запаздывания и доплеровского смещения частоты сигналов, отраженных разрешаемыми элементами поверхности, согласно изобретению производится когерентный прием отраженных сигналов, селектированный по угловым координатам с образованием моноимпульсных суммарного и разностных азимутального и угломестного каналов в нормальной системе координат ИНС [5]. По каждому из каналов получается комплексное радиолокационное изображение (РЛИ) облучаемой поверхности в координатах доплеровское смещение частоты - дальность при зондировании в каждом i-том из направлений, i=1…I, I≥3. По РЛИ суммарного канала каждого направления зондирования находятся наиболее яркие точки с определением их дальности и доплеровского смещения частоты. Вычисляются с использованием РЛИ разностных каналов азимут и угол места выделенных ярких точек. По полученным радиолокационным данным и данным ИНС вычисляются ошибки измерения скорости ИНС. Выделение ярких точек на суммарном РЛИ производится следующим образом: вычисляется яркостное РЛИ, равное квадрату модуля комплексного РЛИ суммарного канала, вычисляется пороговый уровень, равный увеличенному в 20 раз среднему значению шумового яркостного РЛИ, полученному при наличии в принятом сигнале только собственных шумов приемника, определяются точки абсолютного и локальных максимумов яркостного РЛИ и сравниваются с пороговым уровнем, в случае превышении которого выделенные максимумы считаются яркими точками. Азимут βk и угол места εk k-той яркой точки рассчитываются по формулам


где  ,
,  ,
,  , - комплексные амплитуды k-той яркой точки в суммарном, разностном азимутальном и разностном угломестном РЛИ, χβ, χε - комплексные калибровочные коэффициенты азимутальной и угломестной пеленгационной характеристики, βi, εi - положение равносигнального направления диаграммы направленности в нормальной системе координат ИНС при i-том направлении зондирования.
, - комплексные амплитуды k-той яркой точки в суммарном, разностном азимутальном и разностном угломестном РЛИ, χβ, χε - комплексные калибровочные коэффициенты азимутальной и угломестной пеленгационной характеристики, βi, εi - положение равносигнального направления диаграммы направленности в нормальной системе координат ИНС при i-том направлении зондирования.
При полете над ровной горизонтальной или водной поверхностью угол места k-той яркой точки εk можно определять по формуле

где Hi - высота полета при i-том направлении зондирования, Dk - дальность до k-той яркой точки.
Ошибка измерения скорости ИНС ΔV определяется по формуле

где Р - матрица, размерностью 3×К, преобразования вектора невязки в вектор ошибки измерения скорости, К - суммарное число ярких точек по всем направлениям зондирования;

R - матрица координат ярких точек, размерностью К×3, k-тая строка которой соответствует транспонированному вектору направления на k-тую яркую точку 
λ - длина волны зондирующего сигнала; ΔF - вектор невязки размерностью 1×К, k-тый элемент которого равен  , где Fk - доплеровское смещение частоты k-той яркой точки,
, где Fk - доплеровское смещение частоты k-той яркой точки,  - вектор скорости, определяемый ИНС во время зондирования в i-том направлении; I - единичная матрица,
- вектор скорости, определяемый ИНС во время зондирования в i-том направлении; I - единичная матрица,
Заявленная цель достигается также тем, что в навигационный комплекс, содержащий последовательно соединенные ИНС и бортовую цифровую вычислительную машину, к третьему входу которой подключен радиовысотомер (РВ), выход БЦВМ подключается к входу ИНС, дополнительно вводится когерентная бортовая моноимпульсная радиолокационная система (БМРЛС) с переднебоковым обзором. Вход БМРЛС подключен ко второму выходу БЦВМ, с которого на БМРЛС поступают данные об ориентации ЛА в нормальной системе координат ИНС [5] в виде углов крена γi, тангажа ϑi и рыскания ψi, с учетом которых устанавливается положение равносигнального направления антенной системы βi и εi во время зондирования в каждом i-том направлении, выход БМРЛС подключен к первому входу БЦВМ, куда поступают полученные в результате зондирования доплеровские смещения и угловые координаты ярких точек Fk, βk и εk, при этом на третий вход БЦВМ с выхода РВ поступает значение высоты Hi, соответствующее i-тому направлению зондирования, а на второй вход с выхода ИНС подаются углы крена γi, тангажа ϑi и рыскания ψi, определяющие ориентацию строительных осей ЛА в нормальной системе координат ИНС, и вектор скорости, измеряемый ИНС,  , при зондировании в i-том направлении; после зондирования во всех направлениях в БЦВМ вычисляется ошибка измерения вектора скорости в ИНС ΔV, которая с первого выхода БЦВМ подается на вход ИНС для ее коррекции.
, при зондировании в i-том направлении; после зондирования во всех направлениях в БЦВМ вычисляется ошибка измерения вектора скорости в ИНС ΔV, которая с первого выхода БЦВМ подается на вход ИНС для ее коррекции.
Сущность предлагаемого решения поясняется дальнейшим описанием, чертежами и диаграммами.
Фиг.1 - структурная схема навигационного комплекса.
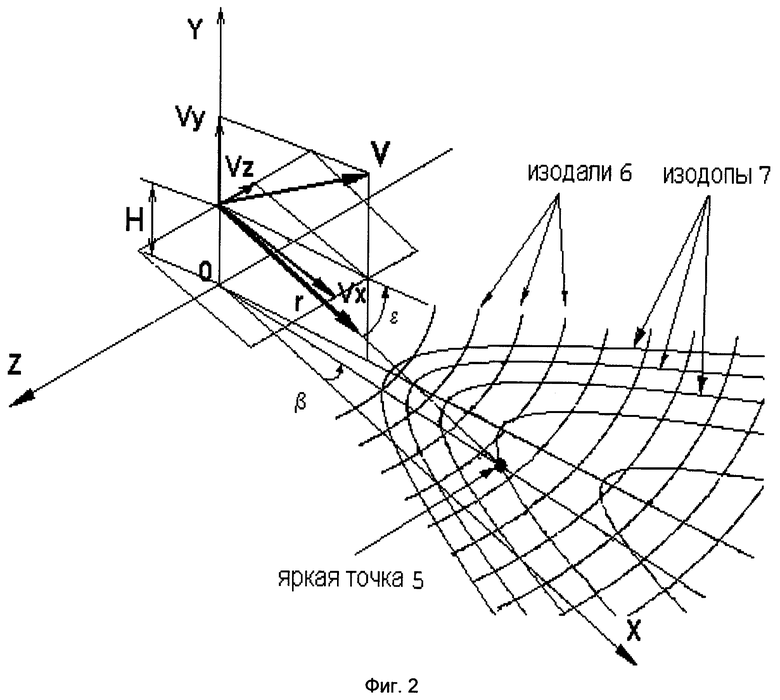
Фиг.2 - геометрия зондирования подстилающей поверхности.
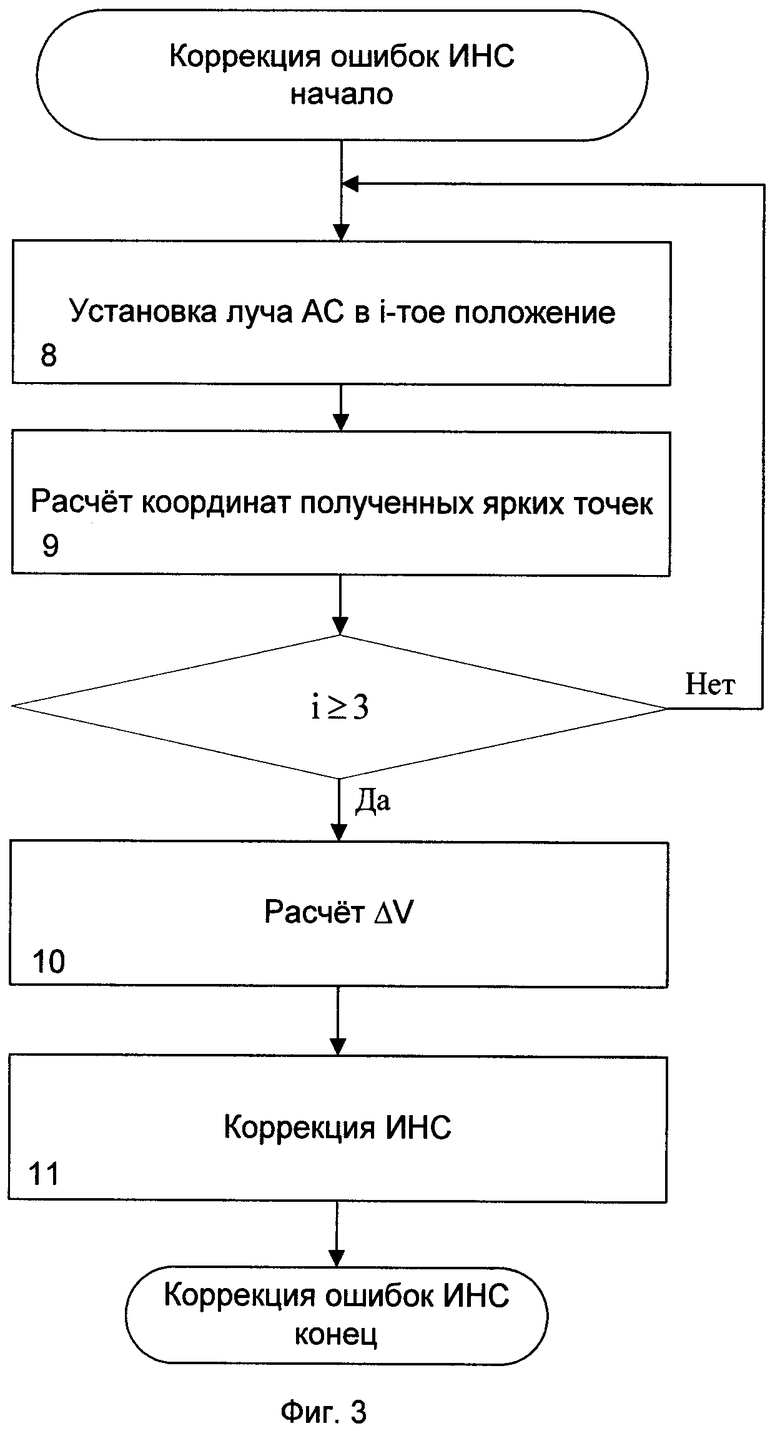
Фиг.3 - алгоритм оценивания ошибок ИНС.
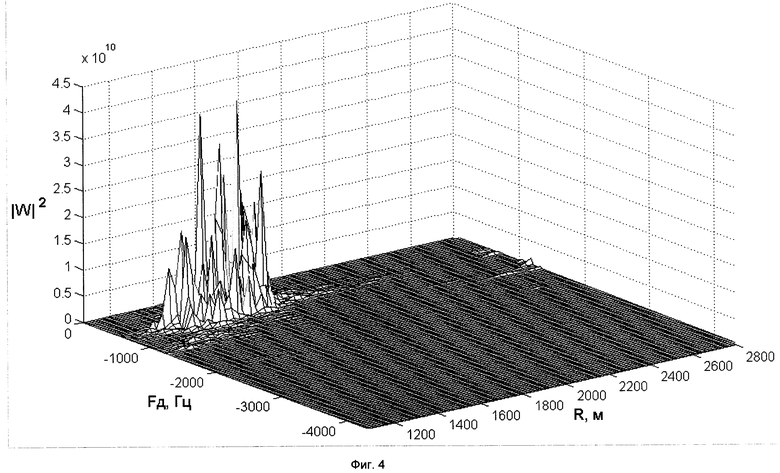
Фиг.4 - РЛИ суши.
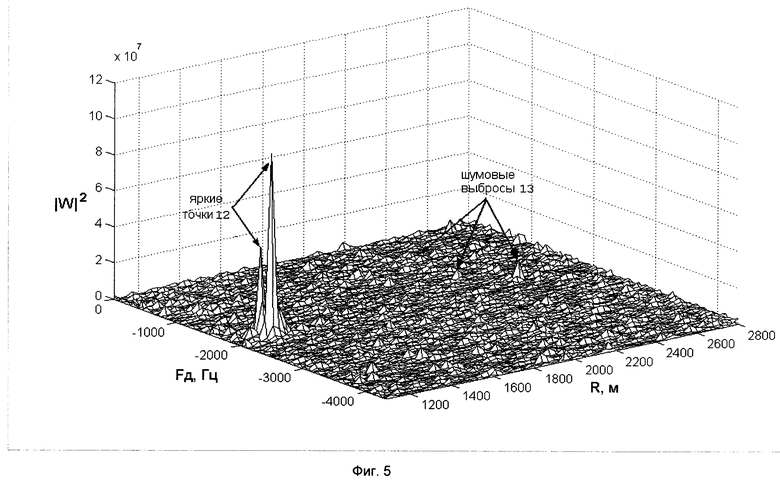
Фиг.5 - РЛИ водной поверхности.
На фиг.1 представлена структурная схема навигационного комплекса, на которой приняты следующие обозначения:
1 - бортовая моноимпульсная радиолокационная система (БМРЛС);
2 - бортовая цифровая вычислительная машина (БЦВМ);
3 - инерциальная навигационная система (ИНС);
4 - радиовысотомер (РВ).
На структурной схеме навигационного комплекса (фиг.1): последовательно соединенные БМРЛС 1, БЦВМ 2, ИНС 3, выход ИНС 3 подключен ко второму входу БЦВМ 2, второй выход которой подключен к входу БМРЛС 1, к третьему входу БЦВМ 2 подключен РВ 4.
БМРЛС 1 зондирует подстилающую поверхность в трех направлениях с получением суммарного и разностных РЛИ различных ее участков. БМРЛС 1 должна обеспечивать когерентный прием отраженных сигналов, измерение дальности и доплеровского смещения частоты. Это может осуществляться различными способами, приводимыми, например, в [6, стр.368, 369]. Построение моноимпульсной антенной системы, обеспечивающей прием по суммарному и разностным каналам, описано в [7, стр.16-30]. В результате зондирования выделяются наиболее яркие точки РЛИ суммарного канала, определяется их дальность и доплеровское смещение частоты и вычисляются азимуты и углы места в нормальной системе координат ИНС 3. Эти данные подаются в БЦВМ 2. Здесь следует отметить, что для получения РЛИ в указанных координатах БМРЛС 1 должна работать в режиме доплеровского обужения луча (ДОЛ) [8, стр.85, 86]. В этом режиме доплеровское смещение частоты выделяемой яркой точки можно считать постоянным в течение зондирования в данном направлении. При смене направления зондирования должен изменяться не только азимут, но и угол места хотя бы в одном из направлений не менее чем на ширину диаграммы направленности антенны. Параметры ориентации ЛА в пространстве, т.е. углы крена γi, тангажа ϑi и рыскания ψi, определяются в ИНС 3 и подаются в БМРЛС 1 для учета при установке антенной системы. При полете над ровной горизонтальной поверхностью, когда вычисление угла места производится по (3), наличие разностного угломестного канала необязательно. Измерение высоты при этом обеспечивается РВ 4. В БЦВМ 2 по результатам зондирования во всех направлениях производится вычисление ошибок ИНС 3 определения вектора скорости.
На фиг.2 представлена геометрия зондирования подстилающей поверхности. ЛА находится в точке с координатами: Х=0, Z=0, Y=Н. Подстилающая поверхность совпадает с плоскостью XOZ. Координаты яркой точки 5 в системе доплеровское смещение частоты - дальность определяются соответствующей изодалью 6, а доплеровское смещение частоты - изодопой 7. Изодали образуются линиями пересечения подстилающей поверхности со сферами соответствующих радиусов с центром в точке нахождения ЛА. Изодопы образуются пересечением подстилающей поверхности с конусами, ось которых совпадает с направлением вектора скорости V ЛА. Вектор r определяет направление на яркую точку 5.
На фиг.3 приведен алгоритм коррекции ошибок ИНС.
8 - установка луча антенны БМРЛС в i-тое положение. При этом значения углов βi и εi должны обеспечивать режим ДОЛ [8, стр.84], обусловленный выполнением условия

где tc - время зондирования поверхности (время синтезирования), обуславливающее разрешающую способность БМРЛС по доплеровскому смещению частоты, λ - длина волны зондирующего сигнала, D - дальность.
Установка антенной системы производится в связанной системе координат [5]. Азимут βic и угол места εic в связанной системе координат, определяющие положение линии визирования в этой системе координат, рассчитываются по формулам


где  и
и  - векторы-строки выбора составляющих вектора визирования в связанной системе координат;
- векторы-строки выбора составляющих вектора визирования в связанной системе координат; 
- вектор визирования в нормальной системе координат ИНС;

- матрица преобразования вектора из нормальной в связанную систему координат.
Для каждого направления зондирования получается по одному РЛИ для суммарного и разностных каналов. Из РЛИ суммарного канала можно взять несколько наиболее ярких точек и получить систему линейных уравнений для компонент вектора ΔV, однако система будет плохо обусловлена, т.к. вариация углов β и ε будет находиться в пределах сравнительно узкой диаграммы направленности антенны БМРЛС. Поэтому необходимо производить зондирование в нескольких направлениях, изменяя азимут и угол места в возможно более широких пределах, ограниченных условием (6), и брать яркие точки из РЛИ различных направлений. В то же время увеличение общего числа используемых ярких точек также приводит к уменьшению ошибки измерения. В режиме ДОЛ при зондировании поверхности пачкой импульсных сигналов РЛИ может быть получено путем согласованного приема каждого отраженного импульса (сжатие по дальности) с последующей доплеровской межпериодной фильтрацией сигнала от каждого разрешаемого элемента дальности (быстрое преобразование Фурье отсчетов одной дальности по периодам повторения).
9 - выделение ярких точек и расчет угловых координат. В качестве ярких точек берутся локальные максимумы суммарного РЛИ, превышающие порог обнаружения, устанавливаемый на уровне отношения сигнал/шум 13 дБ (20 раз). При меньших отношениях резко ухудшается точность пеленгации. Выделение ярких точек на суммарном РЛИ производится следующим образом: вычисляется яркостное РЛИ, равное квадрату модуля комплексного РЛИ суммарного канала, вычисляется пороговый уровень, равный увеличенному в 20 раз среднему значению шумового яркостного РЛИ, полученному при наличии в принятом сигнале только собственных шумов приемника, определяются точки абсолютного и локальных максимумов яркостного РЛИ и сравниваются с пороговым уровнем, в случае превышения которого выделенные максимумы считаются яркими точками. Угловые координаты ярких точек вычисляются по формулам (1) и (2). После окончания зондирования в 3-х или более направлениях производится расчет ΔV.
10 - расчет ΔV. Расчет ΔV по (4) основан на методе линейного оценивания с минимальной среднеквадратической ошибкой [9, стр.49-57]. Вычисления получаются сравнительно простыми, т.к. размерность обращаемой матрицы получается 3×3.
11 - коррекция ИНС. Процедура коррекции может выполняться способами, рекомендованными, например, в [10, стр.217].
Предлагаемый способ коррекции вектора скорости был исследован с помощью математического моделирования полета над различными типами поверхностей. Результаты моделирования показали, что модуль вектора скорости может быть уточнен до 0,1-0,3%, а угол сноса - до 10-15', в зависимости от точностных характеристик антенной системы.
Проводились также летные испытания БМРЛС, в результате которых были определены уровни отраженных сигналов от различных поверхностей.
На фиг.4 приводится РЛИ участка суши с поверхностью типа луг с кустарником. РЛИ получено при испытаниях когерентной моноимпульсной БМРЛС сантиметрового диапазона. Полет проводился на высоте 50 м со скоростью около 50 м/с. Здесь следует отметить, что РЛИ представляет собой набор ярких точек.
На фиг.5 приводится РЛИ водной поверхности. Условия полета те же. Скорость ветра у поверхности не превышала 1 м/с, и волнение практически отсутствовало. Хотя уровень отраженного в сторону БМРЛС сигнала для такой поверхности очень мал (на 40 дБ меньше, чем над сушей), на РЛИ присутствуют яркие точки 12, значительно превышающие шумовые выбросы 13.
Таким образом, результаты математического моделирования и летные испытания БМРЛС показывают высокую эффективность предлагаемого способа компенсации ошибок ИНС и возможность построения навигационного комплекса, реализующего этот способ.
Литература
1. Авиационные системы управления. Том 2. Радиоэлектронные системы самонаведения. Под ред. А.И.Канащенкова и В.И.Меркулова. - М.: Радиотехника, 2003.
2. Винницкий А.С. Автономные радиосистемы. - М.: Радио и связь, 1986.
3. Патент РФ №2207613.
4. Патент США №5485384.
5. ГОСТ 20058-80. Динамика летательного аппарата в атмосфере.
6. Справочник по радиолокации. Под ред. М.Сколника. Том 3. - М.: Сов. Радио, 1978.
7. Справочник по радиолокации. Под ред. М.Сколника. Том 4. - М.: Сов. Радио, 1978.
8. Радиолокационные станции с цифровым синтезированием апертуры антенны. Под ред. В.Т.Горяинова. - М.: Радио и связь, 1988.
9. Брамер К., Зиффлинг Г. Фильтр Калмана-Бьюси. - М.: Наука, 1982.
10. Авиационные системы управления. Том 3. Системы командного радиоуправления. Автономные и комбинированные системы наведения. Под ред. А.И.Канащенкова и В.И.Меркулова. - М.: Радиотехника, 2004.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОДНОЛУЧЕВОГО ИЗМЕРЕНИЯ ВЫСОТЫ И СОСТАВЛЯЮЩИХ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2550081C2 |
| СПОСОБ ОДНОЛУЧЕВОГО ИЗМЕРЕНИЯ ВЫСОТЫ И СОСТАВЛЯЮЩИХ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2551896C2 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ, ИСТИННОЙ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И НАКЛОНА ВЕКТОРА СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ГОРИЗОНТА, УСТРОЙСТВО БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ, ИСПОЛЬЗУЮЩЕЕ СПОСОБ | 2016 |
|
RU2643168C2 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ С ИСПОЛЬЗОВАНИЕМ ЦИФРОВЫХ МОДЕЛЕЙ МЕСТНОСТИ | 2007 |
|
RU2364887C2 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПО КАРТЕ ВЫСОТ МЕСТНОСТИ И СИСТЕМА НАВИГАЦИИ, ИСПОЛЬЗУЮЩАЯ СПОСОБ | 2016 |
|
RU2654955C2 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ | 2011 |
|
RU2483324C1 |
| СПОСОБ ОЦЕНКИ ВЫСОТЫ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ | 2012 |
|
RU2499279C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ | 2014 |
|
RU2564552C1 |
| Способ оценки радиальной скорости объекта | 2018 |
|
RU2696084C1 |
| Способ высокоточного определения высоты полета низколетящей цели моноимпульсной РЛС сопровождения | 2021 |
|
RU2779039C1 |
Изобретение относится к навигационным системам летательных аппаратов (ЛА), в состав которых входят инерциальная навигационная система (ИНС) и радиолокационные датчики навигационных параметров ЛА относительно поверхности земли, используемые для коррекции ошибок ИНС. Достигаемым техническим результатом изобретения является повышение точности навигации ЛА без привлечения внешних навигационных средств, таких, например, как спутниковая навигационная система (СНС). Указанный результат достигается путем использования для коррекции ИНС по скорости данных, получаемых когерентной бортовой радиолокационной системой (БРЛС) моноимпульсного типа с переднебоковым обзором. Такая БРЛС способна получать радиолокационное изображение (РЛИ) подстилающей поверхности, пеленговать яркие точки РЛИ по азимуту и углу места с одновременным измерением соответствующего им доплеровского смещения частоты. Использование этих данных совместно с данными ИНС позволяет вычислять ошибки ИНС по определению всех трех компонентов вектора скорости ЛА. При этом исключаются ошибки, присущие доплеровским измерителям скорости, обусловленные влиянием отражающих свойств подстилающей поверхности. 2 н.п. ф-лы, 5 ил.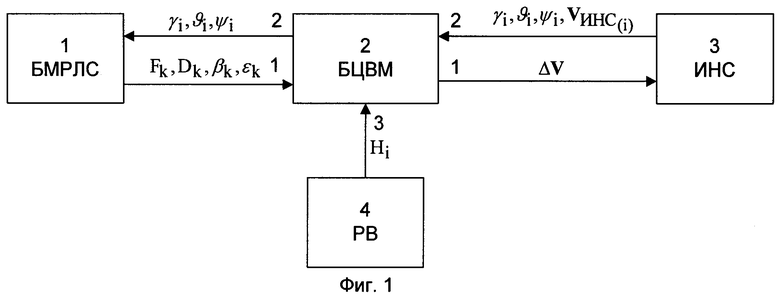
1. Способ определения ошибки измерения скорости летательного аппарата (ЛА) инерциальной навигационной системой (ИНС), включающий зондирование земной поверхности сверхвысокочастотными электромагнитными сигналами в нескольких направлениях с изменением азимута и угла места, с модуляцией зондирующего сигнала, позволяющей производить измерение времени запаздывания и доплеровского смещения частоты сигналов, отраженных разрешаемыми элементами поверхности, отличающийся тем, что производится когерентный, селектированный по угловым координатам с образованием моноимпульсных суммарного и разностных азимутального и угломестного каналов в нормальной системе координат ИНС прием отраженных сигналов, получение по каждому из каналов комплексного радиолокационного изображения (РЛИ) облучаемой поверхности в координатах доплеровское смещение частоты - дальность при зондировании в каждом i-м направлении, которые отличаются в азимутальной и угломестной плоскости не менее чем на ширину диаграммы направленности, i=1, …I, I≥3, выделяют на РЛИ суммарного канала каждого направления зондирования наиболее яркие точки путем вычисления яркостного РЛИ, равного квадрату модуля комплексного РЛИ суммарного канала, вычисления порогового уровня, равного увеличенному в двадцать раз среднему значению шумового яркостного РЛИ, полученному при наличии в принятом сигнале только собственных шумов приемника, определения точек абсолютного и локальных максимумов яркостного РЛИ и сравнения с пороговым уровнем, при превышении которого выделенные максимумы считаются яркими точками, при этом определяются их дальности и доплеровские смещения частоты, затем вычисляют, с использованием РЛИ разностных каналов, азимут βk и угол места εk k-й яркой точки, k=1…K, K - общее количество ярких точек, полученное при зондировании во всех направлениях, по формулам
где  ,
,  ,
,  - комплексные амплитуды k-й яркой точки в
- комплексные амплитуды k-й яркой точки в
суммарном, разностном азимутальном и разностном угломестном РЛИ, χβ, χε - комплексные калибровочные коэффициенты азимутальной и угломестной пеленгационной характеристики, β1, ε1 - положение равносигнального направления диаграммы направленности в нормальной системе координат ИНС при i-м направлении зондирования, или, в случае полета над ровной горизонтальной или водной поверхностью, угол места k-й яркой точки εk определяется по формуле

где Нi - высота полета при i-м направлении зондирования; Dk - дальность до k-й яркой точки, при этом ошибка измерения скорости летательного аппарата инерциальной навигационной системой ΔV определяется по формуле

где P - матрица, размерностью ЗхК, преобразования вектора невязки в вектор ошибки измерения скорости, P=(RT·R+I)-1·RT; R - матрица координат ярких точек, размерностью K×3, k-я строка которой соответствует вектору направления на k-ю яркую точку  где λ - длина волны зондирующего сигнала; ΔF - вектор невязки размерностью 1×K, k-й элемент которого равен
где λ - длина волны зондирующего сигнала; ΔF - вектор невязки размерностью 1×K, k-й элемент которого равен  где Fk - доплеровское смещение частоты k-й яркой точки,
где Fk - доплеровское смещение частоты k-й яркой точки,  - вектор скорости, определяемый ИНС во время зондирования в i-м направлении; I - единичная матрица,
- вектор скорости, определяемый ИНС во время зондирования в i-м направлении; I - единичная матрица, 
2. Навигационный комплекс летательного аппарата (ЛА), содержащий инерциальную навигационную систему (ИНС) и бортовую цифровую вычислительную машину (БЦВМ), к третьему входу которой подключен радиовысотомер (РВ), первый выход БЦВМ подключается к входу ИНС, отличающийся тем, что дополнительно вводится когерентная бортовая моноимпульсная радиолокационная система (БМРЛС) с переднебоковым обзором, вход которой подключен ко второму выходу БЦВМ, по которому на БМРЛС поступают данные об ориентации строительных осей ЛА в нормальной системе координат ИНС в виде углов крена γi, тангажа ϑi и рыскания ψi во время зондирования в каждом i-м направлении i=1…I, I≥3, выход БМРЛС подключен к первому входу БЦВМ, куда поступают полученные в результате зондирования земной поверхности доплеровские смещения, дальности и угловые координаты ярких точек Fk, Dk, βk и εk, при этом на третий вход БЦВМ с выхода РВ поступает значение высоты Hi, соответствующее i-му направлению зондирования, а на второй вход с выхода ИНС подаются углы крена γi, тангажа ϑi и рыскания ψi, определяющие ориентацию строительных осей ЛА в нормальной системе координат ИНС, и вектор скорости, измеряемый ИНС,  , при зондировании в i-м направлении; после зондирования во всех направлениях в БЦВМ вычисляется ошибка измерения вектора скорости в ИНС ΔV, которая с первого выхода БЦВМ подается на вход ИНС для ее коррекции.
, при зондировании в i-м направлении; после зондирования во всех направлениях в БЦВМ вычисляется ошибка измерения вектора скорости в ИНС ΔV, которая с первого выхода БЦВМ подается на вход ИНС для ее коррекции.
| US 5485384 А, 16.01.1996 | |||
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОСТРОИТЕЛЯ ВЕРТИКАЛИ И ДАТЧИКОВ СКОРОСТЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2187141C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2170409C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ С ЗЕМЛЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА С УСОВЕРШЕНСТВОВАННОЙ СИСТЕМОЙ ВИЗУАЛИЗАЦИИ | 1999 |
|
RU2211489C2 |
| US 5396425 А, 07.03.1995 | |||
| WO 2008106316 А2, 04.09.2008 | |||
| КОМПОЗИЦИИ И СПОСОБЫ ДЛЯ ВЫДЕЛЕНИЯ, ОБНАРУЖЕНИЯ И АНАЛИЗА КЛЕТОК ПЛОДА | 2020 |
|
RU2834057C2 |

