Изобретение относится к области авиационного приборостроения и может быть использовано для повышения точности решения задач навигации, а именно, определения координат в перспективных навигационных системах беспилотных летательных аппаратов
Известны инерциальные навигационные системы, установленные на борту летательных аппаратов, с автономной коррекцией с использованием информации о рельефе местности (см. 1. Белоглазов И.Н., Джанджгава Г.И., Чигин Г.П. Основы навигации по геофизическим полям. - М.: Наука, 1985. С. 20-25, 30, 45-52; 2. Патент РФ №2161296 от 24.06.1999 г. МПК G01C 21/00).
Инерциальным навигационным системам (ИНС), установленным на летательном аппарате, присущи нарастающие по времени погрешности определения координат и скорости, для компенсации которых используются дополнительные автономные источники информации, сигналы с которых преобразуются с помощью устройств автономной коррекции в сигналы, корректирующие ИНС. Наиболее сложным является полет над морской поверхностью, с полным отсутствием ориентиров и невозможностью использования бортовых источников корректирующей информации. Основное средство автономной навигации над морем - инерциальная навигационная система даже высокого класса точности имеет погрешность порядка 1.8 км за час полета. При продолжительности полета порядка нескольких часов она требует периодической коррекции списания накапливающихся ошибок. В зависимости от вида и протяженности траектории полета может потребоваться от 4 до 10 коррекций ИНС.
Эффективность использования для коррекции ИНС такого апробированного средства как глобальные спутниковые радионавигационные системы может быть поставлена под сомнение вследствие их низкой помехоустойчивости. Наземные радионавигационные системы ограничены дальностью применения, поскольку их опорные системы размещаются либо на побережье, либо на островах, в то время как траектория полета летательного аппарата может проходить в любом месте над акваторией Мирового океана. Применение на этапе маршрутной коррекции навигационных параметров ЛА астронавигационных систем также может оказаться проблематичным, учитывая сложность визирования светил, обусловленную условиями видимости в режиме маловысотного полета над морской поверхностью.
В этих условиях практическую ценность представляет применение для коррекции инерциальных систем управления летательных аппаратов информации о рельефе дна Мирового океана. Данное навигационное поле является устойчивым, помехозащищенным и информативным в силу наличия достаточно протяженных участков дна со сложным рельефом. Дополнительным аргументом в пользу использования данных о поле рельефа дна является наличие картографической информации на отдельные районы мирового океана, полученных при подготовке навигационных геофизических полигонов государственной гидрографической службой. Реализацию измерений данных о поле рельефа дна, их обработку и дальнейшее использование для коррекции бортовых систем управления летательных аппаратов предполагается осуществлять посредством специальных опорных устройств - радиобуев, осуществляющих зондирование поверхности дна Мирового океана.
Известны инерциальные навигационные системы, установленные на борту морских судов, с автономной коррекцией с использованием информации о рельефе дна Мирового океана (см. 3. Клюева С.Ф., Завьялов В.В. Синтез алгоритмов батиметрических систем навигации. - Владивосток: Морской государственный университет, 2013).
Известен также комплекс разведки морских надводных целей (Патент РФ №2554640 18.06.2013, МПК F41G 7/28). Комплекс включает платформу, которую погружают в воду. Перед погружением платформы на подвижный носитель, например, беспилотный летательный аппарат, вводят координаты точки погружения платформы. Платформу снабжают устройствами радиоприема и звукоподводного приема сигналов пункта управления. В качестве подвижного носителя активного сенсора применяют беспилотный летательный аппарат (БЛА) самолетного типа. Технический результат - создание «асимметричной» морской силы, основанной на заблаговременном размещении в ключевых районах акватории Мирового океана необходимого количества средств всепогодной круглосуточной воздушной разведки и целеуказания с их оперативным задействованием по радиосигналу либо программно.
Наиболее близким известным техническим решением является навигационный комплекс летательного аппарата с коррекцией координат ЛА, содержащее ИНС, радионавигационный канал, включающий распределенные в пространстве наземные радиомаяки, приемопередающий блок, блок управления, блок измерения координат, блок сопряжения, также введены блок памяти, блок преобразования кодов, коммутатор, блок формирования корректирующей информации, (см. А.С. СССР №1840219 от 08.08.1986 г., опубл. 20.08.2006 г., МПК G01C 21/00, G01S 13/00)
Задачей предложенного изобретения является коррекция координат ИНС, установленной на борту пилотируемого или беспилотного ЛА в режиме маловысотного полета над морской поверхностью за счет использования информации о рельефе дна морской (водной) поверхности.
Для реализации поставленной задачи в бортовую систему беспилотного летательного аппарата (БЛА) с автономной коррекцией координат, содержащей, инерциальную навигационную систему (ИНС), соединенную входами-выходами с бортовой системой управления, распределенные радиомаяки, связанные через антенны с приемопередающим блоком, соединенным с блоком определения дальности до радиомаяков, бортовая система управления включает блок вычисления поправок к ИНС, блок оценки координат БЛА, блок вычисления координат радиомаяков, соединенный через блок оценки координат БЛА и блоком вычисления поправок к ИНС с вычислителем ИНС, выход блока определения дальности до радиомаяков через запоминающее устройство соединен с блоком вычисления поправок к ИНС, введено запоминающее устройство (ЗУ) карты рельефа дна, радиомаяки выполнены в виде радиобуев, распределенных на морской поверхности, каждый из которых содержит антенну, гидроакустический датчик, соединенный с блоком преобразования амплитуды гидроакустической волны в сигнал времени задержки, микропроцессор, включающий запоминающее устройство и систему синхронизации, при этом гидроакустический датчик соединен с первым входом блока преобразования амплитуды гидроакустической волны в сигнал времени задержки, а выход гидроакустического датчика соединен с первым входом ЗУ микропроцессора, выход блока преобразования амплитуды гидроакустической волны в сигнал времени задержки соединен с вторым входом ЗУ микропроцессора, выход приемопередающего блока подключен к третьему входу ЗУ микропроцесса, выход которого соединен через систему синхронизации с входом гидроакустического датчика и вторым входом блока преобразования амплитуды гидроакустической волны в сигнал времени задержки, причем блок вычисления координат радиобуев представляет собой распределенную рельефометрическую корреляционно-экстремальную навигационную систему (КЭНС).
По существу поставленная задача реализуется с помощью двух основных подсистем: системы для измерения высоты рельефа поверхности дна, и бортового блока приема, обработки информации и коррекции ИНС БЛА
Изобретение поясняется чертежом, где:
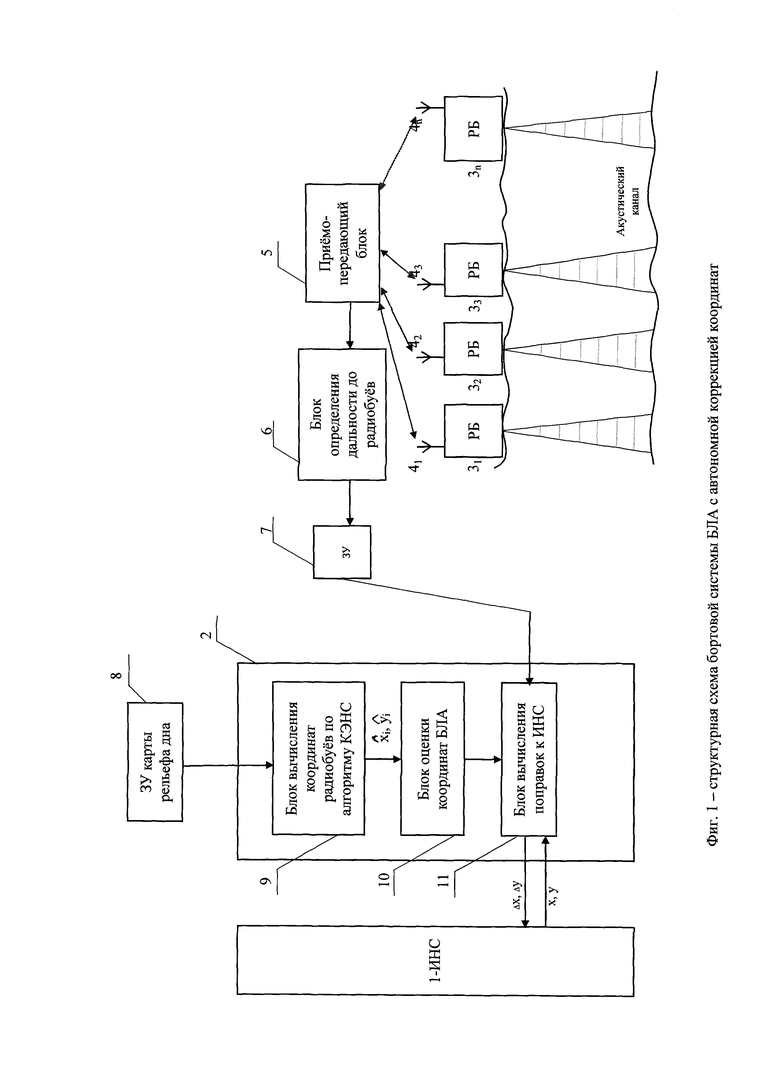
на фиг. 1 - показана структурная схема бортовой системы БЛА с автономной коррекцией координат,
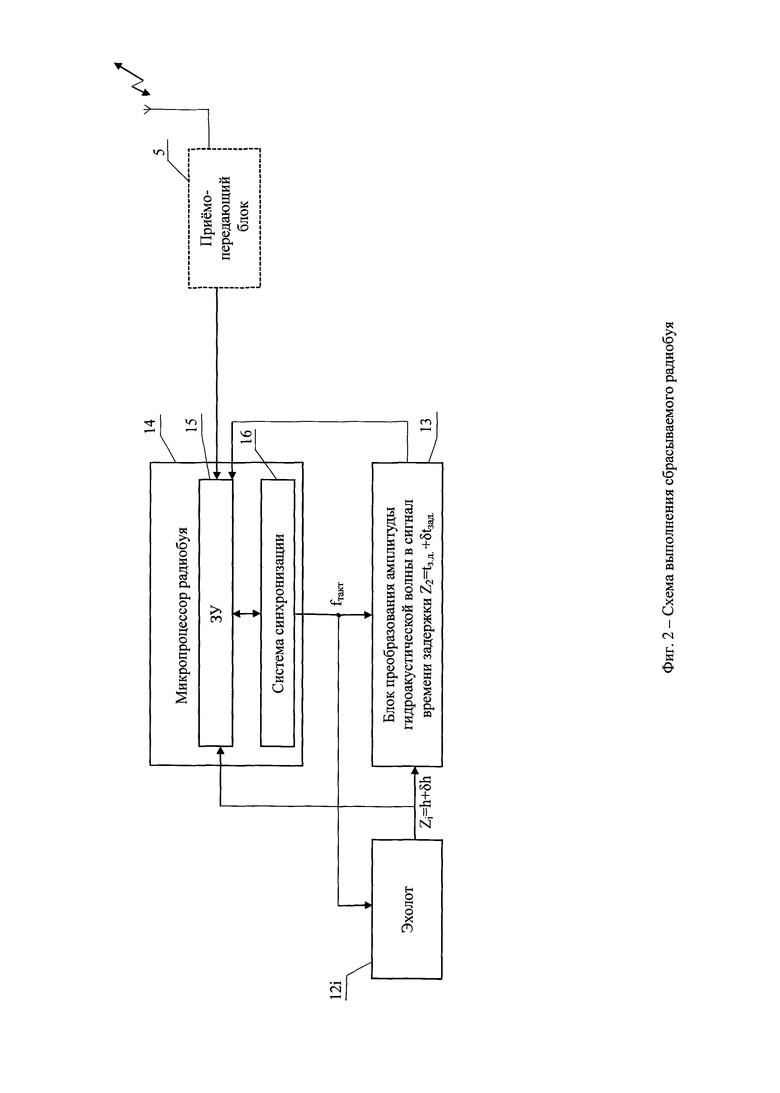
на фиг. 2 - схема выполнения сбрасываемого радиобуя.
Бортовая система БЛА (фиг. 1), содержит ИНС 1 (со спецвычислителем - на чертеже не показан), соединенную входами-выходами с бортовой системой 2 управления БЛА (процессором), радиобуи 31, 32 … 3n, связанные посредством антенн 41, 42 … 4n, с приемопередающим блоком 5, соединенным с блоком 6 определения дальности до радиобуев, выход которого соединен с входом запоминающего устройства (ЗУ) 7. К входу бортовой системы управления 2 подключено ЗУ 8 карты рельефа дна. Бортовая система управления БЛА (процессор) 2 состоит из блока 9 вычисления координат радиобуев, блока 10 оценки координат БЛА, блока 11 вычисления поправок к ИНС 1. Блок 9 вычисления координат радиобуев выполнен в виде рельефометрической КЭНС и соединен через блок 10 оценки координат БЛА и блок 11 вычисления поправок к спецвычислителю ИНС 1 (на чертеже не показан).
Каждый из радиобуев 3i (фиг. 2) содержит гидроакустический датчик (например, эхолот) - 12i где i=от 1 до n (количество эхолотов), блок 13 преобразования амплитуды гидроакустической волны в сигнал времени задержки, микропроцессор 14, с ЗУ 15 и системой синхронизации 16. Выходы гидроакустического датчика-эхолота 12; соединены с первым входом блока 13 преобразования амплитуды гидроакустической волны в сигнал времени задержки и первым входом ЗУ 15 микропроцессора, выход блока 13 соединен с вторым входом ЗУ микропроцессора, третий вход которого подключен к выходу приемопередающего блока 5, ЗУ 15 соединен с системой синхронизации 16 микропроцессора, выход которого подключен к входу гидроакустического датчика - эхолота 12i и второму входу блока 13 преобразования амплитуды гидроакустической волны в сигнал времени задержки. Принципы счисления навигационных параметров, реализуемые в ИНС, приводят к накапливанию со временем ошибок определения координат и скоростей. Для коррекции этих ошибок на маршруте движения БЛА над водной поверхностью предварительно разбрасываются гидроакустические радиобуи. Количество радиобуев может быть различным, но не менее двух. Каждый радиобуй содержит в корпусе две подсистемы - гидроакустическую и радионавигационную. Гидроакустическая подсистема, основанная на принципах эхолокации, предназначена для измерения высоты рельефа поверхности дна под радиобуем. Радионавигационная подсистема радиобуя предназначена для измерения по принципу запрос-ответ совместно с бортовым радиоприемным устройством БЛА расстояния между БЛА и соответствующим радиобуем. Кроме определения расстояния радионавигационный сигнал предназначен для передачи информации о высоте рельефа под радиобуем, относительно которого измеряется расстояние.
ИНС обеспечивает вывод БЛА в район, где были выброшены радиобуи. После достижения района радиобуев с антенны приемопередающего блока излучается сигнал запроса на включение аппаратуры радиобуев. Радионавигационная подсистема - антенна 4i радиобуя 3i переизлучает этот сигнал. После получения ответного сигнала в блоке 6 определения дальности до радиобуев по разности времени излучения запросного и получения ответного сигналов Δτ определяется расстояние Di между БЛА и радиобуем по формуле:
После определения дальности Di до радиобуя и получения информации о высоте рельефа поверхности дна под этим радиобуем и сопоставления этой информации с данными цифровой карты рельефа дна становится возможным определить координаты радиобуев и скорректировать координаты самого БЛА.
После приводнения гидроакустический датчик по команде с микропроцессора включается в работу. Гидроакустический датчик -эхолот является активным элементом системы, излучающим импульсные гидроакустические сигналы. На вход эхолота поступают отраженные гидроакустические сигналы zi

где h- сигнал, пропорциональный амплитуде отраженной гидроакустической волны на входе эхолота; ∂h - собственный шум эхолота.
Информационным признаком является время задержки принятого импульса относительного излученного:

где tЗАД - время задержки, tИЗЛ - время излучения гидроакустического сигнала; tПР - время приема отраженного гидроакустического сигнала.
Поскольку физически этот признак эхолотом не воспринимается, в состав системы включен блок 13 первичного преобразования гидроакустической информации. Назначением блока 13 является преобразование сигналов, пропорциональных амплитудам отраженной гидроакустической волны в сигнал, пропорциональный времени задержки между излученным и принятым гидроакустическим сигналами.
В запоминающем устройстве 15 микропроцессора 14 радиобуя производится накопление и осреднение данных о глубине в месте нахождения радиобуя. Эти данные хранятся в памяти микропроцессора 14 до момента передачи на борт БЛА.
Схема синхронизации 16 представляет кварцевый генератор тактовой частоты ƒTAKT.
Аппаратура, образующая канал приема-передачи представляет обычный телеметрический приемо-передатчик 5 УКВ-диапазона.
После излучения сигнала запроса с радиобуя 3i поступает ответный сигнал на борт БЛА, поступающий в приемопередающий блок 5, При этом информацию несет не только структура сигнала (информация о глубине в точке нахождения радиобуя), но и время задержки сигнала при приеме, характеризующее дальность до каждого из радиобуев 3i. Этот параметр однозначно определяет место положения БЛА относительно радиобуев. Определение положения БЛА относительно радиобуев является задачей блока 6 первичной обработки информации. При этом достаточно информации о дальности до двух радиобуев (высота полета БЛА известна). Следовательно, информация о взаимном расположении радиобуев и БЛА обладает значительной избыточностью, что позволяет повысить точность и надежность измерения дальности.
На выходе радиобуя будет присутствовать навигационный сигнал от радиобуя, содержащий значения Zi(tЗАД) и информацию о дальностях до буев Di. Здесь i - номер буя, Zi(tЗАД) - сигнал, пропорциональный высоте рельефа дна в месте нахождения буя, определяемый гидроакустическим датчиком радиобуя.
После запоминания сигналов в запоминающем устройстве 7 от всех буев эти данные передаются в бортовую систему 2 управления БЛА.
Первая часть вычислений посвящена вычислению координат радиобуев. Для этого производится сравнение измеренных гидроакустическими датчиками буев значений глубин (высот рельефа дна) с извлеченными из памяти ЗУ 8 эталонными для данного района коррекции по корреляционному алгоритму. Для выполнения сравнения в бортовой системе 2 управления БЛА рассчитывается целевой функционал, отражающий корреляционную зависимость между и измеренными и эталонными сигналами. Экстремум функционала соответствует искомому навигационному решению. В отечественной литературе и практических разработках, вследствие этих особенностей обработки информации, такие системы получили название корреляционно-экстремальных навигационных систем (КЭНС). Функционал имеет вид:

где  - счисленные ИНС координаты БЛА в момент времени tj, (m,n)- индекс гипотезы поиска экстремума функционала (3), Δ - линейное расстояние между гипотезами,
- счисленные ИНС координаты БЛА в момент времени tj, (m,n)- индекс гипотезы поиска экстремума функционала (3), Δ - линейное расстояние между гипотезами,  - совокупность измерений глубин (высот рельефа дна) zi в местах расположения i-х буев, Нк (*,*) - эталонная карта высот рельефа дна.
- совокупность измерений глубин (высот рельефа дна) zi в местах расположения i-х буев, Нк (*,*) - эталонная карта высот рельефа дна.
В бортовой системе 2 управления вычисляются координаты i-го радиобуя с применением процедуры поиска минимума функционала (3):

После нахождения минимума функционала по правилу (4) центральный процессор вычисляет оценку координат i-го радиобуя:

Вторая часть вычислений в бортовой системе 2 управления отведена вычислению оценок координат БЛА с учетом полученных оценок координат радиобуев в соответствии с выражением (5). Для определения оценок координат БЛА достаточно двух уравнений, поскольку высота НБЛА полета БЛА известна из показаний бортового высотомера Окончательно решаемая система уравнений выглядит следующим образом:

Здесь  - оценки координат ЛА,
- оценки координат ЛА,  - координаты соответственно i-го и i+1-го буев, Дi, Дi+1 - дальности от ЛА до i-го и i+1-го буев.
- координаты соответственно i-го и i+1-го буев, Дi, Дi+1 - дальности от ЛА до i-го и i+1-го буев.
Третья часть вычислений связана с вычислением поправок к бортовой ИНС. После вычисления оценок координат ЛА  в процессоре 4 осуществляется их сравнение со значениями XИНС,YИНС, полученными от инерциальной навигационной системы БЛА и производится вычисление поправок к показаниям ИНС:
в процессоре 4 осуществляется их сравнение со значениями XИНС,YИНС, полученными от инерциальной навигационной системы БЛА и производится вычисление поправок к показаниям ИНС:

Вычисленные поправки (7) передаются в вычислитель ИНС.На этом процесс коррекции заканчивается.
Устройство не имеет ограничений осуществления полетов по времени суток, сезонности, метеоусловиям и географии акваторий Мирового океана, над которыми проложены траектории маршрутов пилотируемых или БЛА по применению.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ навигационного оборудования морского района | 2022 |
|
RU2789999C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2340916C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2439614C2 |
| СПАСАТЕЛЬНЫЙ ЭКРАНОПЛАН | 2013 |
|
RU2546357C2 |
| Интегрированный комплекс бортового оборудования беспилотного летательного аппарата | 2023 |
|
RU2809930C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2434246C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОПРАВОК К ГЛУБИНАМ, ИЗМЕРЕННЫМ ОДНОЛУЧЕВЫМ ЭХОЛОТОМ ПРИ СЪЕМКЕ РЕЛЬЕФА ДНА АКВАТОРИИ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2615639C1 |
| Морское патрульное судно для экологического контроля территориальных вод, континентального шельфа и исключительной экономической зоны | 2015 |
|
RU2610156C1 |
Изобретение относится к области авиационного приборостроения и может быть использовано для повышения точности решения задач навигации, а именно определения координат в перспективных навигационных системах беспилотных летательных аппаратов (БЛА). Технический результат – расширение функциональных возможностей. Для этого в навигационный комплекс летательного аппарата с автономной коррекцией координат БЛА, содержащий инерциальную навигационную систему (ИНС), бортовую систему управления, включающую блок оценки координат БЛА и блок вычисления поправок к ИНС, радионавигационный канал, включающий приемопередающий блок, введены распределенные в пространстве радиобуи по требуемой акватории морской или водной поверхности, запоминающее устройство (ЗУ) карты рельефа дна, связанное через блок вычисления координат радиобуев с блоком оценки координат БЛА. Радиобуи выполнены в виде системы из гидроакустических датчиков, соединенных с блоком преобразования амплитуды гидроакустической волны в сигнал времени задержки, микропроцессоров, включающих запоминающее устройство и систему синхронизации, причем блок вычисления координат радиобуев представляет собой распределенную рельефометрическую корреляционно-экстремальную навигационную систему (КЭНС). В результате обеспечивается расширение функциональных возможностей на основе формирования «асимметричной» морской силы, основанной на заблаговременном размещении в ключевых районах акватории Мирового океана необходимого количества средств круглосуточной воздушной разведки и целеуказания с их оперативным задействованием по радиосигналу либо программно. 2 ил.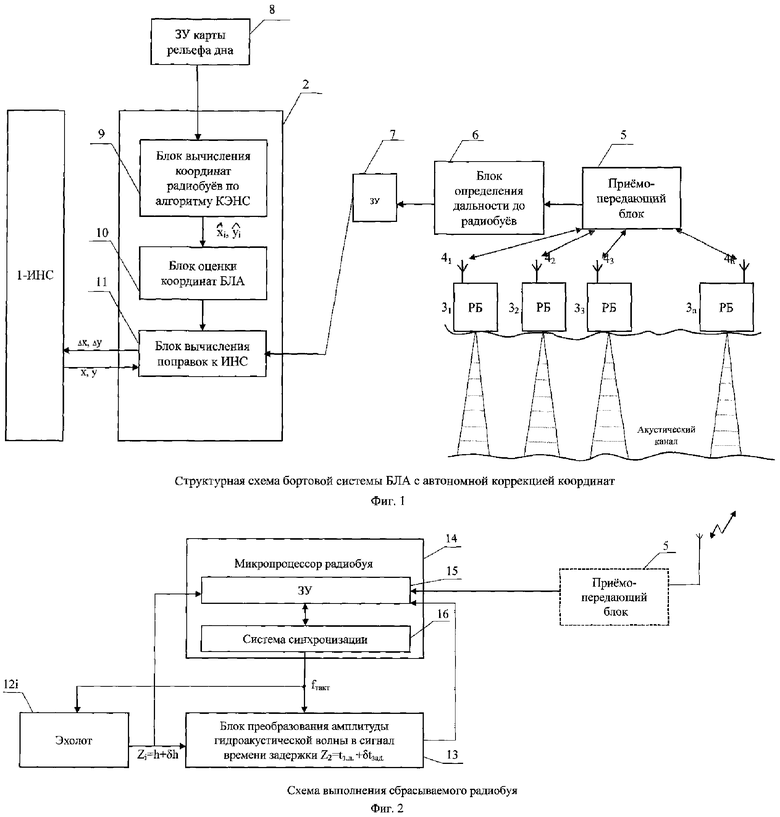
Бортовая система беспилотного летательного аппарата (БЛА) с автономной коррекцией координат, содержащая инерциальную навигационную систему, соединенную входами-выходами с процессором, радиомаяки, через антенны связанные с приемопередающим блоком, соединенным с блоком определения дальности до радиомаяков, выход которого соединен с входом запоминающего устройства, выход последнего соединен с блоком вычисления поправок к ИНС, бортовую систему управления, включающую блок вычисления поправок к инерциальной навигационной системе, блок оценки координат радиомаяков, при этом блок вычисления координат радиомаяков соединен через блок оценки координат БЛА и блок вычисления поправок к ИНС к вычислителю ИНС, отличающаяся тем, что введено запоминающее устройство карты рельефа дна морской поверхности, радиомаяки выполнены в виде радиобуев, распределенных на морской поверхности, каждый из которых содержит гидроакустический датчик, блок преобразования амплитуды гидроакустической волны в сигнал времени задержки, микропроцессор с запоминающим устройством и системой синхронизации, при этом гидроакустический датчик соединен с первым входом блока преобразования амплитуды гидроакустической волны в сигнал времени задержки, а выходом соединен с первым входом запоминающего устройства микропроцессора, выход блока преобразования амплитуды гидроакустической волны в сигнал времени задержки соединен с вторым входом запоминающего устройства микропроцессора, выход приемопередающего блока подключен к третьему входу запоминающего устройства микропроцессора, выход которого соединен через систему синхронизации с входом гидроакустического датчика и вторым входом блока преобразования амплитуды гидроакустической волны в сигнал времени задержки, причем блок вычисления координат радиобуев выполнен в виде рельефометрической корреляционно-экстремальной навигационной системы.
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ И КОРРЕКЦИИ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА | 1986 |
|
SU1840219A1 |
| СПОСОБ ОБНАРУЖЕНИЯ МОРСКИХ ЦЕЛЕЙ | 2013 |
|
RU2554640C2 |
| Белоглазов И.Н., Джанджгава Г.И., Чигин Г.П | |||
| Основы навигации по геофизическим полям | |||
| - М.: Наука, 1985 | |||
| С | |||
| Прибор для промывания газов | 1922 |
|
SU20A1 |
| УСТРОЙСТВО АВТОНОМНОЙ КОРРЕКЦИИ | 1999 |
|
RU2161296C1 |
| Инерциальный навигационный комплекс для высокоскоростного маневренного объекта | 2016 |
|
RU2657293C1 |

