ОБЛАСТЬ ТЕХНИКИ
Заявленное изобретение относится к лабораторным исследованиям, обработка данных в которых, основана на глубоком обучении, а именно к способу изменения уровня и объема жидкости в прозрачных контейнерах.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Традиционно лаборатории в значительной степени полагались на визуальные оценки, выполняемые человеком, для измерения конфиденциальных данных, касающихся уровней и объемов жидкости в колбах или резервуарах. Однако нынешний классический метод считается трудоемким, подвержен изменениям в зависимости от состояния здоровья человека и подвержен ошибкам, которые могут привести к сбоям в процессе разработки продукта. Эта ситуация подчеркивает необходимость в более надежной и быстрой системе, которая использует технологию компьютерного зрения для точного измерения уровня жидкости внутри устройств хранения и автоматического расчета необходимого объема на основе параметров геометрии хранилища.
Из уровня техники известны способы измерения уровня жидкости, например известен многоэлементный интегрированный способ интеллектуальной идентификации водного объекта (см. CN109859183, опубл. 07.06.2019)(1), основанный на расчете границ и экологической станции. Способ включает в себя этапы получения по меньшей мере одной части информации о прозрачности первого водного объекта и по меньшей мере одной части первой информации об уровне воды, собранной сенсорным узлом обнаружения водного объекта целевой водной зоны в настоящее время; ввод изображения целевой акватории, погруженного с помощью диска Шмидта, в заранее заданную сеть глубокого обучения SSD и на основе результата распознавания изображения диска Шмидта, выдаваемого сетью глубокого обучения SSD, получение текущей второй информации о прозрачности воды целевой акватории посредством применение метода расчета ребра; и определение текущей оптимальной информации о прозрачности воды целевой акватории на основе второй информации о прозрачности воды и по меньшей мере одной части первой информации о прозрачности воды. Стабильность и надежность процесса мониторинга качества воды могут быть улучшены, точность результатов мониторинга качества воды может быть эффективно улучшена, а затем эффективно улучшена точность измерения уровня воды и прозрачность воды в целевой акватории.
Способ, указанный в аналоге (1), не подходит для точного измерения уровня жидкости в лабораторных условиях.
Известно устройство обработки информации (см. EP4219023, опубл.02.08.2023)(2), которое включает в себя: датчик событий, включающий в себя пиксель, выполненный с возможностью фотоэлектрического преобразования оптического сигнала и вывода сигнала пикселя, при этом датчик событий выполнен с возможностью вывода временного изменения яркости оптического сигнала в качестве сигнала события на основе пикселя. сигнал; и процессор, выполненный с возможностью обнаружения капли, впрыскиваемой из дозатора, на основе сигнала события.
Устройство (2) может быть использовано для измерения объема жидкости, но не подходит для измерения уровня жидкости.
Из уровня техники известен способ и устройство бесконтактного измерения уровня воды, основанные на глубоком обучении и соответствующей среде (см.CN115331001, опубл. 11.11.2022) (3) и этот способ включает этапы: получение изображения водомера и обнаружение изображения водомера с помощью алгоритма определения положения для получения местоположения. результат обнаружения; получение изображения области интереса в соответствии с результатом определения положения; обнаружение изображения интересующей области с использованием алгоритма обнаружения текста для получения результата обнаружения масштаба и результата цифрового обнаружения; вычисление среднего значения масштаба в соответствии с результатом определения масштаба и вычисление в соответствии со средним значением масштаба для получения соответствующего пропорционального отношения между реальной высотой мира и системой координат изображения; в соответствии с результатом цифрового обнаружения вычисляются показания множества текстов показаний водомера и записываются минимальные показания; и вычисление первого уровня воды согласно минимальному показанию и результату определения положения нижнего конца водомера.
Способ и устройство (3) не может быть использовано для измерения объема жидкости.
Также из уровня техники известны, выбранные заявителем в качестве ближайшего аналога способ и система измерения количества авиационного топлива, основанные на искусственном интеллекте (см.CN111968171, опубл.20.11.2020) (4). Способ включает в себя следующие этапы: заранее получают несколько изображений в топливном баке и данные о количестве топлива, соответствующие изображениям при съемке изображений в топливном баке; предобработка фотографии; получение априорной зависимости между высотой уровня масла и количеством масла в масляном баке; получение кривой зависимости H-V высоты уровня масла и количества масла, соответствующей изображению; На основе этих этапов измерение количества масла осуществляется любым из следующих способов: способ 1: полученная кривая может использоваться для выполнения интерполяционного поиска кривой на новом изображении для получения количества масла в масляном баке; способ 2 включает следующие этапы: сбор десятков тысяч фотографий поверхности нефти и соответствующих фотоданных о количестве нефти в качестве обучающих выборок модели глубокого обучения; способ поиска изображения реализуется посредством семантической сегментации изображения DCNN и кодирования хэш-функции на основе глубокой сверточной нейронной сети и ее технологии сравнения хэш-кодов для получения данных измерения количества нефти.
Указанный в ближайшем аналоге способ (4) имеет низкую точность поскольку не устраняется погрешность, вызванной искажением перспективы.
КРАТКОЕ ИЗЛОЖЕНИЕ ИЗОБРЕТЕНИЯ
Техническим результатом изобретения является решение проблемы ручного и условно точного (т. е. теряющего точность при слабом освещении и естественных фоновых условиях) измерения уровня жидкости на основе чистого зрения в лаборатория и как следствие создание быстрой и точной автоматизированной системы, которая использует технологию глубокого обучения.
Технический результат достигается посредством способа изменения уровня и объема жидкости в прозрачных контейнерах, включающего использование градуированного цилиндра в качестве контейнера для жидкости и камеры со штативом.
Заявленный способ характеризуется тем, что калибруют камеру, создают набор данных. с более чем 214 изображениями, которые разделены на набор данных на обучение (70%), проверку (20%) и тестирование (10%), каждое из которых содержит градуированный цилиндр, наполненный прозрачной жидкостью на случайных уровнях, на некоторых изображениях градуированный цилиндр остается пустым без жидкости, каждое изображение аннотировано тремя классами с использованием инструмента аннотаций:
i Градуированный цилиндр;
ii Поверхность уровня жидкости;
iii Высота уровня жидкости;
далее обучают большую модель сегментации на графическом процессоре в течение 100 эпох и вводят размер изображений 640x640, для устранения погрешности, вызванной искажением перспективы получают информацию о глубине контейнера с жидкостью, вычисляют угол, под которым камера находится к контейнеру с жидкостью и используют этот угол для исправления искажения перспективы.
В предпочтительном варианте выполнения вычисляют соотношение пикселей к мм, используя информацию, полученную от модели глубокого обучения об измеренной высоте контейнера в пикселях (высота пикселя) и фактической высоте контейнер (высота мм), вычисляют угол камеры (θ) к поверхности жидкости, используя меньший и больший диаметры поверхности жидкости, вычисляют фактическую высоту жидкости в мм, используя измеренную высоту жидкости (пиксель высоты жидкости), меньший диаметр поверхности жидкости (отношение пикселей к мм) и угол (θ), используя фактическое значение высота жидкости (высота жидкости в мм) и внутренний диаметр (d) контейнера для расчета объема жидкости (V) в миллилитрах внутри контейнера.
КРАТКОЕ ОПИСАНИЕ РИСУНКОВ
Сущность изобретения поясняется рисунками, на которых:
Фиг.1 - Аннотированные классы: а) Градуированный цилиндр оранжевого цвета. б) Поверхность жидкости выделена зеленым цветом и в) Высота жидкости выделена красным;
Фиг.2 - Матрица погрешности;
Фиг.3 - Экспериментальная установка: камера и мерный цилиндр с жидкостью;
Фиг.4 - (Сверху вниз) Точность системы для: а) цветного образца, б) прозрачного образца;
Фиг.5 - (Сверху вниз) Точность системы для: а) цветного образца, б) прозрачного образца
Фиг.6 - (Сверху вниз) Стандартное отклонение а) цветного образца, б) прозрачного образца.
Эти чертежи не охватывают и, кроме того, не ограничивают весь объем вариантов реализации данного технического решения, а представляют собой только иллюстративный материал частного случая его реализации.
ВАРИАНТ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Заявленный способ изменения уровня и объема жидкости в прозрачных контейнерах использует возможность автоматического обнаружения и измерения уровня и объема жидкости в прозрачных контейнерах (т. е. пробирках в лаборатории) в режиме реального времени и является важной частью всей системы восприятия автономного роботы системы, используя современные технологии компьютерного зрения и глубокого обучения.
Заявленный способ изменения уровня и объема жидкости в прозрачных контейнерах использует современную модель глубокого обучения (SOTA) в сочетании с нашим новым алгоритмом с камерой RealSense D435 для предоставления точных данных измерений, тем самым ускоряя процесс разработки и улучшая контроль качества. Кроме того, система спроектирована так, чтобы быть совместимой с робототехническими манипуляторами, что открывает потенциал для дальнейшего развития и применения в этой области.
Предлагаемый подход включает в себя использование современной модели глубокого обучения (SOTA) YOLOv8 (You Only Look Once version 8) в сочетании с алгоритмом для обнаружения и измерения уровня и объема жидкости в прозрачных контейнерах.
А. Модель глубокого обучения
Решить проблему ручного и условно точного (т. е. теряющего точность при слабом освещении и естественных фоновых условиях) измерения уровня жидкости на основе чистого зрения в лабораториях. Предлагается быстрая и точная автоматизированная система, которая использует технологию глубокого обучения SOTA YOLOv8 для обеспечения точного и в реальном времени обнаружения контейнера с жидкостью, уровня жидкости и поверхности уровня жидкости.
Чтобы продемонстрировать наш подход, используем градуированный цилиндр в качестве контейнера для жидкости и камеру Realsense D435 со штативом, как показано на рис. 1. Калибруем камеру, используя гибкий метод калибровки, а затем создаем собственный набор данных. с более чем 214 изображениями, в которых мы делим наш набор данных на обучение (70%), проверку (20%) и тестирование (10%), т.е. 149, 42 и 23 соответственно. Каждое из этих изображений имеет размер 640 x 640 пикселей, и каждое из них содержит градуированный цилиндр, наполненный прозрачной жидкостью (водой) на случайных уровнях, а на некоторых изображениях градуированный цилиндр остается пустым без жидкости, чтобы обучить нашу модель. о пустом контейнере для жидкости. Кроме того, каждое из этих изображений аннотировано тремя классами с использованием инструмента аннотаций, как показано на рис. 1.
• Градуированный цилиндр (Тип контейнера)
• Liquid-Surface (Поверхность уровня жидкости)
• Liquid-Height (Высота уровня жидкости).
После этого обучаем большую модель сегментации YOLOv8 на графическом процессоре NVIDIA Tesla T4 в течение 100 эпох и вводим размер изображений 640x640. Результаты обучения, проверки и матрицы ошибок для нескольких метрик показаны на рисунке 2, где mAP50, mAP50-95 обозначают среднее значение средней точности с различным пересечением порогов объединения.
Одной из основных проблем при определении уровня поверхности является перспективное искажение изображения, которое приводит к значительной ошибке при измерении высоты уровня жидкости. Эту ошибку, вызванную искажением перспективы, можно решить несколькими способами. Один из способов - получить информацию о глубине контейнера с жидкостью, вычислить угол, под которым камера находится к контейнеру с жидкостью, и использовать этот угол для исправления искажения перспективы, и проблема решена, но загвоздка в том, что камера находит получить точную информацию о глубине сложно из-за прозрачности жидкости и контейнера. Вот почему мы разработали алгоритм, позволяющий устранить эту ошибку и точно оценить высоту уровня жидкости в прозрачных контейнерах без использования какой-либо информации о глубине с камеры.
Как показано в алгоритме 1, мы сначала вычисляем соотношение пикселей на мм (отношение пикселей к мм), используя информацию, которую мы получили от модели глубокого обучения об измеренной высоте контейнера в пикселях (высота пикселя) и фактической высоте контейнер (высота мм). Затем мы вычисляем угол камеры (θ) к поверхности жидкости, используя меньший и больший диаметры поверхности жидкости (т. е. minor_d и major_d соответственно), как показано в алгоритме 2. В алгоритме 3 мы вычисляем фактическую высоту жидкости в мм, используя измеренную высоту жидкости (пиксель высоты жидкости), меньший диаметр (minor_d) поверхности жидкости (отношение пикселей в мм) и угол (θ), который мы получили из алгоритма 1 и 2. Наконец, в алгоритме 4 мы используем фактическое значение высота жидкости (высота жидкости в мм) и внутренний диаметр (d) контейнера для расчета объема жидкости (V) в миллилитрах внутри контейнера. Алгоритмы проиллюстрированы в псевдоформе следующим образом.
Алгоритм 1: рассчитывает соотношение пикселей на мм высоты

Алгоритм 2: вычисляет угол наклона камеры к поверхности жидкости

Алгоритм 3: рассчитывает высоту жидкости в мм
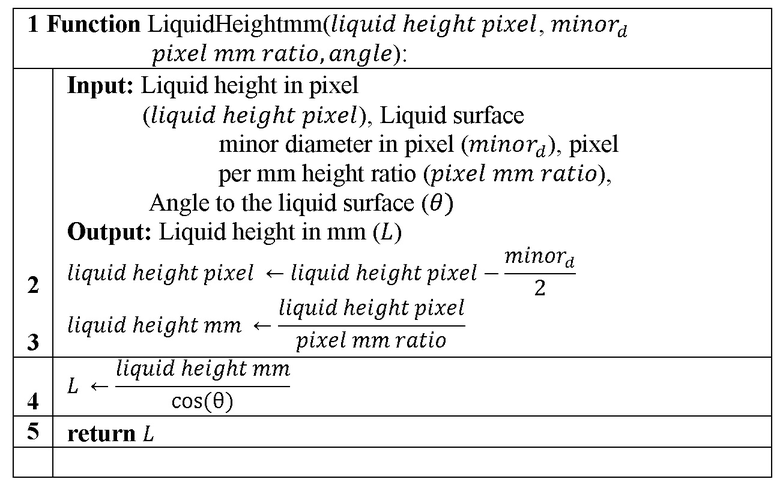
Алгоритм 4: Рассчитывает объем жидкости в мл

Был разработан также эксперимент для оценки эффективности предлагаемого подхода к измерению уровня жидкости. Эксперимент проводился в контролируемых условиях, при правильном освещении, откалиброванной камере, что позволило исключить любые минимальные внешние и внутренние факторы, которые могли повлиять на результаты.
Экспериментальная установка включала систему измерения уровня жидкости, как показано на рис. 3. Перед началом эксперимента камера Realsense D435 была откалибрована. В качестве прозрачного контейнера для этого эксперимента был выбран градуированный цилиндр. Эксперимент заключался в измерении уровня жидкости с шагом 10 мл для двух цветов жидкости (т.е. прозрачной и коричневой). Для каждого шага провели пять независимых измерений. Это было сделано для того, чтобы обеспечить надежность измерений за счет уменьшения влияния любой отдельной ошибки измерения, а также для последующего расчета точности нашего подхода путем определения стандартного отклонения.
Точность и точность нашего подхода были определены в контролируемом эксперименте, включающем измерение уровней и объемов жидкости двух разных цветов (прозрачной и коричневой). Высокая точность, достигнутая в этих экспериментах (98,57 % для прозрачной жидкости и 98,12 % для коричневой жидкости), подтверждает эффективность нашего подхода и его потенциал для реальных приложений.
Точность и точность системы:
В эксперименте по измерению точности (A) нашего подхода мы рассчитали среднее значение (μ) пяти показаний для каждого шага и сравнили его с истинным уровнем жидкости, а затем вычислили точность в процентах, как в (1). Средняя точность измерения прозрачной жидкости составила 98,57%, тогда как для коричневой жидкости она составила 98,12%.
A=100- (|μ_i-True Value|/(True Value))×100% (1).
Затем вычисляем точность, измеряя стандартное отклонение (σ) для пяти показаний на каждом этапе, как в (2). Мы вычисляем среднее отклонение, беря среднее значение пяти показаний и затем вычитая его при каждом измеренном показании. Затем дисперсию можно вычислить по сумме квадратов каждого среднего отклонения, а затем разделить на (n-1) (n - количество показаний). Теперь мы извлекаем квадратный корень из дисперсии, чтобы получить стандартное отклонение наших измерений на каждом шаге в 10 мл.
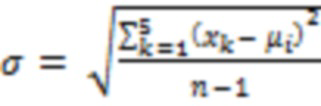 (2)
(2)
На рис. 4,5,6 можем заметить, как стандартные отклонения, по-видимому, различаются в областях малого объема по сравнению с областями большого объема в обоих типах жидкостей.
Производительность модели глубокого обучения оценивалась по времени, затраченному на три этапа:
• Предварительная обработка: это этап, на котором входные данные подготавливаются перед подачей в модель.
• Вывод: на этом этапе модель делает прогнозы на основе предварительно обработанных входных данных.
• Постобработка: это этап, на котором необработанные выходные данные модели обрабатываются для получения результатов.
Это включало время для создания прогноза. Аналогично, производительность алгоритма оценивалась по времени, которое потребовалось для выполнения измерения или чтения после получения прогноза от модели глубокого обучения. Оба этих времени измерялись в секундах для стандартизации. Позже это время было преобразовано в кадры в секунду (FPS), широко распространенный показатель в задачах компьютерного зрения, для оценки скорости алгоритма. Показаны в Таблице 1. Приведено среднее время предварительной обработки, вывода, постобработки модели и время работы алгоритма на изображение. Это дает нам 27,54 кадра в секунду, что является хорошим результатом для приложений реального времени.
Таблица 1 СРЕДНЯЯ СКОРОСТЬ МЕТОДА
(мс)
(мс)
(мс)
Таким образом, продемонстрирована устойчивость и надежность метода эмпирически, проведя эксперимент, включающий измерение уровней жидкости для двух разных цветов жидкости (прозрачной и коричневой). Результаты экспериментов показали, что предложенный метод имеет высокую точность 98,57 % для прозрачной жидкости и 98,12 % для коричневой жидкости со средней скоростью 27,54 кадров в секунду, что подтверждает эффективность нашего подхода и его потенциал для реальных приложений.
ПРОМЫШЛЕННОЕ ПРИМЕНЕНИЕ
Предложенный способ изменения уровня и объема жидкости в прозрачных контейнерах может применятся в разных отраслях промышленности, включая фармацевтику, производство и химическую обработку, особенно в лабораториях автоматизированного тестирования нефти и масел, где автономные системы требуют возможностей точного
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДИНАМИЧЕСКОГО УГЛА СМАЧИВАНИЯ В КАНАЛЕ | 2022 |
|
RU2794420C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДИНАМИЧЕСКОГО УГЛА СМАЧИВАНИЯ В КАНАЛЕ | 2021 |
|
RU2776634C1 |
| Способ обнаружения и классификации цветных изображений ядросодержащих клеток крови и костного мозга при формировании диагностического заключения в онкогематологии | 2024 |
|
RU2837299C1 |
| ОБУЧЕНИЕ GAN (ГЕНЕРАТИВНО-СОСТЯЗАТЕЛЬНЫХ СЕТЕЙ) СОЗДАНИЮ ПОПИКСЕЛЬНОЙ АННОТАЦИИ | 2019 |
|
RU2735148C1 |
| Способ управления бортовыми системами беспилотных транспортных средств при помощи нейронных сетей на основе архитектуры трансформеров | 2024 |
|
RU2841111C1 |
| СИСТЕМА И СПОСОБ ОБНАРУЖЕНИЯ ИЗНОСА И ПОТЕРИ КОРОНКИ ДЛЯ ЗЕМЛЯНЫХ РАБОТ | 2022 |
|
RU2825885C1 |
| Способ обучения нейронной модели глубокого обучения с одновременным использованием изображений и данных с облаков точек | 2023 |
|
RU2832583C1 |
| Способ обеспечения компьютерного зрения | 2022 |
|
RU2791587C1 |
| АНАЛИЗАТОР МОЛОКА ДЛЯ КЛАССИФИКАЦИИ МОЛОКА | 2019 |
|
RU2794708C2 |
| СЕГМЕНТАЦИЯ И ПРОГНОЗИРОВАНИЕ ВРЕМЕННЫХ ПАТТЕРНОВ ШЛЕЙФОВ НИЗКОГО УРОВНЯ | 2020 |
|
RU2783420C1 |


Заявляемое изобретение относится к лабораторным исследованиям, обработка данных в которых основана на глубоком обучении, а именно к способу изменения уровня и объема жидкости в прозрачных контейнерах. Cпособ изменения уровня и объема жидкости в прозрачных контейнерах включает использование градуированного цилиндра в качестве контейнера для жидкости и камеры со штативом, далее калибруют камеру, создают набор данных с более чем 214 изображениями, которые разделены на набор данных на обучение (70%), проверку (20%) и тестирование (10%), каждое из которых содержит градуированный цилиндр, наполненный прозрачной жидкостью на случайных уровнях, на некоторых изображениях градуированный цилиндр остается пустым без жидкости, каждое изображение аннотировано тремя классами с использованием инструмента аннотаций. Технический результат – обеспечение высокоточного и быстрого измерения уровня жидкости (и объема жидкости) с использованием технологии глубокого обучения. 6 ил.
Способ изменения уровня и объема жидкости в прозрачных контейнерах, включающий использование градуированного цилиндра в качестве контейнера для жидкости и камеры со штативом, отличающийся тем, что калибруют камеру, создают набор данных с более чем 214 изображениями, которые разделены на набор данных на обучение, а именно 70%, проверку, а именно 20%, и тестирование, а именно 10%, каждое из которых содержит градуированный цилиндр, наполненный прозрачной жидкостью на случайных уровнях, на некоторых изображениях градуированный цилиндр остается пустым без жидкости, каждое изображение аннотировано тремя классами с использованием инструмента аннотаций:
градуированный цилиндр;
поверхность уровня жидкости;
высота уровня жидкости;
далее обучают большую модель сегментации на графическом процессоре в течение 100 эпох и вводят размер изображений 640×640, для устранения погрешности, вызванной искажением перспективы, получают информацию о глубине контейнера с жидкостью, вычисляют угол, под которым камера находится к контейнеру с жидкостью, и используют этот угол для исправления искажения перспективы, далее вычисляют соотношение пикселей к мм, используя информацию, полученную от модели глубокого обучения об измеренной высоте контейнера в пикселях и фактической высоте контейнера, вычисляют угол камеры ( ) к поверхности жидкости, используя меньший и больший диаметры поверхности жидкости, вычисляют фактическую высоту жидкости в мм, используя измеренную высоту жидкости, меньший диаметр поверхности жидкости и угол (
) к поверхности жидкости, используя меньший и больший диаметры поверхности жидкости, вычисляют фактическую высоту жидкости в мм, используя измеренную высоту жидкости, меньший диаметр поверхности жидкости и угол ( ), используя фактическое значение высоты жидкости и внутренний диаметр (d) контейнера для расчета объема жидкости (V) в миллилитрах внутри контейнера.
), используя фактическое значение высоты жидкости и внутренний диаметр (d) контейнера для расчета объема жидкости (V) в миллилитрах внутри контейнера.
| СПОСОБ КОНТРОЛЯ ПАРАМЕТРОВ СЫПУЧИХ МАТЕРИАЛОВ В РЕЗЕРВУАРАХ | 2017 |
|
RU2661314C1 |
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЯ СЫПУЧИХ ИЛИ ЖИДКИХ МАТЕРИАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2279642C2 |
| WO 2021205146 A1, 14.10.2021 | |||
| WO 2022098945 A1, 12.05.2022 | |||
| CN 111968171 A, 20.11.2020. | |||

