Изобретения относится к устройствам для получения механической энергии, принцип работы которых основан на рекуперации энергии тел, совершающих колебательное движение, а именно к мехатронным пневматическим приводам с пружинным аккумулятором энергии [F03G 7/08].
Заявленное изобретение может быть применено в машиностроении, робототехнике и других отраслях промышленности, например, на автоматизированной производственной линии для выполнения операций, таких как погрузка и разгрузка, резка и т.д., где требуется возвратно-поступательное движение рабочего органа из одного крайнего положения в другое с фиксацией в крайнем положении хода.
Из уровня техники известен ЛИНЕЙНЫЙ ПРУЖИННЫЙ АККУМУЛЯТОР НА ОСНОВЕ ПРУЖИН СЖАТИЯ И РАСТЯЖЕНИЯ [RU 2819635 С1, опубликовано: 22.05.2024], содержащий коаксиально расположенные на одном штоке пружину сжатия и смонтированную внутри нее пружину растяжения, выполненные с противоположным направлением навивки и одинаковой жесткостью, при этом совпадающие концы пружин зафиксированы неподвижно относительно друг друга, на одном конце штока пружины смонтированы неподвижно с возможностью деформации пружин вдоль штока и передачи накопленной при их сжатии/растяжении потенциальной энергии на выходное звено аккумулятора с возможностью его возвратно-поступательного движения.
Недостатком аналога является его низкая надежность привода, обусловленная сложностью конструкции, а также возможность его применения без дополнительных передач только для реализации в качестве тянуще-толкающего механизма.
Наиболее близким по технической сущности является ПРУЖИННЫЙ ПРИВОД [Жавнер В., Мацко О. Пружинные приводы для возвратно-поступательных перемещений. Журнал «Проблемы машиностроения и надежности машин» 2016 г., №1, с. 3-7. Издательство: Российская академия наук (Москва), ISSN: 0235-7119], содержащий основание с направляющей, подвижную по направляющей каретку, смонтированную на выходном звене пневматического цилиндра с пружиной сжатия, расположенной в его штоковои полости, пневматический распределитель, датчик положения и систему управления. Основной технической проблемой прототипа является низкая надежность пружинного привода, обусловленная сложностью конструкции, в которой пружина сжатия смонтирована внутри штоковой области, что усложняет ремонт пневматического цилиндра из-за необходимости точного подбора заменяемой пружины по геометрическим размерам и рабочим параметрам и асимметричностью пружины, что может привести к повреждению штока и поршня пневматического цилиндра.
Кроме того, механизмы с такой схемой пружинного привода являются затратными по энергии. Кроме того, заявленная схема не позволяет обеспечить большие перемещения каретки из-за ограниченного штоковой полостью рабочего хода пружины.
Задача изобретения состоит в устранении недостатков аналогов.
Технический результат изобретения заключается в обеспечении возможности создания управляемого мехатронного пневматического привода с повышенным быстродействием и уменьшенными энергопотерями.
Указанный технический результат достигается за счет того, что управляемый мехатронный пневматический привод с пружинным аккумулятором, содержащий пневматический цилиндр, смонтированный на опорный оси с возможностью качения, подвижную вдоль направляющей каретку, смонтированную на выходном звене пневматического привода, пружинный аккумулятор, пневматический распределитель, датчик положения поршня пневматического привода, блок управления приводом, отличающийся тем, что снабжен фиксаторами крайних положений выходного звена пневматического привода, выполненных в виде электрических магнитов, а на выходном звене или каретке смонтированы взаимодействующие с фиксаторами магнитные элементы, пружинный аккумулятор выполнен в виде пары симметричных пружин растяжения, смонтированных между выходным звеном и корпусом снаружи пневматического цилиндра, при этом пружины для пружинного аккумулятора и пневматический цилиндр выбирают исходя из условия при котором должно соблюдаться;

где в(х)- коэффициент упругости пружины, F - усилия упругости пружины,  - сила трения в мехатронном пневматическом приводе, Fц(x) - сила тяги штока пневматического цилиндра.
- сила трения в мехатронном пневматическом приводе, Fц(x) - сила тяги штока пневматического цилиндра.
Краткое описание чертежей.
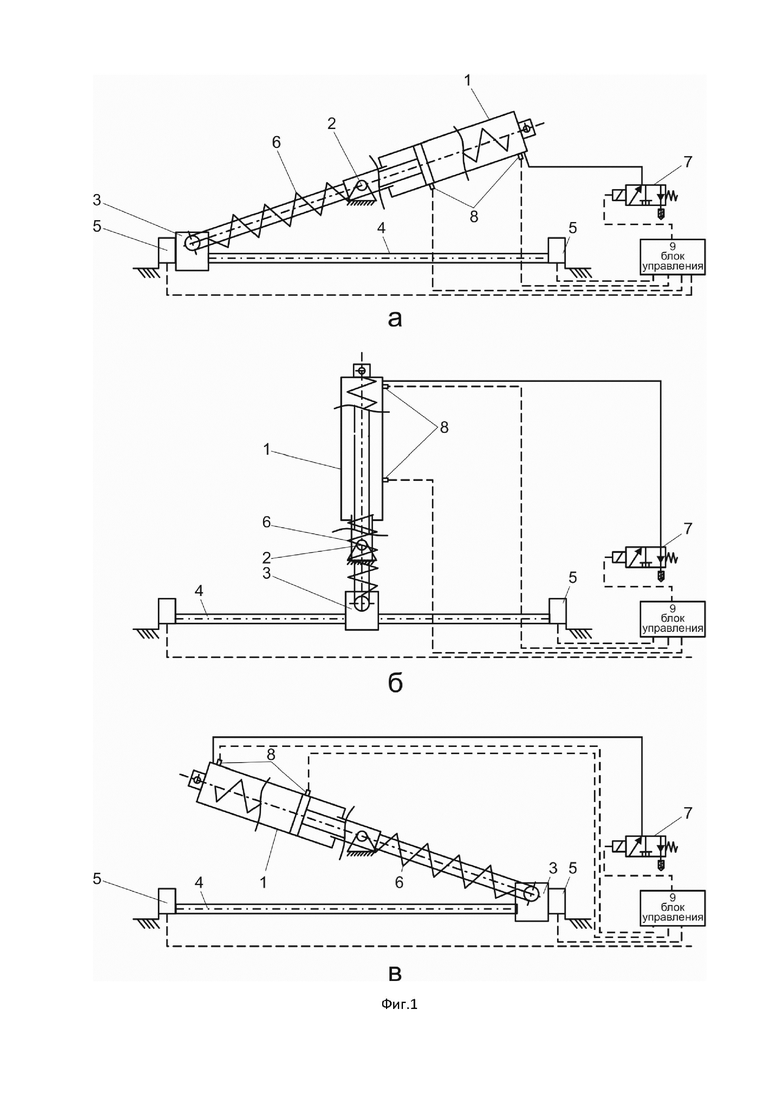
На фиг. 1 показана схема управляемого мехатронного пневматического привода с пружинным аккумулятором (а - в положении каретки слева, 6 - в положении каретки по центру, в - в положении каретки справа).
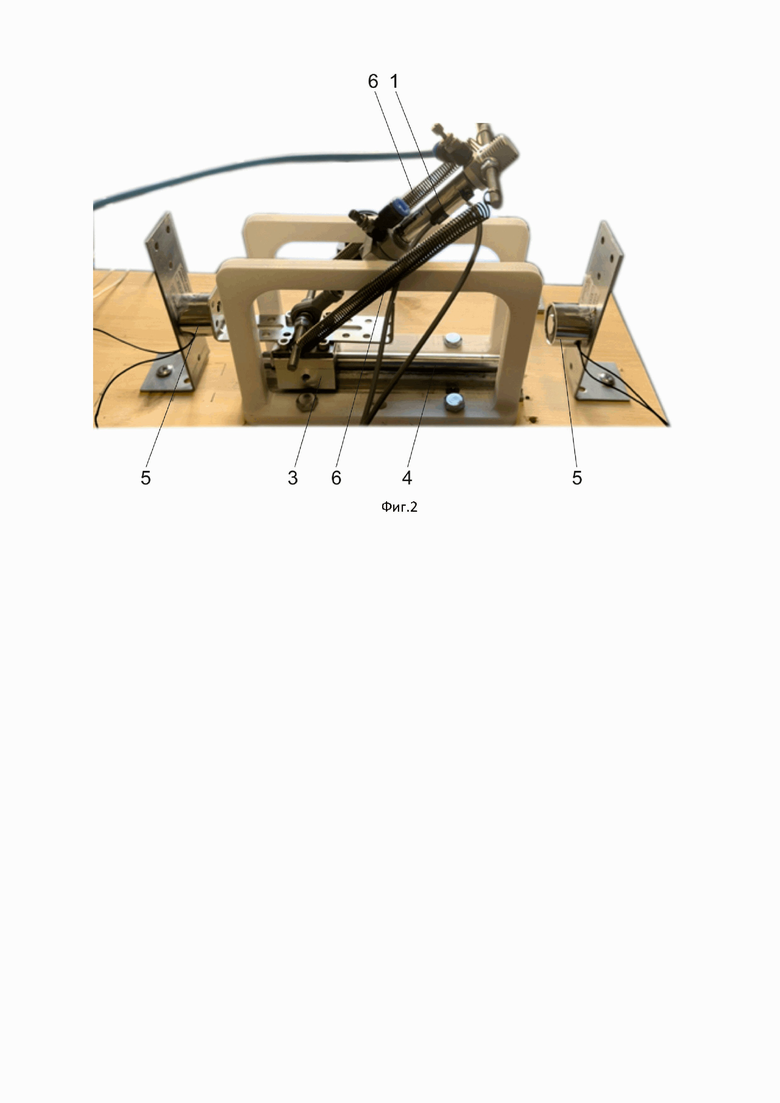
На фиг. 2 показан вариант реализации управляемого мехатронного пневматического привода с пружинным аккумулятором.
На фигурах обозначено: 1 - пневматический цилиндр, 2 - ось качения, 3 - каретка, 4 -направляющая, 5 - фиксаторы, 6 - пружины растяжения, 7 - пневмораспределитель, 8 - датчики положения, 9 - блок управления, 10 -
Осуществление изобретения.
Управляемый мехатронный пневматический привод с пружинным аккумулятором содержит пневматический цилиндр 1 (см.Фиг. 1) смонтированный своим корпусом на оси качения 2, выполненной опорной.
На дистальном конце выходного звена (штока) пневматического цилиндра 1 смонтирована каретка 3, выполненная с возможностью перемещения по неподвижной направляющей 4, смонтированной под пневматическим цилиндром 1. Сторцов направляющей 4 смонтированы фиксаторы 5 положения пневматического цилиндра 1. Фиксаторы 5 выполнены в виде электромагнитов.
Для обеспечения фиксации положения пневматического цилиндра 1 на дистальном конце его штока или на каретке 3, на сторонах, обращенных к фиксаторам 5 смонтированы ответные фиксаторам 5 элементы из магнитного материала с возможностью взаимодействия их с фиксаторами 5 и удержания пневматического цилиндра 1 в одном из крайних положений. К дистальному концу штока пневматического цилиндра 1 с смонтирована пружина растяжения 6, второй конец которой смонтирован к корпусу пневматического цилиндра 1. Для исключения деформации штока используют пару пружин растяжения 6, симметрично смонтированных к дистальному концу штока и к корпусу пневматического цилиндра 1 с противоположных сторон. Пружины растяжения 6, по своей сути, представляют собой пружинный аккумулятор.
Пневматический привод 1 через пневмораспределитель 7 подключен к источнику сжатого воздуха (на фигурах не показан), который может быть выполнен в виде насоса, компрессора, баллона со сжатым воздухом и т.д.
Пневматический цилиндр 1 снабжен датчиками положения 8 с возможностью определения положения поршня пневматического цилиндра 1.
Фиксаторы 5, датчики положения 8 и пневмораспределитель 5 подключены к блоку управления 9, питание которого осуществляется от источника питания (на фигурах не показан). На начальном этапе, под действием силы упругости пружин растяжения 6 шток пневматического цилиндра 1 втянут, а каретка 3 на направляющей 4 находится в среднем положении.
Для подачи энергии в пружинный аккумулятор с помощью блока управления 9 управляя пневмораспределителем 7 открывают подачу сжатого газа в бесштоковую полость пневматического цилиндра 1. За счет перемещения штока пневматический цилиндр 1 начинает поворачиваться по оси качения 2, а его дистальный конец начинает перемещаться вдоль направляющей 4 за счет движения каретки 3 по этой направляющей при этом пружиннный аккумулятор начинает накапливать потенциальную энергию. Когда каретка 3 достигает, например, левого конца направляющей 4 (см.Фиг. 1а) датчик положения 8 фиксирует сигнал о положении поршня пневматического цилиндра 1 и передает упомянутый сигнал в блок управления 9, который управляя золотником пневмораспределителя 7 прекращает подачу сжатого воздуха в бесштоковую полость пневматического цилиндра 1. В этот момент бесштоковая и штоковая полости пневматического цилиндра 1 через пневмораспределитель 7 или клапаны сброса (на фигурах не показаны) соединяются с атмосферой. Одновременно блок управления 9 включает ближайший к дистальному концу штока пневматического цилиндра 1 фиксатор 5, который создает притяжение дистального конца штока пневматического цилиндра 1 и фиксирует отклоненный в крайнее свое положение пневматический цилиндр 1. Иными словами, фиксатор 5 создает усилие на выходное звено, преодолевая силу пружинного аккумулятора, что устраняет необходимость в дальнейшем приложении тяги со стороны пневматического цилиндра 1.
Для фиксации выходного звена в крайнем положении должно быть выполнено следующее условия:

где в(х)- коэффициент упругости пружины, F - усилия упругости пружины,  - сила трения в мехатронном пневматическом приводе, Fц(x) - сила тяги штока пневматического цилиндра. Далее с блока управления 9 отключают фиксатор 5, который фиксировал отклонение пневматического цилиндра 1. В момент отключения фиксатора 5 за счет перемещения (втягивания) штока с помощью пружин растяжения 6 за счет преобразования потенциальной энергии, накопленной в этих пружинах 6 в кинетическую энергию перемещения штока его дистальный конец начинает перемещаться в противоположную от предыдущего положения сторону вдоль направляющей 4 за счет движения каретки 3 по этой направляющей 4. В этот момент шток и соответственно пневматический цилиндр 1 по оси качения 3 перемещаются только под действием силы упругости пружин растяжения 6.
- сила трения в мехатронном пневматическом приводе, Fц(x) - сила тяги штока пневматического цилиндра. Далее с блока управления 9 отключают фиксатор 5, который фиксировал отклонение пневматического цилиндра 1. В момент отключения фиксатора 5 за счет перемещения (втягивания) штока с помощью пружин растяжения 6 за счет преобразования потенциальной энергии, накопленной в этих пружинах 6 в кинетическую энергию перемещения штока его дистальный конец начинает перемещаться в противоположную от предыдущего положения сторону вдоль направляющей 4 за счет движения каретки 3 по этой направляющей 4. В этот момент шток и соответственно пневматический цилиндр 1 по оси качения 3 перемещаются только под действием силы упругости пружин растяжения 6.
Этот процесс осуществим благодаря тому, что потенциальная энергия, накопленная в пружинах растяжения 6, преобразуется в кинетическую энергию выходного звена пневматического цилиндра 1.
После прохождения каретки 3 средней точки на направляющей 4 (см.Фиг. 1б) за счет инерциальных сил, отклоняющих пневматический цилиндр 1 относительно оси качения 10 в противоположную сторону, шток пневматического цилиндра 1 начинает свое перемещение наружу из пневматического цилиндра 1 и кинетическая энергия выходного звена пневматического цилиндра 1 преобразуется в потенциальную энергию пружин растяжения 6. В этот момент сигнал с датчика положения 8 поршня пневматического цилиндра 1 поступает на блок управления 9, который по этому сигналу включает с помощью пневмораспределителя 7 подачу сжатого воздуха в бесштоковую полость пневматического цилиндра 1 до тех пор, пока дистальный конец штока (каретки 3) не достигнет крайнего правого положения на направляющей 4.
В этот момент датчик положения 8 передает сигнал в блок управления 9, который по этому сигналу с помощью пневмораспределителя 7 вновь прекращает подачу сжатого воздуха в штоковую полость и соединяет штоковую и бесштоковую полости с атмосферой. При этом с блока управления 9 включают ближайший к дистальному концу штока пневматического цилиндра 1 фиксатор 5, который обеспечивает притяжение дистального конца штока пневматического цилиндра 1 (каретки 3) и фиксирует пневматический цилиндр 1 в этом положении (см.Фиг. 1в).
Цикл работы повторяется.
В заявленном устройстве пружинный аккумулятор выполняет роль компенсатора энергии, рассеиваемой в системе, например, на трение между выходным звеном и направляющей, трение между поршнем и стенками пневмоцилиндра и т д.
В 2024 году автором изобретения был изготовлен макет заявленного управляемого мехатронного пневматического привода с пружинным аккумулятором (см.Фиг. 2) для изготовления которого использованы: пневматический цилиндр 1 Pneumax 1280-1294 (mir), пружины растяжения 6 с=360 Н/м,
электромагниты LEQJNGSHIYILAIKE ELE Р-30/22 в качестве фиксаторов 5,
датчики положения 8 FESTO SME-8-K-LED-24
программируемый логический контроллер LS XBM-DR16S в качестве блока управления 9,
источник питания POWER SUPPLY S-100-24,
реле TONGUNG JQC-3FF-S-Z,
насос СИБРТЕХ BL1100/6 в качестве источника сжатого воздуха,
пневмораспределитель 7 Pneumax 488 5/2.
Изготовленный управляемый мехатронный пневматический привод с пружинным аккумулятором и электромагнитными фиксаторами по сравнению с аналогичным мехатронным пневматическим приводом без фиксаторов при одинаковых параметрах и внешних условиях, продемонстрировал улучшенное быстродействие, а также возможность управления временем задержкой выходного звена пневматического цилиндра в крайних положения. Кроме того, заявленный привод показал увеличенное быстродействие по сравнению с традиционными мехатронными пневматическими приводами без пружинного аккумулятора. Также в изготовленном мехатронном пневматическом приводе с пружинным аккумулятором и электромагнитным фиксатором наблюдалось снижение энергопотерь по сравнению с мехатронным пневматическом приводе без фиксатора. Таким образом, конструкция и принцип действия заявленного управляемого мехатронного пневматического привода с пружинным аккумулятором обеспечивает получение технического результата - обеспечении возможности создания управляемого мехатронного пневматического привода с повышенным быстродействием и уменьшенными энергспотерями.
Изобретение относится к устройствам для получения механической энергии, принцип работы которых основан на рекуперации энергии тел, совершающих колебательное движение, а именно к мехатронным пневматическим приводам с пружинным аккумулятором энергии. Технический результат - обеспечение возможности создания управляемого мехатронного пневматического привода с повышенным быстродействием и уменьшенными энергопотерями - достигается за счет того, что привод содержит пневматический цилиндр, смонтированный на опорный оси с возможностью качения, подвижную вдоль направляющей каретку, смонтированную на выходном звене пневматического привода, пружинный аккумулятор, пневматический распределитель, датчик положения поршня пневматического привода, блок управления приводом, при этом привод снабжен фиксаторами крайних положений выходного звена пневматического привода, выполненными в виде электрических магнитов, а на выходном звене или каретке смонтированы взаимодействующие с фиксаторами магнитные элементы, пружинный аккумулятор выполнен в виде пары симметричных пружин растяжения, смонтированных между выходным звеном и корпусом снаружи пневматического цилиндра, при этом пружины для пружинного аккумулятора и пневматический цилиндр выбирают исходя из условия, при котором должно соблюдаться
 ,
,
где в(х) - коэффициент упругости пружины, F - усилия упругости пружины,  - сила трения в мехатронном пневматическом приводе, Fц(x) - сила тяги штока пневматического цилиндра. 2 ил.
- сила трения в мехатронном пневматическом приводе, Fц(x) - сила тяги штока пневматического цилиндра. 2 ил.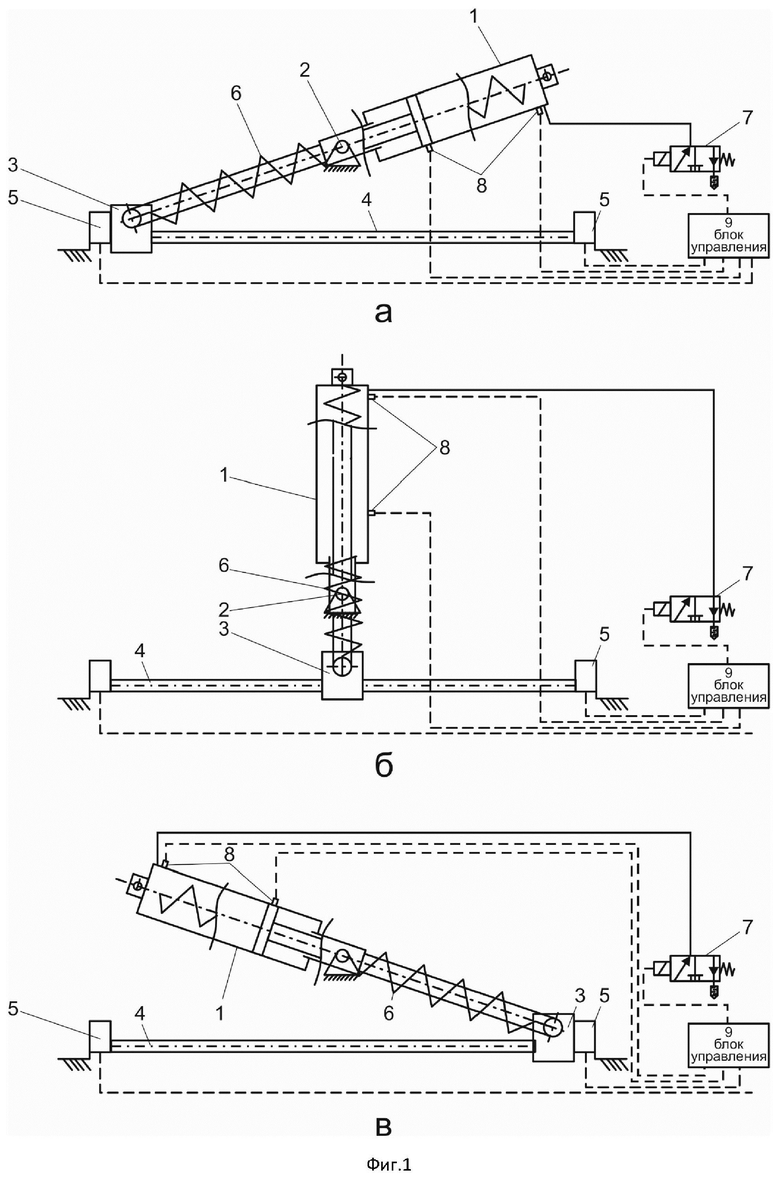
Управляемый мехатронный пневматический привод с пружинным аккумулятором, содержащий пневматический цилиндр, смонтированный на опорный оси с возможностью качения, подвижную вдоль направляющей каретку, смонтированную на выходном звене пневматического привода, пружинный аккумулятор, пневматический распределитель, датчик положения поршня пневматического привода, блок управления приводом, отличающийся тем, что снабжен фиксаторами крайних положений выходного звена пневматического привода, выполненными в виде электрических магнитов, а на выходном звене или каретке смонтированы взаимодействующие с фиксаторами магнитные элементы, пружинный аккумулятор выполнен в виде пары симметричных пружин растяжения, смонтированных между выходным звеном и корпусом снаружи пневматического цилиндра, при этом пружины для пружинного аккумулятора и пневматический цилиндр выбирают исходя из условия, при котором должно соблюдаться условие:
 ,
,
где в(х) - коэффициент упругости пружины, F - усилия упругости пружины,  - сила трения в мехатронном пневматическом приводе, Fц(x) - сила тяги штока пневматического цилиндра.
- сила трения в мехатронном пневматическом приводе, Fц(x) - сила тяги штока пневматического цилиндра.
| МЕХАТРОННЫЙ ПРУЖИННЫЙ ПРИВОД | 2020 |
|
RU2742446C1 |
| ЛИНЕЙНЫЙ ПРУЖИННЫЙ АККУМУЛЯТОР НА ОСНОВЕ ПРУЖИН СЖАТИЯ И РАСТЯЖЕНИЯ | 2023 |
|
RU2819635C1 |
| 0 |
|
SU158169A1 | |
| CN 118381249 A, 23.07.2024 | |||
| US 10724507 B2, 28.07.2020. | |||

