Изобретение относится к области робототехники и автоматизации и может быть использовано для преобразования электрической энергии в возвратно-поступательное циклическое движение, а именно к мехатронным электромагнитным приводам с гибкими элементами и пружинными аккумуляторам [F03G 7/08, F16H 33/20].
Из уровня техники известен ПРУЖИННЫЙ ПРИВОД [Жавнер В., Мацко О. Пружинные приводы для возвратно-поступательных перемещений. Журнал «Проблемы машиностроения и надежности машин» 2016 г., №1, с. 3-7. Издательство: Российская академия наук (Москва), ISSN: 0235-7119], содержащий основание, подвижную каретку, пневматический цилиндр с пружинной сжатия, расположенной в его штоковой полости, пневматический распределитель, датчик положения и систему управления.
Недостатком аналога является невозможность обеспечить большие перемещения каретки из-за ограниченного штоковой областью пневматического цилиндра рабочего хода пружины, а также низкая надежность пружинного привода, обусловленная асимметричностью пружины, что может привести к повреждению штока и поршня пневматического цилиндра.
Наиболее близким по технической сущности является РЕКУПЕРАТИВНЫЙ ПРИВОД [RU 158169 U1, опубл. 20.12.2015], содержащий корпус с закрепленной направляющей, на которую установлена каретка с возможностью возвратно-поступательного движения, аккумулятор механической энергии в виде пружины растяжения и блок управления, при этом каретка оснащена фиксатором, соединенным с блоком управления, и шарнирно соединена с одним концом пружины растяжения, а другой конец пружины растяжения соединен с корпусом, при этом на корпусе установлен двигатель, соединенный с блоком управления, отличающийся тем, что он снабжен датчиками положения каретки, расположенными на корпусе и соединенными с блоком управления, а между корпусом и пружиной установлено приводное звено, соединенное с двигателем.
Недостатком аналога является низкая надежность привода, обусловленная сложностью конструкции, низкая эффективность и функциональность привода, обусловленные малым ходом рабочего органа двигателя и необходимостью приложения значительных усилий к пружинному аккумулятору для приведения его в работу, обусловленные особенностью крепления рабочего органа двигателя к верхнему основанию пружинного аккумулятора. Кроме того, аналог обладает низкой надежностью, которая обусловлена тем, что пружина в аналоге вынуждена воспринимать на себя нагрузки, которая испытывает на себе каретка.
Задача изобретения состоит в устранении недостатков аналогов. Технический результат изобретения заключается в обеспечении возможности создания надежного, быстродействующего электромагнитного привода со сниженным энергопотреблением.
Указанный технический результат достигается за счет того, что способ получения возвратно-поступательного движения выходного звена электромагнитного привода, характеризующийся тем, что поступательное движение выходного звена по направляющей обеспечивают за счет силы притяжения электромагнитных фиксаторов, смонтированных у направляющей у крайних правого и левого положений выходного звена, а возвратное движение выходного звена по направляющей обеспечивают за счет потенциальной энергии пружины пружинного аккумулятора, смонтированной на выступающей из корпуса части магнитного сердечника между корпусом и опорой, смонтированной на конце магнитного сердечника, которую преобразуют в кинетическую энергию перемещения штока смонтированного в продолжение магнитного сердечника, дистальный конец которого соединен с выходным звеном гибким элементом, при этом потенциальную энергию пружинному аккумулятору сообщают от перемещения магнитного сердечника при воздействии на него магнитным полем катушки электромагнитного привода.
Указанный технический результат достигается за счет того, что мехатронный электромагнитный привод с пружинным аккумулятором, включающий линейный электромагнитный привод, содержащий подвижно смонтированный в корпусе магнитный сердечник, с возможностью продольного перемещения под действием магнитного поля, возникающего в катушке, смонтированной на корпусе привода, к одному из концов магнитного сердечника соосно смонтирован шток, выполненный выступающим за пределы корпуса привода, а противоположный штоку конец магнитного сердечника выполнен выступающим за торец корпуса для монтажа на нем соосно пружинного аккумулятора, выполненного в виде пружины сжатия, которая опирается своими торцами на корпус и на опору, смонтированную на торце выступающей части магнитного сердечника, с возможностью перемещения магнитного сердечника за счет потенциальной энергии, накопленной в пружинном аккумуляторе за счет деформации при движении магнитного сердечника под действием магнитного поля, возникающего в катушке, при этом для возвратного перемещения выходного звена за счет потенциальной энергии, накопленной в пружинном аккумуляторе, дистальный конец штока соединен с выходным звеном гибким элементом, проходящим через опорный блок с возможностью изменения направления перемещения гибкого элемента, у направляющей смонтированы электромагнитные фиксаторы выходного звена, выполненные с возможностью обеспечения поступательного движения выходного звена в крайнее правое и крайнее левое положения за счет силы притяжения электромагнитов фиксаторов, у направляющей с возможностью определения положения выходного звена и управления катушкой электромагнитного привода и фиксаторами с помощью блока управления, к которому подключены катушка, фиксаторы и датчики положения. В частности, пружина пружинного аккумулятора выполнены в виде пружины сжатия.
Краткое описание чертежей
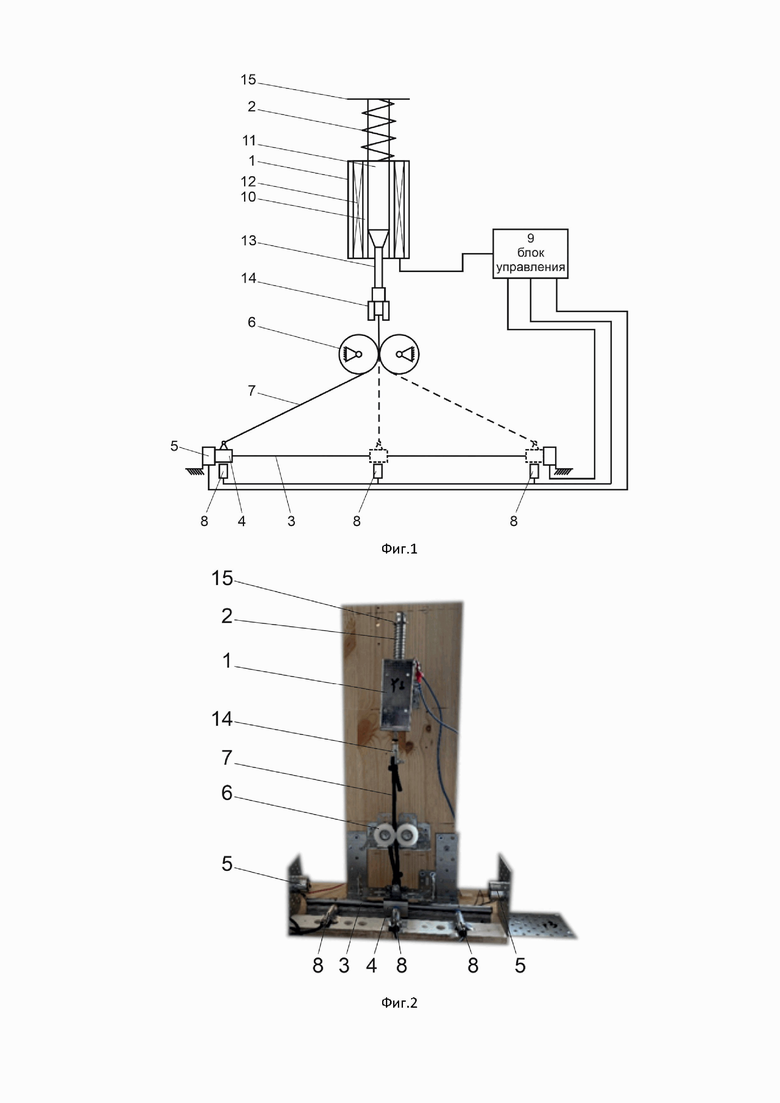
На фиг.1 показана схема мехатронного электромагнитного привода с пружинным аккумулятором. На фиг.2 показан вариант реализации мехатронного электромагнитного привода с пружинным аккумулятором энергии. На фигурах обозначено: 1 - линейный электромагнитный привод, 2 - пружинный аккумулятор, 3 - направляющая, 4 - выходное звено, 5 - фиксаторы, 6 - опорные блоки, 7 - гибкий элемент, 8 - датчики положения, 9 - блок управления, 10 - корпус, 11 - магнитный сердечник, 12 - катушка, 13 - шток, 14 - соединительное звено, 15 - опора.
Осуществление изобретения
Мехатронный электромагнитный привод с пружинным аккумулятором содержит линейный электромагнитный привод 1, пружинный аккумулятор 2, направляющую 3, выходное звено 4, фиксаторы 5 выходного звена 4, опорные блоки 6, гибкий элемент 7, датчики положения 8 выходного эвена 4 и блок управления 9 (см. Фиг.1). Линейный электромагнитный привод 1 выполнен в виде полого внутри цилиндрического корпуса 10, заглушенный с торцов фланцами (на фигурах не показаны). Внутри корпуса 10 смонтирован с возможностью продольного возвратно-поступательного движения магнитный сердечник 11, выполненный в виде стержня. Вокруг корпуса 9 снаружи смонтирована катушка 12.
К одному из концов магнитного сердечника 11 соосно смонтирован шток 13, выполненный выступающим за пределы корпуса 10 линейного электромагнитного привода 1.
Противоположный штоку конец магнитного сердечника 11 выполнен выступающим за торец корпуса 10. На упомянутую выступающую часть магнитного сердечника 11 соосно смонтирован пружинный аккумулятор 2, выполненный в виде пружины сжатия, которая опирается своими торцами на корпус 10 и на опору 15, смонтированную на торце выступающей части магнитного сердечника 11.
Корпус 10 смонтирован неподвижно на опорном основании, ортогонально по отношению к направляющей 3, смонтированной неподвижно со стороны штока 13.
На направляющей 3 подвижно смонтировано выходное звено 4 мехатронного электромагнитного привода, выполненное в виде каретки с возможностью ее перемещения по направляющей 3 как в одну сторону относительно оси перемещения штока 13, так и в другую.
Между электромагнитным приводом 1 со стороны дистального конца штока 13 и направляющей 3 по обе стороны от оси симметрии штока 13 смонтирована пара опорных блоков 6. Ось, проходящая через оси вращения опорных блоков 6, ориентирована преимущественно параллельно направляющей 3 и ортогонально оси перемещения штока 13.На дистальном конце штока 13 смонтировано соединительное звено 14, которое соединено с выходным звеном 4 гибким элементом 7, выполненным в виде, например, троса, проходящим между опорными блоками 6. Опорные блоки 6 выполнены с возможностью изменения направления перемещения гибкого элемента 7.
У соединительного звена 14 на штоке 13 может быть смонтирован демпфер (на фигурах не показан) с возможностью компенсации ударных нагрузок при ударе соединительного звена 14 с корпусом 10.
С торцов направляющей 3 или на направляющей 3 в зависимости от ее длины и длины хода штока 13 смонтированы фиксаторы 5 выходного эвена 4, обеспечивающие фиксацию выходного звена 4 в его крайнем левом или правом положении.
Фиксаторы 8 выполнены в виде электромагнитов.
Для обеспечения фиксации к фиксаторам 5 выходное звено 4 выполнено из магнитных материалов или на выходном звене 4 с торцов, обращенных к фиксаторам 5, смонтированы элементы из магнитных материалов с возможностью магнитного взаимодействия с фиксаторами 5 и удержания выходного звена 4 в одном из крайних положений.
У направляющей 3, по крайней мере, у крайних левого и правого и среднего положений выходного звена 4 смонтированы неконтактные датчики положения 8 выходного звена 4.Катушка возбуждения 12, фиксаторы 5 и датчики положения 8 электрически подключены к блоку управления 9.
Мехатронный электромагнитный привод с пружинным аккумулятором работает следующим образом. В исходном положении выходное звено 4 может быть расположено в одном из крайних (левом или правом) или среднем положении на направляющей 3. Предположим, что выходное звено 4 расположено на левом краю направляющей 2 и зафиксировано с помощью расположенного там же фиксатора 5. Гибкий элемент 7 в таком случае огибает опорный блок 6, расположенный слева от оси перемещения штока 13. Дистальный конец штока 13 находится в нижнем положении, пружина пружинного аккумулятора 2 находится в сжатом состоянии, обладая максимальной потенциальной энергией. Катушка 12 обесточена. С соответствующего датчика положения 8 в блок управления 9 подается сигнал о нахождении вблизи него выходного звена 4.
С блока управления 9 отключают подачу тока на электромагнит левого фиксатора 5. Выходное звено 4 освобождается от действия магнита фиксатора 5, а пружина пружинного аккумулятора 2 создает возвратное усилие, передаваемое через опору 15 на магнитный сердечник 11, который в свою очередь вместе со штоком 13 начинает движение вверх и за счет гибкого элемента 7 скользящего по левому опорному блоку 6 перемещает выходное звено 4 по направляющей 3 вправо. То есть потенциальная энергия пружинного аккумулятора 2 преобразуется в кинетическую энергию выходного звена 4.
При достижении выходного звена 4 среднего на направляющей 3 положения с соответствующего датчика положения 8, расположение которого у направляющей 3 соответствует среднему положению выходного звена 4, подается в блок управления 8 сигнал по которому с блока управления 9 включают одновременно правый фиксатор 5 и электромагнитный привод 1. Выходное звено 4 под действием силы притяжения левого фиксатора 5 перемещается по направляющей 3 в его крайнее левое положение, а шток 13 линейного электромагнитного привода 1 сжимает пружину пружинного аккумулятора 2 за счет магнитного поля, создаваемого катушкой 12. То есть кинетическая энергия штока 13 преобразуется в потенциальную энергию пружинного аккумулятора 2. Выходное звено 4 при этом при прохождении среднего положения на направляющей 3 продолжает свое движение по инерции. При достижении левого крайнего положения выходное звено 4 фиксируется в своем положении фиксатором 5.
Цикл перемещения выходного звена 4 из крайнего левое в крайнее правое положения и обратно повторяется.
Скорость перемещения выходного звена 4 в крайнее положение регулируют параметрами пружины пружинного аккумулятора 2 и/или скоростью перемещения магнитного сердечника 11. Если скорость перемещения магнитного сердечника 11 меньше скорости перемещения выходного звена 4, то в таком случае часть кинетической энергии выходного звена 4 расходуется на тяговое усилие, оказываемое выходным звеном 4 на магнитный сердечник 11 и скорость перемещения выходного звена 4 уменьшается. Скорость перемещения магнитного сердечника 11 регулируют изменением параметров катушки 12 или величиной тока или напряжения, подаваемого на катушку 12.
В заявленном мехатронном электромагнитном приводе пружинный аккумулятор выполняет роль компенсатора энергии, рассеиваемой в системе на трение между выходным звеном 4 и направляющей 3, магнитного сердечника 11 со стенкой корпуса 10 и снижает потребление энергии на перемещение выходного звена 4 если бы оно полностью приводилось бы в движение за счет перемещения магнитного сердечника 11.
Надежность мехатронного электромагнитного привода с пружинным аккумулятором энергии обеспечивается за счет выполнения линейного электромагнитного привода 1 в неподвижным, что в свою очередь снижает количество движущихся элементов и узлов, обеспечивающих их движение, при этом перемещение выходного звена 4 обеспечивается за счет энергии пружинного аккумулятора 2 и фиксаторов 5, управляемых блоков 9 управления 12 по сигналам от датчиков положения 8.Быстродействие привода обеспечивается за счет применения пружины сжатия пружинного аккумулятора 2, обеспечивающих движение выходного звена 4 с высокой скоростью и управления приводом с помощью блока управления 9, который обеспечивает синхронное управление фиксаторами 5 и катушкой 12 по сигналам от датчиков положения 8, при этом быстродействие заявленного привода регулируют параметрами пружины пружинного аккумулятора 2 и/или скоростью перемещения магнитного сердечника 11. Чем больше сжатие и коэффициент жесткости, тем большую кинетическую энергию можно передать выходному звену 4.
В 2024 году автором полезной модели был изготовлен макет заявленного электромагнитного привода с пружинным аккумулятором (см.Фиг.2).
Изготовленный мехатронный электромагнитный привод с пружинным аккумулятором по сравнению с аналогичным электромагнитным приводом без фиксаторов при одинаковых параметрах и внешних условиях продемонстрировал улучшенное (увеличенное) быстродействие, а также возможность управления временем задержки выходного звена 4 в крайних положениях, Кроме того, изготовленный привод показал улучшенное (увеличенное) быстродействие по сравнению с аналогичным приводом без пружинного аккумулятора 2, в котором перемещение магнитного сердечника 11 осуществляется исключительно электрическим током, например встречным электромагнитным приводом или второй катушкой. В изготовленном приводе наблюдается снижение энергопотерь на трение и электрической энергии на перемещение за счет пружинного аккумулятора 2.
Кроме того, преимуществами заявленного мехатронного электромагнитного привода как показало его практическое применение являются: простота конструкции и связанные с этим надежность и длительный срок службы; простота установки, эксплуатации и обслуживания, которые также связаны в том числе с простотой конструкции; высокое быстродействие, что делает заявленный мехатронный электромагнитный привод подходящим для механизмов с частыми запусками и остановками. Кроме того, заявленный мехатронный электромагнитный привод обладает высокой управляемостью и стабильностью тягового усилия путем регулирования тока, что делает его пригодным для автоматизированных систем управления. Фиксаторы 5 позволяют генерировать значительные механические усилия за короткое время. Применение пружинного аккумулятора 2 в конструкции мехатронного электромагнитного привода позволяет снизить токовую нагрузку на фиксаторы 5, уменьшить время их работы, что в свою очередь позволяет уменьшить их нагрев, повысить надежность и срок службы, снизить энергопотребление привода, влияние электромагнитных помех на окружающие электронные устройства за счет уменьшения времени работы катушки 11. Гибкий элемент 7 позволяет избежать ограничений по перемещению выходного звена 4 на длинные расстояния и одновременно снижает затрачиваемую энергию.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОЛУЧЕНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ВЫХОДНОГО ЗВЕНА ПНЕВМАТИЧЕСКОГО ПРИВОДА И МЕХАТРОННЫЙ ПНЕВМАТИЧЕСКИЙ ПРИВОД С ПРУЖИННЫМ АККУМУЛЯТОРОМ ЭНЕРГИИ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2024 |
|
RU2841444C1 |
| УПРАВЛЯЕМЫЙ МЕХАТРОННЫЙ ПНЕВМАТИЧЕСКИЙ ПРИВОД С ПРУЖИННЫМ АККУМУЛЯТОРОМ | 2024 |
|
RU2838735C1 |
| ЛИНЕЙНЫЙ ПРУЖИННЫЙ АККУМУЛЯТОР НА ОСНОВЕ ПРУЖИН СЖАТИЯ И РАСТЯЖЕНИЯ | 2023 |
|
RU2819635C1 |
| МЕХАТРОННЫЙ ПРУЖИННЫЙ ПРИВОД | 2020 |
|
RU2742446C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВНУТРЕННЕГО ТРЕНИЯ ПРУЖИННОГО АККУМУЛЯТОРА | 2023 |
|
RU2813756C1 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЯ ПРУЖИН НА ПРОЧНОСТЬ | 2022 |
|
RU2788307C1 |
| СПОСОБ И УСТРОЙСТВО КОМПЕНСАЦИИ ЭЛЕКТРОМАГНИТНЫХ ПОМЕХ ПРИ ИЗМЕРЕНИЯХ СИГНАЛА НЕРНСТА | 2024 |
|
RU2826799C1 |
| Электромагнитный привод | 1977 |
|
SU738005A1 |
| Электромагнитный привод для поршневого компрессора | 2013 |
|
RU2623010C2 |
| СПОСОБ И УСТРОЙСТВО ЗАХВАТА СИГНАЛА, ВОЗНИКАЮЩЕГО ПРИ ЭФФЕКТЕ НЕРНСТА-ЭТТИНГСГАУЗЕНА В СВЕРХПРОВОДНИКЕ | 2023 |
|
RU2806889C1 |
Изобретение относится к области робототехники и автоматизации и может быть использовано для преобразования электрической энергии в возвратно-поступательное циклическое движение. Технический результат - обеспечение возможности создания надежного, быстродействующего электромагнитного привода со сниженным энергопотреблением, достигается способом получения возвратно-поступательного движения выходного звена электромагнитного привода, в котором поступательное движение выходного звена по направляющей обеспечивают за счет силы притяжения электромагнитных фиксаторов, смонтированных у направляющей у крайних правого и левого положений выходного звена, а возвратное движение выходного звена по направляющей обеспечивают за счет потенциальной энергии пружины сжатия пружинного аккумулятора, смонтированной на выступающей из корпуса части магнитного сердечника между корпусом и опорой, смонтированной на конце магнитного сердечника, которую преобразуют в кинетическую энергию перемещения штока, смонтированного в продолжение магнитного сердечника, противоположный магнитному сердечнику конец которого соединен с выходным звеном гибким элементом, при этом потенциальную энергию пружинному аккумулятору сообщают от перемещения магнитного сердечника при воздействии на него магнитным полем катушки электромагнитного привода. 2 н.п. ф-лы, 2 ил.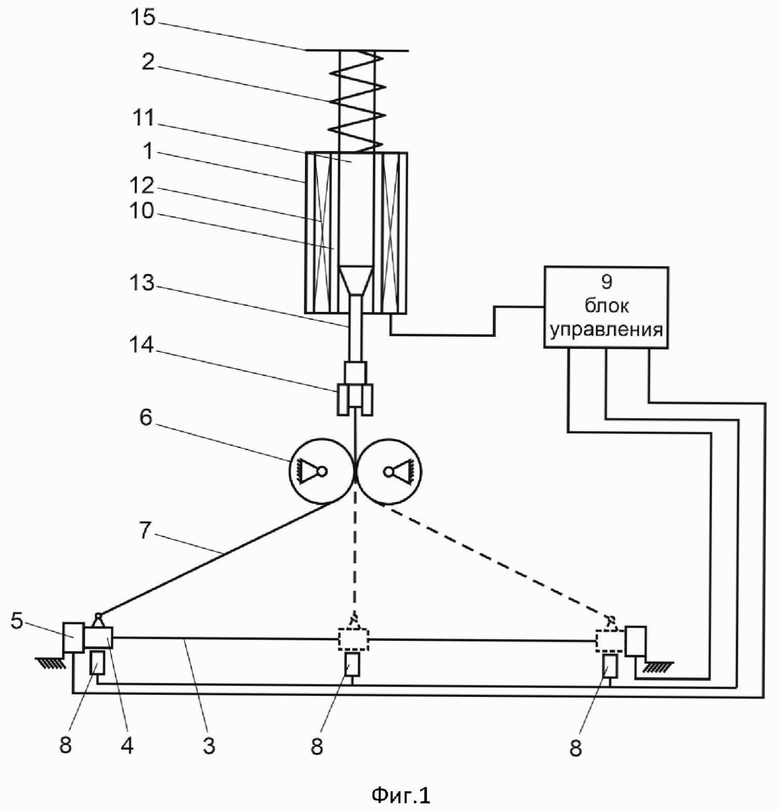
1. Способ получения возвратно-поступательного движения выходного звена электромагнитного привода, характеризующийся тем, что поступательное движение выходного звена по направляющей обеспечивают за счет силы притяжения электромагнитных фиксаторов, смонтированных у направляющей у крайних правого и левого положений выходного звена, а возвратное движение выходного звена по направляющей обеспечивают за счет потенциальной энергии пружины сжатия пружинного аккумулятора, смонтированной на выступающей из корпуса части магнитного сердечника между корпусом и опорой, смонтированной на конце магнитного сердечника, которую преобразуют в кинетическую энергию перемещения штока, смонтированного в продолжение магнитного сердечника, противоположный магнитному сердечнику конец которого соединен с выходным звеном гибким элементом, при этом потенциальную энергию пружинному аккумулятору сообщают от перемещения магнитного сердечника при воздействии на него магнитным полем катушки электромагнитного привода.
2. Мехатронный электромагнитный привод с пружинным аккумулятором, включающий линейный электромагнитный привод, содержащий подвижно смонтированный в корпусе магнитный сердечник, с возможностью продольного перемещения под действием магнитного поля, возникающего в катушке, смонтированной на корпусе привода, к одному из концов магнитного сердечника соосно смонтирован шток, выполненный выступающим за пределы корпуса привода, а противоположный штоку конец магнитного сердечника выполнен выступающим за торец корпуса для монтажа на нем соосно пружинного аккумулятора, выполненного в виде пружины сжатия, которая опирается своими торцами на корпус и на опору, смонтированную на торце выступающей части магнитного сердечника, с возможностью перемещения магнитного сердечника за счет потенциальной энергии, накопленной в пружинном аккумуляторе за счет деформации при движении магнитного сердечника под действием магнитного поля, возникающего в катушке, при этом для возвратного перемещения выходного звена за счет потенциальной энергии, накопленной в пружинном аккумуляторе, противоположный магнитному сердечнику конец штока соединен с выходным звеном гибким элементом, проходящим через опорный блок с возможностью изменения направления перемещения гибкого элемента, у направляющей смонтированы электромагнитные фиксаторы выходного звена, выполненные с возможностью обеспечения поступательного движения выходного звена в крайнее правое и крайнее левое положения за счет силы притяжения электромагнитов фиксаторов, у направляющей с возможностью определения положения выходного звена и управления катушкой электромагнитного привода и фиксаторами с помощью блока управления, к которому подключены катушка, фиксаторы и датчики положения.
| 0 |
|
SU158169A1 | |
| МЕХАТРОННЫЙ ПРУЖИННЫЙ ПРИВОД | 2020 |
|
RU2742446C1 |
| ЛИНЕЙНЫЙ ПРУЖИННЫЙ АККУМУЛЯТОР НА ОСНОВЕ ПРУЖИН СЖАТИЯ И РАСТЯЖЕНИЯ | 2023 |
|
RU2819635C1 |
| CN 118381249 A, 23.07.2024 | |||
| US 10724507 B2, 28.07.2020. | |||

