Изобретение относится к области машиностроение, а именно к передачам с аккумулированием и повторной отдачей энергии и предназначено для получения колебательных возвратно-поступательных перемещений в горизонтальной плоскости [F03G 7/08, F16H 33/20].
Из уровня техники известен ПРУЖИННЫЙ АККУМУЛЯТОР МЕХАНИЧЕСКОЙ ЭНЕРГИИ [RU 2159657 C1, опубл.: 27.11.2000], содержащий холостой и рабочий барабаны с закрепленной и накрученной на барабаны в противоположные стороны предварительно напряженной по всей длине рулонной ленточной пружиной, отличающийся тем, что на холостой вал двигателя установлена шестерня с радиусом, равным радиусу холостого барабана, а на рабочий вал с возможностью вращения установлена обойма с радиусом, большим радиуса шестерни, установленной на валу с холостым барабаном, в которой установлена рулонная ленточная пружина, закрепленная одним концом за рабочий барабан, а другим концом - за обойму, длина рулонной пружины в обойме больше либо равна длине рулонной пружины, накрученной на барабанах, и направление скручивания обеих пружин одинаково, на обойму установлена шестерня, объединенная кинематической связью с шестерней, установленной на вал с холостым барабаном.
Недостатком аналога является малая мощность привода, обусловленная высокими диссипативными потерями.
Из уровня техники известно УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ КОЛЕБАТЕЛЬНЫХ ВОЗВРАТНО-ПОСТУПАТЕЛЬНЫХ ПЕРЕМЕЩЕНИЙ В ГОРИЗОНТАЛЬНОЙ ПЛОСКОСТИ С УПРАВЛЯЕМЫМ ВЫСТОЕМ В КРАЙНИХ ПОЛОЖЕНИЯХ [Жавнер В., Мацко О., Жавнер М. Рекуперативные приводы для цикловых перемещений. – Palmarium Academic Publishing. – Henrich-Bocking-Str. 6-8, 66121 Saarbrucken, Deutchland: 2014. – С. 69], состоящее из блока управления, каретки, установленной с возможностью поступательного перемещения на направляющей, каретка оснащена фиксатором и шарнирно соединена с одним концом пружины растяжения, другой конец пружины растяжения соединен с корпусом, фиксатор соединен с первым распределителем, на корпусе смонтированы пневматические двигатели, соединенные с кареткой с возможностью обеспечения компенсации работы сил трения, пневматические двигатели снабжены герконовыми датчиками положения штока, соединены со вторым распределителем и оснащены клапанами быстрого выхлопа.
Недостатком аналога является низкая надежность привода, обусловленная сложностью конструкции.
Наиболее близким по технической сущности является ПРУЖИННЫЙ ПРИВОД [Жавнер В., Мацко О. Пружинные приводы для возвратно-поступательных перемещений. Журнал «Проблемы машиностроения и надежности машин» 2016 г., №1, с. 3-7. Издательство: Российская академия наук (Москва), ISSN: 0235-7119], содержащий основание, подвижную каретку, пневматический цилиндр с пружинной сжатия, расположенной в его штоковой полости, пневматический распределитель, датчик положения и систему управления.
Основной технической проблемой прототипа является невозможность обеспечить большие перемещения каретки из-за ограниченного штоковой областью пневматического цилиндра рабочего хода пружины, а также низкая надежность пружинного привода, обусловленная ассиметричностью пружины, что может привести к повреждению штока и поршня пневматического цилиндра.
Задачей изобретения является устранение недостатков прототипа.
Техническим результатом изобретения является повышение удельной производительности привода.
Указанный технический результат достигается за счет того, что мехатронный пружинный привод, содержащий основание с направляющей, подвижную каретку, пневматический цилиндр с пружиной, распределитель, датчик положения и блок управления, отличающийся тем, что каретка подвижно смонтирована на паре симметричных направляющих, смонтированных к основанию, шток пневматического цилиндра шарнирно соединен с подвижной кареткой, нижняя часть корпуса пневматического цилиндра шарнирно смонтирована между держателями, неподвижно соединенными с основанием, между верхней частью корпуса пневматического цилиндра и шарнирным соединением штока пневматического цилиндра симметрично относительно направляющих смонтированы пружины, по размеру и максимальному усилию соответствующие размеру и усилию пневматического цилиндра с учетом предварительной деформации упомянутых пружин с возможностью снижения затрат энергии на перемещение каретки, при этом пружины к верхней части корпуса пневматического цилиндра смонтированы шарнирно на одной оси вращения, к основанию симметрично относительно центрального положения каретки смонтированы датчики положения привода, соединенные с блоком управления.
В частности, пружины выполнены в виде пружин растяжения.
В частности, пружины выполнена из симметричного набора пружин.
В частности, в среднем положении каретки пружины выполнены с предварительным растяжением с возможностью уменьшения диссипативных потерь.
В частности, пружины выполнены с максимальным усилием, соответствующим усилию пневматического цилиндра.
В частности, распределитель выполнен трехпозиционным.
В частности, распределитель выполнен пятилинейным.
Краткое описание чертежей.
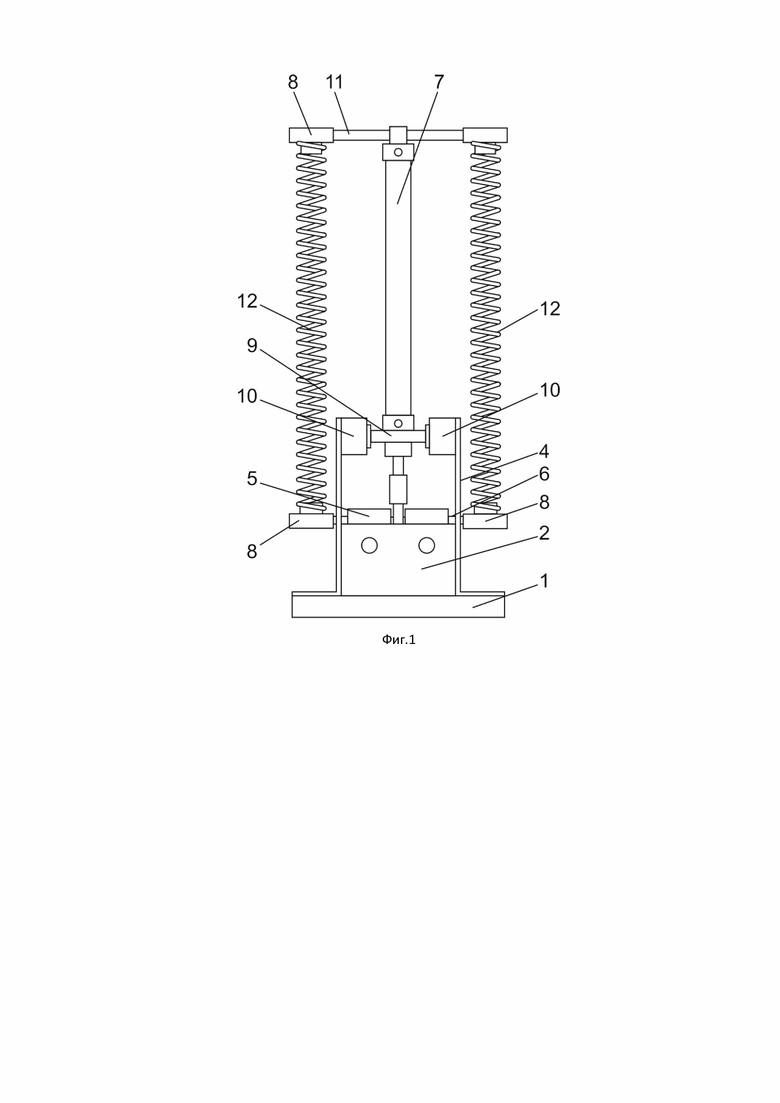
На фиг.1 показан мехатронный пружинный привод вид спереди.
На фиг.2 показан мехатронный пружинный привод вид сбоку.
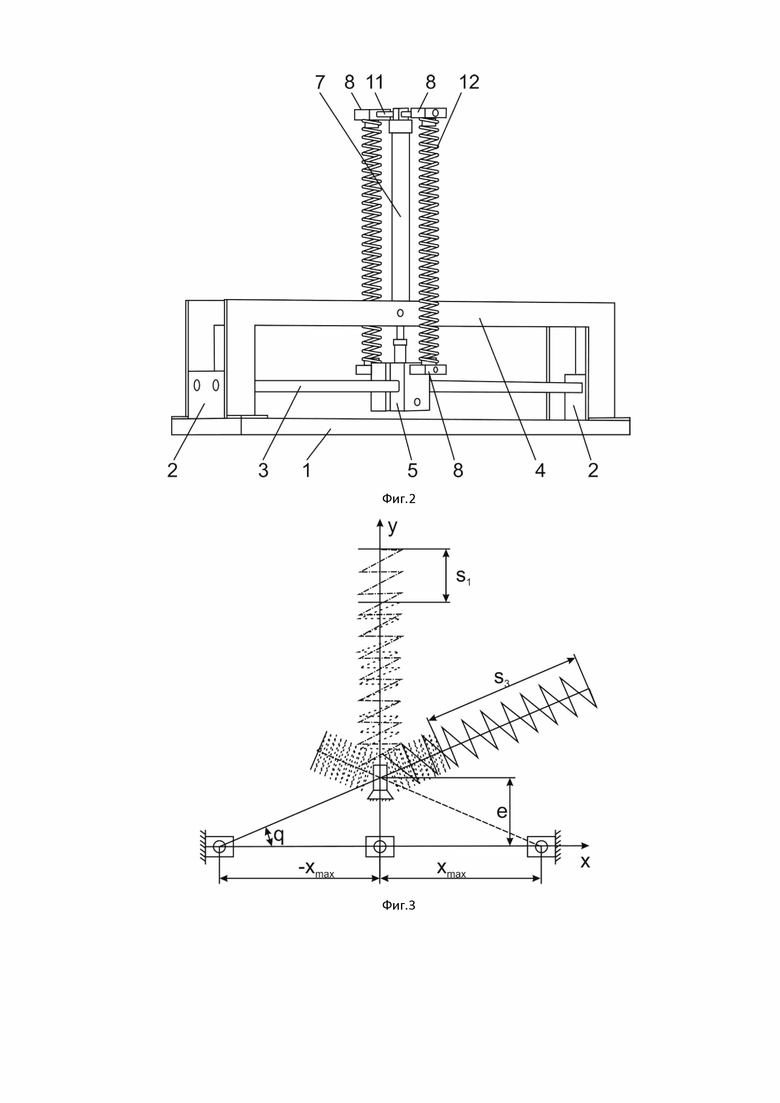
На фиг.3 показана схема мехатронного пружинного привода.
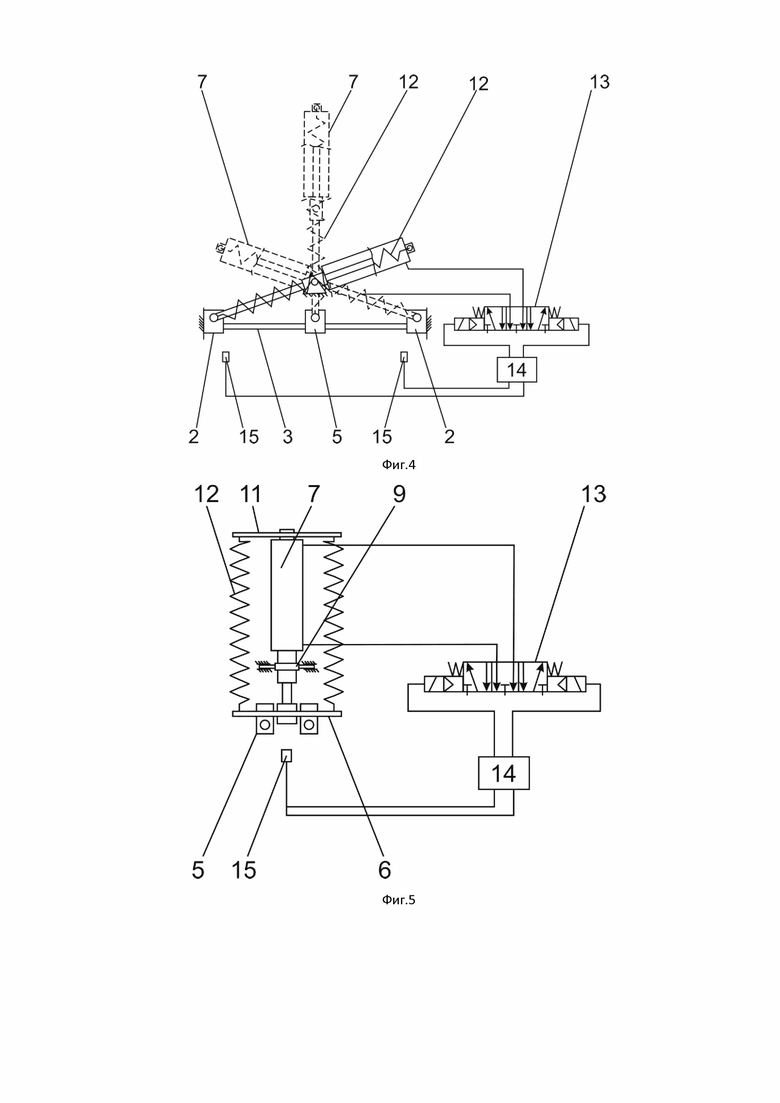
На фиг.4, 5 показаны кинематические схема мехатронного пружинного привода.
На фигурах обозначено: 1 – основание, 2 – упоры, 3 – направляющие штанги, 4 – держатели, 5 – каретка, 6 – нижняя перекладина, 7 - пневматический цилиндр, 8 – пружинные опоры, 9 – средняя перекладина, 10 – втулки, 11 – верхняя перекладина, 12 – пружины растяжения, 13 – распределитель, 14 – блок управления, 15 – датчики положения.
Осуществление изобретения.
Мехатронный пружинный привод состоит из основания 1 (см. Фиг.1) с торцов которого на вертикальных упорах 2 закреплены параллельные, расположенные в одной горизонтальной плоскости направляющие штанги 3. Между упорами 2 к их боковым сторонам симметрично смонтированы П-образные держатели 4 (см. Фиг.2). На направляющих штангах 3 подвижно смонтирована каретка 5, при этом каретка 5 смонтирована на направляющих штангах 3 через отверстия, выполненные в самой каретке 5. В верхней части каретки 5 поперек основанию 1, например, через отверстия, снабженные подшипниками качения (на фигурах не показаны) смонтирована нижняя перекладина 6. По центру нижней перекладины 6 и между направляющими штангами 3 смонтирован шток пневматического цилиндра 7. С торцов нижней перекладины 6 смонтированы пружинные опоры 8. Нижняя часть корпуса пневматического цилиндра 7 опирается на среднюю перекладину 9, которая, в свою очередь, шарнирно опирается на втулки 10, симметрично смонтированные с внутренней стороны по центру держателей 4 разъемным, например, фланцевым соединением. Шарнирное соединение средней перекладины 9 с втулками 10 обеспечивается, например, подшипниками качения (на фигурах не показаны), смонтированные во втулках 10. Через проушину в верхней части корпуса пневматического цилиндра 7 смонтирована верхняя перекладина 11, с торцов которой симметрично, аналогично нижней перекладине 6 смонтированы пружинные опоры 8. Между пружинными опорами 8 нижней 6 и верхней 11 перекладин симметрично смонтированы пружины растяжения 12. Пружины растяжения 12 могут быть выполнены из симметричных наборов пружин.
К входным отверстиям поршневой и штоковой полостей пневматического цилиндра 7 соединены выходы распределителя 13, имеющим три устойчивых положения золотника (на фигурах не показан), причём, в нейтральном положении золотника распределителя 13 обе упомянутые полости пневматического цилиндра 7 соединены с атмосферой.
Электрические входы распределителя 13 соединены с блоком управления 14. К блоку управления 14 подключены датчики положения 15, смонтированные на основании 1 вдоль вертикальных упоров 2.
К входным каналам распределителя 13 подключен источник сжатого воздуха.
В одном из вариантов реализации на основании 1 смонтированы датчики крайних положений (на фигурах не показаны) с возможностью контроля положения каретки 5 и обеспечения цикла работы привода.
Мехатронный пружинный привод работает следующим образом.
Перед использованием мехатронного пружинного привода подбирают пружины растяжения 12 и пневматический цилиндр 7 по размеру и усилиям, при условии, что усилие пневматического цилиндра 7 должно быть равно максимальному усилию пружин растяжения 12.
В блоке управления 14 задают время выстоя и время прохождения каретки 5 от одного датчика положения 15 к другому.
Для определения параметров усилия пружин растяжения 12, времени прохождения каретки 5 используют уравнение сохранения механической энергии без учета диссипативных потерь:
где Т – текущее значение кинетической энергии системы,  - максимальная потенциальная энергия пружин растяжения 12, а
- максимальная потенциальная энергия пружин растяжения 12, а  - максимальное рабочее удлинение пружин растяжения 12, e - расстояние по нормали между осью присоединения кулисного камня к основанию 1 до линии перемещения каретки 5, s1- предварительная деформация пружины (см. Фиг.3).
- максимальное рабочее удлинение пружин растяжения 12, e - расстояние по нормали между осью присоединения кулисного камня к основанию 1 до линии перемещения каретки 5, s1- предварительная деформация пружины (см. Фиг.3).
Текущее значение потенциальной энергии равно:
 .
.
Минимальное значение потенциальной энергии равно:
 ,
,
где c - жесткость пружины.
При наличии предварительного усилия пружины растяжения 12 изменение потенциальной энергии происходит в пределах E-Umin-E.
Время перемещения на расстояние S определяют как :
 ,
,
а с учетом выражения для накапливаемой в пружинах растяжения 12 потенциальной энергии:
 ,
,
где  безразмерный коэффициент, вычисляемый как:
безразмерный коэффициент, вычисляемый как:
 ,
,
где  =e/
=e/ ,
,  =
= /,
/, =
= /.
/.
Если предварительная деформация s1 пружин растяжения 12 будет равна по величине расстоянию е, то система превращается в линейную колебательную систему, в которой время перемещения каретки 5 из одного крайнего положения в другое не зависит от амплитуды колебаний и остаётся равным полупериоду колебаний.
Если предварительная деформация s1 пружин растяжения 12 будет больше расстояния е, то быстродействие привода увеличивается.
В исходном положении каретка 5 находится в крайнем левом положении xmax = S/2, где S – расстояние между крайними положениями каретки 5, при этом золотник (на фигурах не показан) распределителя 13 находится в крайнем левом или правом положении, при этом камера распределителя 13, соединена с поршневой полостью пневматического цилиндра 7, а штоковая область пневматического цилиндра 7 соединена с атмосферой (см. Фиг.4, 5).
Усилие, действующее на поршень пневматического цилиндра 7 от поданного из распределителя 13 давления больше усилия от растянутых пружин растяжения 12 Fmax и каретка 5 зафиксирована в положении, где
 .
.
Из блока управления 14 подают сигнал в распределитель 13 и переводят его золотник в противоположное исходному крайнее положение, открывают камеру распределителя 13, соединенной со штоковой полостью пневматического цилиндра 7, подают высокое давление в штоковую область, одновременно с этим соединяют в распределителе 13 поршневую область пневматического цилиндра 7 с атмосферой. Давлением воздуха действуют на поршень пневматического цилиндра 7 со стороны штоковой полости, втягивают шток и обеспечивают начало движения каретки 5 вправо. При прохождении каретки 5 через датчик положения 15, смонтированный в левой части основания 1 с упомянутого датчика 15 в блок управления 14 поступает сигнал, которым переводят золотник распределителя 13 в нейтральное положение и соединяют штоковую и поршневую полости пневматического цилиндра 7 с атмосферой. Дальнейшее движение каретки 5 осуществляют под действием пружин растяжения 12.
Усилие пружин растяжения 12 вдоль направления движения каретки 5 в этом случае равно:
 ,
,
где q – угол между штоком пневматического цилиндра 7 и направляющим штангами 3.
При прохождении кареткой 5 нейтрального положения дальнейшее движение осуществляется под действием сил инерции, осуществляют накопление потенциальной энергии U в пружинах растяжения 12.
При прохождении каретки 5 через датчик движения 15, смонтированный в правой части основания 1, с упомянутого датчика 15 в блок управления 14 поступает сигнал, которым переводят золотник распределителя 13 в противоположное положение и соединяют поршневую полость пневматического цилиндра 7 с источником сжатого воздуха, а штоковую полость с атмосферой, выдвигают шток и усилие на штоке пневматического цилиндра 7 больше усилия пружин растяжения 12 фиксирую каретку 5 в крайнем правом положении.
Технический результат изобретения - повышение удельной производительности привода достигается за счет монтажа каретки 5 на двойных направляющих штангах 3, смонтированных на основании 1 и симметричной установке между пружинными опорами 8 нижней 6 и верхней 11 перекладин пружин растяжения 12, обеспечивающих устойчивое положение каретки 5 по направляющим штангам 3 во время работы привода, снижающие вероятность выхода из строя привода и соответственно, повышение его удельной производительности. Кроме того, повышение удельной производительности привода достигается за счет увеличения потенциальной энергии привода и снижения диссипативных потерь на перемещение груза и трение за счет установки пружин растяжения 12 между кареткой 5 и пружинными опорами 8 верхней перекладины 11, обеспечивающей максимальный ход пневматического цилиндра 7, а также за счет точного подбора параметров жесткости пружин растяжения 12 и необходимого времени прохождения каретки 5 из одного крайнего положения в другое с учетом величины предварительной деформации упомянутых пружин 12 исходя из усилия пневматического цилиндра 7.
Изобретение относится к области машиностроения, а именно к передачам с аккумулированием и повторной отдачей энергии, и предназначено для получения колебательных возвратно-поступательных перемещений в горизонтальной плоскости. Мехатронный пружинный привод содержит основание с направляющей, подвижную каретку, пневматический цилиндр с пружиной, распределитель, датчик положения и блок управления. Каретка подвижно смонтирована на паре симметричных направляющих, смонтированных к основанию. Шток пневматического цилиндра шарнирно соединен с подвижной кареткой. Нижняя часть корпуса пневматического цилиндра шарнирно смонтирована между держателями, неподвижно соединенными с основанием. Между верхней частью корпуса пневматического цилиндра и шарнирным соединением штока пневматического цилиндра симметрично относительно направляющих смонтированы пружины, по размеру и максимальному усилию соответствующие размеру и усилию пневматического цилиндра с учетом предварительной деформации упомянутых пружин с возможностью снижения затрат энергии на перемещение каретки. Пружины к верхней части корпуса пневматического цилиндра смонтированы шарнирно на одной оси вращения. К основанию симметрично относительно центрального положения каретки смонтированы датчики положения привода, соединенные с блоком управления. Изобретение направлено на повышение удельной производительности привода. 6 з.п. ф-лы, 5 ил.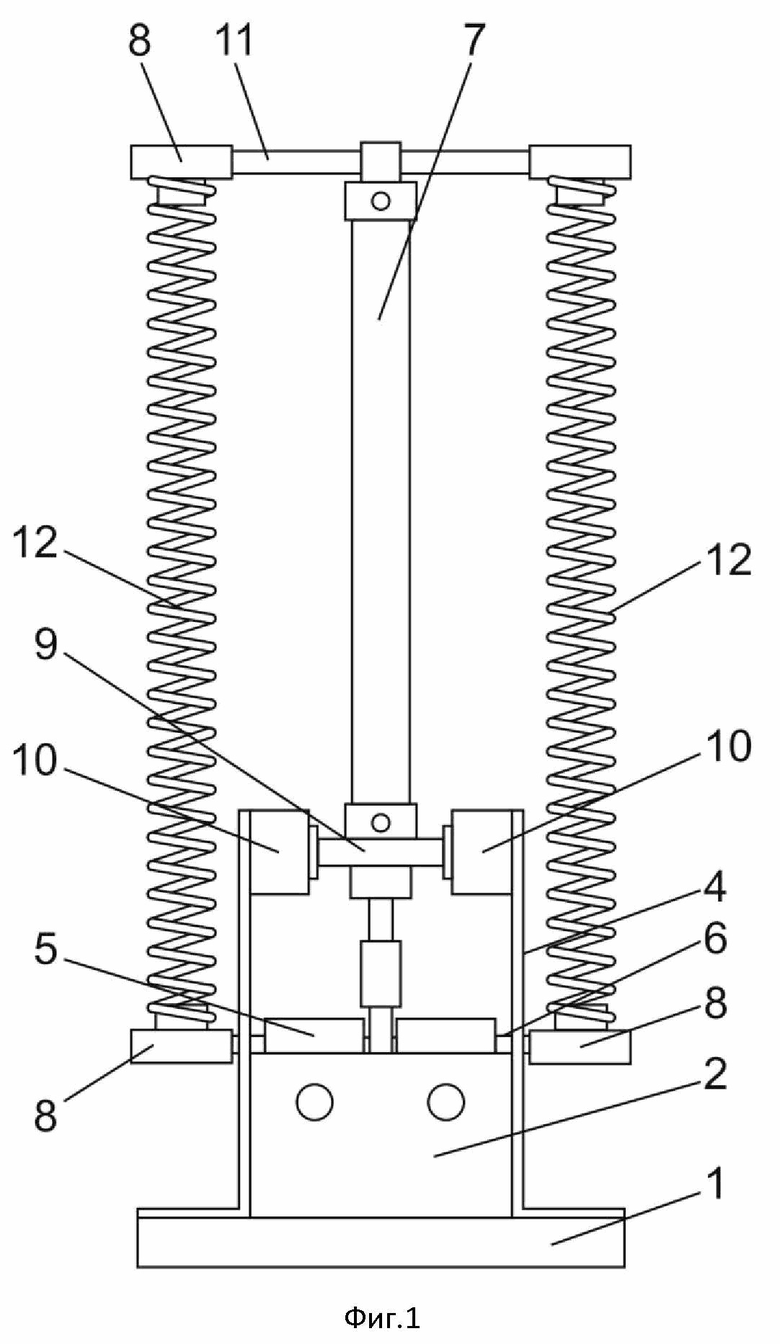
1. Мехатронный пружинный привод, содержащий основание с направляющей, подвижную каретку, пневматический цилиндр с пружиной, распределитель, датчик положения и блок управления, отличающийся тем, что каретка подвижно смонтирована на паре симметричных направляющих, смонтированных к основанию, шток пневматического цилиндра шарнирно соединен с подвижной кареткой, нижняя часть корпуса пневматического цилиндра шарнирно смонтирована между держателями, неподвижно соединенными с основанием, между верхней частью корпуса пневматического цилиндра и шарнирным соединением штока пневматического цилиндра симметрично относительно направляющих смонтированы пружины, по размеру и максимальному усилию соответствующие размеру и усилию пневматического цилиндра с учетом предварительной деформации упомянутых пружин с возможностью снижения затрат энергии на перемещение каретки, при этом пружины к верхней части корпуса пневматического цилиндра смонтированы шарнирно на одной оси вращения, к основанию симметрично относительно центрального положения каретки смонтированы датчики положения привода, соединенные с блоком управления.
2. Привод по п. 1, отличающийся тем, что пружины выполнены в виде пружин растяжения.
3. Привод по п. 1, отличающийся тем, что пружины выполнены из симметричного набора пружин.
4. Привод по п. 1, отличающийся тем, что в среднем положении каретки пружины выполнены с предварительным растяжением с возможностью уменьшения диссипативных потерь.
5. Привод по п. 1, отличающийся тем, что пружины выполнены с максимальным усилием, соответствующим усилию пневматического цилиндра.
6. Привод по п. 1, отличающийся тем, что распределитель выполнен трехпозиционным.
7. Привод по п. 1, отличающийся тем, что распределитель выполнен пятилинейным.
| Жавнер В., Мацко О | |||
| Пружинные приводы для возвратно-поступательных перемещений | |||
| Журнал "Проблемы машиностроения и надежности машин", 2016 г., N1, с | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| 0 |
|
SU158169A1 | |
| ПРУЖИННЫЙ АККУМУЛЯТОР МЕХАНИЧЕСКОЙ ЭНЕРГИИ | 1999 |
|
RU2159657C1 |
| KR 101766770 B1, 09.08.2017 | |||
| US 7703562 B2, 27.04.2010. | |||

