Область техники
Изобретение относится к области железнодорожной автоматики и телемеханики; оно может быть использовано в системах автоматического управления движением поездов на перегонах и станциях.
Уровень техники
Известно приспособление для получения графиков движения (ГД) поездов, в котором движки выполнены в виде стерженьков различной длины, изображающих отрезки ГД между перегонами и снабженных по концам пружинящими усиками, служащими для удержания стерженьков между укрепленными на доске прутьями или параллельными рейками с делениями (отрезок равен 2 мин.), снабженными для этой цели желобками. Для нанесения составленных ГД применены бланки с сетками ГД, удерживаемые с задней стороны доски планками. Каждый движок соответствует времени прохода поезда по перегонам (в зависимости от наклона движка, обусловленного его длиной); они сделаны раздвижными и окрашены в особый цвет для каждого рода поездов. (Патент SU 31679 А1, МПК B6L 27/00, G07C 5/00, 01.09.1932).
Недостатком данного устройства является отсутствие возможности программной настройки интервалов движения поездов, выбора мест, времен ввода и снятия составов, а также проведения плановых профилактических осмотров и регулировочных отстоев.
Известно устройство для регулирования движения поездов метрополитена, относящееся к средствам автоматизации процесса пассажирских перевозок и предназначенное для работы в автоматизированной системе управления метрополитена, содержащее блоки определения загрузки поезда и блок вычисления интенсивности движения поездов, которое с целью повышения точности снабжено мультиплексором, блоком задания станций, выводы которого подключены соответственно к установочным входам блока вычисления интенсивности движения поездов и адресным входам мультиплексора, информационные выходы и входы которого соединены соответственно с информационными входами блока вычисления интенсивности движения поездов и выходами блоков определения загрузки поезда, выполненных в виде весоизмерительных блоков (Патент SU 1493527 А1, МПК B61L 27/04, 12.07.1987).
Недостатком данного устройства является отсутствие возможности прогнозирования времени стоянки поезда на станции.
Известно устройство автоматического ведения поездов метрополитена, содержащее программное устройство отправления поездов, включающее программную машину, установленную на центральном посту; приборы контроля фактического движения поездов, расположенные на пути; решающие устройства, выполненные в виде блоков сравнения времени программного и фактического движения поездов; линию связи между поездными и напольными устройствами, расположенную вдоль пути, и приемно-исполнительные устройства, установленные на поездах, в которых с целью программирования времени движения поездов от одной станции до другой и упрощения способа снятия и включения в программу дополнительных поездов, программные устройства центрального поста снабжены многоходовыми регистрами сдвига в количестве, равном числу станций на линии; первая ячейка первого регистра подключена к программной машине отправления поездов с первой станции и через ключ - к генератору импульсов, первая ячейка каждого регистра подключена к реле программного отправления поезда с соответствующей станции, ячейка каждого регистра, программирующая время прохождения поездом точки пути нормального отключения двигателей, - к реле программного прохода поездом этой точки, а каждая последняя ячейка каждого регистра - к первой ячейке следующего регистра; с целью определения дополнительного времени включения двигателей поездов для ликвидации опоздания, возникшего вследствие его задержки на станции или перегоне, решающие устройства установлены на станции, и их блоки сравнения времени программного и фактического отправления поезда со станции содержат электронное спусковое устройство и два подключенных к нему конденсатора, один из которых подключен к источнику напряжения через контакт реле программного отправления поезда со станции, другой - через контакт реле прибора «контроля фактического отправления», а спусковое устройство подключено к реле подачи сигнала об окончании дополнительного времени включения двигателей поезда; с целью определения дополнительного времени включения двигателей поезда для ликвидации опоздания, возникающего вследствие ухудшения ходовых качеств, в решающем устройстве установлено подключенное к источнику напряжения через контакт реле приборов контроля «фактического отправления» и «хода», электронное реле времени для фиксации превышения нормального времени движения поезда по «контрольному участку» и второе электронное спусковое устройство с двумя подключенными к нему конденсаторами, один из которых подключен к источнику питания через контакт электрического реле времени, а другой - через контакт реле первого электронного спускового устройства; второе спусковое устройство подключено к реле подачи сигнала об окончании дополнительного времени включения двигателей поезда (Патент SU 497184 А1, МПК B61L 3/20, G05B 19/34, 30.12.1975).
Недостатком данного устройства является использование аналоговой элементной базы для программирования времени движения поезда, а также отсутствие описания законов определения дополнительного времени включения двигателей поезда для ликвидации опоздания и рассмотрения возможности не сокращения времени хода, а его увеличения для ликвидации сбойной ситуации.
Известно устройство для автоведения поездов метрополитена, относящееся к железнодорожной автоматике, предназначенное для автоматизации функций по управлению движением поездов метрополитена, содержащее на центральном посту управления программный блок задания ГД, выход которого соединен с одним входом блока выключения тяги поездов, соединенного с расположенным на станции генератором возбуждения датчика выключения тяги, индуктивно связанным через датчик выключения тяги с установленным на поезде приемным блоком, выход которого связан с установленным на перегоне в зоне возможного выключения тяги датчиком обратной связи, выход которого соединен с другим входом блока выключения тяги поездов, триггер памяти команд графикового отправления, вход которого соединен с выходом программного блока задания ГД, а выход - с входом генератора возбуждения шлейфа зоны отправления поездов со станции, второй вход которого подключен к выходу блока отсчета минимальной стоянки, один вход которого соединен с блоком задания времени, другой вход - с датчиком прибытия поездов на станцию, а вход сброса подключен к входу сброса триггера памяти команд графикового отправления и к датчику отправления поездов, причем выход генератора возбуждения шлейфа зоны отправления поездов через шлейф индуктивно связан с приемным блоком на поезде. (Патент SU 768686 Al B61L 21/08, 07.10.1980).
Недостатком известного устройства является потеря точности регулирования движения поездов при отправлении со станций при больших отклонениях от заданного ГД (более одного интервала).
Известна полезная модель, относящаяся к области управляющих систем, которая может быть использована для автоматизации управления и обеспечения безопасности движения пассажирских электропоездов, в частности метрополитена, и имеет расширенные функциональные возможности, повышенные эффективность контроля и уровень безопасности движения пассажирских электропоездов. Система управления движением электроподвижного состава содержит два модуля внешних устройств, входы первого модуля соединены с одним из датчиков скорости и пути, катушкой индуктивного канала и датчиком коррекции пути, входы второго модуля соединены с другим датчиком скорости и пути, катушкой индуктивного канала и датчиком коррекции пути, к выходам модулей внешних устройств подключены датчики коррекции пути, а межмодульный CAN-интерфейс подключен к входам-выходам обоих модулей внешних устройств, входам-выходам блока терминала машиниста, входам-выходам двух бортовых компьютеров и к входам-выходам блока радиосвязи с антенной, отличающаяся тем, что в нее дополнительно введены два модуля обработки, два модуля команд, при этом модули внешних устройств, датчики скорости и пути, катушки индуктивного канала, модули обработки и модули команд образуют имеющую возможность автономной работы подсистему безопасности, в которой каждая группа дискретных входов и выходов модулей обработки подключена к поездным проводам, а входы-выходы подключены к межмодульному CAN-интерфейсу, к которому своими входами-выходами подключены модули команд, вторые входы-выходы которых подключены к вагонному CAN-интерфейсу, а входы и выходы подключены к блоку управления электропневмоклапаном, при этом два бортовых компьютера, блок терминала машиниста, два датчика коррекции пути и блок радиосвязи с антенной образуют подсистему автоведения. (Патент RU 191737 U1 B61L 27/00 B61L 3/00, 14.12.2018).
Недостатком данного устройства является отсутствие реализации централизованного управления.
Известно устройство управления движением поездов метрополитена, относящееся к области железнодорожной автоматики, в частности, к устройствам автоматического управления движением поездов метрополитена, в котором с целью расширения функциональных возможностей станционное устройство снабжено блоками задержки команды отправления, блоками ограничения скорости и схемами совпадения - по числу имеющихся типов поездов, второй схемой «ИЛИ» и блоком определения типа поезда, выходы которого соединены с одними входами соответствующих схем совпадения, другие входы которых подключены к выходам соответствующих блоков задержки команды отправления, третьи входы схем совпадения объединены и соединены с часовой станцией, выходы схем совпадения подключены ко входам второй схемы «ИЛИ», выход которой присоединен к схеме выключения тяги, вход блока определения типа поезда соединен с трактом связи между поездным и станционным устройствами, а его выходы - по числу имеющихся типов поездов соединены со входами соответствующих блоков ограничения скорости, выходы которых присоединены к тракту связи между поездным и станционным устройствами, входы блоков задержки команды отправления соединены с выходом первой схемы «ИЛИ». (Патент SU727504 А2 B61L 21/08, 15.04.1980).
Недостатком данного устройства является то, что при больших отклонениях от ГД центральный пункт может осуществлять только коррекцию интервала, а не корректировки планового ГД с точки зрения количества составов на линии и порядка их следования.
Известен автоматизированный комплекс управления перевозочным процессом городской рельсовой транспортной системы (ГРТС), обеспечивающий в случае изменения условий функционирования ГРТС автоматизированную корректировку ГД транспортных средств (ТС), работы персонала и обслуживания инфраструктуры с последующей автоматизированной реализацией принятых решений и прогнозированием необходимых долгосрочных управленческих воздействий; позволяющий повысить оперативность управления; расширить базу знаний, используемую при планировании движения и управления им, согласовать базы данных, используемые на разных уровнях планирования и управления движением, а также повысить уровень автоматизации управления ТС и инфраструктурой, обеспечивающей движение ТС в соответствии с заданным ГД. Технический результат достигается построением замкнутого контура автоматизированного анализа, прогнозирования потребностей, планирования и управления движением ТС, работой персонала и обслуживанием инфраструктуры; наличием цифрового двойника ГРТС.(Патент RU 2791353 G06Q 50/30; B61L; B61L 27/04, 07.03.2023).
Недостатком данного автоматизированного комплекса является отсутствие конкретизации возможностей планирования и централизованного управления ГРТС.
Раскрытие изобретения Задача, на решение которой направлено изобретение, заключается в создании устройства автоматизированного централизованного управления движением транспортных средств (ТС) городской рельсовой транспортной системы (ГРТС), обеспечивающего планирование этого движения, управление движением в соответствии с плановым графиком движения (ГД), автоматизированную корректировку ГД ТС в случае отклонения исполненного ГД от планового на основе прогнозирования развития ситуации и последующую автоматизированную реализацию принятых решений.
Технический результат заключается в повышении равномерности движения и оперативности управления; расширении базы знаний, используемой при планировании движения и управлении им в соответствии с заданным ГД.
Технический результат достигается посредством построения замкнутого контура автоматизированного долгосрочного и оперативного планирования, управления движением ТС, анализа достигнутых результатов, включающего в себя блок формирования задания на построение ГД ТС, результаты работы которого подаются на вход блока построения и сравнения ГД. Результаты работы блока построения и сравнения ГД при корректировке их в блоке сравнения информации о плановых и реальных значениях местоположения и скорости ТС на участке управления с учетом работы блока сбора и обработки оперативной информации участвуют в формировании одного из управленческих решений по: организации движения ТС согласно ГД, управлению значениями времен хода и стоянок ТС, управлению движением ТС по оперативному ГД. Результаты работы блока принятия решения формируются посредством блока переключения между режимами управления движением ТС.На основании результатов работы блока принятия решения и в соответствии с состоянием объектов ГРТС в блоке модификации данных для построения ГД модифицируются исходные данные для построения ГД, а в блоках управления движением ТС в соответствии с ГД и управления тяговым приводом ТС решаются задачи автоматизированного управления движением ТС в соответствии с составленным ГД. Принятое в блоке принятия решений решение через блок модификации данных для построения ГД участвует в корректировке задания на построение ГД ТС, а также построении и сравнении ГД. В блоке управления движением ТС в соответствии с ГД реализуется управление временем хода ТС в соответствии с ГД и принятым в блоке принятия решений решением, управляющие воздействия из блока управления движением ТС в соответствии с ГД передаются на блок управления тяговым приводом ТС, передающий параметры оперативного управления движением ТС в блок сбора и обработки оперативной информации. Все блоки образуют единый контур управления. Организация обмена информацией обеспечивает реализацию обратной связи для учета реальной ситуации на ГРТС.
Устройство автоматизированного централизованного управления движением ТС ГРТС отличается тем, что в рамках единого устройства автоматизированного централизованного управления движением ТС на основе единых принципов решаются задачи, как предварительного, в ходе которого равномерное расположение выполняющих перевозку пассажиров ТС в каждый момент времени в течение всего периода такой перевозки обеспечивается за счет равномерного распределения мест начала и окончания движения ТС, моментов включения ТС в перевозку пассажиров и исключения из нее, а также наискорейшего выравнивания интервалов движения ТС по отправлению из ОП, так и оперативного, в случае отклонения от предварительно составленного ГД, планирования движения. Принятие решения о необходимости построения обновленного ГД в одном из доступных режимов принимается на основании сравнения максимального объема ресурсов, доступных для компенсации возмущений, с величиной существующих возмущений. При недостаточности ресурсов реализуется переход к двухэтапному построению оперативного ГД. На первом этапе выполняется построение фрагмента ГД, предназначенного для организации управления во время сбоя. На втором - построение фрагмента ГД, предназначенного для организации управления после ликвидации причин сбоя с использованием алгоритмов, обеспечивающих минимум времени перехода от оперативного к плановому ГД, что достигается выбором мест оборота ТС из условий равномерности движения ТС ГРТС по каждой из возникающих замкнутых траекторий движения ТС при отсутствии взаимодействия через систему обеспечения безопасности движения (СОБД) и недопущении превышающих нормативы интервалов прибытия ТС в остановочные пункты (ОП). Управление в первую очередь применяется к ТС, наиболее удаленным от своего планового местоположения. При наличии достаточных ресурсов реализуется управление временами хода и стоянки ТС на основе прогнозирования возможного увеличения длительности стоянки впередиидущего ТС до его прибытия на находящийся впереди по ходу движения ОП и первоочередного использования возможности увеличения времени хода сзади идущего ТС с целью недопущения достижения им ограничения скорости, задаваемого СОБД, и дополнительно позволяет минимизировать время компенсации рассогласования планового и исполненного ГД за счет предоставления возможности выбора параметров корректировки среди ресурсов времени стоянки и/или времени хода.
Краткое описание чертежа
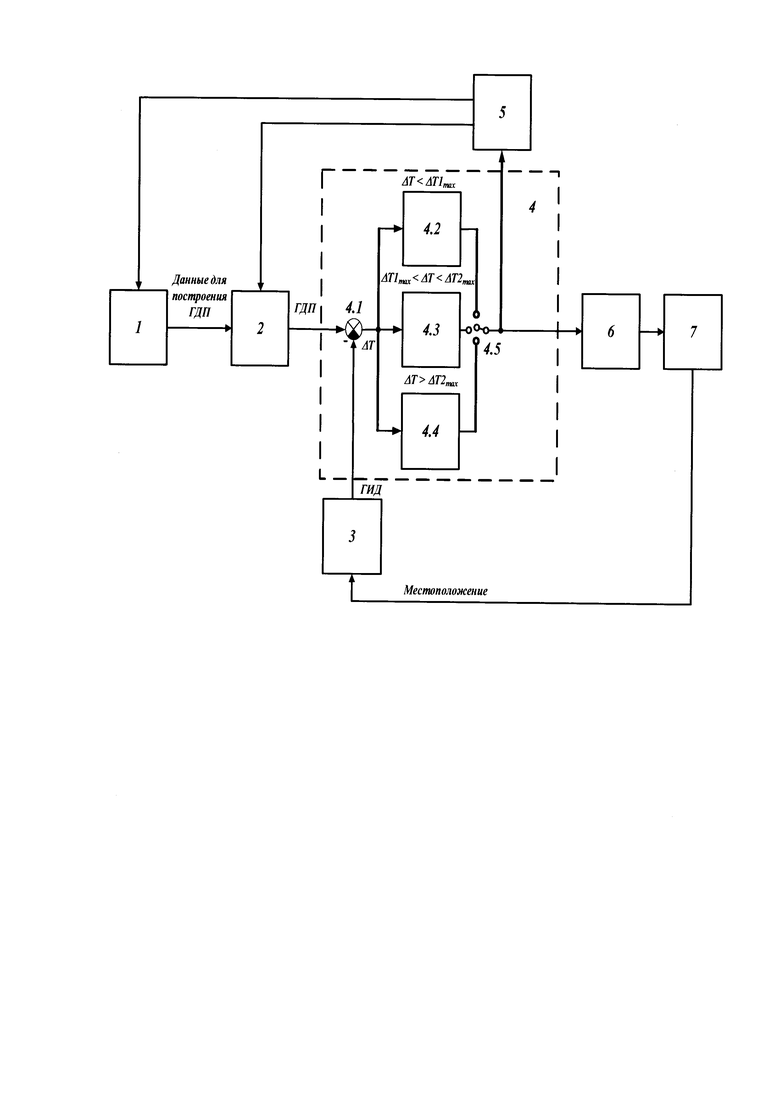
На фигуре представлена структурная схема устройства автоматизированного централизованного управления движением ТС:
1 - блок формирования задания на построение ГД;
2 - блок построения и сравнения ГД;
3 - блок сбора и обработки оперативной информации;
4 - блок принятия решения;
4.1 - блок сравнения информации о плановых и реальных значениях местоположения и скорости ТС на участке управления, поступающей из блоков 2 и 3;
4.2 - блок организации движения ТС согласно ГД;
4.3 - блок управления значениями времен хода и стоянок ТС;
4.4 - блок управления движением ТС по оперативному ГД;
4.5 - блок переключения между режимами управления движением ТС;
5 - блок модификации данных для построения ГД;
6 - блок управления движением ТС в соответствии с ГД;
7 - блок управления тяговым приводом ТС.
Осуществление изобретения
Сущность предлагаемого технического решения поясняется чертежом, на котором представлена структурная схема предлагаемого в патенте устройства автоматизированного централизованного управления движением ТС ГРТС.
В рамках функционирования блока 1 формируется задание на построение ГД, а именно:
- размеры движения;
- начальные и конечные условия построения: астрономическое время начала, конца и соответствующая им расстановка ТС при построении планового ГД или текущее положение ТС на участке управления ГРТС при построении оперативного ГД;
- возможности по организации пассажирского движения;
- требования к организации маневровых передвижений, обслуживанию ТС.
На вход блока 1 поступает информация от блока 5, а выход блока 1 связан с входом блока 2.
Сформированное задание используется в качестве исходных данных в блоке 2, в котором решаются задачи автоматизированного построения планового или оперативного ГД, в зависимости от информации, поступающей из блоков 1 и 5.
При построении планового ГД реализуется способ, отличающийся от известных тем, что равномерное расположение выполняющих перевозку пассажиров ТС на участке управления ГРТС, по которому осуществляется эта перевозка, в каждый момент времени в течение всего периода такой перевозки обеспечивается за счет равномерного распределения мест начала и окончания движения ТС, моментов включения ТС в перевозку пассажиров и исключения из нее, а также наискорейшего выравнивания интервалов движения ТС по отправлению из ОП.
При построении оперативного ГД реализуется способ, отличающийся тем, что построение разделяется на два этапа. Первый - построение фрагмента ГД, предназначенного для организации управления во время сбоя, второй - построение фрагмента ГД, предназначенного для организации управления после ликвидации причин сбоя. При этом предлагается использовать алгоритмы, обеспечивающие минимум времени перехода от оперативного к плановому ГД, что достигается выбором мест оборота ТС из условий равномерности движения ТС ГРТС по каждой из возникающих замкнутых траекторий движения ТС при отсутствии взаимодействия через СОБД и недопущении превышающих нормативы интервалов прибытия ТС в ОП. Управление в первую очередь применяется к ТС, наиболее удаленным от своего планового местоположения. Время, затрачиваемое на построение оперативного ГД, должно быть таким, чтобы в процессе построения оперативного ГД не возникло дополнительного рассогласования между плановым и оперативным ГД.
На вход блока 2 поступает информация от блоков 1 и 5, а выход блока 2 связан с входом блока 4.
В рамках функционирования блока 3 осуществляется сбор информации о местоположении, скорости и весе ТС на участке управления.
На вход блока 3 поступает информация от блока 7, а выход блока 3 связан с входом блока 4.
В рамках функционирования блока 4 решаются следующие задачи:
- выполняется сравнение информации о плановых и реальных значениях местоположения и скорости ТС на участке управления, поступающей из блоков 2 и 3 (блок 4.1), реализуется способ принятия решения о продолжении управления в соответствии с ГД или построении оперативного ГД при наличии отклонения от планового ГД, отличающийся тем, что решение принимается на основе сравнения максимального объема ресурсов, доступных для компенсации возмущений, с величиной существующих возмущений.
- на основании результатов сравнения принимается решение о необходимости построении обновленного ГД в одном из доступных режимов;
- если выбранный показатель оценки величины рассогласования между плановыми и реальными значениями местоположения и скорости ТС на участке управления ΔT меньше порогового значения ΔT1max, то управление реализуется в соответствии с действующим ГД (блок 4.2);
- если выбранный показатель оценки величины рассогласования между плановыми и реальными значениями местоположения и скорости ТС на участке управления ΔT больше порогового значения ΔT1max и меньше порогового значения ΔT2max, то управление передается в блок 4.3, в котором реализуется способ управления, отличающийся наличием прогнозирования возможного увеличения длительности стоянки впередиидущего ТС до его прибытия на находящийся впереди по ходу движения ОП и первоочередного использования возможности увеличения времени хода сзади идущего ТС с целью недопущения достижения им ограничения скорости, задаваемого СОБД;
- если выбранный показатель оценки величины рассогласования между плановыми и реальными значениями местоположения и скорости ТС на участке управления ΔT больше порогового значения ΔT2max, то реализуется управление, как во время большого сбоя, или восстановление движения по ГД после сбоя (блок 4.4), для чего подается сигнал инициирования работы блока 5;
- переключение между режимами управления происходит в блоке 4.5.
На вход блока 4 поступает информация от блоков 2 и 3, а выход блока 4 связан с входами блоков 5 и 6.
В рамках функционирования блока 5 решаются задачи модификации исходных данных для построения ГД на основании принятого в блоке 4 решения с учетом возможных изменений в обстановке на ГРТС.
На вход блока 5 поступает информация от блока 4, а выход блока 5 связан с входом блоков 1 и 2.
В рамках функционирования блока 6 решаются задачи управления временем хода ТС в соответствии с принятым в блоке 4 решением и ГД.
На вход блока 6 поступает информация от блока 5, а выход блока 6 связан с входом блока 7.
В рамках функционирования блока 7 решаются задачи подачи управляющих воздействий на тяговый привод.
На вход блока 7 поступает информация от блока 6, а выход блока 7 связан с входом блока 3.
| название | год | авторы | номер документа |
|---|---|---|---|
| Интеллектуальный комплекс управления перевозочным процессом городской рельсовой транспортной системы (ГРТС) | 2022 |
|
RU2791353C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДА | 2023 |
|
RU2818401C1 |
| СИСТЕМА ДИСПЕТЧЕРСКОЙ ЦЕНТРАЛИЗАЦИИ | 2012 |
|
RU2511197C1 |
| СИСТЕМА ДЛЯ ОПЕРАТИВНОГО УПРАВЛЕНИЯ ПОЕЗДНОЙ РАБОТОЙ НАПРАВЛЕНИЯ ЖЕЛЕЗНОДОРОЖНОЙ СЕТИ | 2012 |
|
RU2500563C1 |
| УСТРОЙСТВО ПОСТРОЕНИЯ ЭНЕРГОСБЕРЕГАЮЩИХ ГРАФИКОВ ДВИЖЕНИЯ ПОЕЗДОВ | 2011 |
|
RU2487036C1 |
| Система для управления работой сортировочных станций направления железнодорожной сети | 2018 |
|
RU2671790C1 |
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ РАБОТОЙ СОРТИРОВОЧНЫХ СТАНЦИЙ НАПРАВЛЕНИЯ ЖЕЛЕЗНОДОРОЖНОЙ СЕТИ | 2012 |
|
RU2500558C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ И СПОСОБ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ЕЮ РЕАЛИЗУЕМЫЙ | 2014 |
|
RU2572278C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ПОЕЗДНОЙ РАБОТОЙ НАПРАВЛЕНИЯ ЖЕЛЕЗНОДОРОЖНОЙ СЕТИ В УСЛОВИЯХ ПРОВЕДЕНИЯ РЕМОНТНЫХ РАБОТ | 2012 |
|
RU2501697C1 |
| Система мониторинга подвижного состава и инфраструктуры железнодорожного транспорта на основе беспроводных технологий | 2022 |
|
RU2794600C1 |
Изобретение относится к области железнодорожной автоматики, телемеханики и связи. Устройство автоматизированного централизованного управления движением транспортного средства (ТС) содержит блок (1) формирования задания на построение графика движения (ГД), блок (2) автоматизированного построения планового или оперативного ГД, в зависимости от информации, поступающей из блока (1) и блока (5) модификации данных для построения ГД, блок (3) сбора информации о местоположении, скорости и весе ТС, блок (4) принятия решения, блок (6) управления движением ТС и блок (7) управления тяговым приводом ТС. Блок (4) включает в себя блок сравнения (4.1) информации о плановых и реальных значениях местоположения и скорости ТС на участке управления, блок (4.2) организации движения ТС согласно ГД, блок (4.3) управления значениями времен хода и стоянок ТС, блок (4.4) управления движением ТС по оперативному ГД и блок (4.5) переключения между режимами управления движением ТС. Блок (5) выполнен с возможностью для построения ГД на основании принятого в блоке (4) решения и состояния объектов ГРТС. Технический результат заключается в повышении равномерности движения и оперативности управления и расширении базы знаний, используемой при планировании движения и управлении им. 1 ил.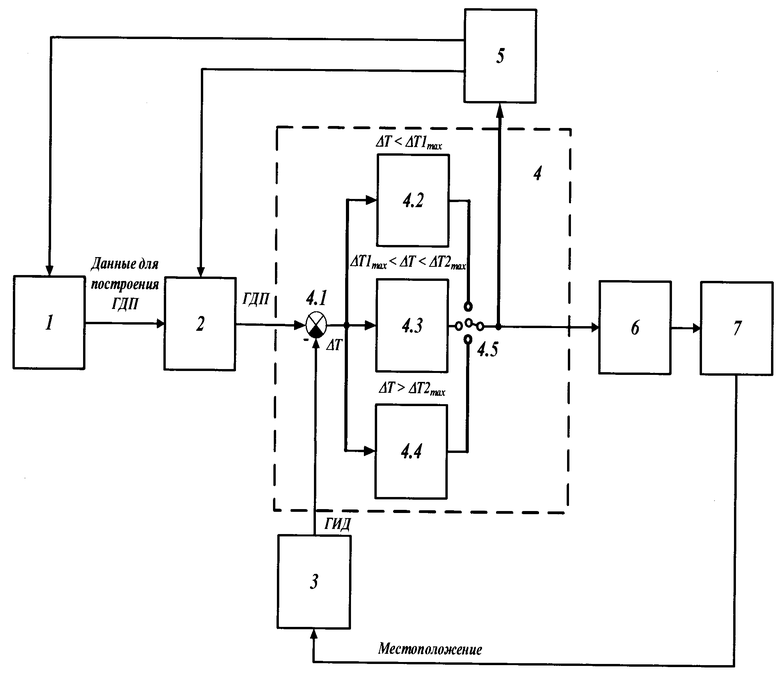
Устройство автоматизированного централизованного управления движением транспортного средства (ТС), характеризующееся тем, что включает блок (1) формирования задания на построение графика движения (ГД), блок (2) автоматизированного построения планового или оперативного ГД, в зависимости от информации, поступающей из блоков (1) и блока (5) модификации данных для построения ГД, блок (3) сбора информации о местоположении, скорости и весе ТС, блок (4) принятия решения выполнен с возможностью сравнения в блоке сравнения (4.1) информации о плановых и реальных значениях местоположения и скорости ТС на участке управления, поступающей из блоков (2) и (3), управления в соответствии с действующим ГД в блоке (4.2) организации движения ТС согласно ГД, если показатель оценки величины рассогласования между плановыми и реальными значениями местоположения и скорости ТС на участке управления меньше порогового значения, с возможностью управления во время малого сбоя в блоке (4.3) значениями времен хода и стоянок ТС, в рамках которого прогнозируется возможное увеличение длительности стоянки впередиидущего ТС до его прибытия на находящийся впереди по ходу движения остановочный пункт (ОП) и первоочередного использования возможности увеличения времени хода сзади идущего ТС, с возможностью управления во время большого сбоя и при восстановлении движения по ГД после сбоя в блоке (4.4), в котором разделяют процесс построения на два этапа, на первом из которых выполняется построение фрагмента ГД, предназначенного для организации управления во время сбоя, а на втором - построение фрагмента ГД, предназначенного для организации управления после ликвидации причин сбоя с использованием алгоритмов, обеспечивающих минимум времени перехода от оперативного к плановому ГД за счет такой организации регулировочных действий, при которой управление в первую очередь применяется к ТС, наиболее удаленным от своего планового местоположения, выбора мест оборота ТС из условий равномерности движения ТС городской рельсовой транспортной системы (ГРТС) по каждой из возникающих замкнутых траекторий движения ТС при отсутствии взаимодействия через систему обеспечения безопасности движения и недопущении превышающих нормативы интервалы прибытия ТС в ОП, также с возможностью переключения, выполняемого в блоке (4.5) переключения между режимами управления движением ТС, и передачи режимов управления на входы блока (5) и блока (6) управления движением ТС в соответствии с ГД, блок (5) выполнен с возможностью для построения ГД на основании принятого в блоке (4) решения и состояния объектов ГРТС, блок (6) выполнен с возможностью управления временем хода ТС в соответствии с принятым в блоке (4) решением и ГД, блок (7) управления тяговым приводом ТС выполнен с возможностью передачи управляющих воздействий на тяговый привод, при этом присутствуют следующие однонаправленные связи между блоками: блок (1) соединен с блоком (2), блок (2) через блок сравнения (4.1) соединен с блоком (4), блок сравнения (4.1) соединен с блоками управления (4.2), (4.3), (4.4), блок (3) через блок сравнения (4.1) соединен с блоком (4), блок (4) через блок переключения (4.5) соединен с блоками (5) и (6), блок (5) соединен с блоками (1) и (2), блок (6) соединен с блоком (7), блок (7) соединен с блоком (3).
| Интеллектуальный комплекс управления перевозочным процессом городской рельсовой транспортной системы (ГРТС) | 2022 |
|
RU2791353C1 |
| УНИВЕРСАЛЬНЫЙ ТРАНСПОРТНО-ЛОГИСТИЧЕСКИЙ КОМПЛЕКС Шумовского | 2017 |
|
RU2655589C1 |
| Устройство для автоведения поездов метрополитена | 1977 |
|
SU768686A1 |
| US 5799263 A, 25.08.1998. | |||

