[0001] В настоящей заявке испрашивается приоритет по заявке на патент Китая № 202210966259.6, озаглавленной "TORQUE CONTROL METHOD, APPARATUS AND SYSTEM", поданной в Национальное управление интеллектуальной собственности Китая 12 августа 2022 года, полное раскрытие которой включено сюда путем ссылки.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0002] Настоящая заявка относится к области управления, а, в частности, к способу, устройству и системе управления крутящим моментом.
УРОВЕНЬ ТЕХНИКИ
[0003] Во время вождения транспортного средства, водитель управляет степенью нажатия педали акселератора транспортного средства для того, чтобы изменять выходной крутящий момент двигателя таким образом, что крутящий момент в зависимости от мощности транспортного средства удовлетворяет фактическим требованиям по вождению. В настоящее время, взаимосвязь между степенью нажатия педали акселератора и выходным крутящим моментом двигателя устанавливается на основе предварительно откалиброванной таблицы параметров.
[0004] Когда степень нажатия педали акселератора варьируется, система управления двигателем извлекает предварительно установленный выходной крутящий момент двигателя в соответствии с текущей степенью нажатия педали акселератора из предварительно установленной таблицы параметров и затем управляет двигателем таким образом, чтобы выходной крутящий момент двигателя достиг предварительно установленного значения.
[0005] Тем не менее, в случае если выходной крутящий момент двигателя управляется согласно предварительным откалиброванным параметрам, взаимосвязь между степенью нажатия педали акселератора и выходным крутящим моментом двигателя определяется заранее. Во время процесса управления, двигатель жестко откликается только на варьирование степени нажатия педали акселератора и изменяет выходной крутящий момент двигателя согласно результатам калибровки. Следовательно, он не может удовлетворять требованиям по мощности транспортного средства при различных сценариях вождения, нагрузках транспортного средства и стилях вождения водителей.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0006] Согласно настоящему изобретению, предоставляются способ, устройство и система управления крутящим моментом, которые позволяют достигать гибкого управления крутящим моментом.
[0007] В первом аспекте, согласно варианту осуществления настоящего изобретения, предлагается способ управления крутящим моментом, включающий в себя:
получение выходного крутящего момента двигателя и целевого выходного крутящего момента двигателя и определение разности между выходным крутящим моментом двигателя и целевым выходным крутящим моментом двигателя;
получение режима вождения транспортного средства и определение коэффициента отклика на величину управления педалью на основе разности и режима вождения; и
регулирование процесса управления выходным крутящим моментом двигателя на основе коэффициента отклика на величину управления педалью, с тем чтобы управлять выходным крутящим моментом двигателя таким образом, чтобы достигать требуемого крутящего момента.
[0008] При необходимости, этап получения целевого выходного крутящего момента двигателя включает в себя:
получение параметра управления педалью и скорости транспортного средства и определение целевой скорости транспортного средства на основе параметра управления педалью и скорости транспортного средства; и
получение параметра веса транспортного средства и параметра дороги и определение целевого выходного крутящего момента двигателя на основе целевой скорости транспортного средства, параметра веса транспортного средства и параметра дороги.
[0009] При необходимости, режим вождения включает в себя режим водителя; и в режиме водителя:
коэффициент отклика на величину управления педалью использует первый коэффициент, и первый коэффициент используется для управления выходным крутящим моментом двигателя таким образом, чтобы достигать первого требуемого крутящего момента.
[0010] При необходимости, режим вождения включает в себя мощностной режим; и в мощностном режиме:
в случае, если разность находится в первом диапазоне, коэффициент отклика на величину управления педалью использует второй коэффициент, и второй коэффициент используется для управления выходным крутящим моментом двигателя таким образом, чтобы достигать целевого выходного крутящего момента двигателя;
в случае, если разность находится во втором диапазоне, коэффициент отклика на величину управления педалью использует третий коэффициент, и третий коэффициент используется для управления выходным крутящим моментом двигателя таким образом, чтобы достигать первого требуемого крутящего момента; и
в случае, если разность находится в третьем диапазоне, коэффициент отклика на величину управления педалью использует четвертый коэффициент, и четвертый коэффициент используется для управления выходным крутящим моментом двигателя таким образом, чтобы достигать целевого выходного крутящего момента двигателя.
[0011] При необходимости, режим вождения включает в себя экономичный режим; и в экономичном режиме:
в случае, если разность находится в четвертом диапазоне, коэффициент отклика на величину управления педалью использует пятый коэффициент, и пятый коэффициент используется для управления выходным крутящим моментом двигателя таким образом, чтобы достигать целевого выходного крутящего момента двигателя;
в случае, если разность находится в пятом диапазоне, коэффициент отклика на величину управления педалью использует шестой коэффициент, и шестой коэффициент используется для управления выходным крутящим моментом двигателя таким образом, чтобы достигать целевого выходного крутящего момента двигателя; и
в случае, если разность находится в шестом диапазоне, коэффициент отклика на величину управления педалью использует седьмой коэффициент, и седьмой коэффициент используется для управления выходным крутящим моментом двигателя таким образом, чтобы достигать целевого выходного крутящего момента двигателя.
[0012] При необходимости, параметр управления педалью включает в себя параметр степени нажатия педали акселератора, параметр степени нажатия педали тормоза, параметр темпа изменения степени нажатия педали акселератора и параметр темпа изменения степени нажатия педали тормоза; и
этап определения целевой скорости транспортного средства на основе параметра управления педалью и скорости транспортного средства включает в себя:
получение целевой скорости транспортного средства через способ нечеткого управления посредством приема параметра управления педалью, скорости транспортного средства и ускорения транспортного средства в качестве вводов.
[0013] При необходимости, первое уравнение по методу наименьших квадратов устанавливается на основе интегрального уравнения кинетической энергии, и параметр веса транспортного средства определяется через первое уравнение по методу наименьших квадратов; и
второе уравнение по методу наименьших квадратов устанавливается на основе формулы разности скоростей, и параметр дороги определяется через второе уравнение по методу наименьших квадратов.
[0014] При необходимости, интегральное уравнение кинетической энергии является следующим:

 ,
,
и формула разности скоростей является следующей:
 ,
,
где m представляет параметр веса транспортного средства, θ представляет параметр дороги, v представляет скорость транспортного средства, t представляет время, μ является механической эффективностью двигателя, T является выходным крутящим моментом двигателя, i0 является передаточным отношением трансмиссии конечного редукторного привода транспортного средства, ig является передаточным отношением транспортного средства, r является радиусом колеса, A является наветренной площадью транспортного средства, Cd является коэффициентом сопротивления воздуха транспортного средства, g является гравитационным ускорением, и f является коэффициентом сопротивления крену транспортного средства.
[0015] Во втором аспекте, согласно другому варианту осуществления настоящего изобретения, предлагается устройство управления крутящим моментом, включающее в себя модуль управления крутящим моментом, причем модуль управления крутящим моментом выполнен с возможностью:
получения выходного крутящего момента двигателя и целевого выходного крутящего момента двигателя и определения разности между выходным крутящим моментом двигателя и целевым выходным крутящим моментом двигателя;
получения режима вождения транспортного средства и определения коэффициента отклика на величину управления педалью на основе разности и режима вождения; и
регулирования процесса управления выходным крутящим моментом двигателя посредством использования коэффициента отклика на величину управления педалью, с тем чтобы управлять выходным крутящим моментом двигателя таким образом, чтобы достигать требуемого крутящего момента.
[0016] В третьем аспекте, согласно еще одному другому варианту осуществления настоящего изобретения, предлагается система управления крутящим моментом. Система включает в себя контроллер, причем контроллер содержит исполняемую компьютером программу, и исполняемая компьютером программа выполнена с возможностью работы для осуществления способа управления крутящим моментом, описанного в вариантах осуществления настоящего изобретения.
[0017] При использовании способа управления крутящим моментом, предложенного согласно настоящему изобретению, коэффициент отклика на величину управления педалью определяется на основе режима вождения транспортного средства и разности между выходным крутящим моментом двигателя и целевым выходным крутящим моментом двигателя, чтобы регулировать процесс управления выходным крутящим моментом двигателя на основе коэффициента отклика на величину управления педалью, с тем чтобы управлять выходным крутящим моментом двигателя таким образом, чтобы достигать требуемого крутящего момента. Процесс управления выходным крутящим моментом двигателя регулируется на основе коэффициента отклика на величину управления педалью таким образом, что выходной крутящий момент двигателя динамически связывается с режимом вождения и целевым выходным крутящим моментом двигателя. Следовательно, взаимосвязь между выходным крутящим моментом двигателя и величиной управления педалью более не ограничена посредством фиксированной предварительно откалиброванной таблицы параметров, за счет этого оптимизируя экономичность и выбросы транспортного средства.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
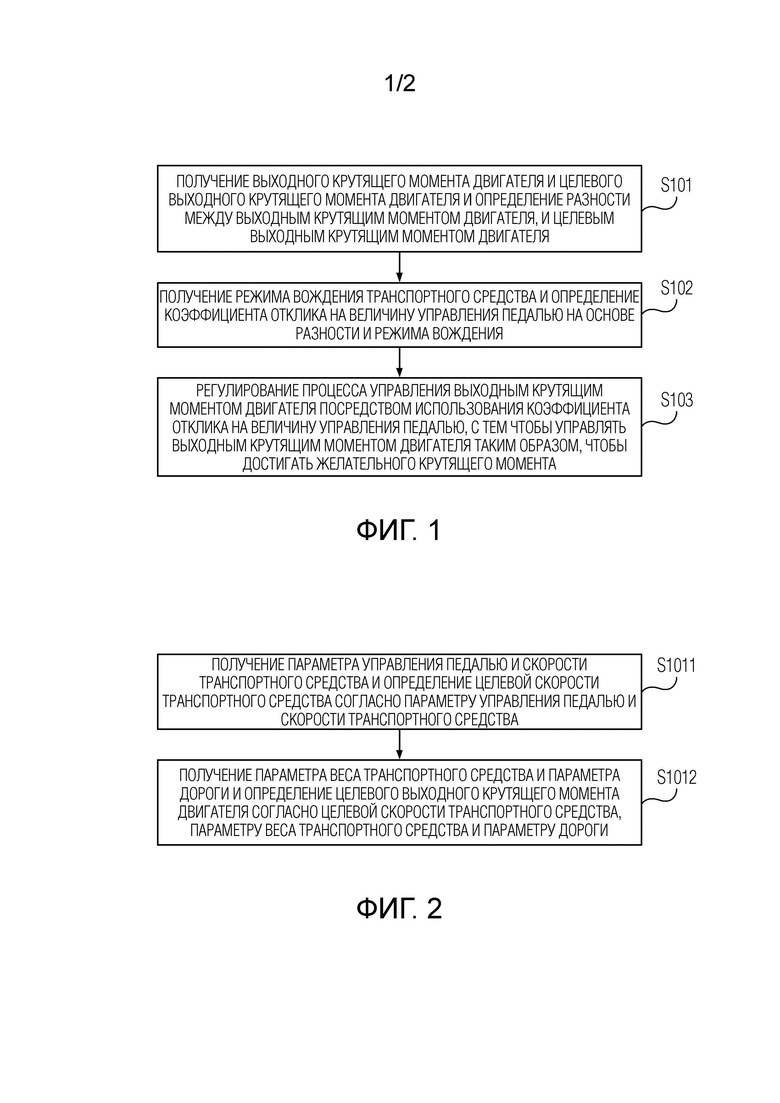
[0018] Фиг. 1 является блок-схемой последовательности операций способа управления крутящим моментом согласно варианту осуществления;
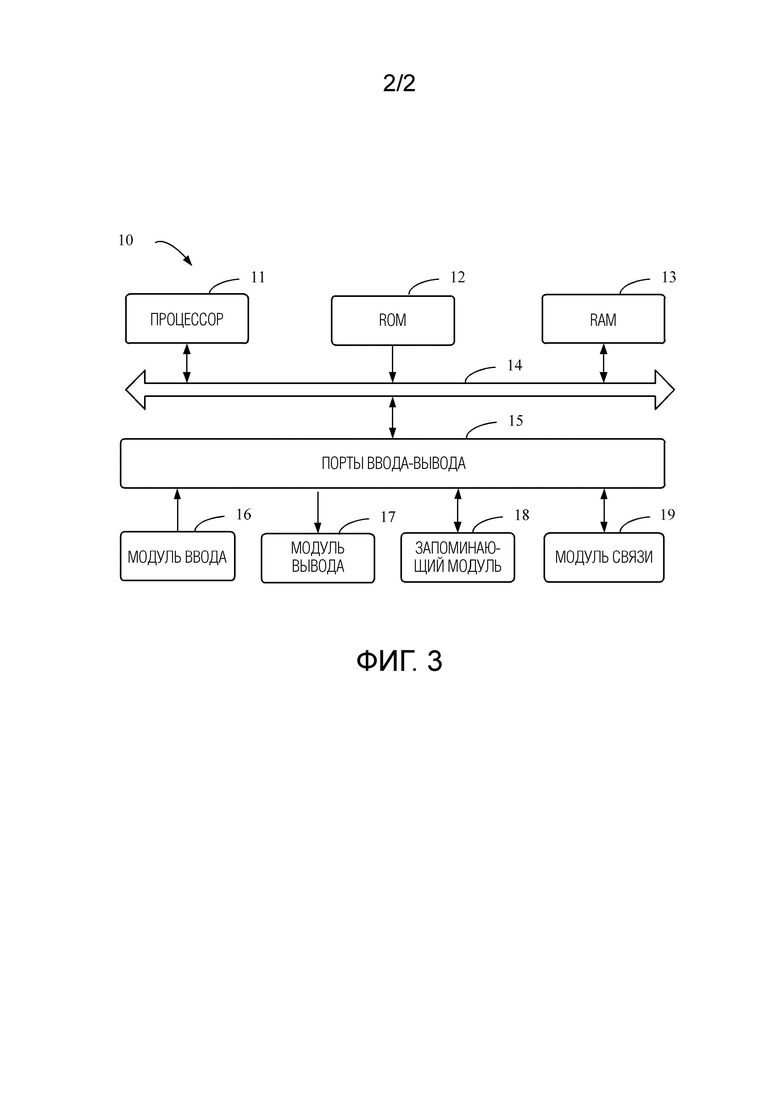
[0019] Фиг. 2 является блок-схемой последовательности операций способа для определения целевого выходного крутящего момента двигателя согласно варианту осуществления; и
[0020] Фиг. 3 является схематичным видом электронного устройства согласно варианту осуществления.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0021] Следует отметить, что на чертежах показаны некоторые конструкции, связанные с настоящим изобретением, а не все конструкции, с тем чтобы упростить описание.
Первый вариант осуществления
[0022] Фиг. 1 является блок-схемой последовательности операций способа управления крутящим моментом согласно варианту осуществления. Ссылаясь на фиг. 1, способ включает в себя следующие этапы.
[0023] На этапе S101, выходной крутящий момент двигателя и целевой выходной крутящий момент двигателя получаются, и разность между выходным крутящим моментом двигателя, и целевым выходным крутящим моментом двигателя определяется.
[0024] В качестве примера, в настоящем варианте осуществления, выходной крутящий момент двигателя означает выходной крутящий момент двигателя в текущий момент времени, и целевой выходной крутящий момент двигателя означает целевой выходной крутящий момент двигателя.
[0025] В качестве примера, в настоящем варианте осуществления, целевая скорость транспортного средства после указанного периода времени прогнозируется, и целевой выходной крутящий момент двигателя определяется согласно целевой скорости транспортного средства.
[0026] В качестве примера, в реализации, целевая скорость транспортного средства определяется следующим образом:
скорость транспортного средства в текущий момент времени и величина управления педали (например, степень нажатия педали или темп изменения степени нажатия педали) транспортного средства получаются, и целевая скорость транспортного средства определяется на основе скорости транспортного средства и величины управления.
[0027] В качестве примера, в реализации, взаимосвязь на основе ассоциирования между скоростью транспортного средства, величиной управления и целевой скоростью транспортного средства определяется посредством калибровочного эксперимента.
[0028] В качестве примера, в реализации, взаимосвязь на основе ассоциирования между целевой скоростью транспортного средства и целевым выходным крутящим моментом двигателя определяется посредством калибровочного эксперимента.
[0029] В настоящем варианте осуществления, после того, как выходной крутящий момент двигателя и целевой выходной крутящий момент двигателя определяются, разность между выходным крутящим моментом двигателя и целевым выходным крутящим моментом двигателя вычисляется.
[0030] На этапе S102, режим вождения транспортного средства получается, и коэффициент отклика на величину управления педалью определяется на основе разности и режима вождения.
[0031] В качестве примера, в настоящем варианте осуществления, транспортное средство может иметь несколько режимов вождения, и транспортное средство содержит различные условия в виде предельных значений для управления крутящим моментом двигателя в соответствии с различными режимами вождения.
[0032] Например, режим вождения может представлять собой мощностной режим, экономичный режим и т.п. В мощностном режиме, условие в виде предельных значений для управления крутящим моментом двигателя может отдавать приоритет требованию по мощности транспортного средства. В экономичном режиме, условие в виде предельных значений для управления крутящим моментом двигателя может отдавать приоритет экономии топлива транспортного средства.
[0033] В качестве примера, в настоящем варианте осуществления, взаимосвязь на основе ассоциирования между разностью, режимом вождения и коэффициентом отклика на величину управления педалью определяется посредством калибровочного эксперимента.
[0034] На этапе S103, процесс управления выходным крутящим моментом двигателя регулируется согласно коэффициенту отклика на величину управления педалью, с тем чтобы управлять выходным крутящим моментом двигателя таким образом, чтобы достигать требуемого крутящего момента.
[0035] В качестве примера, в настоящем варианте осуществления, коэффициент отклика на величину управления педалью представляет чувствительность отклика контроллера крутящего момента (выполненного с возможностью вычислять выходной крутящий момент двигателя) на величину управления педали.
[0036] В случае если величина управления педалью является идентичной, и разная чувствительность отклика используется, этап регулирования процесса управления выходным крутящим моментом двигателя посредством использования коэффициента отклика на величину управления педалью может регулировать правило, используемое во время формирования выходного крутящего момента двигателя, через вычисление посредством контроллера крутящего момента или регулирование параметра вычисления во время формирования выходного крутящего момента двигателя посредством вычисления и т.п.
[0037] Соответственно, в случаях, в которых величина управления педалью является идентичной, и разная чувствительность отклика используется, значение выходного крутящего момента, сформированного посредством вычисления посредством контроллера крутящего момента, может отличаться, и темп изменения выходного крутящего момента также может отличаться.
[0038] В качестве примера, в настоящем варианте осуществления, требуемый крутящий момент представляет крутящий момент, который двигатель должен выводить в текущем периоде вычисления.
[0039] В качестве примера, в настоящем варианте осуществления, когда выходной крутящий момент двигателя представляет собой требуемый крутящий момент, требование в отношении управления в указанном режиме вождения и требование в отношении управления водителя, когда текущий режим вождения изменяется на требуемый режим вождения в текущем рабочем состоянии, удовлетворяются одновременно.
[0040] При использовании способа управления крутящим моментом, предложенного согласно настоящему варианту осуществления, коэффициент отклика на величину управления педалью определяется на основе режима вождения транспортного средства и разности между выходным крутящим моментом двигателя и целевым выходным крутящим моментом двигателя, чтобы регулировать процесс управления выходным крутящим моментом двигателя на основе коэффициента отклика на величину управления педалью, с тем чтобы управлять выходным крутящим моментом двигателя таким образом, чтобы достигать требуемого крутящего момента. Процесс управления выходным крутящим моментом двигателя регулируется на основе коэффициента отклика на величину управления педалью таким образом, что выходной крутящий момент двигателя динамически связывается с режимом вождения и целевым выходным крутящим моментом двигателя. Следовательно, взаимосвязь между выходным крутящим моментом двигателя и величиной управления педалью более не ограничена посредством фиксированной предварительно откалиброванной таблицы параметров, за счет этого оптимизируя экономичность и выбросы транспортного средства (например, во время фактического вождения, этот способ предотвращает проблемы увеличенного числа рабочих состояний в неустановившемся режиме двигателя, ухудшенной экономии топлива транспортным средством и повышенных выбросов транспортного средства вследствие увеличения недостоверных откликов двигателя, вызываемых посредством частого изменения выходного крутящего момента двигателя вследствие бессознательных операций водителя).
[0041] Фиг. 2 является блок-схемой последовательности операций способа для определения целевого выходного крутящего момента двигателя согласно варианту осуществления. Ссылаясь на фиг. 2, в реализации, на основе описания этапа S101, целевой выходной крутящий момент двигателя определяется через следующие этапы.
[0042] На этапе S1011, параметр управления педалью и скорость транспортного средства получаются, и целевая скорость транспортного средства определяется на основе параметра управления педалью и скорости транспортного средства.
[0043] В качестве примера, в настоящем решении, параметр управления педалью может включать в себя параметр степени нажатия педали акселератора, параметр темпа изменения степени нажатия педали акселератора, параметр степени нажатия педали тормоза, параметр темпа изменения степени нажатия педали тормоза и т.п.
[0044] В качестве примера, в настоящем решении, целевая скорость транспортного средства определяется через модель прогнозирования требуемой водителем скорости. Например, когда параметр темпа изменения степени нажатия педали акселератора принимается в качестве параметра управления педалью, модель прогнозирования требуемой водителем скорости конструируется следующим образом.
[0045] Таблица правил нечеткого управления для целевой скорости транспортного средства конструируется, и таблица правил нечеткого управления для целевой скорости транспортного средства принимается в качестве модели прогнозирования требуемой водителем скорости.
[0046] В качестве примера, в настоящем решении, таблица правил нечеткого управления для целевой скорости транспортного средства показывается в таблице 1.
Табл. 1
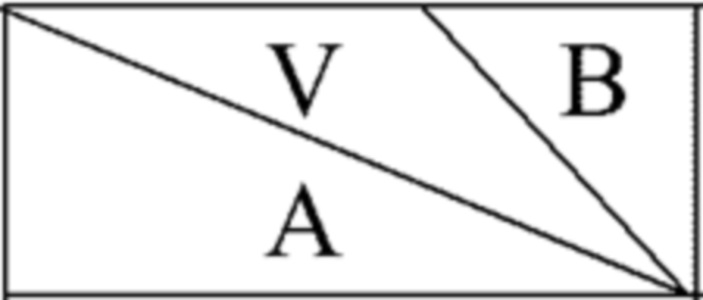
[0047] В таблице 1, V представляет целевую скорость транспортного средства, A представляет ускорение транспортного средства, B представляет темп изменения степени нажатия педали акселератора, и NB, NS, ZO, PS и PB, соответственно, представляют пять состояний диапазона A и B.
[0048] В качестве примера, в настоящем решении, A и B может иметь больше состояний диапазона согласно конструктивным потребностям, и конкретное число состояний диапазона не ограничено.
[0049] В качестве примера, в настоящем решении, согласно различным рабочим состояниям транспортного средства, конструируются несколько таблиц правил нечеткого управления для целевой скорости транспортного средства, как показано в таблице 1. Каждая из таблиц правил нечеткого управления используется для определения целевой скорости транспортного средства в соответствии с ускорением транспортного средства и темпом изменения степени нажатия педали акселератора согласно соответствующему одному из различных рабочих состояний.
[0050] В качестве примера, в настоящем решении, рабочие состояния включают в себя пять рабочих состояний, а именно, состояние вождения в заторе, состояние вождения на низкой скорости, состояние вождения на средней скорости, состояние обгона на средней скорости и состояние вождения на высокой скорости.
[0051] В качестве примера, в настоящем решении, данные поведения при вождении водителя в соответствии с различными рабочими состояниями в экспериментальных или фактических сценариях вождения получаются;
элементы характеристик (скорость транспортного средства, ускорение транспортного средства, темп изменения степени нажатия педали акселератора, отношение ускорения транспортного средства к целевой скорости транспортного средства и отношение темпа изменения степени нажатия педали акселератора к целевой скорости транспортного средства) в данных поведения при вождении извлекаются; и
согласно вышеуказанным элементам характеристик, нечеткий набор и нечеткая область определяются, функция принадлежности вычисляется, и затем таблица правил нечеткого управления для целевой скорости транспортного средства формируется.
[0052] В качестве примера, в настоящем решении, таблица правил нечеткого управления для целевой скорости транспортного средства формируется через общий способ для формирования таблицы нечеткого управления в предшествующем уровне техники, и конкретный процесс для него подробно не описывается.
[0053] На основе вышеприведенного описания, в настоящем решении, целевая скорость транспортного средства получается через способ нечеткого управления посредством приема параметра управления педалью и скорости транспортного средства или ускорения транспортного средства в качестве вводов.
[0054] В частности, темп изменения степени нажатия педали акселератора и ускорение транспортного средства принимается в качестве вводов. После того, как величина нечеткого управления целевой скорости транспортного средства определяется на основе таблицы правил нечеткого управления для целевой скорости транспортного средства, значение целевой скорости транспортного средства определяется через способ предотвращения нечеткости.
[0055] В качестве примера, когда параметр степени нажатия педали акселератора или параметр степени нажатия педали тормоза, или параметр темпа изменения степени нажатия педали тормоза принимается в качестве параметра управления педалью, модель прогнозирования требуемой водителем скорости конструируется посредством идентичного процесса с моделью прогнозирования, когда параметр темпа изменения степени нажатия педали акселератора принимается в качестве параметра управления педалью, при этом:
B представляет степень нажатия педали акселератора или степень нажатия педали тормоза, или темп изменения степени нажатия педали тормоза в соответствии с параметром управления педалью; и
элементы характеристик, извлекаемые из данных поведения при вождении, включают в себя степень нажатия педали акселератора или степень нажатия педали тормоза, или темп изменения степени нажатия педали тормоза в соответствии с параметром управления педалью и отношение степени нажатия педали акселератора или степени нажатия педали тормоза, или темпа изменения степени нажатия педали тормоза к целевой скорости транспортного средства.
[0056] В качестве примера, в реализации, целевое ускорение может определяться через нечеткое управление. В частности, целевое ускорение определяется через модель прогнозирования требуемого водителем ускорения.
[0057] В качестве примера, в настоящем решении, параметр управления педалью и скорость транспортного средства получаются, и целевое ускорение определяется на основе параметра управления педалью и скорости транспортного средства.
[0058] В качестве примера, в настоящем решении, параметр управления педалью может включать в себя параметр степени нажатия педали акселератора, параметр темпа изменения степени нажатия педали акселератора, параметр степени нажатия педали тормоза, параметр темпа изменения степени нажатия педали тормоза и т.п.
[0059] В качестве примера, модель прогнозирования требуемого водителем ускорения конструируется посредством идентичного процесса с вышеуказанной моделью прогнозирования требуемой водителем скорости; причем:
в ходе конструирования таблицы правил нечеткого управления целевого ускорения, V заменяется посредством Va, Va представляет целевое ускорение, A представляет ускорение транспортного средства, и B представляет темп изменения степени нажатия педали акселератора; и
в случае, если параметр управления педалью включает в себя параметр степени нажатия педали акселератора, и параметр темпа изменения степени нажатия педали акселератора рассматривается в качестве примера, элементы характеристик, извлекаемые из данных поведения при вождении, включают в себя скорость транспортного средства, ускорение транспортного средства, степень нажатия педали акселератора, темп изменения степени нажатия педали акселератора, отношение степени нажатия педали акселератора к целевому ускорению и отношение темпа изменения степени нажатия педали акселератора к целевому ускорению.
[0060] На этапе S1012, параметр веса транспортного средства и параметр дороги получаются, и целевой выходной крутящий момент двигателя определяется на основе целевой скорости транспортного средства, параметра веса транспортного средства и параметра дороги.
[0061] В качестве примера, в настоящем решении, целевой выходной крутящий момент двигателя определяется через модель продольной динамики транспортного средства, которая может использовать любую из моделей продольной динамики транспортного средства в предшествующем уровне техники, которая включает в себя параметр веса транспортного средства, параметр дороги и параметр скорости транспортного средства.
[0062] В качестве примера, в настоящем решении, параметр дороги включает в себя уклон дороги, коэффициент сопротивления крену, наветренную площадь, коэффициент сопротивления воздуха и т.п.
[0063] В качестве примера, в настоящем решении, параметр веса транспортного средства и уклон дороги параметра дороги могут получаться посредством прямых измерений.
[0064] В качестве примера, в реализации, параметр веса транспортного средства может определяться следующим образом.
[0065] Первое уравнение по методу наименьших квадратов устанавливается на основе интегрального уравнения кинетической энергии, и параметр веса транспортного средства определяется через первое уравнение по методу наименьших квадратов.
[0066] В качестве примера, в настоящем решении, интегральное уравнение кинетической энергии является следующим:
,
где m представляет параметр веса транспортного средства, θ представляет параметр дороги (уклон дороги), v представляет скорость транспортного средства, t представляет время, μ является механической эффективностью двигателя, T является выходным крутящим моментом двигателя, i0 является передаточным отношением трансмиссии конечного редукторного привода, ig является передаточным отношением транспортного средства, r является радиусом колеса, A является наветренной площадью транспортного средства, Cd является коэффициентом сопротивления воздуха транспортного средства, g является гравитационным ускорением, и f является коэффициентом сопротивления крену транспортного средства.
[0067] В качестве примера, посредством использования вышеуказанного интегрального уравнения кинетической энергии, первое уравнение по методу наименьших квадратов может устанавливаться следующим образом:


где ym представляет вес транспортного средства, и ν1~ν10 представляют собой коэффициенты уравнения. Конкретные значения ϕB могут вычисляться на основе нескольких наборов данных измерений (которые могут включать в себя, например, y1~yk и ϕA1~ϕAk) посредством использования метода наименьших квадратов.
[0068] В качестве примера, в настоящем решении, когда данные измерений обновляются, значения ϕB могут обновляться с использованием рекурсивного метода наименьших квадратов или рекурсивного метода наименьших квадратов с коэффициентами отсутствия последействия.
[0069] В качестве примера, в настоящем решении, при получении данных измерений, ϕA и θ могут определяться посредством измерений, и m может определяться посредством вычисления через интегральное уравнение кинетической энергии.
[0070] В качестве примера, в реализации, уклон дороги параметра дороги может определяться следующим образом.
[0071] Второе уравнение по методу наименьших квадратов устанавливается на основе формулы разности скоростей, и параметр дороги определяется через второе уравнение по методу наименьших квадратов.
[0072] В качестве примера, в настоящем решении, формула разности скоростей является следующей:
,
где m представляет параметр веса транспортного средства, θ представляет параметр дороги (уклон дороги), v представляет скорость транспортного средства, t представляет время, μ является механической эффективностью двигателя, T является выходным крутящим моментом двигателя, i0 является передаточным отношением трансмиссии конечного редукторного привода, ig является передаточным отношением транспортного средства, r является радиусом колеса, A является наветренной площадью транспортного средства, Cd является коэффициентом сопротивления воздуха транспортного средства, g является гравитационным ускорением, и f является коэффициентом сопротивления крену транспортного средства.
[0073] В качестве примера, посредством использования вышеуказанной формулы разности скоростей, второе уравнение по методу наименьших квадратов может устанавливаться следующим образом:

где, yθ представляет уклон дороги, и ν11~ν20 представляют собой коэффициенты уравнения. Конкретные значения ϕC могут вычисляться с использованием метода наименьших квадратов из нескольких наборов данных измерений (которые могут включать в себя, например, y1~yk и ϕA1~ϕAk).
[0074] В качестве примера, в настоящем решении, когда данные измерений обновляются, значения ϕC могут обновляться с использованием рекурсивного метода наименьших квадратов.
[0075] В качестве примера, в настоящем решении, при получении данных измерений, ϕA и m могут определяться посредством измерений, и θ может определяться посредством вычисления через формулу разности скоростей.
[0076] В качестве примера, в настоящем решении, первое уравнение по методу наименьших квадратов устанавливается через интегральное уравнение кинетической энергии, и второе уравнение по методу наименьших квадратов устанавливается через формулу разности скоростей. Параметр веса транспортного средства получается посредством решения первого уравнения по методу наименьших квадратов вне зависимости от параметра дороги, и параметр дороги получается посредством решения второго уравнения по методу наименьших квадратов вне зависимости от параметра веса транспортного средства. Таким образом, два параметра не связаны между собой, в силу чего вычисления двух параметров упрощаются.
[0077] В качестве примера, в реализации, параметр дороги (уклон дороги) может определяться через уравнение фильтра Калмана.
[0078] В качестве примера, в настоящем решении, уравнение фильтра Калмана устанавливается согласно конструктивным требованиям. Измерительный сигнал датчика уклона принимается в качестве значения измерения и вводится в уравнение фильтра Калмана, и результат вывода уравнения фильтра Калмана принимается в качестве оцененного значения параметра дороги.
[0079] В качестве примера, на основе описания этапа S1011, если целевая скорость транспортного средства и целевое ускорение определяются согласно параметру управления педалью и скорости транспортного средства, то на этом этапе, целевой выходной крутящий момент двигателя может определяться согласно целевой скорости транспортного средства, целевому ускорению, параметру веса транспортного средства и параметру дороги.
[0080] В качестве примера, на основе описания этапа S103, в реализации, режим вождения включает в себя режим водителя.
[0081] В качестве примера, в настоящем решении, в режиме водителя, коэффициент отклика на величину управления педалью использует первый коэффициент, и первый коэффициент используется для управления выходным крутящим моментом двигателя таким образом, чтобы достигать первого требуемого крутящего момента.
[0082] В качестве примера, в настоящем решении, коэффициент отклика на величину управления педалью использует первый коэффициент. В этом случае, выходной крутящий момент двигателя определяется на основе первого правила, причем первое правило является следующим:
получение параметра величины управления педалью (параметра степени нажатия педали акселератора или параметра степени нажатия педали тормоза) и определение выходного крутящего момента двигателя, т.е. первого требуемого крутящего момента, согласно взаимосвязи на основе калибровки между параметром величины управления педалью и выходным крутящим моментом двигателя.
[0083] В качестве примера, в настоящем решении, первый требуемый крутящий момент только связан со степенью нажатия педали и не связан с разностью между выходным крутящим моментом двигателя и целевым выходным крутящим моментом двигателя. Иными словами, во время процесса управления выходным крутящим моментом двигателя, вышеуказанная разность вообще не затрагивает результат вычисления выходного крутящего момента двигателя.
[0084] В качестве примера, на основе описания этапа S103, в реализации, режим вождения включает в себя мощностной режим.
[0085] В качестве примера, в настоящем решении, результат вычисления требуемого крутящего момента связан с разностью между выходным крутящим моментом двигателя и целевым выходным крутящим моментом двигателя, и выходной крутящий момент двигателя определяется на основе различных правил при различных значениях вышеуказанной разности. В частности, процесс управления выходным крутящим моментом двигателя включает в себя:
в случае, если разность находится в первом диапазоне, коэффициент отклика на величину управления педалью использует второй коэффициент, и второй коэффициент используется для управления выходным крутящим моментом двигателя таким образом, чтобы достигать целевого выходного крутящего момента двигателя;
в случае, если разность находится во втором диапазоне, коэффициент отклика на величину управления педалью использует третий коэффициент, и третий коэффициент используется для управления выходным крутящим моментом двигателя таким образом, чтобы достигать первого требуемого крутящего момента; и
в случае, если разность находится в третьем диапазоне, коэффициент отклика на величину управления педалью использует четвертый коэффициент, и четвертый коэффициент используется для управления выходным крутящим моментом двигателя таким образом, чтобы достигать целевого выходного крутящего момента двигателя.
[0086] В качестве примера, в настоящем решении, в случае если разность находится в первом диапазоне, выходной крутящий момент двигателя больше целевого выходного крутящего момента двигателя, и абсолютное значение разности больше первого предварительно установленного порогового значения;
когда коэффициент отклика на величину управления педалью использует второй коэффициент, контроллер крутящего момента выполнен с возможностью снижать интенсивность отклика на варьирование степени нажатия педали (т.е. выходной крутящий момент двигателя должен достигать целевого выходного крутящего момента двигателя более медленно) и увеличивать чувствительность отклика на варьирование степени нажатия педали (т.е. повторное вычисление целевого выходного крутящего момента двигателя требуется при меньшем варьировании степени нажатия педали); и
контроллер крутящего момента выполнен с возможностью использовать способ управления с обратной связью, в котором целевой выходной крутящий момент двигателя принимается в качестве целевого крутящего момента, и выходной крутящий момент двигателя принимается в качестве ввода, с тем чтобы реализовывать процесс управления выходным крутящим моментом двигателя.
[0087] В качестве примера, в настоящем решении, в случае если разность находится во втором диапазоне, выходной крутящий момент двигателя больше целевого выходного крутящего момента двигателя, и абсолютное значение разности меньше первого предварительно установленного порогового значения;
когда коэффициент отклика на величину управления педалью использует третий коэффициент, контроллер крутящего момента выполнен с возможностью определять выходной крутящий момент двигателя на основе первого правила, причем первое правило является следующим:
получение параметра величины управления педалью (параметра степени нажатия педали акселератора или параметра степени нажатия педали тормоза) и определение выходного крутящего момента двигателя, т.е. первого требуемого крутящего момента, на основе взаимосвязи на основе калибровки между параметром величины управления педалью и выходным крутящим моментом двигателя.
[0088] В качестве примера, в настоящем решении, в случае если разность находится в третьем диапазоне, выходной крутящий момент двигателя меньше целевого выходного крутящего момента двигателя;
когда коэффициент отклика на величину управления педалью использует третий коэффициент, контроллер крутящего момента выполнен с возможностью увеличивать интенсивность отклика на варьирование степени нажатия педали (т.е. выходной крутящий момент двигателя должен достигать целевого выходного крутящего момента двигателя быстрее) и увеличивать чувствительность отклика на варьирование степени нажатия педали (т.е. повторное вычисление целевого выходного крутящего момента двигателя требуется при меньшем варьировании степени нажатия педали); и
контроллер крутящего момента выполнен с возможностью использовать способ управления с обратной связью, в котором целевой выходной крутящий момент двигателя принимается в качестве целевого крутящего момента, и выходной крутящий момент двигателя принимается в качестве ввода, с тем чтобы реализовывать процесс управления выходным крутящим моментом двигателя.
[0089] В качестве примера, на основе вышеуказанного контента, в настоящем решении, требуемый крутящий момент представляет собой первый требуемый крутящий момент или целевой выходной крутящий момент двигателя.
[0090] В качестве примера, на основе описания этапа S103, в реализации, режим вождения включает в себя экономичный режим.
[0091] В качестве примера, в настоящем решении, результат вычисления требуемого крутящего момента связан с разностью между выходным крутящим моментом двигателя и целевым выходным крутящим моментом двигателя, и выходной крутящий момент двигателя определяется на основе различных правил при различных значениях вышеуказанной разности. В частности, процесс управления выходным крутящим моментом двигателя включает в себя:
в случае, если разность находится в четвертом диапазоне, коэффициент отклика на величину управления педалью использует пятый коэффициент, и пятый коэффициент используется для управления выходным крутящим моментом двигателя таким образом, чтобы достигать целевого выходного крутящего момента двигателя;
в случае, если разность находится в пятом диапазоне, коэффициент отклика на величину управления педалью использует шестой коэффициент, и шестой коэффициент используется для управления выходным крутящим моментом двигателя таким образом, чтобы достигать целевого выходного крутящего момента двигателя; и
в случае, если разность находится в шестом диапазоне, коэффициент отклика на величину управления педалью использует седьмой коэффициент, и седьмой коэффициент используется для управления выходным крутящим моментом двигателя таким образом, чтобы достигать целевого выходного крутящего момента двигателя.
[0092] В качестве примера, в настоящем решении, в случае если разность находится в четвертом диапазоне, выходной крутящий момент двигателя больше целевого выходного крутящего момента двигателя, и абсолютное значение разности больше второго предварительно установленного порогового значения;
когда коэффициент отклика на величину управления педалью использует пятый коэффициент, контроллер крутящего момента выполнен с возможностью снижать интенсивность отклика на варьирование степени нажатия педали и увеличивать чувствительность отклика на варьирование степени нажатия педали; и
контроллер крутящего момента выполнен с возможностью использовать способ управления с обратной связью, в котором целевой выходной крутящий момент двигателя принимается в качестве целевого крутящего момента, и выходной крутящий момент двигателя принимается в качестве ввода, с тем чтобы реализовывать процесс управления выходным крутящим моментом двигателя.
[0093] В качестве примера, в настоящем решении, в случае если разность находится в пятом диапазоне, выходной крутящий момент двигателя меньше целевого выходного крутящего момента двигателя, и абсолютное значение разности больше третьего предварительно установленного порогового значения;
когда коэффициент отклика на величину управления педалью использует шестой коэффициент, контроллер крутящего момента выполнен с возможностью увеличивать интенсивность отклика на варьирование степени нажатия педали и увеличивать чувствительность отклика на варьирование степени нажатия педали; и
контроллер крутящего момента выполнен с возможностью использовать способ управления с обратной связью, в котором целевой выходной крутящий момент двигателя принимается в качестве целевого крутящего момента, и выходной крутящий момент двигателя принимается в качестве ввода, с тем чтобы реализовывать процесс управления выходным крутящим моментом двигателя.
[0094] В качестве примера, в настоящем решении, в случае если разность находится в шестом диапазоне, выходной крутящий момент двигателя находится близко к целевому выходному крутящему моменту двигателя, и абсолютное значение разности меньше четвертого предварительно установленного порогового значения;
когда коэффициент отклика на величину управления педалью использует седьмой коэффициент, контроллер крутящего момента выполнен с возможностью снижать интенсивность отклика на варьирование степени нажатия педали и снижать чувствительность отклика на варьирование степени нажатия педали; и
контроллер крутящего момента выполнен с возможностью использовать способ управления с обратной связью, в котором целевой выходной крутящий момент двигателя принимается в качестве целевого крутящего момента, и выходной крутящий момент двигателя принимается в качестве ввода, с тем чтобы реализовывать процесс управления выходным крутящим моментом двигателя.
[0095] В качестве примера, на основе вышеуказанного контента, в настоящем решении, требуемый крутящий момент представляет собой целевой выходной крутящий момент двигателя.
[0096] В качестве примера, в реализации, способ управления крутящим моментом может быть реализован следующим образом.
[0097] Информация рабочего состояния транспортного средства в текущий момент времени получается посредством ECU-системы и OBD-системы транспортного средства, включающая в себя частоту вращения двигателя, выходной крутящий момент двигателя, текущий передаточный механизм, скорость транспортного средства, степень нажатия педали акселератора, степень нажатия педали тормоза, сигнал датчика угла поворота руля и сигнал датчика уклона. Текущая позиция транспортного средства, текущая трехмерная GPS-скорость транспортного средства и текущая высота над уровнем моря дороги получаются посредством GPS-системы.
[0098] Передаточное отношение транспортного средства, передаточное отношение трансмиссии конечного редукторного привода, радиус колеса, наветренная площадь транспортного средства, масса при полной нагрузке транспортного средства, масса без нагрузки транспортного средства, коэффициент сопротивления воздуха транспортного средства и коэффициент сопротивления крену транспортного средства определяются из конструктивной информации транспортного средства.
[0099] Процесс фильтрации с ограничением по амплитуде выполняется для каждого из частоты вращения двигателя, выходного крутящего момента двигателя, текущего передаточного механизма, степени нажатия педали акселератора, степени нажатия педали тормоза, сигнала датчика угла поворота руля, сигнала датчика уклона и текущей трехмерной GPS-скорости транспортного средства таким образом, что иррациональный сигнал ошибки удаляется. После этого, каждый сигнал фильтруется посредством предварительно установленного фильтра нижних частот для того, чтобы удалять шум сигнала.
[0100] Скорость транспортного средства обрабатывается посредством разностного способа для того, чтобы вычислять ускорение транспортного средства. Степень нажатия педали акселератора обрабатывается посредством разностного способа для того, чтобы вычислять темп изменения степени нажатия педали акселератора. Сигнал степени нажатия педали тормоза обрабатывается посредством разностного способа для того, чтобы вычислять темп изменения степени нажатия педали тормоза. Текущее передаточное отношение трансмиссии умножается на передаточное отношение трансмиссии конечного редукторного привода для того, чтобы вычислять полное текущее передаточное отношение трансмиссии системы подачи мощности транспортного средства.
[0101] Скорость транспортного средства, ускорение транспортного средства и темп изменения степени нажатия педали акселератора (или темп изменения степени нажатия педали тормоза) после предварительной обработки данных принимаются в качестве вводов, и целевая скорость транспортного средства определяется посредством модели прогнозирования требуемой водителем скорости.
[0102] Скорость транспортного средства, механическая эффективность двигателя, выходной крутящий момент двигателя, передаточное отношение трансмиссии конечного редукторного привода, передаточное отношение транспортного средства, радиус колеса, наветренная площадь транспортного средства, коэффициент сопротивления воздуха, гравитационное ускорение и коэффициент сопротивления крену транспортного средства после предварительной обработки данных принимаются в качестве вводов, параметр веса транспортного средства определяется посредством первого уравнения по методу наименьших квадратов, и уклон дороги определяется посредством второго уравнения по методу наименьших квадратов.
[0103] Целевая скорость транспортного средства, параметр веса транспортного средства и параметр дороги принимаются в качестве вводов, и целевой выходной крутящий момент двигателя вычисляется через модель продольной динамики транспортного средства.
[0104] Когда транспортное средство находится в режиме водителя, коэффициент отклика на величину управления педалью использует первый коэффициент, и первый коэффициент используется для управления выходным крутящим моментом двигателя таким образом, чтобы достигать первого требуемого крутящего момента.
[0105] Когда транспортное средство находится в мощностном режиме, в случае если разность находится в первом диапазоне, коэффициент отклика на величину управления педалью использует второй коэффициент, и второй коэффициент используется для управления выходным крутящим моментом двигателя таким образом, чтобы достигать целевого выходного крутящего момента двигателя;
в случае, если разность находится во втором диапазоне, коэффициент отклика на величину управления педалью использует третий коэффициент, и третий коэффициент используется для управления выходным крутящим моментом двигателя таким образом, чтобы достигать первого требуемого крутящего момента; и
в случае, если разность находится в третьем диапазоне, коэффициент отклика на величину управления педалью использует четвертый коэффициент, и четвертый коэффициент используется для управления выходным крутящим моментом двигателя таким образом, чтобы достигать целевого выходного крутящего момента двигателя.
[0106] Когда транспортное средство находится в экономичном режиме, в случае если разность находится в четвертом диапазоне, коэффициент отклика на величину управления педалью использует пятый коэффициент, и пятый коэффициент используется для управления выходным крутящим моментом двигателя таким образом, чтобы достигать целевого выходного крутящего момента двигателя;
в случае, если разность находится в пятом диапазоне, коэффициент отклика на величину управления педалью использует шестой коэффициент, и шестой коэффициент используется для управления выходным крутящим моментом двигателя таким образом, чтобы достигать целевого выходного крутящего момента двигателя; и
в случае, если разность находится в шестом диапазоне, коэффициент отклика на величину управления педалью использует седьмой коэффициент, и седьмой коэффициент используется для управления выходным крутящим моментом двигателя таким образом, чтобы достигать целевого выходного крутящего момента двигателя.
Второй вариант осуществления
[0107] В настоящем варианте осуществления предлагается устройство управления крутящим моментом, включающее в себя модуль управления крутящим моментом, причем модуль управления крутящим моментом выполнен с возможностью:
получения выходного крутящего момента двигателя и целевого выходного крутящего момента двигателя и определения разности между выходным крутящим моментом двигателя и целевым выходным крутящим моментом двигателя;
получения режима вождения транспортного средства и определения коэффициента отклика на величину управления педалью на основе разности и режима вождения; и
регулирования процесса управления выходным крутящим моментом двигателя посредством использования коэффициента отклика на величину управления педалью, с тем чтобы управлять выходным крутящим моментом двигателя таким образом, чтобы достигать требуемого крутящего момента.
[0108] В качестве примера, в настоящем варианте осуществления, модуль управления крутящим моментом выполнен с возможностью осуществлять любой из способов управления крутящим моментом, описанных в первом варианте осуществления, и конкретный процесс для них подробно не описывается.
Третий вариант осуществления
[0109] В настоящем варианте осуществления предлагается система управления крутящим моментом, включающая в себя контроллер, причем контроллер содержит исполняемую компьютером программу, и исполняемая компьютером программа выполнена с возможностью работы для осуществления любого из способов управления крутящим моментом, описанных в первом варианте осуществления.
[0110] В качестве примера, способ управления крутящим моментом может сохраняться в электронном устройстве в форме исполняемой компьютером программы. Фиг. 3 является схематичным видом, показывающим конструкцию электронного устройства 10, которое может выполнять вариант осуществления настоящего изобретения. Ссылаясь на фиг. 3, электронное устройство имеет намерение представлять различные формы цифровых компьютеров, таких как переносной компьютер, настольный компьютер, рабочая станция, персональное цифровое устройство, сервер, лезвийный сервер, мэйнфрейм и другие соответствующие компьютеры. Электронное устройство также может представлять различные формы мобильных устройств, таких как персональный цифровой процессор, сотовый телефон, смартфон, носимое устройство (к примеру, шлем, очки, часы и т.п.) и другие аналогичные вычислительные устройства. Компоненты, проиллюстрированные в данном документе, соединения и взаимосвязи между ними и их функции рассматриваются только в качестве примеров и не имеют намерение ограничивать реализации настоящего изобретения, описанные и/или заявленные в формуле изобретения в данном документе.
[0111] Как показано на фиг. 3, электронное устройство 10 включает в себя, по меньшей мере, один процессор 11 и запоминающее устройство, поддерживающее связь, по меньшей мере, с одним процессором 11, такое как постоянное запоминающее устройство 12 (ROM) или оперативное запоминающее устройство 13 (RAM), при этом компьютерная программа, которая может выполняться, по меньшей мере, посредством одного процессора, сохраняется в запоминающем устройстве. Процессор 11 может выполнять различные надлежащие действия и процессы согласно компьютерной программе, сохраненной в постоянном запоминающем устройстве 12 (ROM), или компьютерной программе, загружаемой в оперативное запоминающее устройство 13 (RAM) из запоминающего модуля 18. RAM 13 также может сохранять различные программы и данные, требуемые посредством операций электронного устройства 10. Процессор 11, ROM 12 и RAM 13 соединяются между собой через шину 14. Порты 15 ввода-вывода также соединяются с шиной 14.
[0112] Несколько компонентов электронного устройства 10 соединяются с портами 15 ввода-вывода, включающих в себя модуль 16 ввода, такой как клавиатура или мышь; модуль 17 вывода, такой как различные типы дисплеев и динамиков; запоминающий модуль 18, такой как диск или оптический диск; и модуль 19 связи, такой как сетевой интерфейсный контроллер, модем, приемо-передающее устройство беспроводной связи и т.п. Модуль 19 связи обеспечивает возможность электронному устройству 10 обмениваться информацией с другими устройствами через компьютерную сеть, такую как Интернет и/или различные сети связи.
[0113] Процессор 11 может представлять собой различные узлы обработки специального назначения и/или общего назначения, имеющие обрабатывающие и вычислительные возможности. Некоторые примеры процессора 11 включают в себя, но не только, центральный процессор (CPU), графический процессор (GPU), различные указанные вычислительные микросхемы на основе искусственного интеллекта (AI), различные процессоры, выполняющие алгоритмы на основе модели машинного обучения, процессор цифровых сигналов (DSP) и любой соответствующий процессор, контроллер или микроконтроллер и т.д. Процессор 11 выполнен с возможностью выполнять различные способы и процессы, описанные выше, такие как способ управления крутящим моментом.
[0114] В некоторых вариантах осуществления, способ управления крутящим моментом может реализовываться как компьютерная программа, которая материально включается в машиночитаемый запоминающий носитель, такой как запоминающий модуль 18. В некоторых вариантах осуществления, часть или вся компьютерная программа может загружаться и/или устанавливаться на электронном устройстве 10 через ROM 12 и/или модуль 19 связи. Когда компьютерная программа загружается в RAM 13 и выполняется посредством процессора 11, один или более этапов вышеуказанного способа управления крутящим моментом могут выполняться. Альтернативно, в других вариантах осуществления, процессор 11 может быть выполнен с возможностью осуществлять способ управления крутящим моментом через любой другой соответствующий подход (например, посредством микропрограммного обеспечения).
[0115] Различные реализации систем и технологий, описанных выше, могут реализовываться в системе на цифровых электронных схемах, системе на интегральных схемах, программируемой пользователем вентильной матрице (FPGA), специализированной интегральной схеме (ASIC), специализированном стандартном продукте (ASSP), внутримикросхемной системе (SoC), комплексном программируемом логическом устройстве (CPLD), компьютерных аппаратных средствах, микропрограммном обеспечении, программном обеспечении и/или в комбинациях вышеозначенного. Различные реализации могут включать в себя: реализацию в одной или более компьютерных программах, при этом одна или более компьютерных программ могут выполняться и/или интерпретироваться на программируемой системе, включающей в себя, по меньшей мере, один программируемый процессор, и программируемый процессор может представлять собой программируемый процессор специального назначения или общего назначения, который может принимать данные и команды из системы хранения данных, по меньшей мере, одного устройства ввода и, по меньшей мере, одного устройства вывода и передавать данные и команды в систему хранения данных, по меньшей мере, одно устройство ввода и, по меньшей мере, одно устройство вывода.
[0116] Компьютерные программы, используемые для того, чтобы реализовывать способ настоящего изобретения, могут быть написаны на любой комбинации одного или более языков программирования. Эти компьютерные программы могут предоставляться в процессор компьютера общего назначения, компьютера специального назначения или других программируемых устройств обработки данных таким образом, что компьютерные программы, при выполнении посредством процессора или контроллера, выполняют функции/операции, указываемые на блок-схемах последовательности операций способа и/или на блок-схемах, которые должны реализовываться. Эти компьютерные программы могут выполняться полностью или частично на машине, частично на машине в качестве автономного программного пакета и частично на удаленной машине либо полностью на удаленной машине или сервере.
[0117] В контексте настоящего изобретения, машиночитаемый запоминающий носитель может представлять собой материальный носитель, который может включать в себя или сохранять компьютерную программу, которая должна использоваться посредством системы, оборудования или устройства выполнения команд либо в комбинации с системой, оборудованием или устройством выполнения команд. Машиночитаемый запоминающий носитель может включать в себя, но не только, электронную, магнитную, оптическую, электромагнитную, инфракрасную или полупроводниковую систему, оборудование или устройство либо любую соответствующую комбинацию вышеозначенного. Альтернативно, машиночитаемый запоминающий носитель может представлять собой машиночитаемую среду передачи сигналов. Более конкретные примеры машиночитаемого носителя хранения данных могут включать в себя электронное соединение на основе одной или более линий, портативный компьютерный диск, жесткий диск, оперативное запоминающее устройство (RAM), постоянное запоминающее устройство (ROM), стираемое программируемое постоянное запоминающее устройство (EPROM или флэш-память), оптическое волокно, портативное постоянное запоминающее устройство на компакт-дисках (CD-ROM), оптическое устройство хранения данных, магнитное устройство хранения данных либо любую соответствующую комбинацию вышеозначенного.
[0118] Чтобы предоставлять взаимодействию с пользователем, системы и технологии, описанные в данном документе, могут реализовываться на электронном устройстве, которое содержит устройство отображения (такое как монитор с CRT (электронно-лучевой трубкой) или с ЖК-дисплеем (жидкокристаллическим дисплеем)) для отображения информации пользователю, клавиатуру и указательное устройство (такое как мышь или шаровой манипулятор), через которое пользователь может предоставлять ввод в электронное устройство. Другие типы устройств также могут использоваться для того, чтобы предоставлять взаимодействию с пользователем. Например, обратная связь, предоставленная пользователю, может представлять собой любую форму сенсорной обратной связи (к примеру, визуальную обратную связь, акустическую обратную связь или тактильную обратную связь), и ввод от пользователя может приниматься в любой форме (включающей в себя акустический ввод, речевой ввод или тактильный ввод).
[0119] Системы и технологии, описанные в данном документе, могут реализовываться в вычислительной системе, включающей в себя фоновый компонент (такой как, сервер данных), или в вычислительной системе, включающей в себя промежуточный программный компонент (такой как сервер приложений), или в вычислительной системе, включающей в себя внешний интерфейсный компонент (такой как пользовательский компьютер, имеющий графический пользовательский интерфейс или веб-браузер, при этом пользователь имеет возможность взаимодействовать с реализациями систем и технологий, описанных в данном документе, через графический пользовательский интерфейс или веб-браузер), или в вычислительной системе, включающей в себя любую комбинацию такого фонового компонента, промежуточного программного компонента или внешнего интерфейсного компонента. Компоненты систем могут соединяться между собой посредством любой формы или среды цифровой передачи данных (такой как сеть связи). Примеры сети связи включают в себя локальную вычислительную сеть (LAN), глобальную вычислительную сеть (WAN), сеть цепочек блоков и Интернет.
[0120] Компьютерная система может включать в себя клиентскую сторону и сервер. Клиентская сторона и сервер, в общем, являются удаленными друг от друга и, в общем, взаимодействуют друг с другом через сеть связи. Взаимосвязь между клиентской стороной и сервером формируется посредством компьютерных программ, выполняющихся на соответствующем компьютере и имеющих клиент-серверную взаимосвязь друг с другом. Сервер может представлять собой облачный сервер, который также называется "облачным вычислительным сервером" или "облачным хостом". Облачный сервер представляет собой хост-продукт в системе предоставления облачных вычислительных услуг, который разрешает проблемы сложного управления и низкой масштабируемости бизнеса в традиционных физических хостах и VPS-услугах.
Изобретение относится к управлению тяговой системой транспортных средств. Техническим результатом является обеспечение адаптивного управления параметрами выходного крутящего момента в соответствии с режимом движения транспортного средства. Результат достигается тем, что управление крутящим моментом включает в себя: получение выходного крутящего момента двигателя и целевого выходного крутящего момента двигателя и определение разностного значения между выходным крутящим моментом двигателя и целевым крутящим моментом; получение режима движения транспортного средства и определение коэффициента отклика на величину управления педалью согласно разностному значению и режиму движения; регулирование процесса управления выходным крутящим моментом для двигателя посредством использования коэффициента отклика на величину управления педалью, с тем чтобы управлять выходным крутящим моментом двигателя таким образом, чтобы достигать требуемого крутящего момента. 3 н. и 7 з.п. ф-лы, 3 ил., 1 табл.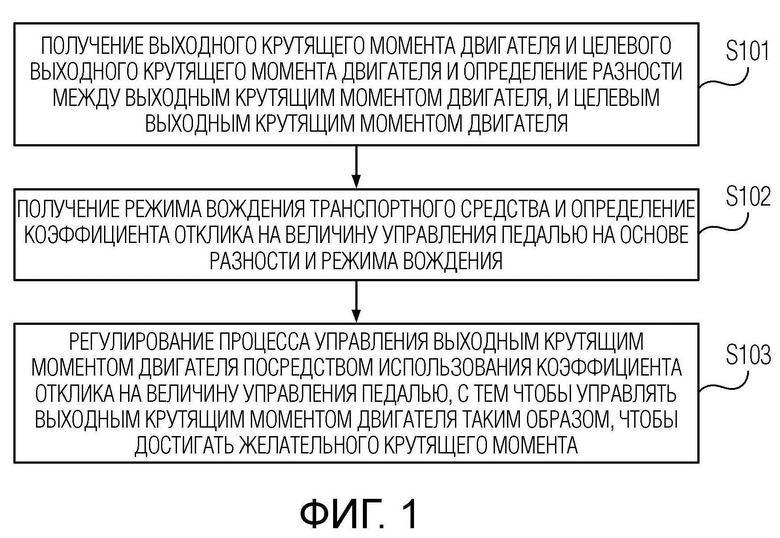
1. Способ управления крутящим моментом, включающий этапы, на которых
получают выходной крутящий момент двигателя и целевой выходной крутящий момент двигателя и определяют разность между выходным крутящим моментом двигателя и целевым выходным крутящим моментом двигателя;
получают режим вождения транспортного средства и определяют коэффициент отклика на величину управления педалью на основе разности и режима вождения; и
регулируют процесс управления выходным крутящим моментом двигателя на основе коэффициента отклика на величину управления педалью с тем, чтобы управлять выходным крутящим моментом двигателя таким образом, чтобы достигать требуемого крутящего момента.
2. Способ управления крутящим моментом по п. 1, в котором этап получения целевого выходного крутящего момента двигателя включает этапы, на которых
получают параметр управления педалью и скорость транспортного средства и определяют целевую скорость транспортного средства на основе параметра управления педалью и скорости транспортного средства; и
получают параметр веса транспортного средства и параметр дороги и определяют целевой выходной крутящий момент двигателя на основе целевой скорости транспортного средства, параметра веса транспортного средства и параметра дороги.
3. Способ управления крутящим моментом по п. 1, в котором режим вождения содержит режим водителя; и в режиме водителя коэффициент отклика на величину управления педалью использует первый коэффициент, и первый коэффициент используется для управления выходным крутящим моментом двигателя таким образом, чтобы достигать первого требуемого крутящего момента.
4. Способ управления крутящим моментом по п. 1, в котором режим вождения содержит мощностной режим; и в мощностном режиме
в случае если разность находится в первом диапазоне, коэффициент отклика на величину управления педалью использует второй коэффициент, и второй коэффициент используется для управления выходным крутящим моментом двигателя таким образом, чтобы достигать целевого выходного крутящего момента двигателя;
в случае если разность находится во втором диапазоне, коэффициент отклика на величину управления педалью использует третий коэффициент, и третий коэффициент используется для управления выходным крутящим моментом двигателя таким образом, чтобы достигать первого требуемого крутящего момента; и
в случае если разность находится в третьем диапазоне, коэффициент отклика на величину управления педалью использует четвертый коэффициент, и четвертый коэффициент используется для управления выходным крутящим моментом двигателя таким образом, чтобы достигать целевого выходного крутящего момента двигателя.
5. Способ управления крутящим моментом по п. 1, в котором режим вождения содержит экономичный режим; и в экономичном режиме
в случае если разность находится в четвертом диапазоне, коэффициент отклика на величину управления педалью использует пятый коэффициент, и пятый коэффициент используется для управления выходным крутящим моментом двигателя таким образом, чтобы достигать целевого выходного крутящего момента двигателя;
в случае если разность находится в пятом диапазоне, коэффициент отклика на величину управления педалью использует шестой коэффициент, и шестой коэффициент используется для управления выходным крутящим моментом двигателя таким образом, чтобы достигать целевого выходного крутящего момента двигателя; и
в случае если разность находится в шестом диапазоне, коэффициент отклика на величину управления педалью использует седьмой коэффициент, и седьмой коэффициент используется для управления выходным крутящим моментом двигателя таким образом, чтобы достигать целевого выходного крутящего момента двигателя.
6. Способ управления крутящим моментом по п. 2, в котором
параметр управления педалью содержит параметр степени нажатия педали акселератора, параметр степени нажатия педали тормоза, параметр темпа изменения степени нажатия педали акселератора и параметр темпа изменения степени нажатия педали тормоза; и
этап определения целевой скорости транспортного средства на основе параметра управления педалью и скорости транспортного средства включает этап, на котором
получают целевую скорость транспортного средства через способ нечеткого управления посредством приема параметра управления педалью, скорости транспортного средства и ускорения транспортного средства в качестве вводов.
7. Способ управления крутящим моментом по п. 2, в котором
первое уравнение по методу наименьших квадратов устанавливается на основе интегрального уравнения кинетической энергии, и параметр веса транспортного средства определяется через первое уравнение по методу наименьших квадратов; а
второе уравнение по методу наименьших квадратов устанавливается на основе формулы разности скоростей, и параметр дороги определяется через второе уравнение по методу наименьших квадратов.
8. Способ управления крутящим моментом по п. 7, в котором интегральное уравнение кинетической энергии является следующим:


и формула разности скоростей является следующей:
 ,
,
где m представляет параметр веса транспортного средства, θ представляет параметр дороги, v представляет скорость транспортного средства, t представляет время, μ является механической эффективностью двигателя, T является выходным крутящим моментом двигателя, i0 является передаточным отношением трансмиссии конечного редукторного привода транспортного средства, ig является передаточным отношением транспортного средства, r является радиусом колеса, A является наветренной площадью транспортного средства, Cd является коэффициентом сопротивления воздуха транспортного средства, g является гравитационным ускорением, и f является коэффициентом сопротивления крену транспортного средства.
9. Устройство управления крутящим моментом, содержащее модуль управления крутящим моментом, при этом модуль управления крутящим моментом выполнен с возможностью
получения выходного крутящего момента двигателя и целевого выходного крутящего момента двигателя и определения разности между выходным крутящим моментом двигателя и целевым выходным крутящим моментом двигателя;
получения режима вождения транспортного средства и определения коэффициента отклика на величину управления педалью на основе разности и режима вождения; и
регулирования процесса управления выходным крутящим моментом двигателя посредством использования коэффициента отклика на величину управления педалью, с тем чтобы управлять выходным крутящим моментом двигателя таким образом, чтобы достигать требуемого крутящего момента.
10. Система управления крутящим моментом, содержащая контроллер, при этом контроллер содержит исполняемую компьютером программу, и исполняемая компьютером программа выполнена с возможностью работы для осуществления способа управления крутящим моментом по любому из пп. 1-8.
| CN 113580957 A, 2021.11.02 | |||
| CN 201851218 U, 2011.06.01 | |||
| CN 111098717 A, 2020.05.05 | |||
| CN 111379633 A, 2020.07.07 | |||
| CN 109383511 A, 2019.02.26 | |||
| CN 113482790 A, 2021.10.08 | |||
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ПРИВОДЯЩЕГО УСИЛИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2020 |
|
RU2731587C1 |

