Область техники
Настоящее изобретение относится к устройству, выполненному с возможностью регулирования приводящего усилия в соответствии с величиной задействования педали акселератора.
Уровень техники
В публикации нерассмотренной заявки на патент Японии № 2016-217292 описано устройство для регулирования приводящего усилия, сконфигурированное так, что, когда водитель изменяет положение своей ступни с педали тормоза на педаль акселератора во время выхода из поворота, когда транспортное средство переключается с движения в повороте на движение по прямой, транспортное средство может двигаться стабильно, чтобы поддерживать скорость транспортного средства в это время в комфортном положении ступни водителя. В частности, карта определяется так, что целевое ускорение равно "0" при величине задействования акселератора в заданном диапазоне, который обеспечивает комфортное положение ступни при любой скорости транспортного средства, находящейся в диапазоне от низкой скорости транспортного средства до высокой скорости транспортного средства. Целевое ускорение определяется на основе карты и величины задействования акселератора.
Сущность изобретения
Устройство для регулирования приводящего усилия, описанное в публикации нерассмотренной заявки на патент Японии № 2016-217292, конфигурируется так, что транспортное средство может двигаться устойчиво, когда водитель задействует акселератор в комфортном положении ступни. То есть, устройство для регулирования приводящего усилия, описанное в публикации нерассмотренной заявки на патент Японии № 2016-217292, выполнено с возможностью увеличивать приводящее усилие вместе с увеличением в скорости транспортного средства в зависимости от сопротивления движению, такого как сопротивление воздуха или сопротивление качению между каждым колесом и дорогой, поскольку сопротивление движению увеличивается, когда скорость транспортного средства увеличивается. Более конкретно, карта определяется так, что приводящее усилие, сбалансированное с сопротивлением движению при низкой скорости транспортного средства, создается, когда величина задействования акселератора находится в нижнем предельном значении разрешенной величины задействования. Дополнительно, карта определяется таким образом, что приводящее усилие, сбалансированное с сопротивлением движению при высокой скорости транспортного средства, создается, когда величина задействования акселератора находится в верхнем предельном значении разрешенной величины задействования. То есть, приводящие усилия, изменяющиеся в диапазоне от приводящего усилия, сбалансированного с сопротивлением движению при низкой скорости транспортного средства, до приводящего усилия, сбалансированного с сопротивлением движению при высокой скорости транспортного средства, распределяются в диапазоне разрешенной величины задействования акселератора. В результате, величина изменения в приводящем усилии относительно величины изменения в величине задействования акселератора увеличивается. Таким образом, когда приводящее усилие задается так, что транспортное средство может двигаться устойчиво в диапазоне от низкой скорости транспортного средства, соответствующей относительно небольшому сопротивлению движению, до высокой скорости транспортного средства, соответствующей относительно большому сопротивлению движению, приводящее усилие может значительно изменяться, чтобы изменять скорость транспортного средства, даже если величина задействования акселератора изменяется незначительно. То есть, может быть трудно регулировать скорость транспортного средства только посредством задействования акселератора.
Настоящее изобретение предоставляет устройство для регулирования приводящего усилия для транспортного средства, с помощью которого транспортное средство может двигаться устойчиво в диапазоне величины задействования акселератора, который обеспечивает комфортное положение ступни, и с помощью которого скорость транспортного средства может легко регулироваться.
Аспект настоящего изобретения относится к устройству для регулирования приводящего усилия для транспортного средства. Устройство для регулирования приводящего усилия включает в себя блок определения величины задействования, выполненный с возможностью определять величину задействования педали акселератора, приводимой в действие водителем; блок определения скорости транспортного средства, выполненный с возможностью определять скорость транспортного средства; и электронный блок управления, выполненный с возможностью определять целевое приводящее усилие на основе величины задействования педали акселератора, которая определяется посредством блока определения величины задействования, и скорости транспортного средства, которая определяется посредством блока определения скорости транспортного средства, и выводить командный сигнал на основе целевого приводящего усилия, которое определяется. Электронный блок управления выполнен с возможностью определять, по меньшей мере, два предварительных целевых приводящих усилия на основе величины задействования педали акселератора и скорости транспортного средства, по меньшей мере, два предварительных целевых приводящих усилия включают в себя первое предварительное целевое приводящее усилие и второе предварительное целевое приводящее усилие, большее по сравнению с первым предварительным целевым приводящим усилием. Электронный блок управления выполнен с возможностью определять, на основе скорости транспортного средства, определяемой посредством блока определения скорости, является ли скорость транспортного средства равной или выше заданной скорости транспортного средства. Электронный блок управления выполнен с возможностью определять, когда скорость транспортного средства ниже заданной скорости транспортного средства, целевое приводящее усилие в случае, когда величина задействования педали акселератора находится в заданном диапазоне, на основе первого предварительного целевого приводящего усилия, и определять, когда скорость транспортного средства равна или выше заданной скорости транспортного средства, целевое приводящее усилие в случае, когда величина задействования педали акселератора находится в заданном диапазоне, на основе второго предварительного целевого приводящего усилия.
В аспекте, описанном выше, электронный блок управления может включать в себя заданную первую карту приводящего усилия для определения первого предварительного целевого приводящего усилия на основе величины задействования педали акселератора и скорости транспортного средства и заданную вторую карту приводящего усилия для определения второго предварительного целевого приводящего усилия на основе величины задействования педали акселератора и скорости транспортного средства.
В аспекте, описанном выше, электронный блок управления может быть сконфигурирован, чтобы корректировать величину задействования педали акселератора в первое скорректированное значение и второе скорректированное значение, большее по сравнению с первым скорректированным значением; и электронный блок управления может включать в себя третью карту приводящего усилия для определения первого предварительного целевого приводящего усилия на основе первого скорректированного значения и скорости транспортного средства и определения второго предварительного целевого приводящего усилия на основе второго скорректированного значения и скорости транспортного средства.
В аспекте, описанном выше, электронный блок управления может быть сконфигурирован, чтобы: задавать первое предварительное целевое приводящее усилие так, что первое предварительное целевое приводящее усилие уменьшается, когда скорость транспортного средства увеличивается; определять третье предварительное целевое приводящее усилие, которое уменьшается с заданным темпом уменьшения, меньшим по сравнению с темпом уменьшения первого предварительного целевого приводящего усилия, которое уменьшается, когда скорость транспортного средства увеличивается, и определять целевое приводящее усилие на основе третьего предварительного целевого приводящего усилия, когда величина задействования педали акселератора уменьшается, в то время как транспортное средство движется со скоростью транспортного средства, которая ниже заданной скорости транспортного средства.
В аспекте, описанном выше, электронный блок управления может быть сконфигурирован, чтобы: задавать второе предварительное целевое приводящее усилие так, что второе предварительное целевое приводящее усилие уменьшается, когда скорость транспортного средства увеличивается; и определять целевое приводящее усилие на основе меньшего усилия из второго предварительного целевого приводящего усилия и третьего предварительного целевого приводящего усилия.
Согласно аспекту настоящего изобретения, когда скорость транспортного средства ниже заданной скорости транспортного средства, целевое приводящее усилие в случае, когда величина задействования педали акселератора находится в заданном диапазоне, определяется на основе относительно небольшого первого предварительного целевого приводящего усилия, и когда скорость транспортного средства равна или выше заданной скорости транспортного средства, целевое приводящее усилие в случае, когда величина задействования педали акселератора находится в заданном диапазоне, определяется на основе относительно большого второго предварительного целевого приводящего усилия. То есть, возможно назначать соответствующее первое предварительное целевое приводящее усилие величине задействования акселератора в заданном диапазоне, так что транспортное средство может двигаться устойчиво в диапазоне скорости транспортного средства, более низком по сравнению с заданной скоростью транспортного средства, и назначать соответствующее второе предварительное целевое приводящее усилие величине задействования акселератора в заданном диапазоне, так что транспортное средство может двигаться устойчиво в диапазоне скорости транспортного средства, равном или выше заданной скорости транспортного средства. То есть, возможно уменьшать изменение в приводящем усилии в ответ на изменение в величине задействования акселератора. В результате, транспортное средство может двигаться устойчиво посредством задействования акселератора в заданном диапазоне, который обеспечивает комфортное положение ступни, и скорость транспортного средства может легко регулироваться без излишней регулировки величины задействования акселератора.
Краткое описание чертежей
Признаки, преимущества и техническое и промышленное значение примерных вариантов осуществления изобретения будут описаны ниже со ссылкой на сопровождающие чертежи, на которых аналогичные номера обозначают аналогичные элементы, и на которых:
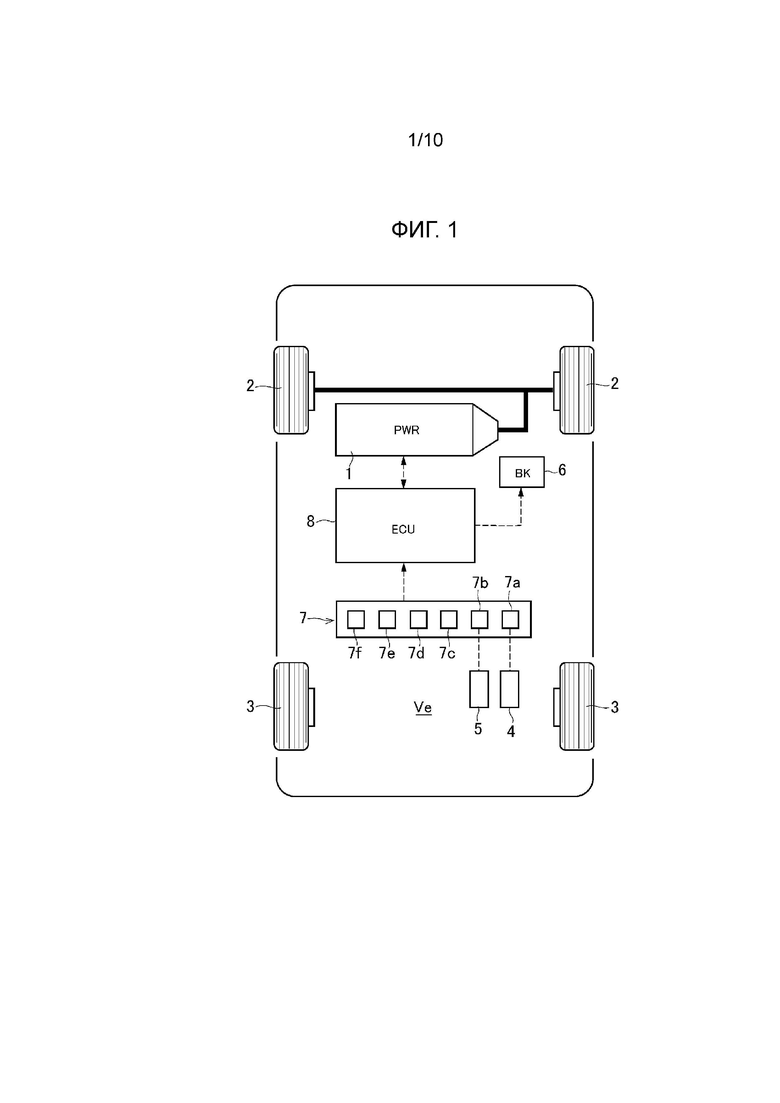
Фиг. 1 - схематичный чертеж, иллюстрирующий пример структуры и системы управления транспортного средства согласно варианту осуществления настоящего изобретения;
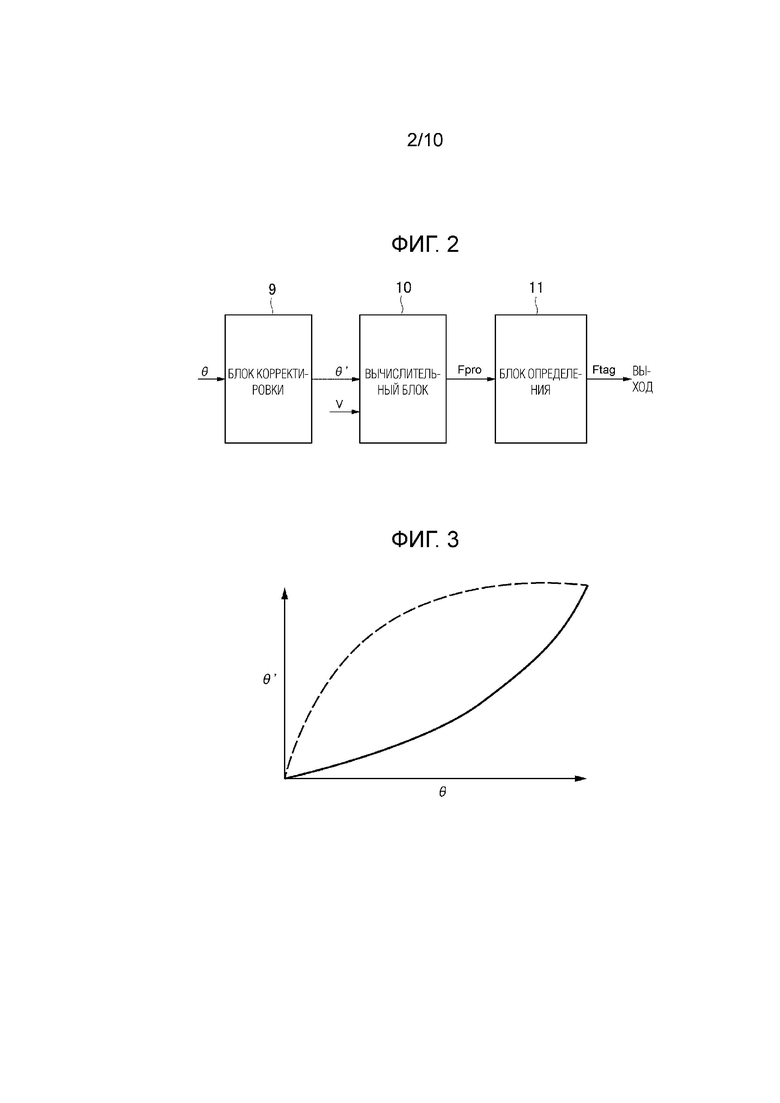
Фиг. 2 - функциональная блок-схема для описания примера управления по приводящему усилию и тормозному усилию транспортного средства;
Фиг. 3 - схематичный чертеж, иллюстрирующий пример карты для корректировки величины задействования акселератора;
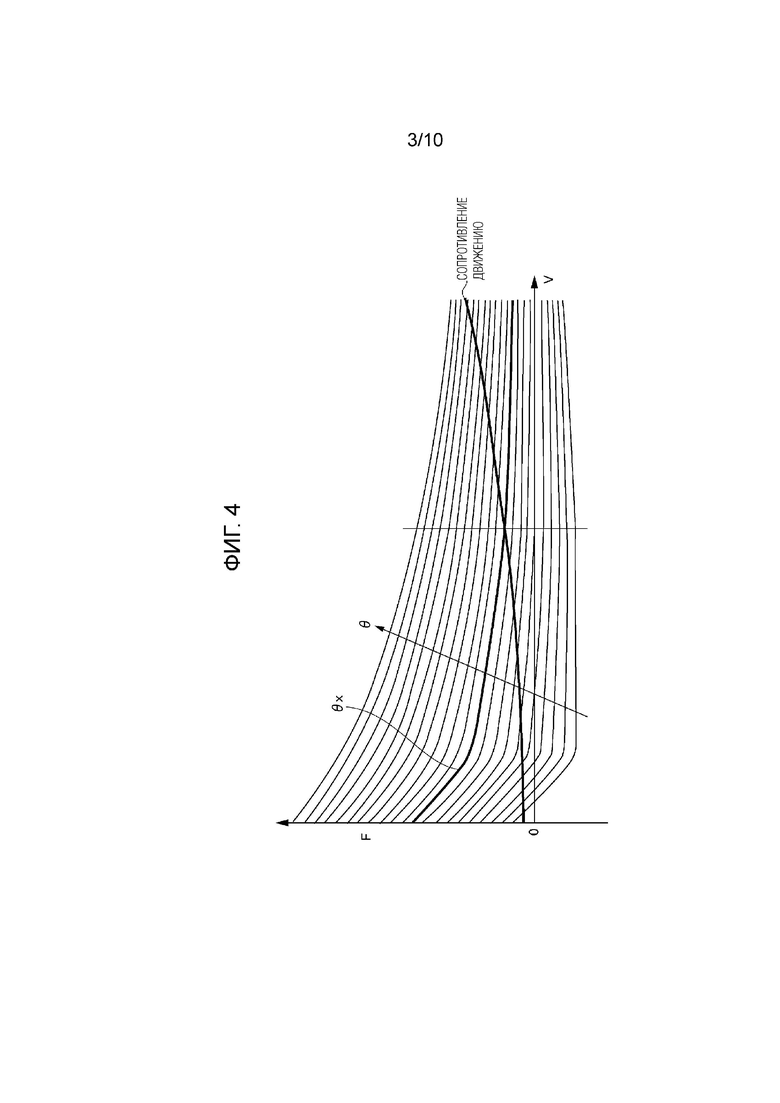
Фиг. 4 - схема, иллюстрирующая пример карты приводящего усилия для определения предварительного целевого приводящего усилия на основе величины задействования акселератора и скорости транспортного средства;
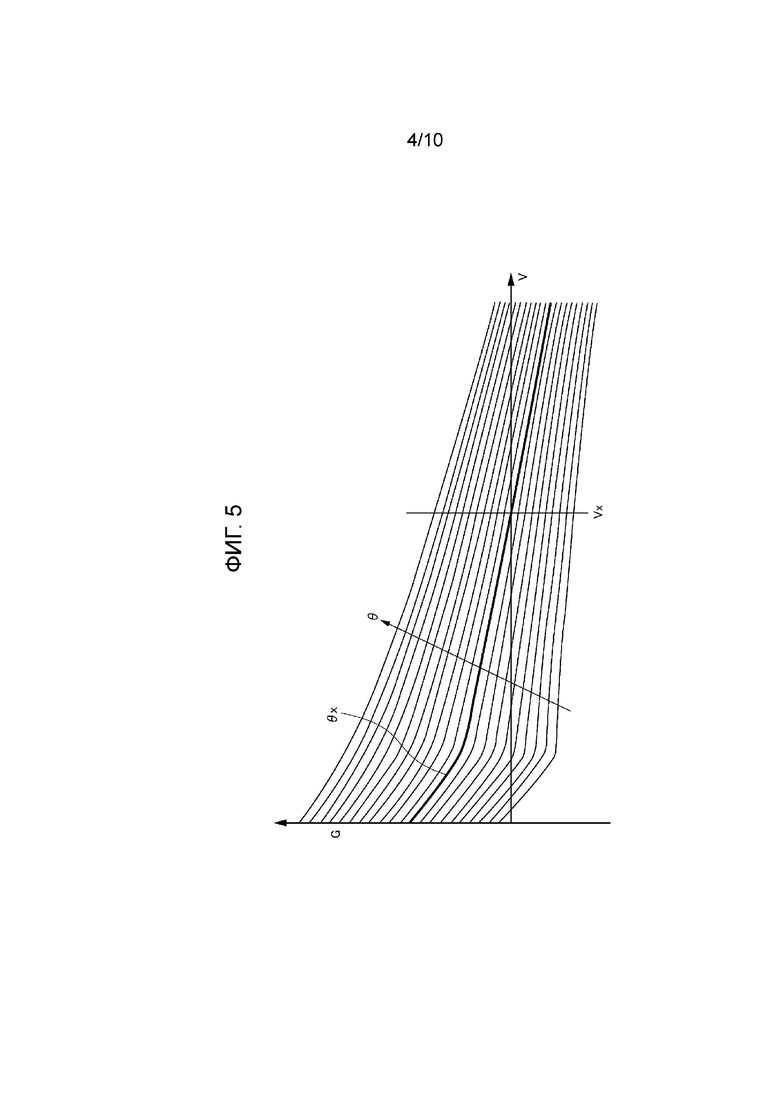
Фиг. 5 - схема, иллюстрирующая пример карты ускорения, полученной посредством замены предварительного целевого приводящего усилия с фиг. 4 ускорением;
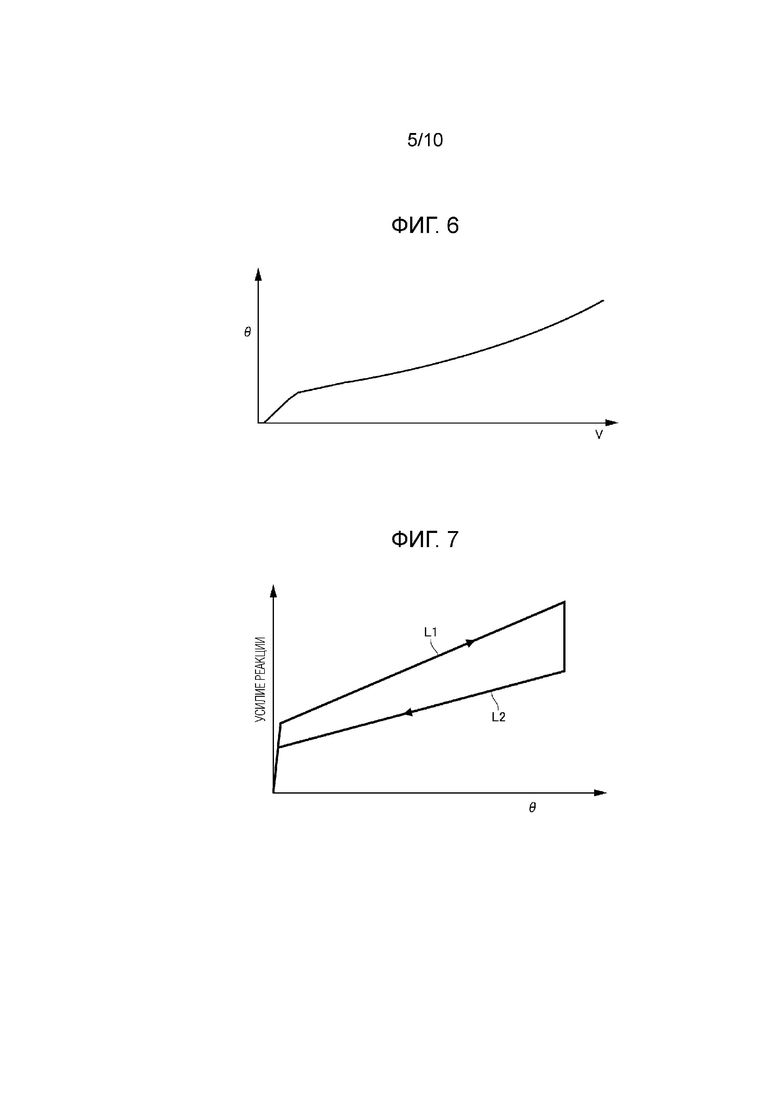
Фиг. 6 - схема, иллюстрирующая соотношение между величиной задействования акселератора и скоростью транспортного средства, которое обеспечивает устойчивое движение;
Фиг. 7 - схема, иллюстрирующая пример карты характеристики силы противодействия, показывающей соотношение между величиной задействования акселератора и величиной силы реакции механизма реакции;
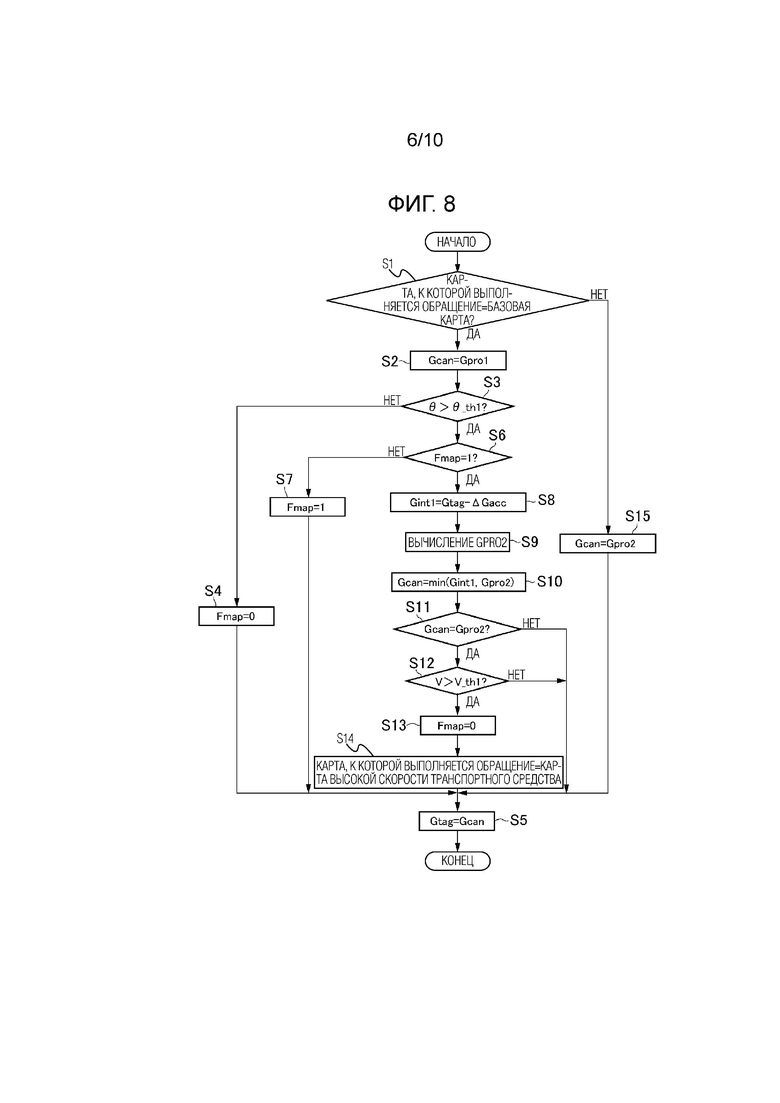
Фиг. 8 - блок-схема последовательности операций для описания примера управления устройства для регулирования приводящего усилия согласно варианту осуществления настоящего изобретения;
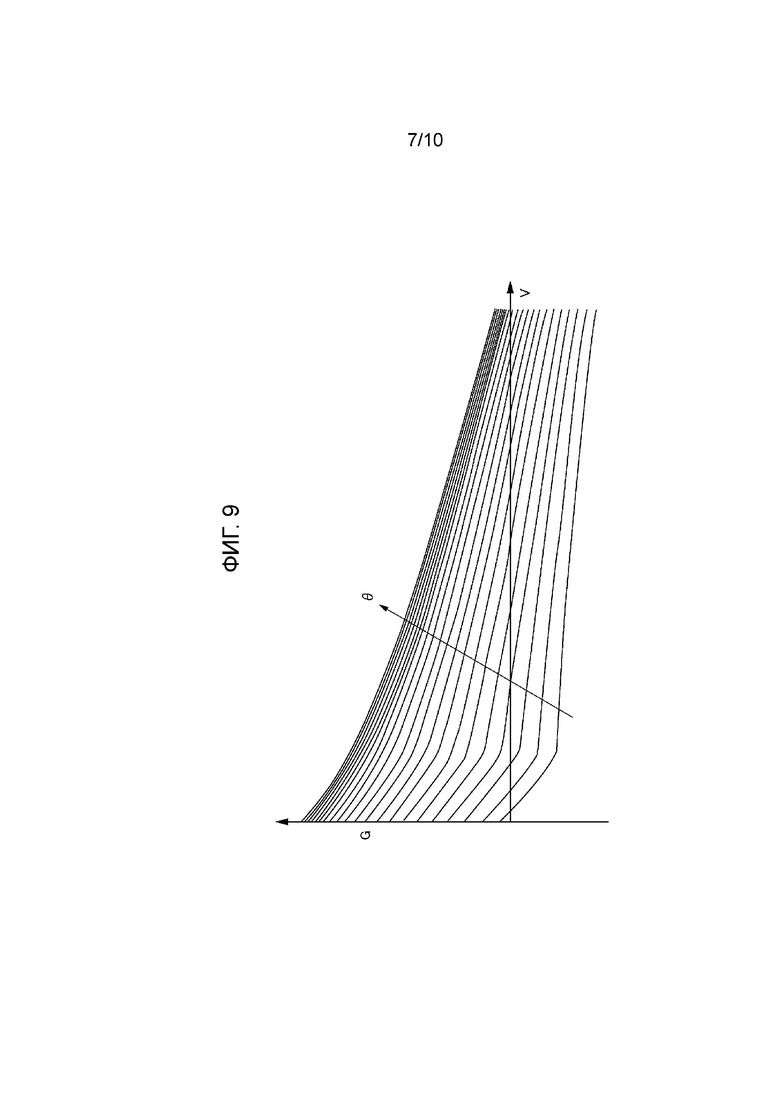
Фиг. 9 - схема, иллюстрирующая пример карты высокой скорости транспортного средства;
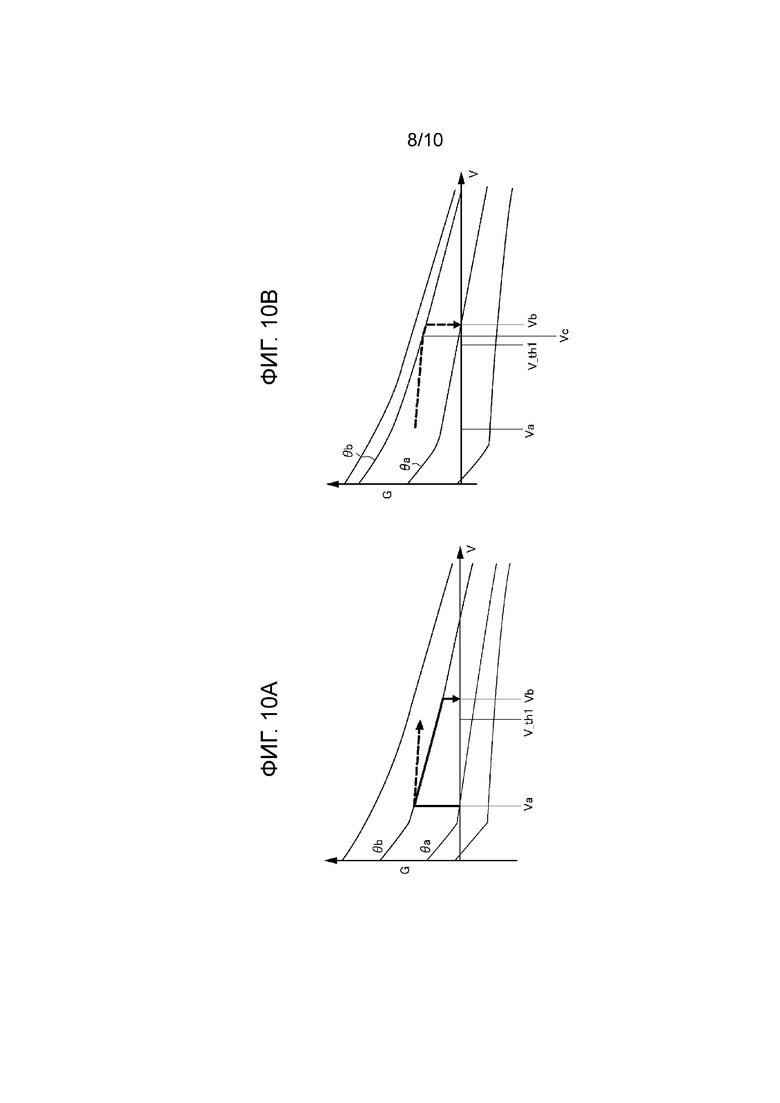
Фиг. 10A и 10B - схемы для описания изменения в целевом ускорении, когда управление в примере, иллюстрированном на фиг. 8, выполняется, при этом фиг. 10A является схемой, иллюстрирующей базовую карту, а фиг. 10B является схемой, иллюстрирующей карту высокой скорости транспортного средства;
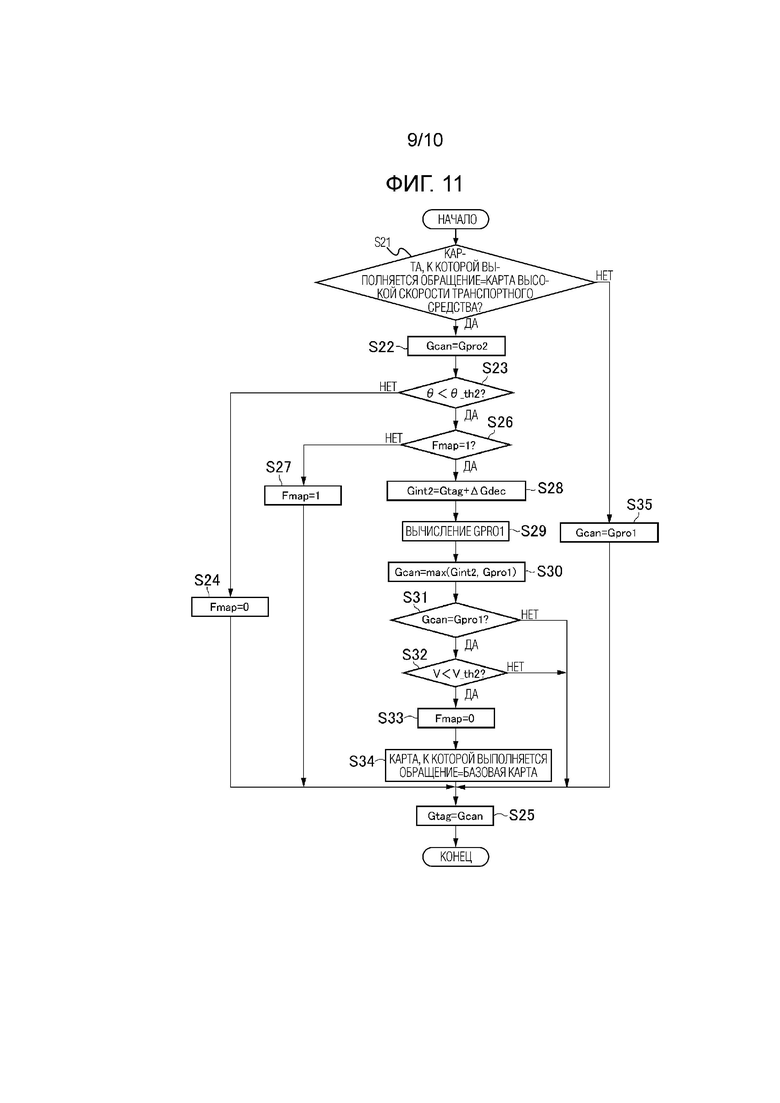
Фиг. 11 - блок-схема последовательности операций для описания примера управления для переключения карты приводящего усилия, к которой выполняется обращение (карты ускорения), с карты высокой скорости транспортного средства на базовую карту; и
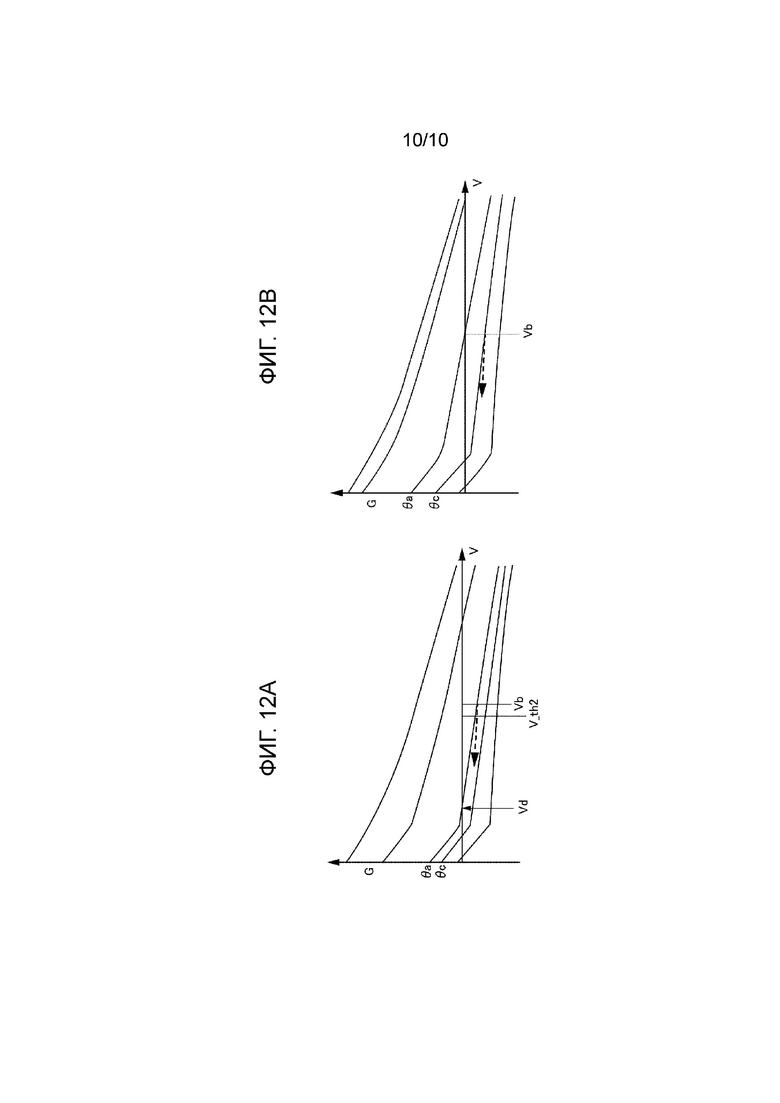
Фиг. 12A и 12B - схемы для описания изменения в целевом ускорении, когда управление в примере, иллюстрированном на фиг. 11, выполняется, при этом фиг. 12A является схемой, иллюстрирующей базовую карту, а фиг. 12B является схемой, иллюстрирующей карту высокой скорости транспортного средства.
Подробное описание вариантов осуществления изобретения
Фиг. 1 иллюстрирует пример системы привода и системы управления транспортного средства Ve согласно варианту осуществления настоящего изобретения. Транспортное средство Ve, иллюстрированное на фиг. 1, включает в себя источник (PWR) 1 привода, передние колеса 2, задние колеса 3, педаль 4 акселератора, педаль 5 тормоза, тормозное устройство (BK) 6, блок 7 определения и электронный блок (ECU) 8 управления в качестве основных компонентов.
Источник 1 привода является источником мощности, сконфигурированным, чтобы выводить крутящий момент для формирования приводящего усилия для транспортного средства Ve. Примеры приводящего усилия 1 включают в себя двигатели внутреннего сгорания, такие как бензиновый двигатель и дизельный двигатель. Источник 1 привода конфигурируется так, что регулировка мощности и рабочие условия, такие как запуск и остановка, управляются электрически. В случае бензинового двигателя, степень открытия дроссельной заслонки, объем подаваемого топлива или объем впрыска топлива, выполнение и прекращение зажигания, момент зажигания управляются электрически. В случае дизельного двигателя, объем впрыскиваемого топлива, момент впрыска топлива, или степень открытия дроссельной заслонки в системе рециркуляции отработавшего газа (EGR) управляется электрически.
Примеры источника 1 привода согласно варианту осуществления настоящего изобретения могут также включать в себя моторы, такие как синхронный мотор с постоянным магнитом и индукционный мотор с постоянным магнитом. В этом случае, мотор функционирует, например, и как мотор, выполненный с возможностью выводить крутящий момент мотора, возбуждаясь посредством источника электропитания, так и как генератор, выполненный с возможностью генерировать электричество, вращаясь в ответ на крутящий момент извне. То есть, мотор имеет функцию генерации электричества (так называемый мотор-генератор), и скорость вращения, крутящий момент или переключение между функцией мотора и функцией генератора управляется электрически.
В транспортном средстве Ve приводящее усилие создается, когда крутящий момент, выводимый от источника 1 привода, передается ведущим колесам. Фиг. 1 иллюстрирует структуру транспортного средства с приводом на передние колеса, имеющего передние колеса 2 в качестве ведущих колес. Транспортное средство Ve согласно варианту осуществления настоящего изобретения может быть транспортным средством с приводом на задние колеса, имеющим задние колеса 3 в качестве ведущих колес. Транспортное средство Ve может также быть транспортным средством с приводом на четыре колеса, имеющим и передние колеса 2, и задние колеса 3 в качестве ведущих колес. Если двигатель устанавливается в качестве источника 1 привода, транспортное средство Ve может быть сконфигурировано так, что бесступенчатая трансмиссия или ступенчатая трансмиссия (не иллюстрирована) предусматривается на выходной стороне двигателя, и приводящий крутящий момент, выводимый от источника 1 привода, передается ведущим колесам через трансмиссию.
Транспортное средство Ve снабжается педалью 4 акселератора, имеющей обычную известную структуру, и которая должна приводиться в действие водителем для регулировки приводящего усилия, чтобы ускорять транспортное средство Ve. Когда водитель нажимает педаль 4 акселератора, крутящий момент, выводимый от источника 1 привода, увеличивается вместе с величиной задействования педали 4 акселератора (величиной нажатия, величиной задействования акселератора или положением педали акселератора). Таким образом, приводящее усилие транспортного средства Ve увеличивается. Когда водитель возвращает педаль 4 акселератора (выключает акселератор, уменьшает величину задействования акселератора или возвращает положение педали акселератора), крутящий момент, выводимый от источника 1 привода, уменьшается вместе с величиной задействования педали 4 акселератора. Таким образом, приводящее усилие транспортного средства Ve уменьшается. В случае, когда мотор устанавливается в качестве источника 1 привода, если мотор функционирует в качестве генератора, чтобы формировать так называемый рекуперативный момент, тормозное усилие создается в транспортном средстве Ve. В случае, когда двигатель устанавливается в качестве источника 1 привода, если акселератор выключается, чтобы прекращать сжигание воздушно-топливной смеси в двигателе и вызывать так называемое торможение двигателем, тормозное усилие транспортного средства Ve увеличивается. Торможение двигателем - это явление, в котором момент трения или насосная потеря в двигателе служит в качестве силы сопротивления (тормозного момента) против приводящего момента, так что тормозное усилие прикладывается в транспортном средстве Ve.
Транспортное средство Ve снабжается педалью 5 тормоза, которая должна задействоваться водителем для регулировки тормозного усилия, чтобы тормозить транспортное средство Ve. Когда водитель нажимает педаль 5 тормоза, тормозное устройство 6 транспортного средства Ve задействуется, чтобы создавать тормозное усилие в транспортном средстве Ve. Примеры тормозного усилия 6 включают в себя обычные устройства предшествующего уровня техники, такие как гидравлический дисковый тормоз и гидравлический барабанный тормоз.
Блок 7 определения получает различные типы данных для управления соответствующими частями транспортного средства Ve. В частности, блок 7 определения обнаруживает различные типы данных, относящихся к рабочему состоянию педали 4 акселератора и рабочему состоянию педали 5 тормоза. Блок 7 определения является общим термином для датчиков или устройств, сконфигурированных, чтобы определять различные типы данных. В примере, иллюстрированном на фиг. 1, блок 7 определения включает в себя датчик 7a положения акселератора, датчик 7b хода тормоза, датчик 7c гидравлического давления, датчик 7d скорости колеса, датчик 7e ускорения и переключатель 7f. Датчик 7a положения акселератора обнаруживает величину задействования педали 4 акселератора (то есть, положение педали акселератора или величину задействования акселератора). Датчик 7b хода тормоза обнаруживает величину задействования педали 5 тормоза (то есть, ход педали тормоза или величину задействования педали тормоза). Датчик 7c гидравлического давления обнаруживает тормозное гидравлическое давление и усилие нажатия тормоза. Датчик 7d скорости колеса обнаруживает скорость транспортного средства. Датчик 7e ускорения обнаруживает ускорение в продольном направлении транспортного средства Ve. Переключатель 7f задействуется водителем, чтобы устанавливать режим одной педали, описанный позже. Блок 7 определения электрически соединяется с ECU 8 и выводит электрические сигналы в ECU 8 в качестве определяемых данных на основе значений определения различных датчиков или устройств, описанных выше. Датчик 7a положения акселератора является примером "блока определения величины задействования" согласно варианту осуществления настоящего изобретения. Датчик 7d скорости колеса является примером "блока определения скорости транспортного средства" согласно варианту осуществления настоящего изобретения.
ECU 8 является примером "контроллера" согласно варианту осуществления настоящего изобретения. Например, ECU 8, главным образом, конструируется из микрокомпьютера, и различные типы данных, определяемых посредством блока 7 определения, вводятся в ECU 8. ECU 8 выполняет вычисление с помощью различных типов входных данных и предварительно сохраненных данных и вычислительных формул и выводит результаты вычисления в качестве управляющих командных сигналов для управления транспортным средством Ve.
В частности, ECU 8 получает данные, относящиеся к рабочему состоянию педали 4 акселератора, которое определяется посредством датчика 7a положения акселератора, и данные, относящиеся к скорости транспортного средства, которое определяется посредством датчика 7d скорости колеса, и вычисляет целевой крутящий момент (или целевое ускорение) источника 1 привода на основе полученных частей данных. ECU 8 управляет выходной мощностью источника 1 привода на основе вычисленного целевого крутящего момента. То есть, ECU 8 выводит управляющий командный сигнал для управления источником 1 привода. Если вычисленный целевой крутящий момент (целевое ускорение) является тормозным моментом (замедлением) для замедления транспортного средства Ve, ECU 8 выводит командный сигнал для инструктирования источнику 1 привода создавать тормозной момент, соответствующий целевому моменту, или инструктирования тормозному устройству 6 создавать тормозной момент при необходимости. То есть, ECU 8 выводит управляющий командный сигнал для регулирования приводящего усилия и тормозного усилия. Фиг. 1 иллюстрирует пример, в котором предусматривается один ECU 8, но множество ECU 8 может быть предусмотрено соответственно, например, для устройств или устройств, которые должны управляться, или деталей управления.
Транспортное средство Ve согласно варианту осуществления настоящего изобретения может двигаться в так называемом режиме одной педали. В режиме одной педали, в транспортном средстве Ve, приводящее усилие (включающее в себя тормозное усилие) регулируется на основе величины задействования педали 4 акселератора, приводимой в действие водителем, в относительно широком диапазоне от максимального приводящего усилия, которое может быть создано в транспортном средстве Ve, до тормозного усилия, требуемого для нормального движения, за исключением тормозного усилия, требуемого для экстренной остановки. То есть, в режиме одной педали, замедление, включающее в себя остановку, может быть выполнено во время обычного движения без приведения в действие педали 5 тормоза. В режиме одной педали система, в целом, регулирует приводящее усилие посредством управления источником 1 привода в ответ на величину нажатия педали 4 акселератора, но может управлять тормозным устройством 6 во взаимодействии. Как описано выше, транспортное средство Ve включает в себя педаль 4 акселератора и педаль 5 тормоза и может двигаться посредством регулирования приводящего усилия и тормозного усилия на основе величин задействования педали 4 акселератора и педали 5 тормоза (нормальный режим). То есть, транспортное средство Ve может двигаться, в то же время выборочно переключая два режима движения, которые являются нормальным режимом, аналогичным режиму предшествующего уровня техники, и режимом одной педали.
Режим одной педали описывается подробно. Режим одной педали - это режим движения, в котором транспортное средство Ve ускоряется и замедляется посредством водительского воздействия только для педали 4 акселератора. Фиг. 2 - это функциональная блок-схема для описания примера управления по приводящему усилию и тормозному усилию транспортного средства Ve. В примере, иллюстрированном на фиг. 2, предоставляются блок 9 корректировки, вычислительный блок 10 и блок 11 определения. Блок 9 корректировки корректирует величину θ задействования акселератора. Вычислительный блок 10 определяет предварительное значение Fpro целевого приводящего усилия Ftag (далее в данном документе называемое предварительным целевым приводящим усилием Fpro) на основе выходного значения θ' из блока 9 корректировки и скорости V транспортного средства. Блок 11 определения определяет целевое приводящее усилие Ftag на основе предварительного целевого приводящего усилия Fpro, вычисленного посредством вычислительного блока 10.
Величина θ задействования акселератора, определяемая посредством блока 7 определения, вводится в блок 9 корректировки, иллюстрированный на фиг. 2. Блок 9 корректировки корректирует величину θ задействования акселератора с помощью карты корректировки, определенной заранее на основе сенсорного анализа или т.п. Фиг. 3 иллюстрирует пример карты корректировки. Горизонтальная ось представляет величину θ задействования акселератора, а вертикальная ось представляет скорректированное значение θ'. Как указано непрерывной линией на фиг. 3, скорректированное значение θ' увеличивается, когда величина θ задействования акселератора увеличивается. В принципе, скорректированное значение θ' уникально определяется относительно величины θ задействования акселератора. В последующем описании величина θ задействования акселератора и скорректированное значение θ' называются просто величиной θ задействования акселератора для удобства без различения.
Величина θ задействования акселератора и скорость V транспортного средства, определяемые посредством блока 7 определения, вводятся в вычислительный блок 10. Вычислительный блок 10 хранит карту приводящего усилия для определения предварительного целевого приводящего усилия Fpro на основе величины θ задействования акселератора и скорости V транспортного средства. Фиг. 4 иллюстрирует пример карты приводящего усилия. В карте приводящего усилия, иллюстрированной на фиг. 4, горизонтальная ось представляет скорость V транспортного средства, а вертикальная ось представляет приводящее усилие F. Каждая непрерывная линия указывает соотношение между скоростью V транспортного средства и приводящим усилием F, которое определяется для каждой величины θ задействования акселератора. Приводящее усилие (предварительное целевое приводящее усилие Frpo) уменьшается, когда скорость V транспортного средства увеличивается при любой величине θ задействования акселератора.
Предварительное целевое приводящее усилие Fpro, определенное посредством вычислительного блока 10, вводится в блок 11 определения. Блок 11 определения определяет целевое приводящее усилие Ftag с учетом, например, предельного значения приводящего усилия, которое определяется на основе температуры и скорости вращения источника привода. Блок 11 определения выводит целевое приводящее усилие Ftag источнику 1 привода в качестве управляющего командного сигнала. Последующее описание предоставляется при предположении, что предварительное целевое приводящее усилие Fpro, определенное посредством вычислительного блока 10, непосредственно определяется как целевое приводящее усилие Ftag без ограничения температурой источника 1 привода или т.п. Таким образом, предварительное целевое приводящее усилие Fpro называется целевым приводящим усилием Ftag.
Когда транспортное средство Ve движется, сопротивление движению, такое как сопротивление воздуха или сопротивление трению качения, создается в зависимости от скорости V транспортного средства. Сопротивление движению указывается толстой линией на фиг. 4. Когда приводящее усилие выводится на основе карты приводящего усилия, иллюстрированной на фиг. 4, ускорение создается на основе движения вперед, получаемого посредством вычитания сопротивления движению из приводящего усилия. Фиг. 5 иллюстрирует карту, полученную посредством замены целевого приводящего усилия Ftag по вертикальной оси на фиг. 4 ускорением (целевым ускорением Gtag), полученным посредством вычитания сопротивления движению из целевого приводящего усилия Ftag. Сопротивление движению в этом случае является теоретическим значением сопротивления движению, которое должно быть создано, когда транспортное средство Ve движется по ровной дороге. Изменение в сопротивлении воздуха вместе с плотностью воздуха и изменение в сопротивлении вместе с уклоном дороги не принимаются во внимание.
Когда транспортное средство Ve движется со скоростью Vx транспортного средства, и величина θ задействования акселератора равна θx, указанной толстой линией, как иллюстрировано на фиг. 5, транспортное средство Ve движется устойчиво, чтобы поддерживать постоянную скорость V транспортного средства (то есть, ускорение равно "0"), поскольку приводящее усилие является сбалансированным с сопротивлением движению. Транспортное средство Ve ускоряется, когда педаль 4 акселератора нажимается так, что величина θ задействования акселератора больше величины θx задействования акселератора. Транспортное средство Ve замедляется, когда педаль 4 акселератора нажимается так, что величина θ задействования акселератора меньше величины θx задействования акселератора.
Фиг. 6 иллюстрирует соотношение между величиной θ задействования акселератора и скоростью V транспортного средства, которое обеспечивает устойчивое движение, иллюстрированное на фиг. 5. На фиг. 6 горизонтальная ось представляет скорость V транспортного средства, а вертикальная ось представляет величину θ задействования акселератора. Как иллюстрировано на фиг. 6, величина задействования акселератора (скорректированное значение θ'), при которой ускорение равно 0, постепенно увеличивается, когда скорость V транспортного средства увеличивается.
Педаль 4 акселератора снабжается механизмом реакции (не иллюстрирован), сконфигурированным, чтобы создавать усилие реакции против усилия нажатия педали 4 акселератора. Механизм реакции настраивается так, что усилие реакции постепенно увеличивается, как иллюстрировано на фиг. 7, в диапазоне от первоначального положения, в котором водитель снимает ступню с педали 4 акселератора, до максимального положения, в котором водитель нажимает педаль 4 акселератора максимально. На фиг. 7 непрерывная линия L1 указывает характеристику усилия реакции, которое должно быть создано, когда водитель нажимает педаль 4 акселератора, а непрерывная линия L2 указывает характеристику усилия реакции, которое должно быть создано, когда водитель возвращает педаль 4 акселератора.
Для того, чтобы транспортное средство Ve могло двигаться устойчиво, как иллюстрировано на фиг. 6, водитель нажимает педаль 4 акселератора более сильно (на более значительную величину), когда скорость транспортного средства увеличивается. В это время, требуемое усилие нажатия для педали 4 акселератора увеличивается, как иллюстрировано на фиг. 7. В то время как транспортное средство Ve движется устойчиво, существует сильная вероятность того, что величина задействования педали 4 акселератора удерживается в течение относительно длительного времени. Следовательно, является возможным, что величина задействования педали 4 акселератора, которая добивается устойчивого движения, устанавливается в заданном диапазоне, который обеспечивает комфортное положение ступни водителя, определенного на основе, например, угла голеностопного сустава водителя и собственного веса педали 4 акселератора.
Подвижный диапазон педали 4 акселератора от первоначального положения до максимального положения определяется с точки зрения ее структуры. В режиме одной педали, в котором усилие, изменяющееся в диапазоне от относительно большого тормозного усилия до максимального приводящего усилия, может регулироваться посредством приведения в действие только педали 4 акселератора, величина изменения в приводящем усилии относительно величины изменения в величине задействования акселератора увеличивается, когда карта определяется так, что приводящее усилие, сбалансированное с сопротивлением движению при низкой скорости транспортного средства, выводится при нижнем предельном значении величины задействования акселератора в заданном диапазоне, который обеспечивает комфортное положение ступни, и приводящее усилие, сбалансированное с сопротивлением движению при высокой скорости транспортного средства, выводится при верхнем предельном значении величины задействования акселератора в заданном диапазоне. Таким образом, скорость V транспортного средства увеличивается в ответ лишь на легкое изменение в величине задействования акселератора. То есть, может быть трудно регулировать скорость V транспортного средства только посредством задействования акселератора.
Устройство для регулирования приводящего усилия согласно варианту осуществления настоящего изобретения может изменять соотношение между величиной задействования акселератора и целевым приводящим усилием Ftag, которое должно быть задано в зависимости от величины задействования акселератора. Фиг. 8 иллюстрирует пример управления. Как описано выше, карта ускорения, иллюстрированная на фиг. 5, основывается на значении, полученном вычитанием теоретического значения сопротивления движению из приводящего усилия, определенного в карте приводящего усилия, иллюстрированной на фиг. 4. Следовательно, карта ускорения и карта приводящего усилия могут рассматриваться как практически идентичные друг другу. В последующем описании целевое ускорение Gtag определяется с помощью карты, иллюстрированной на фиг. 5, для удобства вместо целевого приводящего усилия Ftag.
В примере, иллюстрированном на фиг. 8, определение сначала выполняется относительно того, является ли карта, на которую в настоящий момент выполняется ссылка для определения целевого ускорения Gtag, базовой картой (этап S1). Базовая карта - это карта ускорения, иллюстрированная на фиг. 5. Результатом определения на этапе S1 является "Да" до тех пор, пока карта ускорения, к которой выполняется обращение, не будет переключена, как описано позже. Базовая карта соответствует "первой карте приводящего усилия" или "третьей карте приводящего усилия" согласно варианту осуществления настоящего изобретения.
Когда результатом определения на этапе S1 является "Да", поскольку на базовую карту выполняется ссылка, первое предварительное целевое ускорение Gpro1 вычисляется на основе текущей скорости V транспортного средства, текущей величины θ задействования акселератора, и базовой карты, и сохраняется в ECU 8 в качестве возможных данных Gcan (этап S2).
Далее, выполняется определение относительно того, больше ли величина θ задействования акселератора, определяемая посредством датчика 7a положения акселератора, по сравнению с первой заданной величиной θ_th1 задействования (этап S3). Например, первая заданная величина θ_th1 задействования может быть задана в величину θ задействования акселератора, при которой ускорение G равно "0", когда скорость V транспортного средства является первой заданной скоростью V_th1 транспортного средства на этапе S12, описанном позже. Например, первая заданная величина θ_th1 задействования может быть переменной, которая изменяется в большее значение, когда угол уклона дороги увеличивается. То есть, определение выполняется на этапе S3 относительно того, нажимается ли педаль 4 акселератора до верхней предельной величины задействования в диапазоне, который обеспечивает комфортное положение ступни, или до близкой к верхней предельной величине задействования.
Когда результатом определения на этапе S3 является "Нет", поскольку величина θ задействования акселератора равна или меньше первой заданной величины θ_th1 задействования, флаг Fmap сохраняется равным "0" (Выкл.) (этап S4). Флаг Fmap указывает, что переход карты, к которой выполняется обращение, находится в процессе. Далее, возможные данные Gcan, сохраненные на этапе S2, временно сохраняются в ECU 8 в качестве целевого ускорения Gtag (этап S5), и программа временно завершается. То есть, первое предварительное целевое ускорение Gpro1 устанавливается в целевое ускорение Gtag. Приводящее усилие регулируется на основе целевого ускорения Gtag, сохраненного на этапе S5.
Когда результатом определения на этапе S3 является "Да", поскольку величина θ задействования акселератора больше первой заданной величины θ_th1 задействования, выполняется определение относительно того, равен ли "1" флаг Fmap (Вкл.) (этап S6). То есть, выполняется определение относительно того, выполнено ли уже управление для перехода карты, к которой выполняется обращение, когда текущая программа выполняется. Другими словами, выполняется определение относительно того, не завершено ли управление для перехода карты, к которой выполняется обращение, в конце предыдущей программы.
Когда результатом определения на этапе S6 является "Нет", поскольку флаг Fmap не равен "1", то есть, когда управление для перехода карты не выполняется в настоящий момент, флаг Fmap переключается в "1" (этап S7), и действие переходит к этапу S5. На этапе S5 первое предварительное целевое ускорение Gpro1, определенное на этапе S2, устанавливается в целевое ускорение Gtag. Когда результатом определения на этапе S6 является "Да", поскольку флаг Fmap равен "1", первое ускорение Gint1 в переходном режиме (промежуточное ускорение) вычисляется вычитанием заданного ускорения ΔGacc из целевого ускорения Gtag, сохраненного в ECU 8 в предыдущей программе (этап S8). Заданное ускорение ΔGacc для использования на этапе S8 устанавливается в значение, меньшее по сравнению с величиной изменения в ускорении G, вместе с увеличением скорости V транспортного средства, когда ускорение регулируется на основе базовой карты. Дополнительно, заданное ускорение ΔGacc задается так, что темп изменения в ускорении не увеличивается чрезмерно, когда карта переключается на карту высокой скорости транспортного средства, как описано позже. Этап S8 соответствует "блок вычисления в промежуточном режиме" согласно варианту осуществления настоящего изобретения. Первое ускорение Gint1 в переходном режиме соответствует "третьему предварительному целевому приводящему усилию" согласно варианту осуществления настоящего изобретения.
Далее, ускорение (далее в данном документе называемое вторым предварительным целевым ускорением Gpro2) определяется на основе текущей величины θ задействования акселератора и карты высокой скорости транспортного средства (этап S9). Карта высокой скорости транспортного средства определяется так, что ускорение Gmin, когда величина нажатия педали 4 акселератора (величина θ задействования акселератора) равна 0, и ускорение Gmax, когда величина нажатия педали 4 акселератора (величина θ задействования акселератора) является максимальной, устанавливаются равными ускорениям в базовой карте, и второе предварительное целевое ускорение Gpro2, когда педаль 4 акселератора нажимается в диапазоне, меньшем по сравнению с максимальным значением, является большим по сравнению с первым предварительным целевым ускорением Gpro1, определенным на основе базовой карты.
Более конкретно, карта высокой скорости транспортного средства определяется так, что, когда акселератор задействуется в диапазоне величины задействования акселератора, который обеспечивает комфортное положение ступни, диапазон скорости транспортного средства, в котором приводящее усилие балансируется с сопротивлением движению на основе карты высокой скорости транспортного средства, размещается выше диапазона скорости транспортного средства, в котором приводящее усилие балансируется с сопротивлением движению на основе базовой карты. Фиг. 9 иллюстрирует пример карты высокой скорости транспортного средства. В примере, иллюстрированном на фиг. 9, кривые характеристик ускорения нанесены для соответствующих заданных величин θ задействования акселератора. Когда величина θ задействования акселератора является небольшой, кривые характеристик ускорения являются разреженными. Когда величина θ задействования акселератора является большой, кривые характеристик ускорения являются плотными. В примере, иллюстрированном на фиг. 9, величина изменения во втором предварительном целевом ускорении Gpro2 относительно величины изменения в величине θ задействования акселератора увеличивается, когда величина θ задействования акселератора уменьшается. Карта высокой скорости транспортного средства соответствует "второй карте приводящего усилия" согласно варианту осуществления настоящего изобретения.
Далее, возможные данные Gcan перезаписываются ускорением G_min и сохраняются в ECU 8 (этап S10). Ускорение G_min является меньшим ускорением из первого ускорения Gint1 в переходном режиме, вычисленного на этапе S8, и второго предварительно целевого ускорения Gpro2, вычисленного на этапе S9. Далее, выполняется определение относительно того, являются ли возможные данные Gcan вторым предварительным целевым ускорением Gpro2, то есть, является ли ускорение G_min, выбранное на этапе S10, вторым предварительным целевым ускорением Gpro2 (этап S11). Этап S11 предусматривается, чтобы определять, действительно ли ускорение не изменяется ступенчато, даже если карта, к которой выполняется обращение, переключается. То есть, этап S11 предусматривается, чтобы определять, удовлетворяется ли одно из условий для переключения карты, к которой выполняется обращение, на карту высокой скорости транспортного средства.
Когда результатом определения на этапе S11 является "Нет", поскольку первое ускорение Gint1 в переходном режиме меньше второго предварительного целевого ускорения Gpro2, действие переходит к этапу S5 без выполнения последующих этапов. То есть, возможные данные Gcan, перезаписанные на этапе S10 (в этом случае, первое ускорение Gint1 в переходном режиме), временно сохраняются в ECU 8 в качестве целевого ускорения Gtag.
Как описано выше, устройство для регулирования приводящего усилия согласно варианту осуществления настоящего изобретения предназначается, чтобы задавать величину задействования акселератора во время устойчивого движения в заданном диапазоне величины задействования, который обеспечивает комфортное положение ступни водителя, и ограничивать увеличение в величине изменения в приводящем усилии относительно величины изменения в величине задействования акселератора в заданном диапазоне величины задействования. Когда величина нажатия педали 4 акселератора уменьшается при относительно низкой скорости транспортного средства, транспортное средство Ve может двигаться устойчиво при величине задействования, которая обеспечивает комфортное положение ступни водителя, посредством установки целевого ускорения Gtag на основе базовой карты без переключения карты на карту высокой скорости транспортного средства. Другими словами, если карта, к которой выполняется обращение, чтобы задавать приводящее усилие, переключается на карту высокой скорости транспортного средства при низкой скорости транспортного средства, величина нажатия педали 4 акселератора, которая обеспечивает устойчивое движение, может быть меньше нижнего предельного значения величины задействования, которое обеспечивает комфортное положение ступни водителя.
Когда результатом определения на этапе S11 является "Да", поскольку второе предварительное целевое ускорение Gpro2 меньше первого ускорения Gint1 в переходном режиме, выполняется определение относительно того, выше ли текущая скорость V транспортного средства по сравнению с первой заданной скоростью V_th1 транспортного средства (этап S12). Первая заданная скорость V_th1 транспортного средства предоставляется, чтобы определять, должна ли карта, к которой выполняется обращение, чтобы задавать приводящее усилие, быть переключена с карты низкой скорости транспортного средства на карту высокой скорости транспортного средства. Например, первая заданная скорость V_th1 транспортного средства может быть скоростью транспортного средства, определенной на основе базовой карты, так что ускорение равно "0", когда водитель нажимает педаль 4 акселератора при верхнем предельном значении величины задействования акселератора, которая обеспечивает комфортное положение ступни водителя.
Когда результатом определения на этапе S12 является "Нет", поскольку текущая скорость V транспортного средства равна или ниже первой заданной скорости V_th1 транспортного средства, действие переходит к этапу S5 без выполнения последующих этапов. То есть, возможные данные Gcan, перезаписанные на этапе S10 (в этом случае, второе предварительное целевое ускорение Gpro2), временно сохраняются в ECU 8 в качестве целевого ускорения Gtag. Когда результатом определения на этапе S12 является "Да", поскольку текущая скорость V транспортного средства выше первой заданной скорости V_th1 транспортного средства, флаг Fmap переключается в 0 (этап S13), карта, к которой выполняется обращение, переключается на карту высокой скорости транспортного средства (этап S14), и действие переходит к этапу S5. То есть, возможные данные Gcan, перезаписанные на этапе S10 (в этом случае, второе предварительное целевое ускорение Gpro2), временно сохраняются в ECU 8 в качестве целевого ускорения Gtag.
Когда результатом определения на этапе S1 является "Нет", поскольку карта, на которую в настоящий момент выполняется ссылка, не является базовой картой, второе предварительное целевое ускорение Gpro2 вычисляется на основе текущей скорости V транспортного средства, текущей величины θ задействования акселератора и карты высокой скорости транспортного средства и сохраняется в ECU 8 в качестве возможных данных Gcan (этап S15). Затем, возможные данные Gcan временно сохраняются в ECU 8 в качестве целевого ускорения Gtag (этап S5), и программа временно завершается.
В примере управления, иллюстрированном на фиг. 8, карта, к которой выполняется обращение, переключается с базовой карты на карту высокой скорости транспортного средства, когда удовлетворяются два условия. Первым условием является то, что второе предварительное целевое ускорение Gpro2 является меньшим по сравнению с первым ускорением Gint1 в переходном режиме. Вторым условием является то, что скорость V транспортного средства является более высокой по сравнению с первой заданной скоростью V_th1 транспортного средства. Приводящее усилие регулируется на основе базовой карты, когда величина задействования акселератора задается в диапазоне, который обеспечивает комфортное положение ступни, прежде чем два условия удовлетворяются. Приводящее усилие регулируется на основе карты высокой скорости транспортного средства, когда величина задействования акселератора задается в диапазоне, который обеспечивает комфортное положение ступни, после того как два условия удовлетворяются. Условие того, что второе предварительное целевое ускорение Gpro2 является меньшим по сравнению с первым ускорением Gint1 в переходном режиме, предоставляется, чтобы ограничивать ступенчатое изменение в ускорении вследствие переключения карты. Устройство для регулирования приводящего усилия согласно варианту осуществления настоящего изобретения может не использовать это условие.
Фиг. 10A и фиг. 10B являются схемами для описания изменения в целевом ускорении Gtag, когда управление в примере, иллюстрированном на фиг. 8, выполняется. Фиг. 10A иллюстрирует базовую карту. Фиг. 10B иллюстрирует карту высокой скорости транспортного средства. В состоянии, в котором транспортное средство Ve движется устойчиво со скоростью Va транспортного средства посредством нажатия педали 4 акселератора на величину θa задействования акселератора, транспортное средство Ve ускоряется посредством нажатия педали 4 акселератора до величины θb задействования акселератора, и карта переключается на карту высокой скорости транспортного средства. Затем, транспортное средство Ve движется устойчиво посредством возвращения педали 4 акселератора к величине θa задействования акселератора. В примере, иллюстрированном на фиг. 10A и фиг. 10B, целевое ускорение Gtag задается посредством выполнения ссылки на базовую карту при скорости Va транспортного средства.
Поскольку ссылка на базовую карту выполняется при скорости Va транспортного средства в примере, иллюстрированном на фиг. 10A и фиг. 10B, результатом определения на этапе S1 на фиг. 8 является "Да", и первое предварительное целевое ускорение Gpro1 определяется на основе базовой карты. Когда величина задействования акселератора равна θa при скорости Va транспортного средства, результатом определения на этапе S3 на фиг. 8 является "Нет", и, следовательно, предварительное целевое ускорение Gpro1 задается в качестве целевого ускорения Gtag. Когда величина задействования акселератора увеличивается до и удерживается равной θb в этом состоянии, первое предварительное целевое ускорение Gpro1 сначала задается в качестве целевого ускорения Gtag после увеличения в величине задействования акселератора до θb. В последующей программе в блок-схеме последовательности операций, иллюстрированной на фиг. 8, первое ускорение Gint1 в переходном режиме, полученное вычитанием предварительного ускорения ΔGacc из первого предварительного целевого ускорения Gpro1, задается в качестве целевого ускорения Gtag. То есть, целевое ускорение Gtag постепенно уменьшается таким образом, что темп изменения в ускорении относительно уменьшается, как указано прерывистой линией на фиг. 10A.
В примере, иллюстрированном на фиг. 10A и фиг. 10B, скорость V транспортного средства увеличивается до скорости транспортного средства, более высокой по сравнению с первой заданной скоростью V_th1 транспортного средства, и первое ускорение Gint1 в переходном режиме при первой заданной скорости V_th1 транспортного средства является меньшим по сравнению со вторым предварительным целевым ускорением Gpro2. Следовательно, результатом определения на этапе S11 на фиг. 8 является "Нет" до тех пор, пока первое ускорение Gint1 в переходном режиме не будет больше второго предварительного целевого ускорения Gpro2 при скорости Vc транспортного средства, иллюстрированной на фиг. 10B. Таким образом, первое ускорение Gint1 в переходном режиме задается в качестве целевого ускорения Gtag.
Когда первое ускорение Gint1 в переходном режиме является большим по сравнению со вторым предварительным целевым ускорением Gpro2 при скорости Vc транспортного средства, результатом определения на этапе S11 на фиг. 8 является "Да". В результате, второе предварительное целевое ускорение Gpro2 задается в качестве целевого ускорения Gtag. Поскольку скорость Vc транспортного средства выше первой заданной скорости V_th1 транспортного средства, результатом определения на этапе S12 на фиг. 8 является "Да" одновременно с моментом, когда результатом определения на этапе S11 является "Да". Таким образом, карта, к которой выполняется обращение, переключается на карту высокой скорости транспортного средства, когда первое ускорение Gint1 в переходном режиме больше второго предварительного целевого ускорения Gpro2.
В результате, целевое ускорение Gtag, когда величина задействования акселератора уменьшается с θb до θa при скорости Vb транспортного средства, является вторым предварительным целевым ускорением Gpro2, определенным на основе карты высокой скорости транспортного средства. Следовательно, транспортное средство Ve может двигаться устойчиво при величине θa задействования акселератора, даже после того как транспортное средство Ve ускоряется. То есть, транспортное средство Ve может двигаться устойчиво при комфортном положении ступни. В этом примере транспортное средство Ve движется устойчиво посредством возврата величины θa задействования акселератора, после того как транспортное средство Ve ускорятся, но величина задействования акселератора может быть возвращена к величине задействования, большей или меньшей по сравнению с θa. В этом случае также величина θ задействования акселератора, которая может обеспечивать устойчивое движение, может быть задана так, что водитель находится в комфортном положении ступни по сравнению со случаем, когда целевое ускорение Gtag задается на основе базовой карты.
Посредством переключения между картой, к которой выполняется обращение при относительно низкой скорости транспортного средства (базовой картой), и картой, к которой выполняется обращение при относительно высокой скорости транспортного средства (картой высокой скорости транспортного средства), величины θ задействования акселератора, которые могут обеспечивать устойчивое движение при скоростях транспортного средства в широком диапазоне скорости транспортного средства, могут быть заданы в разрешенном диапазоне, который обеспечивает комфортное положение ступни. Дополнительно, величина изменения в ускорении относительно величины изменения в величине θ задействования акселератора может быть задана практически равной величине в случае, когда ускорение управляется на основе базовой карты. Другими словами, возможно назначать соответствующее первое предварительное целевое приводящее усилие Gpro1 величине задействования акселератора в заданном диапазоне таким образом, что транспортное средство Ve может двигаться устойчиво в диапазоне скорости транспортного средства, более низком по сравнению с первой заданной скоростью V_th1 транспортного средства, и назначать соответствующее второе предварительное целевое приводящее усилие Gpro2 величине задействования акселератора в заданном диапазоне, так что транспортное средство Ve может двигаться устойчиво в диапазоне скорости транспортного средства, равном или выше первой заданной скорости V_th1 транспортного средства. То есть, возможно уменьшать изменение в приводящем усилии в ответ на изменение в величине задействования акселератора. В результате, транспортное средство Ve может двигаться устойчиво посредством задействования акселератора в заданном диапазоне, который обеспечивает комфортное положение ступни, и скорость транспортного средства может легко регулироваться без излишней регулировки величины задействования акселератора.
Изменение в ускорении вследствие переключения с базовой карты на карту высокой скорости транспортного средства может быть уменьшено посредством настройки целевого ускорения Gtag на основе первого ускорения Gint1 в переходном режиме во время ускорения. Таким образом, толчок или дискомфорт водителя может быть ограничен. Базовая карта переключается на карту высокой скорости транспортного средства, когда скорость V транспортного средства является более высокой по сравнению с первой заданной скоростью V_th1 транспортного средства. Таким образом, величина θ задействования акселератора, которая может обеспечивать устойчивое движение, может быть задана в диапазоне, который обеспечивает комфортное положение ступни, даже если величина θ задействования акселератора уменьшается таким образом, что транспортное средство Ve движется устойчиво со скоростью транспортного средства, более низкой по сравнению с первой заданной скоростью V_th1 транспортного средства.
В примере управления, иллюстрированном на фиг. 8, целевое ускорение Gtag задается на основе первого ускорения Gint1 в переходном режиме или второго предварительного целевого ускорения Gpro2 во время ускорения. Например, существует вероятность того, что скорость V транспортного средства не достигает первой заданной скорости V_th1 транспортного средства, поскольку величина нажатия педали 4 акселератора является небольшой. То, переключать ли карту или устанавливать ли первое ускорение Gint1 в переходном режиме, может быть определено на основе того, может ли скорость V транспортного средства быть равной или выше первой заданной скорости V_th1 транспортного средства. Например, скорость V транспортного средства, с которой транспортное средство Ve движется устойчиво, может быть спрогнозирована на основе базовой карты и величины θ задействования акселератора, после того как педаль 4 акселератора нажимается, и определение может быть выполнено на этапе S3 на фиг. 8 относительно того, действительно ли спрогнозированная скорость V транспортного средства выше первой заданной скорости V_th1 транспортного средства. Например, прогноз может быть выполнен на основе темпа изменения в величине θ задействования акселератора в дополнение к величине изменения в величине θ задействования акселератора. Альтернативно, определение может быть выполнено на основе того, движется ли транспортное средство Ve по дороге, где ограничение скорости изменяется на более высокую скорость транспортного средства, с помощью данных от инфраструктуры, такой как навигационная система. Альтернативно, определение может быть выполнено на основе информации о заторе в дорожном движении или расстоянии от транспортного средства, движущегося впереди, которое определяется посредством бортовой камеры.
Далее, описание предоставляется на примере управления для переключения карты, к которой выполняется обращение, чтобы задавать целевое ускорение Gtag, с карты высокой скорости транспортного средства на базовую карту. Фиг. 11 - это блок-схема последовательности операций для описания примера управления. В примере, иллюстрированном на фиг. 11, определение сначала выполняется относительно того, является ли карта, на которую в настоящий момент выполняется ссылка для определения целевого ускорения Gtag, картой высокой скорости транспортного средства (этап S21). Когда результатом определения на этапе S21 является "Да", поскольку выполняется ссылка на карту высокой скорости транспортного средства, второе предварительное целевое ускорение Gpro2 вычисляется на основе текущей скорости V транспортного средства, текущей величины θ задействования акселератора и карты высокой скорости транспортного средства и сохраняется в ECU 8 в качестве возможных данных Gcan (этап S22).
Далее, выполняется определение относительно того, меньше ли величина θ задействования акселератора, определяемая посредством датчика 7a положения акселератора, по сравнению со второй заданной величиной θ_th2 задействования (этап S23). Например, вторая заданная величина θ_th2 задействования может быть задана в величину θ задействования акселератора, при которой ускорение G равно "0", когда скорость V транспортного средства является второй заданной скоростью V_th2 транспортного средства на этапе S32. Например, вторая заданная величина θ_th2 задействования может быть переменной, которая изменяется в большее значение, когда угол уклона дороги увеличивается. То есть, определение выполняется на этапе S23 относительно того, нажимается ли педаль 4 акселератора до нижней предельной величины задействования в диапазоне, который обеспечивает комфортное положение ступни, или до близкой к нижней предельной величине задействования.
Когда результатом определения на этапе S23 является "Нет", поскольку величина θ задействования акселератора равна или больше второй заданной величины θ_th2 задействования, флаг Fmap, указывающий, что переход карты, к которой выполняется обращение, находится в процессе, удерживается равным "0" (Выкл.) (этап S24). Далее, возможные данные Gcan, сохраненные на этапе S22, временно сохраняются в ECU 8 в качестве целевого ускорения Gtag (этап S25), и программа временно завершается. То есть, второе предварительное целевое ускорение Gpro2 устанавливается в целевое ускорение Gtag. Тормозное усилие регулируется на основе целевого ускорения Gtag, сохраненного на этапе S25.
Когда результатом определения на этапе S23 является "Да", поскольку величина θ задействования акселератора меньше второй заданной величины θ_th2 задействования, выполняется определение относительно того, равен ли "1" флаг Fmap (Вкл.) (этап S26). То есть, выполняется определение относительно того, выполнено ли уже управление для перехода карты, к которой выполняется обращение, когда текущая программа выполняется. Другими словами, выполняется определение относительно того, не завершено ли управление для перехода карты, к которой выполняется обращение, в конце предыдущей программы.
Когда результатом определения на этапе S26 является "Нет", поскольку флаг Fmap не равен "1", то есть, когда управление для перехода карты не выполняется в настоящий момент, флаг Fmap переключается в "1" (этап S27), и действие переходит к этапу S25. То есть, второе предварительное целевое ускорение Gpro2, определенное на этапе S22, задается в целевое ускорение Gtag. Когда результатом определения на этапе S26 является "Да", поскольку флаг Fmap равен "1", второе ускорение Gint2 в переходном режиме (промежуточное ускорение) вычисляется посредством добавления заданного ускорения ΔGdec к целевому ускорению Gtag, сохраненному в ECU 8 в предыдущей программе (этап S28). Заданное ускорение ΔGdec для использования на этапе S28 задается в значение, меньшее по сравнению с величиной изменения в ускорении G вследствие уменьшения в скорости V транспортного средства, когда ускорение управляется на основе карты высокой скорости транспортного средства. Дополнительно, заданное ускорение ΔGdec задается таким образом, что темп изменения в ускорении не увеличивается чрезмерно, когда карта переключается на базовую карту, как описано позже.
Далее, первое предварительное целевое ускорение Gpro1 определяется на основе текущей величины θ задействования акселератора и базовой карты (этап S29). Возможные данные Gcan перезаписываются ускорением G_max и сохраняются в ECU 8 (этап S30). Ускорение G_max является более значительным ускорением из второго ускорения Gint2 в переходном режиме, вычисленного на этапе S28, и первого предварительного целевого ускорения Gpro1, вычисленного на этапе S29. В этом случае, ускорение, когда транспортное средство Ve замедляется, вычисляется как отрицательное значение, и, следовательно, возможные данные Gcan перезаписываются на этапе S30 ускорением, имеющим меньшее абсолютное значение, другими словами, меньшим замедлением из второго ускорения Gint2 в переходном режиме и первого предварительного целевого ускорения Gpro1.
Далее, выполняется определение относительно того, являются ли возможные данные Gcan первым предварительным целевым ускорением Gpro1, то есть, является ли ускорение G_max, выбранное на этапе S30, первым предварительным целевым ускорением Gpro1 (этап S31). Этап S31 предусматривается, чтобы определять, действительно ли ускорение не изменяется ступенчато, даже если карта, к которой выполняется обращение, переключается. То есть, этап S31 предусматривается, чтобы определять, удовлетворяется ли одно из условий для переключения карты, к которой выполняется обращение, на базовую карту.
Когда результатом определения на этапе S31 является "Нет", поскольку второе ускорение Gint2 в переходном режиме больше первого предварительного целевого ускорения Gpro1, действие переходит к этапу S25 без выполнения последующих этапов. То есть, возможные данные Gcan, перезаписанные на этапе S30 (в этом случае, второе ускорение Gint2 в переходном режиме), временно сохраняются в ECU 8 в качестве целевого ускорения Gtag.
Как описано выше, устройство для регулирования приводящего усилия согласно варианту осуществления настоящего изобретения предназначается, чтобы задавать величину задействования акселератора во время устойчивого движения в заданном диапазоне величины задействования, который обеспечивает комфортное положение ступни водителя, и ограничивать увеличение в величине изменения в приводящем усилии относительно величины изменения в величине задействования акселератора в заданном диапазоне величины задействования. Когда величина нажатия педали 4 акселератора слегка уменьшается при относительно высокой скорости транспортного средства, и скорость транспортного средства, с которой транспортное средство Ve движется устойчиво при уменьшенной величине задействования акселератора, равна или выше второй заданной скорости V_th2 транспортного средства, транспортное средство Ve может двигаться устойчиво с величиной задействования, которая обеспечивает комфортное положение ступни водителя, посредством задания целевого ускорения Gtag на основе карты высокой скорости транспортного средства без переключения карты на базовую карту. Другими словами, если карта, к которой выполняется обращение, чтобы задавать приводящее усилие, переключается на базовую карту при высокой скорости транспортного средства, величина нажатия педали 4 акселератора, которая обеспечивает устойчивое движение, может быть больше верхнего предельного значения величины задействования, которое обеспечивает комфортное положение ступни водителя.
Когда результатом определения на этапе S31 является "Да", поскольку первое предварительное целевое ускорение Gpro1 больше второго ускорения Gint2 в переходном режиме, выполняется определение относительно того, ниже ли текущая скорость V транспортного средства по сравнению со второй заданной скоростью V_th2 транспортного средства (этап S32). Вторая заданная скорость V_th2 транспортного средства предоставляется, чтобы определять, должна ли карта, к которой выполняется обращение, чтобы задавать приводящее усилие, быть переключена с карты высокой скорости транспортного средства на карту низкой скорости транспортного средства. Например, вторая заданная скорость V_th2 транспортного средства может быть скоростью транспортного средства, определенной на основе базовой карты, так что ускорение равно "0", когда водитель нажимает педаль 4 акселератора при нижнем предельном значении величины задействования акселератора, которая обеспечивает комфортное положение ступни водителя. Вторая заданная скорость V_th2 транспортного средства может быть той же скоростью транспортного средства, что и скорость на этапе S12 на фиг. 8, или может быть обеспечена гистерезисом, в то же время являясь заданной более низкой по сравнению со скоростью транспортного средства на этапе S12 на фиг. 8. Этап S12 на фиг. 8 и этап S32 на фиг. 11 являются примерами этапов, выполняемых посредством "блока принятия решения" в варианте осуществления настоящего изобретения.
Когда результатом определения на этапе S32 является "Нет", поскольку текущая скорость V транспортного средства равна или ниже второй заданной скорости V_th2 транспортного средства, действие переходит к этапу S25 без выполнения последующих этапов. То есть, возможные данные Gcan, перезаписанные на этапе S30 (в этом случае, первое предварительное целевое ускорение Gpro1), временно сохраняются в ECU 8 в качестве целевого ускорения Gtag. Когда результатом определения на этапе S32 является "Да", поскольку текущая скорость V транспортного средства ниже второй заданной скорости V_th2 транспортного средства, флаг Fmap переключается в 0 (этап S33), карта, к которой выполняется обращение, переключается на базовую карту (этап S34), и действие переходит к этапу S25. То есть, возможные данные Gcan, перезаписанные на этапе S30 (в этом случае, первое предварительное целевое ускорение Gpro1), временно сохраняются в ECU 8 в качестве целевого ускорения Gtag.
Когда результатом определения на этапе S21 является "Нет", поскольку карта, на которую ссылка выполняется в настоящий момент, не является картой высокой скорости транспортного средства, первое предварительное целевое ускорение Gpro1 вычисляется на основе текущей скорости V транспортного средства, текущей величины θ задействования акселератора и базовой карты и сохраняется в ECU 8 в качестве возможных данных Gcan (этап S35). Затем, возможные данные Gcan временно сохраняются в ECU 8 в качестве целевого ускорения Gtag (этап S25), и программа временно завершается.
В примере управления, иллюстрированном на фиг. 11, карта, к которой выполняется обращение, переключается с карты высокой скорости транспортного средства на базовую карту, когда удовлетворяются два условия. Первым условием является то, что первое предварительное целевое ускорение Gpro1 является большим по сравнению со вторым ускорением Gint2 в переходном режиме. Вторым условием является то, что скорость V транспортного средства является более низкой по сравнению со второй заданной скоростью V_th2 транспортного средства. Приводящее усилие (тормозное усилие) регулируется на основе карты высокой скорости транспортного средства, когда величина задействования акселератора задается в диапазоне, который обеспечивает комфортное положение ступни, после того как два условия удовлетворяются. Приводящее усилие (тормозное усилие) регулируется на основе базовой карты, когда величина задействования акселератора задается в диапазоне, который обеспечивает комфортное положение ступни, после того как два условия удовлетворяются. Условие того, что первое предварительное целевое ускорение Gpro1 является большим по сравнению со вторым ускорением Gint2 в переходном режиме, предоставляется, чтобы ограничивать ступенчатое изменение в ускорении вследствие переключения карты. Устройство для регулирования приводящего усилия согласно варианту осуществления настоящего изобретения может не использовать это условие.
Базовая карта и карта высокой скорости транспортного средства определяются так, что такое же тормозное усилие формируется в полностью отпущенном состоянии, в котором величина задействования акселератора равна "0". Заданное ускорение ΔGdec регулируется таким образом, что тормозное усилие, большее по сравнению с тормозным усилием на основе карты высокой скорости транспортного средства, создается. Второе ускорение Gint2 в переходном режиме или первое предварительное целевое ускорение Gpro1, которое имеет большее ускорение (меньшее замедление), выбирается. Таким образом, в полностью отпущенном состоянии, карта высокой скорости транспортного средства может быть переключена на базовую карту на основе скорости транспортного средства без вычисления на этапах S28-S31.
Фиг. 12A и фиг. 12B являются схемами для описания изменения в целевом ускорении Gtag, когда управление в примере, иллюстрированном на фиг. 11, выполняется. Фиг. 12A иллюстрирует базовую карту. Фиг. 12B иллюстрирует карту высокой скорости транспортного средства. В состоянии, в котором транспортное средство Ve движется устойчиво со скоростью Vb транспортного средства посредством нажатия педали 4 акселератора на величину θa задействования акселератора, транспортное средство Ve замедляется посредством уменьшения величины задействования акселератора до θc, и карта переключается на базовую карту. Затем, транспортное средство Ve движется устойчиво посредством нажатия педали 4 акселератора до величины θa задействования акселератора. В примере, иллюстрированном на фиг. 12A и фиг. 12B, целевое ускорение Gtag задается посредством выполнения ссылки на карту высокой скорости транспортного средства при скорости Vb транспортного средства.
Поскольку ссылка выполняется на карту высокой скорости транспортного средства при скорости Vb транспортного средства в примере, иллюстрированном на фиг. 12A и фиг. 12B, результатом определения на этапе S21 на фиг. 11 является "Да", и второе предварительное целевое ускорение Gpro2 определяется на основе карты высокой скорости транспортного средства. Когда величина задействования акселератора равна θa при скорости Vb транспортного средства, результатом определения на этапе S23 на фиг. 11 является "Нет", и, следовательно, второе предварительное целевое ускорение Gpro2 задается в качестве целевого ускорения Gtag. Когда величина задействования акселератора уменьшается до и удерживается равной θc, меньшей по сравнению со второй заданной величиной θ_th2 задействования в этом состоянии, второе предварительное целевое ускорение Gpro2 сначала задается в качестве целевого ускорения Gtag после уменьшения в величине задействования акселератора до θc. В последующей программе в блок-схеме последовательности операций, иллюстрированной на фиг. 11, второе ускорение Gint2 в переходном режиме, полученное добавлением заданного ускорения ΔGdec ко второму предварительному целевому ускорению Gpro2, задается в качестве целевого ускорения Gtag. То есть, целевое ускорение Gtag постепенно увеличивается таким образом, что темп изменения в ускорении относительно уменьшается, как указано прерывистой линией на фиг. 12B.
В примере, иллюстрированном на фиг. 12A и фиг. 12B, скорость V транспортного средства уменьшается до более низкой по сравнению со второй заданной скоростью V_th2 транспортного средства, и второе ускорение Gint2 в переходном режиме при второй заданной скорости V_th2 транспортного средства больше первого предварительного целевого ускорения Gpro1. Следовательно, результатом определения на этапе S31 на фиг. 11 является "Нет" до тех пор, пока второе ускорение Gint2 в переходном режиме не станет меньше первого предварительного целевого ускорения Gpro1 при скорости Vd транспортного средства, иллюстрированной на фиг. 12A. Таким образом, второе ускорение Gint2 в переходном режиме задается в качестве целевого ускорения Gtag.
Когда второе ускорение Gint2 в переходном режиме является меньшим по сравнению с первым предварительным целевым ускорением Gpro1 при скорости Vd транспортного средства, результатом определения на этапе S31 на фиг. 11 является "Да". В результате, первое предварительное целевое ускорение Gpro1 задается в качестве целевого ускорения Gtag. Поскольку скорость Vd транспортного средства ниже второй заданной скорости V_th2 транспортного средства, результатом определения на этапе S32 на фиг. 11 является "Да" одновременно с моментом, когда результатом определения на этапе S31 является "Да". Таким образом, карта, к которой выполняется обращение, переключается на базовую карту.
В результате, целевое ускорение Gtag, когда величина задействования акселератора увеличивается с θc до θa при скорости Vd транспортного средства, является первым предварительным целевым ускорением Gpro1, определенным на основе базовой карты. Следовательно, транспортное средство Ve может двигаться устойчиво при величине θa задействования акселератора, даже после того как транспортное средство Ve замедляется. То есть, транспортное средство Ve может двигаться устойчиво при комфортном положении ступни. В этом примере транспортное средство Ve движется устойчиво посредством возврата величины задействования акселератора к θa, после того как транспортное средство Ve замедляется, но величина задействования акселератора может быть возвращена к величине задействования, большей или меньшей по сравнению с θa. В этом случае также величина θ задействования акселератора, которая может обеспечивать устойчивое движение, может быть задана так, что водитель находится в комфортном положении ступни по сравнению со случаем, когда целевое ускорение Gtag задается на основе карты высокой скорости транспортного средства.
Посредством переключения карты высокой скорости транспортного средства на базовую карту во время замедления результаты, аналогичные результатам во время ускорения, могут быть получены.
Устройство для регулирования приводящего усилия согласно варианту осуществления настоящего изобретения может включать в себя три или более карт и регулировать приводящее усилие или тормозное усилие посредством переключения между картами на основе скорости транспортного средства. Примеры карт включают в себя карту, определенную таким образом, что транспортное средство движется устойчиво при величине задействования акселератора в заданном диапазоне, когда скорость транспортного средства является относительно низкой, карту, определенную таким образом, что транспортное средство движется устойчиво при величине задействования акселератора в заданном диапазоне, когда скорость транспортного средства является относительно высокой, и карту, определенную таким образом, что транспортное средство движется устойчиво при величине задействования акселератора в заданном диапазоне, когда скорость транспортного средства является промежуточной скоростью транспортного средства между относительно низкими и относительно высокими скоростями транспортного средства.
Устройство для регулирования приводящего усилия согласно варианту осуществления настоящего изобретения не ограничивается конфигурацией, в которой карта, к которой выполняется обращение, переключается, как описано выше. Например, устройство для регулирования приводящего усилия может включать в себя только базовую карту, и определять целевое приводящее усилие посредством умножения первого предварительного целевого ускорения Gpro1 на коэффициент в соответствии со скоростью транспортного средства. Как указано штриховой линией на фиг. 3, устройство для регулирования приводящего усилия может изменять скорректированное значение θ' относительно величины θ задействования акселератора в зависимости от скорости транспортного средства, то есть, определять первое скорректированное значение θ1, ассоциированное с низкой скоростью транспортного средства, и второе скорректированное значение θ2, ассоциированное с высокой скоростью транспортного средства и большее по сравнению с первым скорректированным значением θ1, и может определять целевое приводящее усилие на основе скорректированных значений и базовой карты. Дополнительно, арифметическое выражение, которое определяет соотношение между величиной задействования акселератора и целевым приводящим усилием, может быть подготовлено вместо использования карты приводящего усилия, и арифметическое выражение может быть снабжено поправочным членом в соответствии со скоростью транспортного средства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2646780C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ И УСТРОЙСТВО УПРАВЛЕНИЯ | 2016 |
|
RU2702896C1 |
| УСТРОЙСТВО ПОДАЧИ ЭЛЕКТРИЧЕСКОЙ МОЩНОСТИ | 2015 |
|
RU2627234C2 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2503559C2 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2020 |
|
RU2749924C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2631150C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖУЩЕЙ СИЛОЙ ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2575327C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2748345C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2750759C1 |
| СПОСОБ УПРАВЛЕНИЯ ТОРМОЗНОЙ/ДВИЖУЩЕЙ СИЛОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ТОРМОЗНОЙ/ДВИЖУЩЕЙ СИЛОЙ | 2015 |
|
RU2699204C1 |
Изобретение относится к устройству для регулирования приводящего усилия для транспортного средства. Устройство включает в себя блок определения величины задействования; блок определения скорости транспортного средства и электронный блок управления. Электронный блок управления выполнен с возможностью определять, когда скорость транспортного средства ниже заданной скорости транспортного средства, целевое приводящее усилие в случае, когда величина задействования педали акселератора находится в заданном диапазоне, на основе первого предварительного целевого приводящего усилия и определять, когда скорость транспортного средства равна или выше заданной скорости транспортного средства, целевое приводящее усилие в случае, когда величина задействования педали акселератора находится в заданном диапазоне, на основе второго предварительного целевого приводящего усилия. Достигается повышение надежности управления транспортным средством. 4 з.п. ф-лы, 12 ил.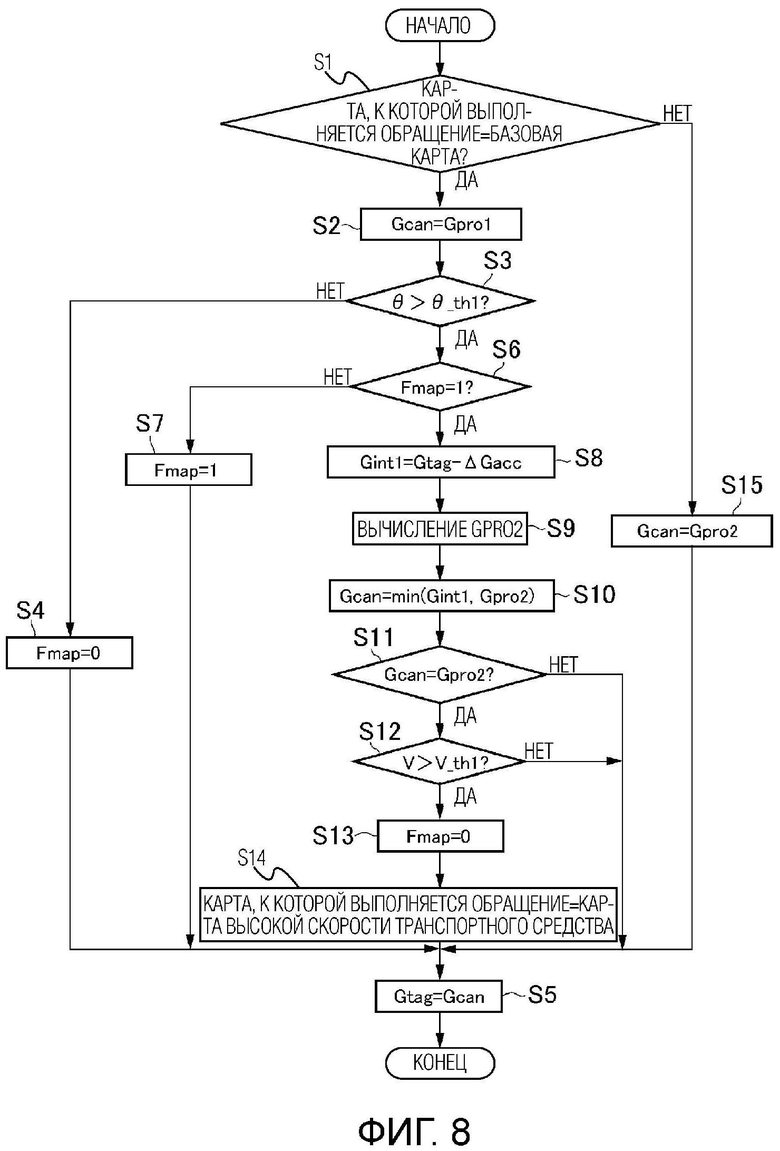
1. Устройство для регулирования приводящего усилия для транспортного средства, содержащее:
блок определения величины задействования, выполненный с возможностью определения величины задействования педали акселератора, приводимой в действие водителем;
блок определения скорости транспортного средства, выполненный с возможностью определения скорости транспортного средства; и
электронный блок управления, выполненный с возможностью:
- определения целевого приводящего усилия на основе величины задействования педали акселератора, которая определяется посредством блока определения величины задействования, и скорости транспортного средства, которая определяется посредством блока определения скорости транспортного средства, и вывода командного сигнала на основе определяемого целевого приводящего усилия;
- определения, по меньшей мере, двух предварительных целевых приводящих усилий на основе величины задействования педали акселератора и скорости транспортного средства, причем указанные, по меньшей мере, два предварительных целевых приводящих усилия включают в себя первое предварительное целевое приводящее усилие и второе предварительное целевое приводящее усилие, превышающее первое предварительное целевое приводящее усилие;
- определения, на основе скорости транспортного средства, определяемой посредством блока определения скорости транспортного средства, является ли скорость транспортного средства равной или превышающей заданную скорость транспортного средства;
- определения, когда скорость транспортного средства ниже заданной скорости транспортного средства, целевого приводящего усилия в случае, когда величина задействования педали акселератора находится в заданном диапазоне, на основе первого предварительного целевого приводящего усилия; и
- определения, когда скорость транспортного средства равна или превышает заданную скорость транспортного средства, целевого приводящего усилия в случае, когда величина задействования педали акселератора находится в заданном диапазоне, на основе второго предварительного целевого приводящего усилия.
2. Устройство для регулирования приводящего усилия по п. 1, в котором электронный блок управления включает в себя заданную первую карту приводящего усилия для определения первого предварительного целевого приводящего усилия на основе величины задействования педали акселератора и скорости транспортного средства и заданную вторую карту приводящего усилия для определения второго предварительного целевого приводящего усилия на основе величины задействования педали акселератора и скорости транспортного средства.
3. Устройство для регулирования приводящего усилия по п. 1, в котором:
электронный блок управления выполнен с возможностью корректирования величины задействования педали акселератора в первое скорректированное значение и второе скорректированное значение, превышающее первое скорректированное значение; и
электронный блок управления включает в себя третью карту приводящего усилия для определения первого предварительного целевого приводящего усилия на основе первого скорректированного значения и скорости транспортного средства и определения второго предварительного целевого приводящего усилия на основе второго скорректированного значения и скорости транспортного средства.
4. Устройство для регулирования приводящего усилия по любому из пп. 1-3, в котором электронный блок управления выполнен с возможностью:
задания первого предварительного целевого приводящего усилия таким образом, что первое предварительное целевое приводящее усилие уменьшается, когда скорость транспортного средства увеличивается;
определения третьего предварительного целевого приводящего усилия, которое уменьшается с заданным темпом уменьшения, более низким по сравнению с темпом уменьшения первого предварительного целевого приводящего усилия, которое уменьшается, когда скорость транспортного средства увеличивается; и
определения целевого приводящего усилия на основе третьего предварительно целевого приводящего усилия, когда величина задействования педали акселератора увеличивается, в то время как транспортное средство движется со скоростью транспортного средства, которая является более низкой по сравнению с заданной скоростью транспортного средства.
5. Устройство для регулирования приводящего усилия по п. 4, в котором электронный блок управления выполнен с возможностью:
задания второго предварительного целевого приводящего усилия таким образом, что второе предварительное целевое приводящее усилие уменьшается, когда скорость транспортного средства увеличивается; и
определения целевого приводящего усилия на основе меньшего приводящего усилия из второго предварительного целевого приводящего усилия и третьего предварительного целевого приводящего усилия.
| US 20180354530 A1, 13.12.2018 | |||
| Устройство управления акселератором,тормозом и сцеплением транспортного средства | 1987 |
|
SU1426868A1 |
| РЕГУЛИРУЕМЫЙ БЛОК ПЕДАЛЕЙ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 0 |
|
SU256523A1 |
| US 9061630 B2, 23.06.2015. | |||

