Изобретение относится к железнодорожному транспорту и предназначено для интервального регулирования движения поездов.
Известно вождение поездов по технологии «виртуальная сцепка» (ВСЦ), при которой группа попутно следующих поездов управляется как единый объект, части которого связаны не механически, а при помощи радиоканала передачи данных. При ВСЦ попутно следующие поезда должны быть разделены достаточным интервалом, чтобы каждый поезд мог остановиться прежде, чем достигнет последнего известного положения хвоста впередиидущего поезда. Концепция ВСЦ предполагает, что поезда, входящие в группу ВСЦ, следуют друг за другом на расстоянии, меньшем или равным тормозному пути. Реализация технологии ВСЦ требует решения ряда других задач, включая автоматизацию управления стрелками и сигналами, высокоточное координатное регулирование, надежную широкополосную беспроводную связь между поездами, а также обеспечение кибербезопасности и защиты передаваемой информации. В процессе работы системы регулирования движения в режиме ведения поездов по технологии ВСЦ, в режимах ведущий и ведомый движение осуществляется на безопасном расстоянии между поездами с непрерывной оценкой эффективности работы тормозной системы ведущего и ведомого поездов, ведением базы данных на борту локомотива зон распространения радиосигнала при работе в режиме ВСЦ и безопасного переключения режимов работы между системами УСАВП и ИСАВП-РТ-М в зонах отсутствия устойчивой радиосвязи, и автоматизированном управлении тягой и электродинамическим тормозом локомотива, путем передачи в систему управления локомотива команд управления, а также управление пневматическими тормозами состава поезда. Управление должно рассчитывается для заданного участка движения, на основании данных о составе поезда, профиле и плане пути, постоянных и временных ограничений скорости, текущих показаний локомотивного светофора и текущей скорости (https://www.avpt.ru/products/dlya-gruzovykh-lokomotivov/virtualnaya-stsepka/).
В качестве прототипа принята система управления движением поездов, которые могут следовать по технологии виртуальная сцепка. Известная система для контроля расстояния между следующими друг за другом поездами на основе цифровой радиосвязи содержит установленные на каждом локомотиве поезда приемник навигационных сигналов и бортовую радиостанцию, постовое центральное устройство, расположенное в диспетчерском центре и содержащее последовательно соединенные блок идентификации, блок вычисления расстояния между поездами и блок определения скорости сближения поездов, постовое центральное устройство дополнительно содержит последовательно соединенные блок контроля координат, формирователь электронной карты и блок принятия решений, выходом подключенный к входу аппаратно-программного устройства автоматизированного рабочего места поездного диспетчера, вход/выход которого соединен с выходом/входом блока управления сетью передачи данных, выполненной в виде IP сети, выходом подключенного к входам блока идентификации и блока контроля координат, а также - к другому входу блока определения скорости сближения, и блок памяти, входы/выходы которого соединены с выходами/входами формирователя электронной карты, блока вычисления расстояний между поездами и блока принятия решений, другой вход которого подключен к выходу блока определения скорости сближения, на каждом локомотиве установлен блок согласования интерфейсов, вход которого подключен к выходу приемника навигационных сигналов, а входы/выходы - к выходам/входам блока управления локомотивом, пульта машиниста и бортовой радиостанции, связанной по радиоканалу через соответствующую базовую станцию с IP сетью, при этом блок управления сетью передачи данных, бортовые радиостанции поездов и базовые радиостанции с помощью IP сети выполнены с возможностью организации цифровой радиосвязи на основе стандарта DMR (RU 2578646, B61L25/02, 27.03.2016).
Недостатком известной системы является сниженная пропускная способность, особенно на длинных перегонах, обусловленная тем, что ведомый локомотив не может держаться на максимально возможно близком расстоянии от хвоста ведущего поезда из-за того, что нужно применять торможение, обусловленное порядком в АЛСН проследования сигналов светофоров.
Технический результат изобретения заключается в повышении пропускной способности при сохранении требуемого уровня безопасности движения поездов.
Технический результат достигается тем, что в системе управления движением поездов следующих по технологии «виртуальная сцепка», содержащей на каждом локомотиве, вовлеченном в систему управления, блок согласования интерфейсов локомотива, первый, второй и третий входы/выходы которого соединены с выходами/входами соответственно бортовой радиостанции, блока управления локомотивом и пульта машиниста, к первому входу блока согласования интерфейсов локомотива подключен выход приемника спутниковых навигационных сигналов, согласно изобретению второй и третий входы блока согласования интерфейсов локомотива соединены соответственно с выходом блока приема сигналов АЛСН и с выходом блока прибора безопасности, вход которого подключен ко второму выходу блока приема сигналов АЛСН, а его вход/выход соединен с выходом/входом блока автоведения, к которому подключен блок бортовой базы данных автоведения, четвертый вход/выход блока согласования интерфейсов локомотива подключен к первому входу/выходу многофункционального радиомодема М-Линк, второй вход/выход которого соединен со вторым входом/выходом бортовой радиостанции, а его третий и четвертый входы/выходы соединены с выходами/входами соответственно блока управления позицией локомотива и блока хранения и передачи данных, второй вход/выход которого соединен с выходом/входом блока обработки телеметрических данных локомотива, выход многофункционального радиомодема М-Линк подключен ко входу блока автоведения включения управляющей функции повышения скорости движения локомотива на кривую автостопного торможения, при этом группа попутно следующих поездов управляется как единый объект, части которого связаны между собой по локальному радиоканалу передачи данных посредством многофункциональных радиомодемов М-Линк, и впереди идущий локомотив выполняет функцию ведущего локомотива по отношению к следующему за ним ведомому локомотиву.
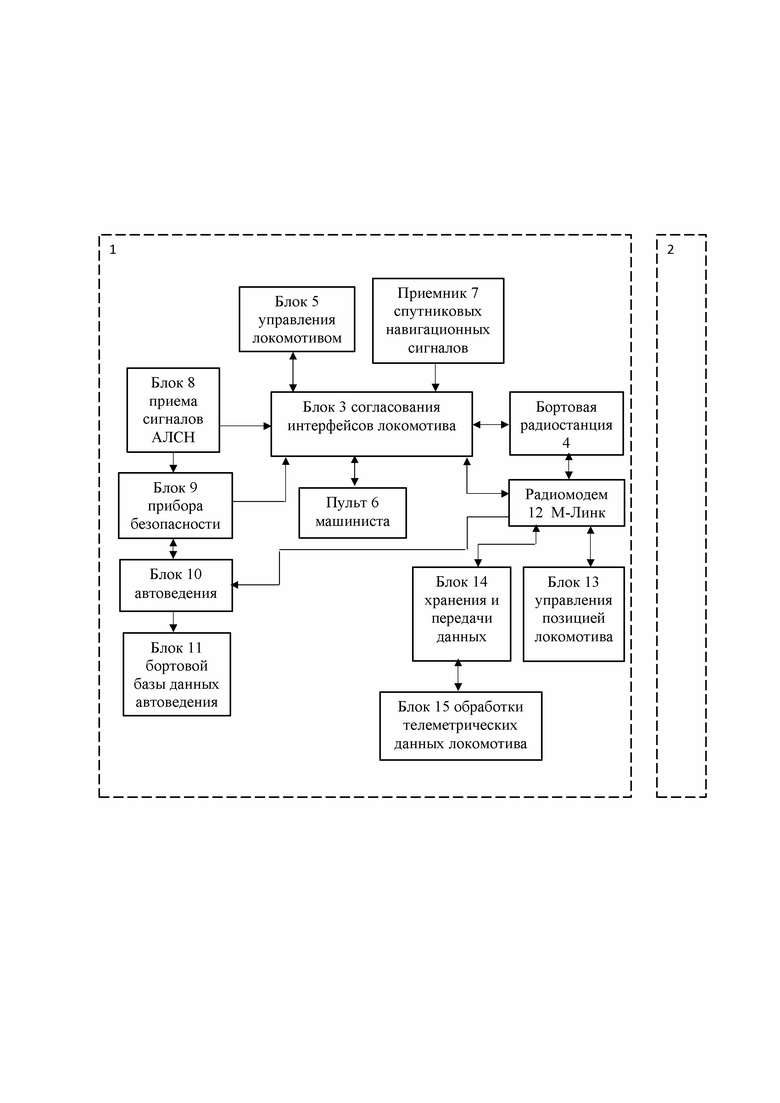
На чертеже приведена функциональная схема системы управления движением поездов, следующих по технологии «виртуальная сцепка».
Система управления движением поездов следующих по технологии «виртуальная сцепка» содержит на каждом локомотиве (1, 2), вовлеченном в систему управления, блок 3 согласования интерфейсов локомотива, первый, второй и третий входы/выходы которого соединены с выходами/входами соответственно бортовой радиостанции 4, блока 5 управления локомотивом и пульта 6 машиниста, к первому входу блока 3 согласования интерфейсов локомотива подключен выход приемника 7 спутниковых навигационных сигналов, второй и третий входы блока 3 согласования интерфейсов локомотива соединены соответственно с выходом блока 8 приема сигналов АЛСН и с выходом блока 9 прибора безопасности, вход которого подключен ко второму выходу блока 8 приема сигналов АЛСН, а его вход/выход соединен с выходом/входом блока 10 автоведения, к которому подключен блок 11 бортовой базы данных автоведения, четвертый вход/выход блока 3 согласования интерфейсов локомотива подключен к первому входу/выходу многофункционального радиомодема 12 М-Линк, второй вход/выход которого соединен со вторым входом/выходом бортовой радиостанции 4, а его третий и четвертый входы/выходы соединены с выходами/входами соответственно блока 13 управления позицией локомотива и блока 14 хранения и передачи данных, второй вход/выход которого соединен с выходом/входом блока 15 обработки телеметрических данных локомотива, выход многофункционального радиомодема 12 М-Линк подключен ко входу блока 10 автоведения включения управляющей функции повышения скорости движения локомотива на кривую автостопного торможения (управляющая команда 277), при этом группа попутно следующих поездов управляется как единый объект, части которого связаны между собой по локальному радиоканалу передачи данных посредством многофункциональных радиомодемов 12 М-Линк, и впереди идущий локомотив выполняет функцию ведущего локомотива по отношению к следующему за ним ведомому локомотиву.
Система управления движением поездов, следующих по технологии «виртуальная сцепка», функционирует следующим образом.
Технология ВСЦ, основана на передаче пакетов данных размером 28 байт (в протоколе CQPSK на скоростях в радиоканале 2,6/5,2/10,4кбит/сек в цифровом формате) через радиомодемы 12 М-Линк (радиомодемы 2Р22СВ-3 «М-Линк»), которые установлены на ведущем 1 и ведомом 2 локомотивах и обеспечивают постоянный обмен данными в режиме «точка-точка» по локальному радиоканалу передачи данных при расстояниях между ведущим 1 и ведомым 2 локомотивами до 10 км.
Данные включают данные режима стоянки, тяги, выбега, комбинированного торможения, пневматического торможения, рекуперации и другие.
На каждом локомотиве 1, 2 блок 5 управления локомотивом предназначен для обработки информации от блока 3 согласования интерфейсов локомотива с передачей графического отображения характеристик работы устройств локомотива на пульт 6 машиниста (монитор МСУД с интерфейсом системы информирования машиниста СИМ), и также для передачи на обработку управляющих команд в блок 3 согласования интерфейсов локомотива. Радиомодем 12 М-Линк, как для ведущего локомотива 1, так и для ведомого локомотива 2, при установлении соединения по идентификатору сетевого адреса через блок 13 управления позицией локомотива с распределением роли ведущий/ведомый, осуществляет через передающие устройства постоянный радиообмен с передачей пакета управляющих сообщений о координатах локомотива, длины профиля, уклона профиля, путевых объектов, пройденного расстояния и других позиций.
Основным блоком, согласующим и обрабатывающим поток данных о характеристиках движения, как ведущего, так и ведомого поездов, является блок 3 согласования интерфейсов локомотива. Он является входом для блока 9 прибора безопасности, который осуществляет контроль разрешенной скорости движения и расстояния до ближайшего путевого объекта. На вход блока 9 прибора безопасности поступают с выхода блока 8 приема сигналов АЛСН данные с компонентов систем сигнализации и блокировки и данные от блока 10 автоведения. Блок 10 автоведения формирует энергооптимальную траекторию движения локомотива в режимах тяги и выбега, за счет обновляемой информации путевых объектов инфраструктуры и профиля пути блоком 11 бортовой базы данных автоведения.
Бортовая радиостанция обеспечивает вместе с блоком 3 согласования интерфейсов локомотива гарантированный (основной и резервный каналы) обмен информацией с поездным диспетчером (ДНЦ), дежурным по станции (ДСП) и машинистом поезда (ТЧМ).
При получении блоком 10 автоведения ведомого локомотива 2, от его радиомодема 12 М-Линк сигналов включения управляющей функции повышения скорости движения локомотива на кривую автостопного торможения (управляющая команда 277), блок 10 автоведения под контролем блока 9 прибора безопасности разрешает локомотиву 2 следовать на желтый сигнал локомотивного светофора со скоростью выше 60 км/ч при движении поездов в режиме «виртуальной сцепки». Это позволяет, в частности, быстрее проследовать длинные перегоны и существенно повысить, в случае длинных перегонов, пропускную способность, по сравнению с существующей системой. При этом ведомый поезд держится на максимально возможно близком расстоянии от хвоста ведущего поезда так, чтобы не нужно было применять торможение, обусловленное порядком проследования сигналов АЛСН, но не обусловленное профилем, ограничениями скорости и временем хода и при этом выполняются все условия безопасности автоматического управления движением ведомого поезда, за счет применения его блоком 9 прибора безопасности (локомотивных систем обеспечивающих безопасность движения поезда за счет применения принудительного торможения или остановки за счет съема сигнальной информации от путевых устройств АЛСН и отображения ее на индикаторах и мониторах МСУД) и блоком 10 автоведения оптимального алгоритма автостопного торможения.
Блок 14 хранения и передачи данных осуществляет накопление, хранение и передачу данных в блок 15 обработки телеметрических данных локомотива имеющейся диагностической и телеметрической информации о состоянии оборудования локомотива в режиме соединения на ВСЦ и дальнейшей передачи на сервер СВЛ ТР в режиме реального времени объективных данных и формирования отчетов в информационных ресурсах.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система поддержания интервала разграничения между последовательно движущимися поездами | 2024 |
|
RU2839168C1 |
| Система управления движением поездов в режиме виртуальной сцепки | 2024 |
|
RU2828911C1 |
| Способ интервального регулирования движения поездов с использованием подвижных координатных отрезков на участках без путевых светофоров | 2024 |
|
RU2828493C1 |
| КОМПЛЕКСНОЕ ЛОКОМОТИВНОЕ УСТРОЙСТВО БЕЗОПАСНОСТИ | 2007 |
|
RU2420418C2 |
| Система автоматизированного управления движением поездов | 2022 |
|
RU2784101C1 |
| Устройство для управления движением поезда | 2021 |
|
RU2765515C1 |
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2475396C1 |
| СПОСОБ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ С ПРИМЕНЕНИЕМ КООРДИНАТНЫХ ОТРЕЗКОВ БЕЗ БЛОК-УЧАСТКОВ И ПУТЕВЫХ СВЕТОФОРОВ | 2021 |
|
RU2789232C1 |
| СПОСОБ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ С ПРИМЕНЕНИЕМ КООРДИНАТНЫХ ОТРЕЗКОВ | 2021 |
|
RU2789420C1 |
| СПОСОБ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ РЕЖИМОВ ДВИЖЕНИЯ ПОЕЗДОВ | 2021 |
|
RU2768303C1 |
Изобретение относится к управлению движением на железных дорогах. Система управления движением поездов, следующих по технологии «виртуальная сцепка», содержит на каждом локомотиве, вовлеченном в систему управления, блок согласования интерфейсов локомотива, бортовую радиостанцию, блок управления локомотивом, пульт машиниста, приемник спутниковых навигационных сигналов, блок приема сигналов АЛСН, блок прибора безопасности, блок автоведения, блок бортовой базы данных автоведения, многофункциональный радиомодем М-Линк, блок управления позицией локомотива, блок хранения и передачи данных и блок обработки телеметрических данных локомотива. Выход радиомодема М-Линк подключен ко входу блока автоведения включения управляющей функции повышения скорости движения локомотива на кривую автостопного торможения. При этом группа попутно следующих поездов управляется как единый объект, части которого связаны между собой по локальному радиоканалу передачи данных посредством многофункциональных радиомодемов М-Линк. Технический результат заключается в повышении пропускной способности при сохранении требуемого уровня безопасности движения поездов. 1 ил.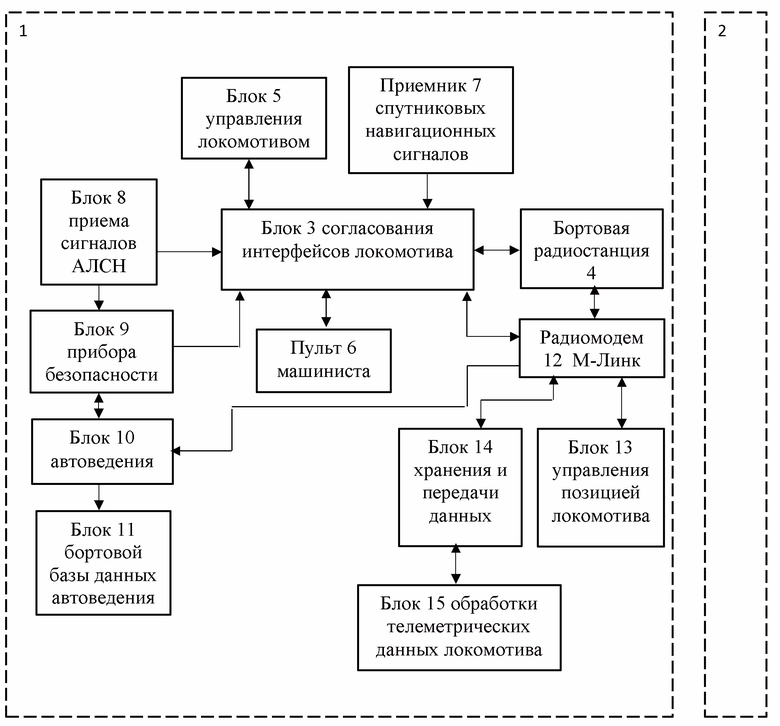
Система управления движением поездов, следующих по технологии «виртуальная сцепка», содержащая на каждом локомотиве, вовлеченном в систему управления, блок согласования интерфейсов локомотива, первый, второй и третий входы/выходы которого соединены с выходами/входами, соответственно, бортовой радиостанции, блока управления локомотивом и пульта машиниста, к первому входу блока согласования интерфейсов локомотива подключен выход приемника спутниковых навигационных сигналов, отличающаяся тем, что второй и третий входы блока согласования интерфейсов локомотива соединены, соответственно, с выходом блока приема сигналов АЛСН и с выходом блока прибора безопасности, вход которого подключен ко второму выходу блока приема сигналов АЛСН, а его вход/выход соединен с выходом/входом блока автоведения, к которому подключен блок бортовой базы данных автоведения, четвертый вход/выход блока согласования интерфейсов локомотива подключен к первому входу/выходу многофункционального радиомодема М-Линк, второй вход/выход которого соединен со вторым входом/выходом бортовой радиостанции, а его третий и четвертый входы/выходы соединены с выходами/входами, соответственно, блока управления позицией локомотива и блока хранения и передачи данных, второй вход/выход которого соединен с выходом/входом блока обработки телеметрических данных локомотива, выход многофункционального радиомодема М-Линк подключен ко входу блока автоведения включения управляющей функции повышения скорости движения локомотива на кривую автостопного торможения, при этом группа попутно следующих поездов управляется как единый объект, части которого связаны между собой по локальному радиоканалу передачи данных посредством многофункциональных радиомодемов М-Линк, и впереди идущий локомотив выполняет функцию ведущего локомотива по отношению к следующему за ним ведомому локомотиву.
| СИСТЕМА ДЛЯ КОНТРОЛЯ РАССТОЯНИЯ МЕЖДУ СЛЕДУЮЩИМИ ДРУГ ЗА ДРУГОМ ПОЕЗДАМИ НА ОСНОВЕ ЦИФРОВОЙ РАДИОСВЯЗИ | 2015 |
|
RU2578646C1 |
| Устройство для стабилизации падающей вольтамперной характеристики газоразрядного прибора | 1948 |
|
SU87399A1 |
| Система автоматического торможения подвижного состава по данным высокоточной системы координат | 2015 |
|
RU2611445C1 |
| CN 108667465 A, 16.10.2018. | |||

