Изобретение относится к области железнодорожной автоматики и телемеханики, а именно к системам управления движением поездов, и может быть использовано для повышения точности расчета кривых торможения.
Известна комплексная система позиционирования на цифровой модели путевого развития участков железной дороги подвижных объектов, имеющих навигационные коммуникационные устройства, содержащие сеть базовых станций, связанных по первым радиоканалам со спутниками навигационной системы GPS/ГЛОНАСС, причем каждая из базовых станций подключена к входу блока вычисления дифференциальных поправок, который через сеть передачи данных железнодорожного транспорта соединен с блоком позиционирования и с компьютером автоматизированного рабочего места диспетчера, при этом также система содержит связанные по вторым радиоканалам с навигационными коммуникационными устройствами подвижных объектов соответствующие базовые станции сети GSM/GPRS, которые по протоколу TCP/IP через сетевой коммутатор связаны с сетью передачи данных железнодорожного транспорта (RU 2503567, B61L 27/00, 10.01.2014). В качестве подвижных объектов в упомянутой комплексной системе позиционирования участвуют подвижные единицы рельсового транспорта и исполнители технологических процессов железнодорожного транспорта, снабженные приборами с навигационными коммуникационными устройствами, аналогичными навигационным коммуникационным устройствам подвижных единиц рельсового транспорта.
В качестве прототипа выбрана система для торможения подвижного состава, используемая в системе контроля и управления скоростным электропоездом, в которой имеется сеть размещенных вдоль железнодорожного пути референцных станций с центром обработки сигналов, включающим сервер связи и блок вычисления дифференциальной поправки, а бортовой комплекс содержит блок задания допустимых значений параметров движения электропоезда, генератор временных меток и приемо-передающее устройство, выходом соединенный со вторым входом вычислительного блока, третий вход которого подключен к выходу генератора временных меток, при этом соответствующие информационные входы центрального процессора подключены к выходам вычислительного блока, блока задания допустимых значений параметров движения электропоезда и блока памяти, а выходы - к входам блока отображения и приемо-передающего устройства, причем входы/выходы блока вычисления дифференциальной поправки через сервер связи посредством соответствующих каналов радиосвязи связаны с референцными станциями и приемо-передающим устройством, соединены также посредством соответствующих каналов радиосвязи с приемо-передающим устройством автоматизированного рабочего места поездного диспетчера (RU 94939, B61L 25/00, 10.06.2010).
Недостатком известной системы является невозможность высокоточного торможения подвижного состава, обусловленная тем, что в локомотивном комплексе встроена постоянная электронная карта маршрута с небольшим объемом, составляющим около 2 Мб, а также из-за отсутствия инерциальных систем навигации, данных об уклонах пути, расположении точечных датчиков и различных объектов инфраструктуры, без которых возможно движение только по отдельным аппроксимированным точкам.
Технический результат изобретения заключается в увеличении точности позиционирования подвижной единицы до значений, не превышающих 0,5 м, и точности торможения подвижного состава за счет использования инерциальных систем навигации, точечных датчиков уточнения положения на железнодорожном полотне, дифференциальных поправок, а также увеличения средней выборки точек позиционирования.
Технический результат достигается тем, что в систему автоматического торможения подвижного состава по данным высокоточной системы координат, содержащую в кабине управления поездом локомотивный комплекс, включающий модуль управления торможением и электронную карту памяти, а также сеть размещенных вдоль железнодорожного пути базовых станций спутниковой системы навигации с центром обработки сигналов, включающим сервер связи, с которым соединены базовые станции спутниковой системы навигации, блок вычисления дифференциальных поправок и стационарный радиомодем, согласно изобретению в кабине управления поездом установлен блок коррекции координат, состоящий из последовательно соединенных приемника спутниковой навигационной системы, блока предварительной обработки текущей координаты, ко второму входу которого подключен блок инерциальных датчиков навигации, блока вычисления, с подключенным к нему блоком хранения высокоточной карты, блок вычисления соединен с CAN интерфейсом, к которому подключены локомотивный комплекс, система автоведения и приемник сигналов напольных датчиков, несущих информацию о границах рельсовой цепи, и АЛС, второй вход блока предварительной обработки текущей координаты соединен с бортовым радиомодемом, соединенным каналом цифровой радиосвязи со стационарным радиомодемом центра обработки сигналов.
При этом локомотивный комплекс в качестве информации о местности пролегания железнодорожного пути содержит карту местности или цифровую модель местности, которая представляет собой пространственно-временную характеристику. Она показывает положение поезда с привязкой ко времени и содержит информацию о скорости, ускорении, положении поезда в каждый момент времени и, по существу, является прогнозной моделью его движения. Такая цифровая модель местности является моделью управления подвижным объектом. Особенно она важна с переходом в область скоростного движения, для которого действия человека по управлению скоростного поезда становятся неоперативными и, возможно, неэффективными. Высокоточная карта содержит в себе цифровую модель местности, в которой хранится, по возможности, полный набор параметров в точках территории: план пути, высота рельефа, инженерные сооружения, состояние железнодорожного полотна, уклоны, инфраструктуры, стрелки, контактные сети, хозяйственные объекты, расположение точечных датчиков и т.д.
Поскольку не на всех направлениях железных дорог установлены наземные дифференциальные станции, экономически нецелесообразно полностью переоснащать локомотивные комплексы высокоточными картами памяти. Установка дополнительных высокоточных карт в блоках коррекции координат требуется только на тех скоростных магистралях, где уже функционируют дифференциальные станции.
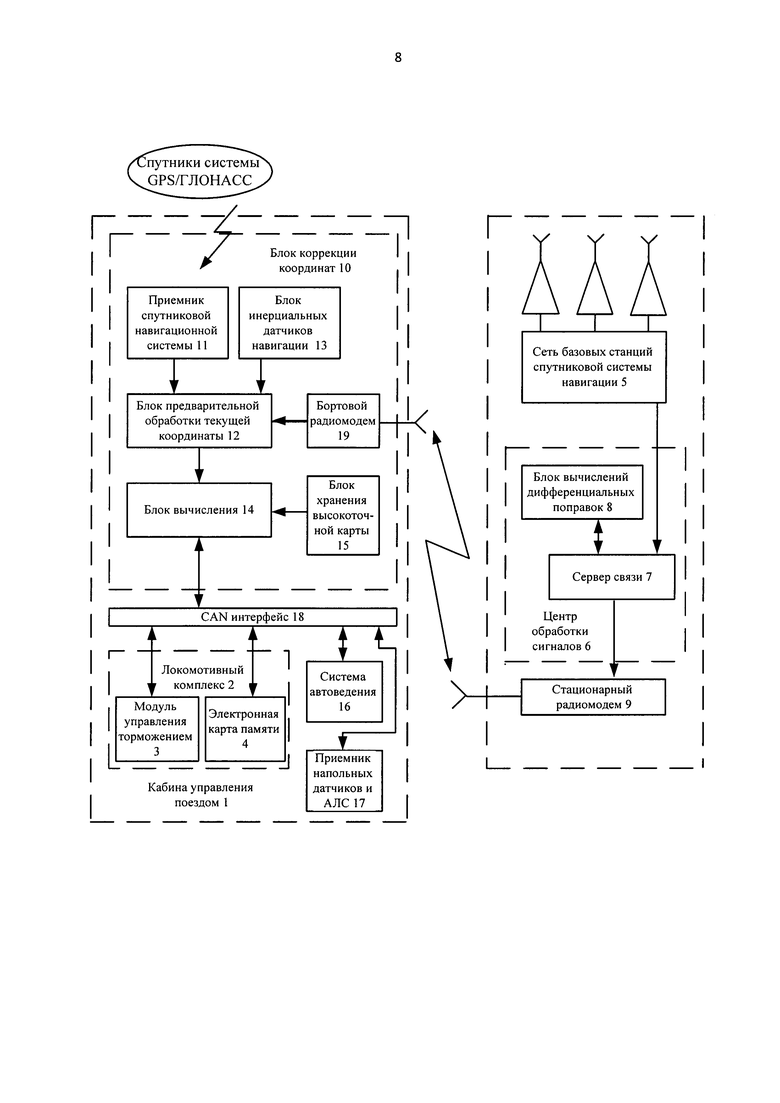
На чертеже приведена структурная схема предлагаемой системы автоматического торможения подвижного состава.
Система автоматического торможения подвижного состава по данным высокоточной системы координат содержит в кабине 1 управления поездом локомотивный комплекс 2, в качестве которого может быть КЛУБ или БЛОК, включающий модуль управления торможением 3 и электронную карту памяти 4, а также сеть размещенных вдоль железнодорожного пути базовых станций 5 спутниковой системы навигации с центром обработки сигналов 6, включающим сервер связи 7, с которым соединены базовые станции 5 спутниковой системы навигации, блок вычисления дифференциальных поправок 8 и стационарный радиомодем 9. В кабине управления поездом 1 установлен блок коррекции координат 10, состоящий из последовательно соединенных приемника спутниковой навигационной системы 11, блока предварительной обработки текущей координаты 12, ко второму входу которого подключен блок инерциальных датчиков навигации 13, блока вычисления 14, с подключенным к нему блоком хранения высокоточной карты 15, блок вычисления 14 соединен с CAN интерфейсом 18, к которому подключены локомотивный комплекс 2, система автоведения 16 и приемник 17 сигналов напольных датчиков, несущих информацию о границах рельсовой цепи, и АЛС 17, второй вход блока предварительной обработки текущей координаты 12 соединен с бортовым радиомодемом 19, соединенным каналом цифровой радиосвязи со стационарным радиомодемом 9 центра 6 обработки сигналов.
Система автоматического торможения подвижного состава по данным высокоточной системы координат работает следующим образом. С помощью измерительной аппаратуры спутниковой системы навигации определяют местоположение локомотива подвижного состава. Приемник 11 спутниковой навигационной системы кабины 1 управления поездом по каналу радиосвязи принимает информацию и определяет местоположение локомотива поезда в режиме реального времени, осуществляет соответствующее преобразование полученных сигналов и передает их в блок 12 предварительной обработки текущей координаты.
Сеть базовых станций 5 спутниковой системы навигации, координаты каждой из которых привязаны к всемирной геодезической системе ITRF, также принимают навигационные сигналы с измерительной аппаратуры спутниковой системы навигации, характеризующие их географические координаты в режиме реального времени. Система использует сеть базовых станций 5, размещенных вдоль железнодорожного пути, и систему спутниковой навигации GPS или ГЛОНАСС с измерительной аппаратурой на борту искусственных спутников Земли. Измерительная аппаратура спутниковой системы GPS или ГЛОНАСС посредством канала радиосвязи связана с приемником 11 спутниковой навигационной системы кабины 1 управления поездом и приемным устройством каждой из базовых станций 5. В состав базовых станций 5 могут входить спутниковая приемная антенна, кабель от антенны к спутниковому приемнику, модуль молниезащиты, двухчастотный спутниковый приемник RS500, адаптеры и преобразователи напряжения, каналообразующая аппаратура (на чертеже не показаны).
Блок 8 вычислений дифференциальных поправок выполнен в виде аппаратно-программного устройства и осуществляет следующие действия:
- вычисляет в режиме реального времени величину дифференциальной поправки на основе данных местоположения базовых станций 5, полученных в реальных условиях от измерительной аппаратуры, и сведений об их истинных координатах;
- передает ее через сервер 7 связи и стационарный радиомодем 9 посредством канала радиосвязи в блок 12 предварительной обработки текущей координаты через бортовой радиомодем 19 блока коррекции координат 10.
Дифференциальная поправка служит для уточнения положения объекта в реальных условиях местности, по которой движется подвижной состав. Она снижает погрешность определения поезда от 2-3 метров до 1-2 сантиметров. Это позволяет повысить точность определения скорости и ускорения подвижного состава, а также точность координаты точки на местности, в которой должна произойти остановка. Это позволяет повысить эффективность управления поезда и его торможения.
Блок 12 предварительной обработки текущей координаты осуществляет прием и преобразование полученных сигналов и корректирует географические координаты местонахождения поезда с учетом дифференциальной поправки и с учетом данных от инерциальной навигационной системы, а затем направляет их в блок 14 вычисления. Инерциальная система навигации представляет собой установку в кабине 1 управления поездом блока 13 инерциальных датчиков навигации, которые гасят (минимизируют) погрешности скачков спутниковых навигационных систем.
Блок 14 вычисления выполнен в виде аппаратно-программного устройства, которое:
- формирует данные реального времени с корректировкой по астрономическому времени на основе сигналов космической системы спутниковой навигации;
- в режиме реального времени запрашивает координаты из блока 15 хранения высокоточной карты и данные из приемника 17 сигналов напольных датчиков, несущих информацию о границах рельсовой цепи, и АЛС. Приемник 17 сигналов напольных датчиков в момент переключения светофора принимает сигнал, несущий информацию о пересечении границы рельсовой цепи, который формируется в момент изменения сигнала светофора, что позволяет уточнять координаты положения поезда на железнодорожном полотне;
- производит поиск точки текущего позиционирования на основании общих данных от высокоточной системы, радиоданных, данных от инерциальных датчиков позиционирования;
- осуществляет пересчет географических координат поезда в железнодорожные;
- через заданные промежутки времени и в необходимый момент торможения передает фактические координаты поезда через CAN интерфейс 18 в модуль управления торможением 3 локомотивного комплекса 2 для осуществления работы системы 16 автоведения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления движением поездов в режиме виртуальной сцепки | 2024 |
|
RU2828911C1 |
| УСТРОЙСТВО КОНТРОЛЯ ЗА УПРАВЛЕНИЕМ ПОЕЗДА И БДИТЕЛЬНОСТЬЮ МАШИНИСТА | 2011 |
|
RU2499713C2 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОЗИЦИОНИРОВАНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ НА ЦИФРОВОЙ МОДЕЛИ ПУТЕВОГО РАЗВИТИЯ СТАНЦИИ | 2012 |
|
RU2503567C1 |
| Способ интервального регулирования движения поездов и система для его реализации | 2018 |
|
RU2693357C1 |
| СИСТЕМА ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ ПОДВИЖНОГО СОСТАВА ИЛИ ЛОКОМОТИВА С ПРИБЫВАЮЩИМ ИЛИ ОТПРАВЛЯЮЩИМСЯ СО СТАНЦИИ ПОЕЗДОМ | 2004 |
|
RU2288856C2 |
| Система управления движением поездов, следующих по технологии "виртуальная сцепка" | 2024 |
|
RU2839169C1 |
| КОМПЛЕКСНОЕ ЛОКОМОТИВНОЕ УСТРОЙСТВО БЕЗОПАСНОСТИ | 2007 |
|
RU2420418C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДА | 2010 |
|
RU2446069C1 |
| Система интервального регулирования движения поездов на основе спутниковых навигационных средств и цифрового радиоканала с координатным методом контроля | 2016 |
|
RU2618659C1 |
| УНИФИЦИРОВАННЫЙ ВЫЧИСЛИТЕЛЬНЫЙ КОМПЛЕКС СИСТЕМЫ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ | 2009 |
|
RU2405702C1 |
Изобретение относится к области железнодорожной автоматики и телемеханики, для управления движением поездов. Система содержит установленные в кабине управления поездом блок коррекции координат, соединительный CAN интерфейс, систему автоведения, приемник сигналов напольных датчиков, локомотивный комплекс, включающий модуль управления торможением и электронную карту памяти. Причем блок коррекции координат включает приемник спутниковой навигационной системы, блок предварительной обработки текущей координаты, блок инерциальных датчиков навигации, блок вычисления, блок хранения высокоточной карты и бортовой радиомодем. Вдоль железнодорожного пути размещена сеть базовых станций спутниковой системы навигации с центром обработки сигналов, включающим сервер связи, с которым соединены базовые станции спутниковой системы навигации, блок вычисления дифференциальных поправок и стационарный радиомодем. Достигается повышение точности позиционирования и торможения подвижного состава. 1 ил.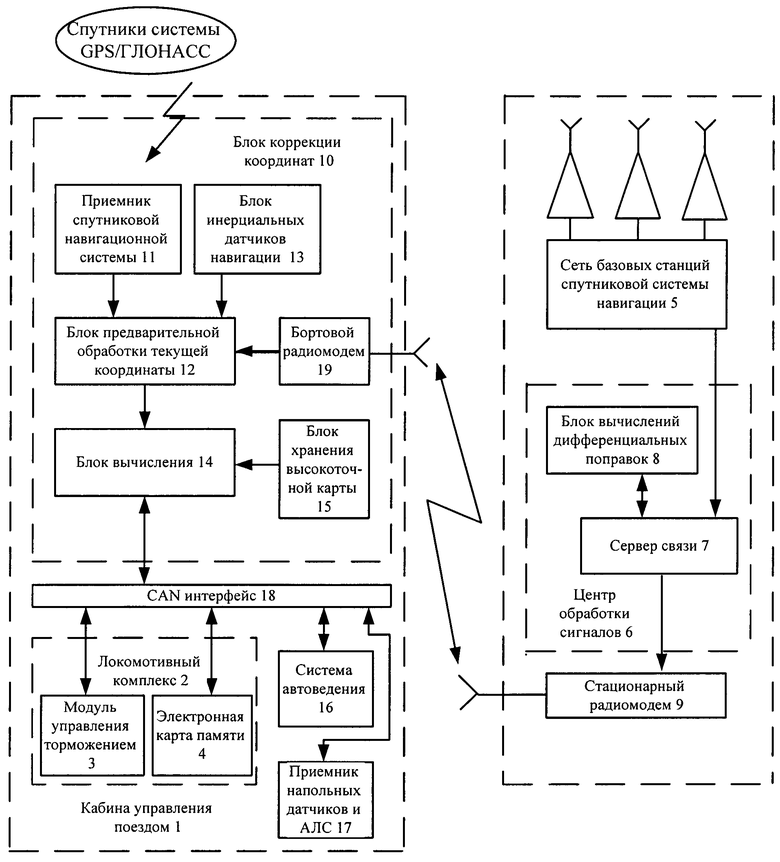
Система автоматического торможения подвижного состава по данным высокоточной системы координат, содержащая в кабине управления поездом локомотивный комплекс, включающий модуль управления торможением и электронную карту памяти, а также сеть размещенных вдоль железнодорожного пути базовых станций спутниковой системы навигации с центром обработки сигналов, включающим сервер связи, с которым соединены базовые станции спутниковой системы навигации, блок вычисления дифференциальных поправок и стационарный радиомодем, отличающаяся тем, что в кабине управления поездом установлен блок коррекции координат, состоящий из последовательно соединенных приемника спутниковой навигационной системы, блока предварительной обработки текущей координаты, ко второму входу которого подключен блок инерциальных датчиков навигации, блока вычисления, с подключенным к нему блоком хранения высокоточной карты, блок вычисления соединен с CAN интерфейсом, к которому подключены локомотивный комплекс, система автоведения и приемник сигналов напольных датчиков, несущих информацию о границах рельсовой цепи, и АЛС, второй вход блока предварительной обработки текущей координаты соединен с бортовым радиомодемом, соединенным каналом цифровой радиосвязи со стационарным радиомодемом центра обработки сигналов.
| Диффузионный нож для получения свекловичной стружки | 1952 |
|
SU94939A1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДА | 2010 |
|
RU2446069C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОЗИЦИОНИРОВАНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ НА ЦИФРОВОЙ МОДЕЛИ ПУТЕВОГО РАЗВИТИЯ СТАНЦИИ | 2012 |
|
RU2503567C1 |
| СПОСОБ УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ТЯГОВОГО ПОДВИЖНОГО СОСТАВА И ЕДИНАЯ КОМПЛЕКСНАЯ СИСТЕМА (ЕКС) ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2355596C1 |
| JP 2009280126 A, 03.12.2009. | |||

