Изобретение относится к устройствам специализированного ветеринарного МРТ для неинвазивной диагностической визуализации патологий конечностей лошадей в стоячем положении, обеспечивающим защиту животного от травматизации при проведении обследования, а именно к мобильному магниту ветеринарного ортопедического МРТ с управляемым устройством перекрытия технологического проема фальшпола рабочего места томографа.
Ортопедическая магнитно-резонансная томография стоящей лошади позволяет получать детальные, с широкими возможностями магнитно-резонансного контрастирования изображения исследуемых отделов ее конечности в проекциях произвольной ориентации. Применение метода обеспечивает высокоинформативную диагностику патологий конечностей лошади, превышающую по своей диагностической ценности результаты рентгеновского и УЗИ-обследований.
При проведении обследования конечности стоящей лошади на ветеринарном ортопедическом МРТ лошадь, для ее успокоения, медикаментозно вводится в состояние легкой седации, которое обычно сопровождается определенными трудностями по обеспечению длительного неподвижного размещения лошади на рабочем месте томографа и постоянным при этом, точным совмещением центра исследуемого отдела ее конечности с центром рабочей зоны магнита томографа. В отличие от обследования на МРТ животных в лежачем положении, проводимого под действием глубокого наркоза, обследование стоящей лошади на МРТ рассматриваемого типа весьма требовательно к обеспечению безопасности для ее здоровья, поскольку, находясь под действием легких седативных препаратов в состоянии полусна она способна, выполняя спонтанные, амплитудные перемещения, повредить оборудование или, что значительно хуже - причинить себе вред.
Особенностью типовой конструкции МРТ для исследования конечностей лошади в стоячем положении является использование в ней мобильного магнита, рабочее положение которого относительно исследуемого отдела конечности стоящей лошади настраивается благодаря возможности управляемого перемещения магнита, при котором он может перемещаться вдоль исследуемой конечности. Для обеспечения такого взаимного размещения инструмента исследования относительно исследуемого объекта требуется обеспечить возможность погружения магнита в пол процедурного помещения, что реализуется за счет создания высокого фальшпола с технологическими проемами для полюсов магнита в нем. Так, например, для проведения исследования копыта лошади на МРТ с U-образным магнитом в составе требуется погрузить магнит в фальшпол для совмещения его рабочей зоны, находящейся в центре межполюсного пространства магнита с копытом, опирающимся на межполюсной выступ фальшпола. При исследовании же проксимальных отделов конечности стоящей лошади в процессе настройки рабочего положения мобильного магнита томографа магнит выводится из технологического проема фальшпола вверх, освобождая проем, при попадании в который лошадь может получить травму.
По указанным причинам на ветеринарном ортопедическом МРТ обязательным становится принятие мер по обеспечению безопасности для стоящей на рабочем месте в состоянии полусна лошади во всех фазах проведения длительного обследования. Эти меры, включая целевые методические и технические решения, принимаются с учетом необходимости долговременного неподвижного и безопасного размещения исследуемого отдела конечности лошади в рабочей зоне магнита томографа, а также необходимости эргономичного и безопасного размещения не участвующих в обследовании конечностей лошади на рабочем месте процедурного помещения с исключением возможности их попадания в технологический проем фальшпола, предназначенный для размещения в нем полюсов мобильного магнита.
Из уровня техники известны следующие аналоги предложенного изобретения.
Из источника JPH0236842A (опуб. 06.02.1990 г., МПК A61B5/055; G01R33/20; G01R33/38; (IPC1-7): A61B5/055; G01R33/38;) известен способ обнаружения заболевания ноги лошади на ранней стадии путем размещения животного в заранее определенном положении с помощью фиксирующей рамы, окружая ногу разъемной радиочастотной катушкой, в то время как противоположные полюса магнита расположены так, чтобы зафиксировать между собой радиочастотную катушку и настроить рабочее положение магнита, перемещая его по вертикали к нижней части ноги. Когда лошадь заводится в фиксирующую раму, верхняя грань магнита находится вровень с поверхностью пола, чтобы предотвратить попадание копыта лошади в отверстие для магнита в полу. В этом положении, когда нога лошади размещена в заранее определенном положении, которое является центральной зоной между противоположными магнитными полюсами магнита, на опорной поверхности пола устанавливается радиочастотная катушка, а затем магнит медленно поднимается на заранее определенную высоту напротив. После завершения диагностики магнит опускается до уровня поверхности пола, а затем радиочастотная катушка снимается с ноги перед тем, как лошадь выводится из фиксирующей рамы. Следует отметить, что радиочастотная катушка состоит из двух половин, соединяемых друг с другом таким образом, что образуют катушку.
В данном аналоге вопрос защиты конечности лошади от попадания в отверстие подиума при выводе из него магнита не раскрыт.
В патенте US10989774B2 (опуб. 27.04.2021 г., МПК A61B5/055; G01R33/38; G01R33/3815;) раскрыто изобретение, которое относится к вертикально убирающемуся узлу магнитного поля (далее - узлу сканирования) МРТ для системы МРТ, такой как система для МРТ-обследования лошадей. Система МРТ для лошадей включает систему позиционирования, которая выполнена с возможностью перемещения узла сканирования между первым положением и вторым положением. Первое положение может быть положением покоя или скрытым положением узла сканирования. В первом положении узел сканирования убран заподлицо с поверхностью подиума или до такой степени, что животное может безопасно выйти из магнитного узла. Второе положение может быть рабочим положением узла сканирования или выведенным его положением над поверхностью подиума, и оно задается в зависимости от исследуемого отдела ноги лошади так, чтобы этот отдел мог быть размещен между магнитными полюсами узла сканирования. Таким образом, для подходящего перемещения узла сканирования между первым положением и вторым положением используется система позиционирования. Система позиционирования включает в себя несущую мобильную опорную конструкцию, к которой узел сканирования прикреплен с помощью обычных средств крепления. Несущая конструкция действует как платформа для маневрирования узла сканирования между первым положением и вторым положением. Несущая конструкция дополнительно соединена с первой направляющей, установленной на элементе пола и ориентированной горизонтально. Несущая конструкция может быть соединена с первой направляющей посредством роликов или любого другого подходящего средства, обеспечивающего перемещение узла сканирования вдоль первой направляющей. Система позиционирования дополнительно включает в себя и вторую направляющую, установленную поперек первой направляющей. По существу, вторая направляющая может образовывать L-образную или Т-образную конструкцию в зависимости от расположения продолжения первой направляющей после пересечения второй. Вторая направляющая выполнена с возможностью вертикального перемещения, т.е. перемещения по оси «Z». Система позиционирования узла сканирования также включает в себя приводной механизм, соединенный с несущей узел сканирования конструкцией. Приводной механизм связан с вычислительным блоком, который сконфигурирован для приведения в действие приводного механизма для управления несущей конструкцией узла сканирования.
В данном аналоге вопрос защиты конечности лошади от попадания в отверстие подиума при выводе из него узла сканирования не раскрыт.
Наиболее близким решением является патент CA2471244A1 (опуб. 26.06.2003 г., A61B5/055; G01N24/00; G01R33/28; G01R33/38) на МРТ Hallmarq Standing Equine MRI (sMRI), обеспечивающий возможность сканирования ноги лошади или конечности другого животного, имеющий в своем составе защитное устройство. Подиум процедурного помещения МРТ sMRI содержит элемент подиума, на котором стоит подлежащая сканированию нога лошади. Подиум расположен над опорной поверхностью магнитного сканирующего устройства МРТ и включает в себя по меньшей мере один элемент, который может перемещаться, открывая в нем пазы для размещения магнитного сканирующего устройства томографа рядом с ногой и обеспечивая при этом защиту исследуемой конечности лошади от попадания в пазы подиума. Установка может включать в себя тележку для перемещения магнитного сканирующего устройства в пазы подиума и из них по вертикали, а также в самих пазах и вне их по горизонтали. В предпочтительном варианте осуществления тележка или каретка включает средства для перемещения магнитного сканирующего устройства вдоль трех ортогональных осей. Средства для перемещения магнитного сканирующего устройства МРТ могут включать электродвигатели или гидравлику. В подиум могут быть вмонтированы три подвижных элемента, любая пара смежных элементов из которых может быть подвижной, чтобы открывать пару пазов подиума для размещения полюсов магнитного сканирующего устройства на противоположных сторонах от исследуемой ноги, опирающейся на элемент подиума между парой пазов. Предпочтительно, чтобы подвижные элементы подиума были установлены в подиум с возможностью скольжения вдоль взаимно параллельных направляющих, образованных в неподвижных элементах подиума вдоль противоположных сторон пазов. Магнитное сканирующее устройство при этом может быть размещено в любой паре смежных открытых пазов на противоположных сторонах конечности, опирающейся на участок подиума между соответствующей парой пазов. Подиум может быть оборудован средствами смещения подвижных элементов, такими, например, как пружины, для возврата подвижных элементов пола в положение, в котором пазы подиума закрываются при выведении магнитного сканирующего устройства из них. Подиум и его подвижные элементы изготовлены из немагнитных материалов, не нарушающих при перемещениях подвижных элементов подиума характер магнитного поля в рабочей зоне получения изображения.
Преимущество использования данного варианта защиты конечности лошади заключается в том, что он позволяет сканировать обе передние ноги лошади, сменяя исследуемую конечность без перестановки самой лошади на подиуме. На практике, однако, такое решение не нашло применения из-за редко возникающей необходимости проведения исследования двух конечностей в одном цикле обследования, повышенных при этом требованиях к диапазону поперечного перемещения магнита и сложной механики устройства.
В описании изобретения sMRI отсутствует пояснение принципа управления подвижными элементами подиума при необходимости опустить магнит в пазы подиума, перекрытые ими под магнитом. Таким образом, МРТ sMRI в описанном в изобретении варианте может быть использован только для исследования дистальных отделов конечности лошади, при которых полного выведения магнита из пазов в подиуме не происходит, а подвижные элементы, упираясь в полюса магнита за счет действия прижимных пружин, перемещаются при его движении вместе с ним.
На практике, в промышленной реализации изобретения ближайшего аналога - МРТ sMRI, используется схема защиты с двумя подвижными крышками пазов подиума и полуавтоматической схемой управления их перемещением, в которой крышки под действием прижимных пружин постоянно упираются в полюса погруженного в отверстия фальшпола магнита и потому, при необходимости возвращения в отверстия фальшпола выведенного вверх из фальшпола магнита, оператор вынужден вручную, одновременно отводить обе крышки, открывая пазы подиума и удерживать крышки под собственным весом, стоя на них ногами до окончания спуска магнита. Данная схема защиты не эргономична в применении и увеличивает общее время обследования, поскольку для ее использования лошадь должна быть удалена с рабочего места томографа. Кроме того, данная схема защитного перекрытия технологического проема не исключает возможности возникновения аварийных ситуаций из-за ошибок, связанных с человеческим фактором в управлении.
В отличие от ближайшего аналога, предлагаемое настоящим изобретением управляемое устройство перекрытия технологического проема фальшпола, предназначенного для размещения полюсов мобильного магнита имеет автоматическое исполнение, не требующее непосредственного участия оператора томографа для выполнения операций перекрытия проема, что при настройке рабочего положения магнита относительно отдела исследуемой конечности стоящей лошади допускает ее размещение на рабочем месте проведения исследования. В качестве дополнительного преимущества предлагаемого решения следует отметить сокращение с его применением общего времени проведения обследования из-за меньшего числа требуемых перестановок лошади на рабочем месте. К тому же, благодаря автоматическому характеру его функционирования длина технологического проема фальшпола может быть выполнена короче по сравнению с пазом подиума ближайшего аналога не менее, чем на 20 см, что, в свою очередь позволяет укоротить и облегчить защитные крышки, снижая требуемое для их перемещения усилие и улучшая эргономику и безопасность рабочего места процедурного помещения кабинета МРТ.
Задачей изобретения является обеспечение безопасности лошади, размещаемой в стоячем положении для проведения диагностического обследования ее конечностей на рабочем месте МРТ, оборудованном с использованием мобильного магнита с управляемым автоматически устройством перекрытия технологического проема фальшпола.
Технический результат заявленного изобретения заключается в автоматическом управлении устройством перекрытия технологического проема фальшпола при движении мобильного магнита ветеринарного ортопедического МРТ с возможностью настройки скорости перемещения защитных крышек проема.
Согласно изобретению, устройство перекрытия технологического проема фальшпола представляет собой сборную конструкцию, включающую по крайней мере подвижную защитную крышку, механически связанную с мобильным магнитом томографа, управляющим ее перемещением, движение которого при настройке его рабочего положения обеспечивается, в свою очередь, механическими, электромеханическими, пневматическими или гидравлическими приводами перемещения магнита вдоль осей «Х», «Y» и «Z». При движении магнита в процессе настройки его рабочего положения относительно исследуемого отдела конечности, полюса магнита перемещаются либо в технологическом проеме рабочего места фальшпола, на котором стоит обследуемая лошадь, либо над ним. При этом, освобождающиеся при выдвижении из технологического проема полюсов магнита участки проема автоматически перекрываются подвижной крышкой, связь которой с магнитом обеспечивается приводом, состоящим из троса, роликовых передач, регулировочного талрепа и возвратной пружины, где трос одним концом присоединен к крепежной планке на верхней грани перемычки ярма магнита, а другим концом - к узлу крепления на дальней от магнита нижней стороне подвижной защитной крышки, при этом трос проходит через три роликовых блока, первый из которых прикреплен через талреп к вертикальной стойке подвижной рамы магнита, второй блок - к нижней части подвижной рамы, а третий блок присоединен к ближнему к магниту краю опорной конструкции фальшпола напротив направляющих пазов под каналом перемещения защитной крышки, причем пружина, входящая в состав указанной механической связи, присоединена одним концом к узлу крепления, общему с креплением троса на дальней от магнита нижней стороне подвижной крышки, а другим концом - к узлу крепления на обратной, дальней от магнита стороне фальшпола.
Благодаря возможности с использованием регулировочный талреп привода настроить рабочую скорость перемещения подвижной крышки при вертикальных перемещениях магнита, предлагаемое устройство перекрытия обеспечивает постоянное сохранение безопасного для лошади зазора между крышкой и полюсами магнита в автоматическом режиме на протяжении всего обследования, причем без прямого контакта крышки с полюсами.
Фальшпол и подвижная крышка устройства перекрытия выполнены из материалов, не имеющих магнитных свойств и с прочностными характеристиками, необходимыми для использования при обследовании лошадей любой породы.
Практическое применение нашло устройство перекрытия, использующее две облегченные подвижные крышки, перекрывающие независимо друг от друга два участка технологического проема - левый и правый, предназначенные для размещения в них, соответственно, левого и правого полюсов мобильного U-образного магнита, при этом привод каждой из крышек устройства перекрытия выполнен в полном соответствии с приведенным выше описанием схемы с одной крышкой.
Предлагаемое решение иллюстрируют следующие материалы.
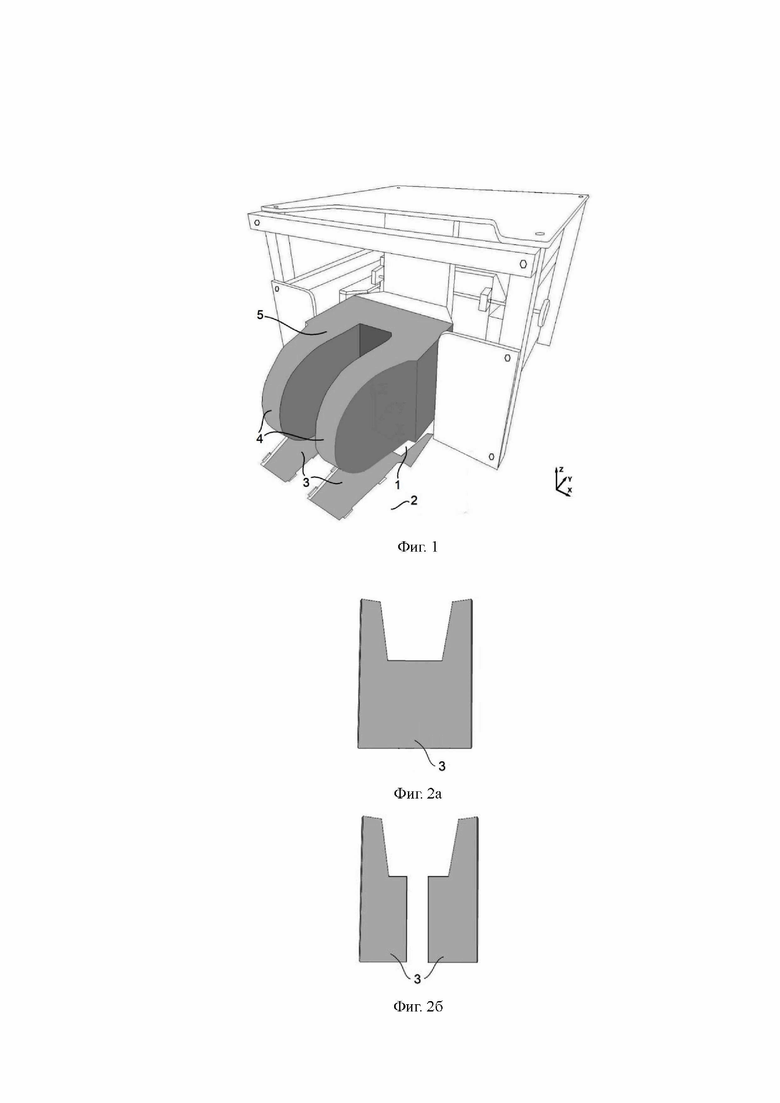
Фиг. 1 - изображено рабочее место МРТ для исследования конечностей стоящей лошади с технологическим проемом фальшпола в конечной фазе его перекрытия подвижной крышкой;
Фиг. 2а - представлен вид общей подвижной крышки перекрытия технологического проема фальшпола;
Фиг. 2б - представлен вид двух отдельных подвижных крышек сегментов технологического проема фальшпола;
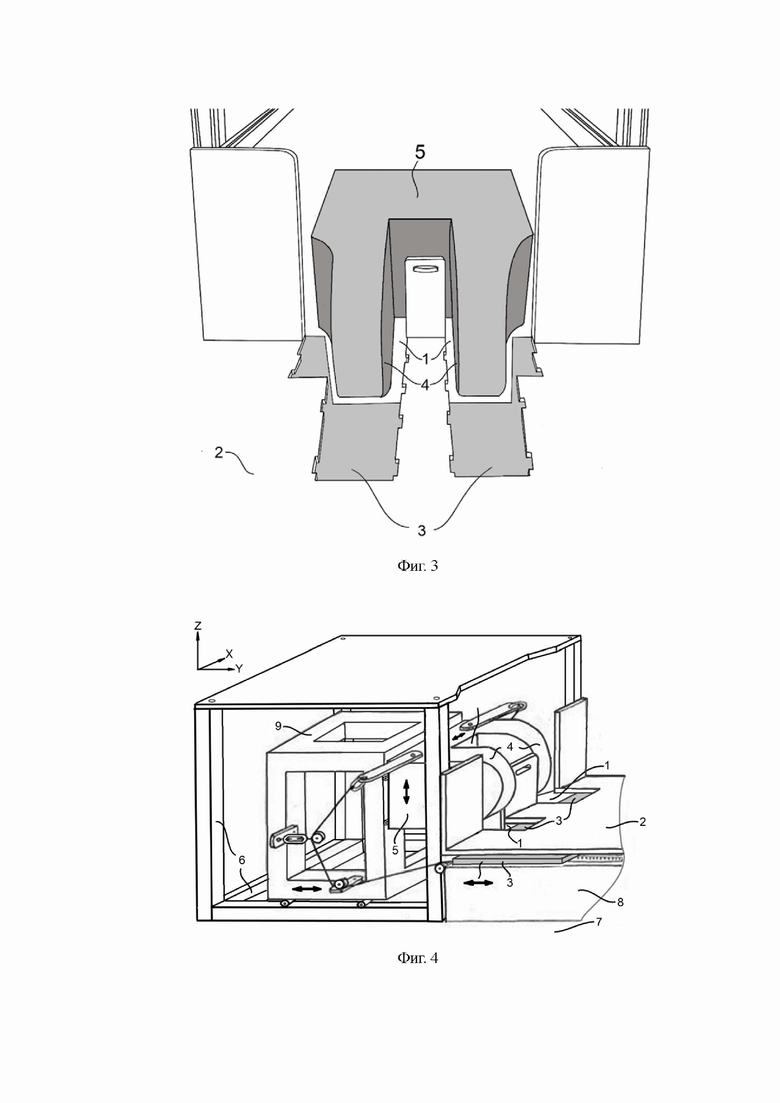
Фиг. 3 - изображено рабочее место МРТ для исследования конечностей стоящей лошади в фазе частичного перекрытия технологического проема фальшпола подвижными крышками с частичным погружением магнита в проем;
Фиг. 4 - представлена схема функционирования устройства перекрытия технологического проема фальшпола с указанием подвижных элементов устройства;
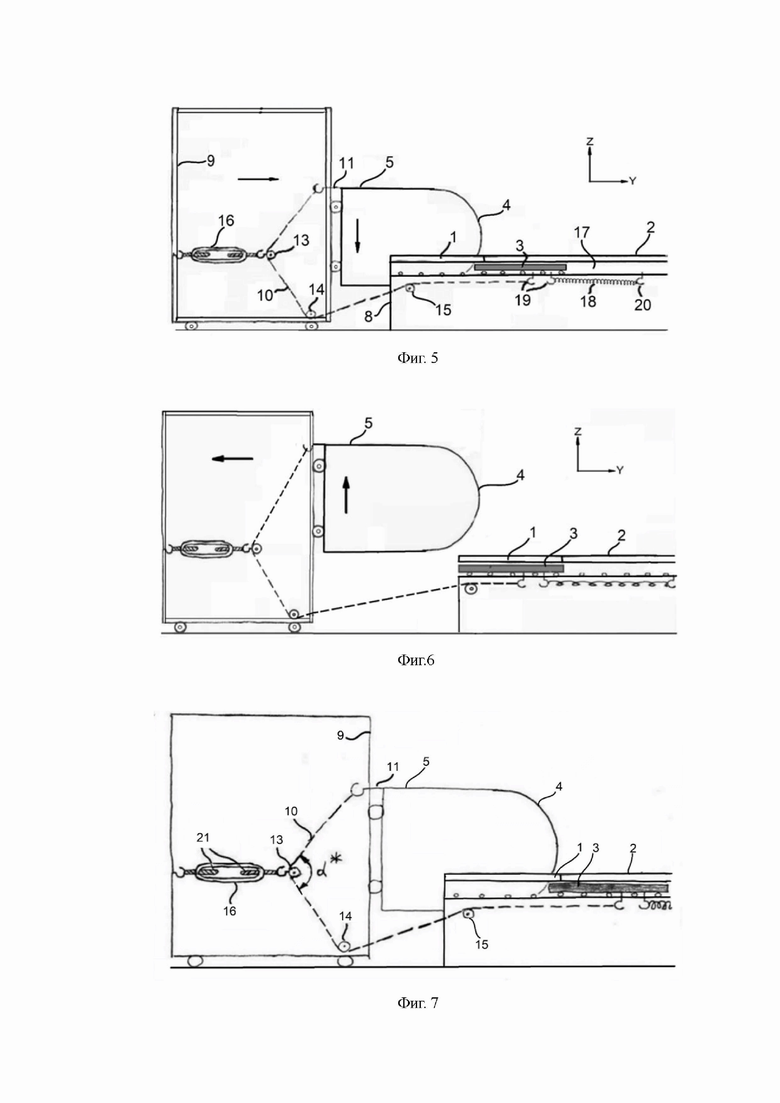
Фиг. 5 - представлена упрощенная схема устройства перекрытия технологического проема с заведенным в проем мобильным магнитом;
Фиг. 6 - показано взаимное расположение элементов устройства перекрытия технологического проема с выведенным из проема мобильным магнитом;
Фиг. 7 - представлена схема привода подвижной крышки устройства перекрытия технологического проема с узлом регулировки скорости перемещения крышки;
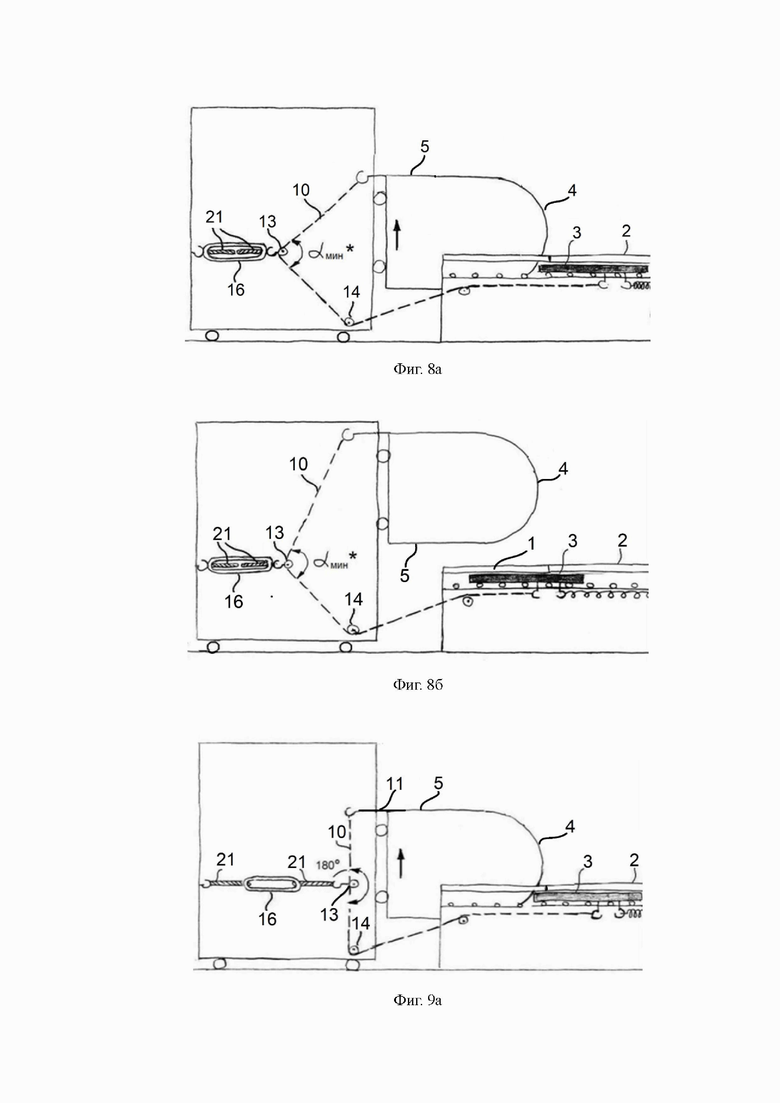
Фиг. 8а - представлено начальное взаимное расположение элементов устройства перекрытия технологического проема при размещении магнита в проеме и минимальным значением угла регулирования αмин*;
Фиг 8б - представлено конечное взаимное расположение элементов устройства перекрытия технологического проема при полном выведении магнита из проема и минимальным значением угла регулирования αмин*;
Фиг. 9а - представлено начальное взаимное расположение элементов устройства перекрытия технологического проема при размещении магнита в проеме и максимальным значением угла регулирования α*макс= 180°;
Фиг 9б - представлено конечное взаимное расположение элементов устройства перекрытия технологического проема при полном выведении магнита из проема и максимальным значением угла регулирования α*макс= 180°;
Фиг. 10а - представлено начальное взаимное расположение элементов устройства перекрытия технологического проема при размещении магнита в проеме и оптимальным рабочим значением угла регулирования αраб*;
Фиг 10б - представлено конечное взаимное расположение элементов устройства перекрытия технологического проема при полном выведении магнита из проема и оптимальным рабочим значением угла регулирования αраб*.
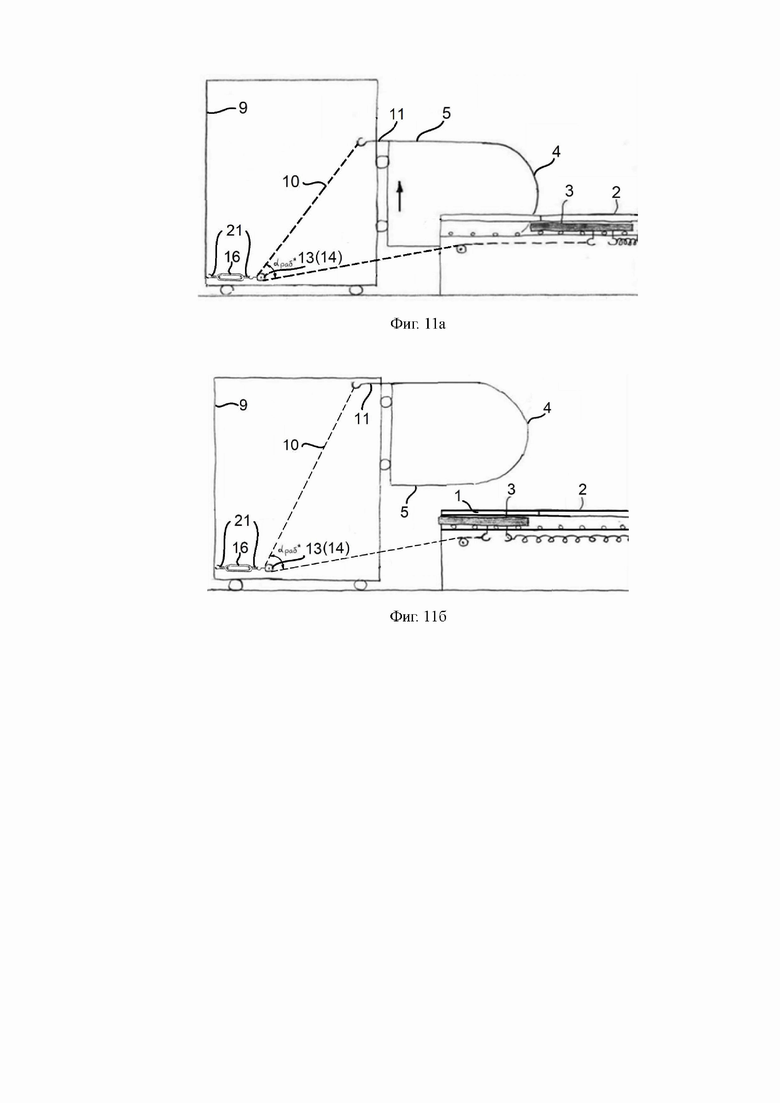
Фиг. 11а - представлено начальное взаимное расположение элементов устройства перекрытия технологического проема при переносе узла настройки рабочего значения угла αраб* и размещении магнита в проеме;
Фиг 11б - представлено конечное взаимное расположение элементов устройства перекрытия технологического проема при переносе узла настройки рабочего значения угла αраб* и полном выведении магнита из проема.
На фиг. 1 представлено рабочее место МРТ для исследования конечностей стоящей лошади, оснащенное связанным с мобильным магнитом томографа устройством перекрытия технологического проема (1) фальшпола (2) рабочего места МРТ с подвижной защитной крышкой (3) в конечной фазе перекрытия проема (1) при максимальном удалении полюсов (4) магнита (5) вверх от фальшпола (2) по оси «Z». Для организации перекрытия проема (1) фальшпола (2) при выводе из него полюсов (4) мобильного магнита (5) в процедурном помещении ортопедического МРТ предлагается техническое решение, при котором процесс управления перемещением защитных крышек (3) проема (1) механически увязан и синхронизируется автоматически с движением мобильного магнита (5) магнитной системы томографа, перемещение которого, в свою очередь, обеспечивается механическими, электромеханическими или пневмоприводами и может представлять собой комбинацию, включая одновременно исполняемую, передвижения магнита по всем трем осям приведенной на фиг.1 системы координат.
На фиг. 2а и фиг. 2б представлены два варианта выполнения подвижной крышки устройства перекрытия. Вариант, представленный на фиг. 2а выполнен в виде единой конструкции, обеспечивающей при перемещении под покрытием фальшпола одновременное перекрытие как левого, так и правого сегментов технологического проема. На фиг. 2б представлен предпочтительный вариант исполнения крышки (3) перекрытия в виде двух отдельных, облегченных, зеркально-симметричных левой и правой подвижных крышек (3) для перекрытия, соответственно - левого и правого сегментов технологического проема (1), причем этот вариант будет использован ниже для пояснения принципа управления перекрытием. Все варианты исполнения подвижных крышек системы перекрытия требуют использования магнитонейтральных материалов при их изготовлении ввиду их функционирования в непосредственной близости от мобильного магнита томографа.
На фиг. 3 представлено рабочее место МРТ для исследования конечностей стоящей лошади с подвижными защитными крышками (3) в фазе перекрытия технологического проема (1) фальшпола (2) при погружении полюсов (4) магнита (5) в проем (1) для случая проведения исследования дистальных отделов конечности лошади таких, например, как копыто. Зазор между подвижными крышками (3) и полюсами (4) погруженного в технологический проем (1) магнита (5), приводящего крышки (3) в движение, составляет не более 3 см, что делает невозможным попадание копыта лошади в технологический проем (1) фальшпола (2).
На фиг. 4 представлена упрощенная схема функционирования устройства перекрытия технологического проема с указанием подвижных элементов устройства. Основным силовым элементом магнитной системы ортопедического томографа, имеющим в своем составе мобильный магнит (5), является сборная конструкция неподвижной несущей рамы (6), прикрепленной к полу (7) процедурного помещения, вертикальные стойки которой могут быть соединены для упрочения конструкции с опорой (8) устройства перемещения защитных крышек (3) технологического проема (1) фальшпола (2).
Внутри неподвижной рамы (6) магнитной системы томографа смонтирована подвижная несущая рама (9) мобильного магнита (5), способная перемещаться внутри неподвижной рамы (6) вдоль осей «Y» и «Z» с помощью электромеханических приводов и, в небольшом диапазоне, по оси «Х» - за счет ручного привода с винтовой передачей.
При настройке положения магнита (5) относительно исследуемой конечности лошади, освобождаемый им при движении технологический проем (1) фальшпола (2) перекрывается в автоматическом режиме двумя подвижными крышками (3), перемещение которых выполняется благодаря их механической связи с движущимся магнитом (5), которая представляет собой привод, состоящий из троса, роликовых передач, регулировочного талрепа и возвратных пружин, функционирование которого в разных фазах перемещения мобильной несущей рамы (9) магнита (5) и самого магнита (5) относительно несущей рамы (9) показано в приведенных ниже описаниях упрощенных схем функционирования привода.
На фиг. 5 представлена упрощенная схема привода устройства перекрытия технологического проема (1), на которой дан вид на одну из двух зеркально симметричных по исполнению защитных крышек (3), приводы перемещения которых настраиваются независимо друг от друга, обеспечивая перекрытие каждой из них своей части технологического проема (1) фальшпола (2) при движении одного из двух полюсов (4) магнита (5) в соответствующей части проема (1). Представленное на фиг. 5 изображение демонстрирует взаимное расположение элементов системы, соответствующее максимальному погружению полюсов (4) магнита (5) в технологический проем (1) фальшпола (2) с одновременным предельным заведением магнита (5) в проем (1) по оси «Y».
Новизна перекрытия технологического проема (1) фальшпола (2) состоит в использовании для перемещения защитных крышек (3) движения магнита (5) томографа без прямого контакта магнита (5) с крышками (3) и без необходимости участия оператора МРТ в обеспечении перекрытия проема (1). Конструкцией устройства предполагается присоединение троса (10) одним концом - к крепежной планке (11) на верхней грани перемычки ярма магнита (5), а другим концом - к узлу крепления (12) на дальней от магнита (5) нижней стороне крышки (3). При этом трос (10) проходит через 3 роликовых блока (13, 14, 15). Первый блок (13) из них прикреплен через регулировочный талреп (16) к вертикальной стойке подвижной рамы (9), второй блок (14) - к нижней части подвижной рамы (9), а третий блок (15) - к ближнему к магниту (5) краю опорной конструкции (8) фальшпола (2) напротив направляющих пазов (23) под каналом перемещения подвижных крышек (17).
Первый роликовый блок (13) предназначен для регулировки скорости перекрытия технологического проема (1) при перемещении магнита (5) по вертикали, т.е. - по оси «Z».
Второй ролик (14) меняет направление прохождения троса (10) от первого ролика (13) к третьему (15), а также участвует в схеме регулировки скорости перекрытия технологического проема (1). Третий ролик (15), закрепленный на ближнем к магниту (5) крае опорной конструкции (8) фальшпола (2), предназначен для изменения направления подачи троса (10) привода к крышке (3) на соосное ее направлению движения. Постоянное натяжение троса (10) обеспечивается осевым, в направлении движения крышки (3), противодействием напряженной пружины (18), присоединенной одним концом к узлу крепления (19), общему с креплением троса (10) на дальней от магнита (5) нижней стороне крышки (3), а другим концом - к узлу крепления (20) на обратной стороне фальшпола (2), выполненному на значительном удалении от магнита (5), достаточном для удержания пружины (18) в напряженном состоянии во всем диапазоне перемещения крышки (3).
Таким образом, как показано на фиг. 6, горизонтальное перемещение магнита (5) приводит к синхронному перемещению вслед за ним крышки (3), перекрывающей освобождаемый соответствующим полюсом (4) магнита (5) сегмент технологического проема (1) вплоть до полного его перекрытия, которое выполняется при максимальном удалении магнита (5) из проема (1) по оси «Y» с одновременным максимальным его подъемом по оси «Z».
При одновременном перемещении подвижной рамы (9) с магнитом (5) вдоль оси «Y» и магнита (5) по подвижной раме (9) вдоль оси «Z» может возникнуть ситуация с чрезмерной скоростью движения защитных крышек (3) относительно магнита (5), при которой возможно их столкновение.
Для настройки скорости перекрытия технологического проема (1) для всех возможных комбинаций движения мобильных элементов магнитной системы устройство перекрытия оснащено узлом регулировки скорости с использованием талрепа (16), позволяющего изменять длину вертикального участка троса (10) между крепежной планкой (11) и роликовым блоком (14) привода крышки (3) а с изменением длины изменяющего и скорость перемещения крышки (3).
На фиг. 7, на примере одной из двух, выполненных зеркально-симметрично друг другу, частей устройства перекрытия технологического проема (1) фальшпола (2) показана схема настройки скорости движения защитной крышки (3) при перемещении магнита (5) томографа по вертикали, дающая возможность изменения скорости движения крышки (3) за счет регулировки положения натяжного роликового блока (13) приводного троса (10), определяющего геометрию его хода от крепежной планки (11) на верхней грани перемычки ярма магнита (5) к ролику (14). Изменение скорости движения крышки (3) при этом достигается изменением собственной длины талрепа (16) вращением его тела вокруг шпилек крепления (21), что приводит к управляемому отклонению вертикальных участков приводного троса (10) крышки (3) от вертикали и образованию между ними регулируемого угла α*.
Благодаря применению системы роликовых блоков в схеме укладки тросовой тяги (10) привода защитной крышки (3) обеспечивается автоматическое ее перемещение с переменной скоростью, зависящей от комбинации скоростей горизонтального и вертикального движения магнита (5), причем скорость перемещения крышки (3) при вертикальном движении магнита (5) увеличивается по мере его подъема с изменением угла α* и обеспечивает ускоряющееся заведение крышки (3) в проем (1) при выходе магнита (5) из фальшпола (2), в соответствии с нарастающей скоростью увеличения размера проема (1) из-за круглого профиля полюсов (4) магнита (5). Скорость Vк движения крышки (3) в сторону магнита (5) вычисляется в соответствии с формулой:
Vк = Vр + sin(α*/2)Vм/р (1)
где: Vк - скорость движения крышки;
Vр - скорость перемещения подвижной рамы (9) в сторону от технологического проема (1) фальшпола (2);
Vм/р - скорость движения магнита (5) вверх относительно подвижной рамы (9).
При вычислении результирующей скорости Vк движения защитных крышек (3) технологического проема (1) следует учитывать знак векторов скорости, участвующих в вычислениях. Так, при движении магнита (5) вниз по подвижной раме (9), слагаемое Vм/р в формуле должно изменить знак на отрицательный.
При указанных в формуле (1) направлениях движения элементов системы минимальная скорость движения крышек (3) соответствует минимальному углу регулирования αмин* (фиг. 8а). Минимальный угол регулирования αмин* в свою очередь задается диапазоном встречного перемещения в теле талрепа (16) регулировочных шпилек (21) вплоть до их смыкания.
При этом, при перемещении магнита (5) в верхнее положение, технологический проем (1) фальшпола (2) не будет перекрыт крышкой (3) полностью по всей длине, а промежуточные положения перекрытия проема (1) в процессе подъема магнита (5) будут не полными (фиг. 8б).
При увеличении угла регулирования α* до α*макс= 180°, что соответствует вертикальному расположению приводного троса (10) на участке от крепежной планки (11) на верхней грани перемычки ярма магнита (5) до нижнего ролика (14), скорость движения крышки (3) максимальна (фиг. 9а).
При этом весьма вероятно ее столкновение с магнитом (2) уже в начале его перемещения вверх и излишне быстрым сближением крышки (3) со скруглением полюса (4) магнита (5), поднимающегося из технологического проема (1) фальшпола (2). Кроме того, защитная подвижная крышка (3) в верхнем положении магнита (5) займет нештатное положение с вылетом за край фальшпола (2) (фиг. 9б).
На фиг. 10а и фиг. 10б показано оптимальное положение натяжного ролика (13) троса (10) привода подвижной крышки (3), при котором угол регулирования αраб* обеспечивает безопасное перекрытие крышкой (3) технологического проема (1) фальшпола (2) с полным штатным его перекрытием от нижнего до верхнего положения магнита (5).
Следует отметить, что при перемещении магнита (5) в верхнее положение из нижнего, скорость перемещения подвижной крышки (3) нарастает в связи с постоянным увеличением угла αраб* благодаря чему обеспечивается постоянное перекрытие освобождаемого магнитом (5) технологического проема (1) фальшпола (2). При регулировке αраб* следует учесть, что в начале движения, при меньшей скорости, крышка (3) движется, ускоряясь вблизи скругления полюса (4) магнита (5), а после выведения магнита (57) из проема, движение крышки (3) ускоряется с увеличением угла αраб*, что и требуется для сохранения постоянным перекрытия ею проема (1) фальшпола (2). Регулировка αраб* состоит в обеспечении такой начальной скорости движения крышки (3), которая обеспечит бесконтактное сопровождение ею удаляющегося из проема магнита (5) с сохранением зазора шириной около 3 см с ним вплоть до вывода его выше уровня фальшпола (2).
Переменная, зависящая от выбора значения угла αраб*, скорость движения защитных крышек (3) технологического проема (1) фальшпола (2) является важной особенностью предлагаемой конструкции. Возможным рабочим вариантом регулировки скорости перемещения подвижных крышек (3) сегментов технологического проема (1) фальшпола (1) является сохранение схемы прикрепления троса (10) привода крышек (3) с переносом регулирующего угол α* роликового блока (13) на нижнюю грань подвижной несущей рамы (9) магнита (5) и с одновременным удалением роликового блока (14), поскольку его функцию начнет выполнять перенесенный блок (13) (фиг. 11а). В этом случае настройка αраб* выполняется за счет изменения позиции установки роликового блока (13) на нижней грани несущей рамы (9) и будет зависеть от удаления роликового блока (13) от мобильного магнита (5). Этот вариант исполнения проще реализуем, но при выборе его для использования следует учесть, что он обеспечивает вдвое меньший диапазон настройки скорости перемещения крышек (3) при движении магнита (5) по вертикали (фиг. 11б), чем вариант с использованием прикрепления натяжного ролика (13) с талрепом (16) к средней точке вертикального участка троса (10) привода крышки (3) с регулировкой скорости (фиг. 10б).
Для выполнения регулировки талрепами (16) скорости движения крышек (3) следует при монтаже приводов крышек (3) размещать блок ролика (13) так, чтобы длины участков троса (10) над роликом (13) и между роликами (13) и (14) были близкими по величине, что максимально расширяет диапазон настройку скорости движения крышек (3), поскольку она становится наиболее чувствительна при этом к изменению угла α*, что обеспечивает максимальный диапазон регулирования αраб*.
Предлагаемое в изобретении регулирование скорости перемещения подвижных крышек (3) позволяет так синхронизировать их перемещение с комплексным, по вертикали и горизонтали движением магнита (5), что при его движении, в том числе и после размещения лошади на рабочем месте томографа, зазор между крышками (3) фальшпола (2) и полюсами (4) магнита (5), а также не перекрытые крышками (3) участки проема (1) остаются не превышающими в размере 3 см, не позволяя попасть в проем конечностям лошади при возможном ее тревожном поведении, что исключает ее травматизацию.
Благодаря предложенной конструкции защитное перекрытие технологического проема фальшпола происходит автоматически, синхронно с движением магнита за счет постоянного примыкания подвижной крышки к полюсам мобильного магнита без непосредственного контакта с ними, исключая всякую возможность их столкновения с магнитом
При использовании устройства защитного перекрытия технологического проема фальшпола обеспечивается визуально контролируемая, непреодолимая лошадью защита от попадания ее конечностей в технологический проем фальшпола, служащий для размещения в нем магнитных полюсов мобильного магнита во всех фазах обследования, включая фазу настройки рабочего положения полюсов магнита относительно исследуемой конечности лошади, сопровождающуюся его движением.
Автоматический характер привода защитных крышек при всех возможных рабочих вариантах движения магнита исключает влияние на безопасность исследования ошибок оператора, связанных с человеческим фактором в управлении, обеспечивая постоянную защиту обследуемой лошади от попадания ее конечностей в технологический проем фальшпола.
| название | год | авторы | номер документа |
|---|---|---|---|
| Защитный барьер ортопедического МРТ для исследования конечности лошади в стоячем положении | 2024 |
|
RU2840185C1 |
| Каркас юрты | 2023 |
|
RU2814413C1 |
| УСТРОЙСТВО ТОКОСЪЕМА ДЛЯ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 1991 |
|
RU2025313C1 |
| Способ сооружения каркаса юрты | 2023 |
|
RU2818612C1 |
| РОЛИКОВОЕ СРЕДСТВО ПЕРЕДВИЖЕНИЯ | 2019 |
|
RU2745724C2 |
| Укрытие судового люка | 1989 |
|
SU1659288A1 |
| СИСТЕМА ЗАГРУЗКИ ШАХТНОЙ ПЕЧИ | 1992 |
|
RU2023010C1 |
| Платформа для производства работ внутри доменной печи | 1990 |
|
SU1747624A1 |
| ЗАМОК ДЛЯ ЗАПИРАНИЯ КРЫШЕК И ДВЕРЕЙ ТРАНСПОРТНЫХ СРЕДСТВ | 2008 |
|
RU2379456C2 |
| Устройство для защиты от атмосферных осадков открытого судового грузового люка при производстве грузовых операций | 1978 |
|
SU765100A1 |

Использование: для неинвазивной диагностической визуализации патологий конечностей лошадей в стоячем положении. Сущность изобретения заключается в том, что мобильный магнит ветеринарного ортопедического МРТ с управляемым устройством перекрытия технологического проема фальшпола представляет собой по крайней мере одну расположенную в проеме фальшпола подвижную защитную крышку проема, механически связанную с мобильным магнитом, выполненным с возможностью размещения в технологическом проеме. При этом подвижная крышка связана с мобильным магнитом томографа приводом, состоящим из троса, роликовых передач, регулировочного талрепа и натяжной пружины, обеспечивающим автоматическое перекрытие освобождающихся при движении мобильного магнита участков технологического проема без прямого контакта подвижной крышки с магнитом. Технический результат: обеспечение возможности автоматического управления устройством перекрытия технологического проема фальшпола при движении мобильного магнита ветеринарного ортопедического МРТ с возможностью настройки скорости перемещения защитных крышек проема. 1 з.п. ф-лы, 16 ил.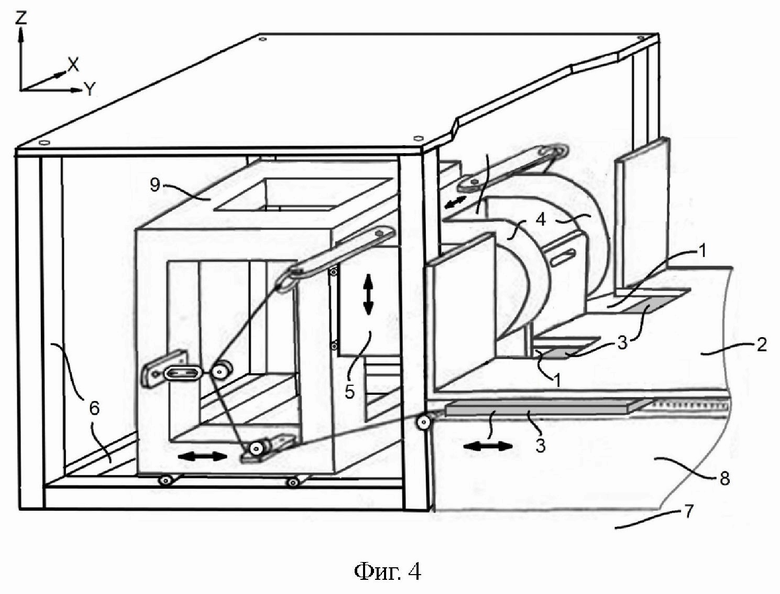
1. Мобильный магнит ветеринарного ортопедического МРТ с управляемым устройством перекрытия технологического проема фальшпола рабочего места томографа, представляющим собой по крайней мере одну расположенную в проеме фальшпола подвижную защитную крышку проема, механически связанную с мобильным магнитом, выполненным с возможностью размещения в технологическом проеме, отличающийся тем,
что подвижная крышка устройства перекрытия технологического проема фальшпола связана с мобильным магнитом томографа приводом, состоящим из троса, роликовых передач, регулировочного талрепа и натяжной пружины, обеспечивающим автоматическое перекрытие освобождающихся при движении мобильного магнита участков технологического проема без прямого контакта подвижной крышки с магнитом,
причем трос одним концом присоединен к крепежной планке на верхней грани перемычки ярма мобильного магнита, а другим концом – к узлу крепления на дальнем от магнита краю нижней стороны подвижной крышки, при этом трос проходит через три роликовых блока, первый из которых прикреплен через регулировочный талреп к дальней от магнита вертикальной стойке подвижной несущей магнит рамы, второй блок крепится к ближней к магниту нижней части его подвижной рамы, а третий блок присоединен к ближнему к магниту краю опорной конструкции фальшпола под направляющим пазом канала перемещения защитной крышки, и где натяжная пружина привода подвижной крышки присоединена одним концом к узлу крепления, общему с креплением троса на дальней от магнита нижней стороне подвижной крышки, а другим концом – к узлу крепления на дальней от магнита обратной стороне фальшпола процедурного помещения томографа.
2. Мобильный магнит ветеринарного ортопедического МРТ с управляемым устройством перекрытия технологического проема фальшпола рабочего места томографа по п.1, отличающийся тем, что привод подвижной крышки устройства перекрытия проема содержит узел настройки скорости ее перемещения, выполненный с использованием регулировочного талрепа крепления первого роликового блока тросовой передачи привода, обеспечивающий при движении мобильного магнита перемещение крышки для полного перекрытия проема с постоянным ее примыканием к полюсам магнита без непосредственного контакта с ними.
| US 2005088178 A1, 28.04.2005 | |||
| US 2021063515 A1, 04.03.2021 | |||
| 0 |
|
SU236842A1 | |
| US 2021045650 A1, 18.02.2021 | |||
| СИСТЕМА ПОЗИЦИОНИРОВАНИЯ СТУПНИ ДЛЯ ИССЛЕДОВАНИЙ ПО МАГНИТНО-РЕЗОНАНСНОЙ ВИЗУАЛИЗАЦИИ | 2014 |
|
RU2676858C2 |

