Изобретение относится к области медицины и протезирования конечностей человека, моделирования отдельных частей человеческого тела. В случае реализации предлагаемого технического решения представляется возможным изготовление протеза руки человека с независимой подвижностью пальцев и ориентацией кисти за счет поворота запястья по двум осям.
Известны устройства протезов с управлением от биопотенциалов мышц (патенты №396112; №396113; №2427348). Суть биомеханических протезов состоит в том, что после ампутации культя руки сохраняет остатки имевшихся ранее хватательных мышц. При их сокращении поступает электрический импульс, воспринимаемый расположенными на коже электродами. Электронная усилительная система в электродах позволяет включать/выключать электродвигатель, осуществляющий перемещение пальцев и поворот запястья. По команде от системы управления кисть может выполнять один из нескольких запрограммированных типов захватов. Протезы позволяют осуществлять вращательные движения в кисти, захватывать и удерживать предметы.
К недостаткам вышеуказанных устройств, следует отнести то, что они имеют ограниченное число возможных передающих сигналов (обычно не более четырех), что не позволяет обеспечить необходимую подвижность предплечья, поэтому реализуется ограниченное число видов захвата и поворота запястья только по одной оси. Кроме того, большие погрешности при регистрации биопотенциалов мышц затрудняют выполнение мелких и точных движений, а в случае необходимости подготовки кожи для размещения сетки электродов увеличивается время установки и подключения протеза.
Наиболее близким к заявленному протезу по принципу управления является протез руки, управляемый движением ключицы (патент РФ №2068246, «Многофункциональный активный протез руки», 2013 г..) В материалах этого патента описывается протез, который крепится на специальный наплечник, внутри которого размещены датчики перемещения ключицы в трех плоскостях, сигналы с которых используются для управления локтевым суставом и поворота запястья по двум осям. Управление захватом кисти осуществляется от биопотенциалов оставшихся мышц плеча. Кисть имеет одну степень свободы. Недостатками указанного выше протеза руки являются отсутствие управления отдельными пальцами и невозможность одновременной ориентации кисти и движение плеча, что затрудняет позиционирование протеза в пространстве.
Сущность же заявленного изобретения заключается в том, что протез кисти руки, выполненный с возможностью, крепления на культю предплечья посредством обхвата, содержит подвижные пальцы и оснащен дистанционным механизмом управления движениями пальцев и поворота кисти. Пальцы протеза кисти выполнены в виде подпружиненных звеньев (имитации фаланг пальцев) с механическими тягами, соединенными с расположенными в запястье дистанционно управляемыми сервоприводами тяг и механизмом поворота кисти. Дистанционное управление включает в себя восемь сенсорных датчиков управляющих сигналов, микроконтроллеры, приемопередатчики (трансиверы) и источники электропитания, причем датчики расположены в двухслойной стельке обуви, четыре датчика из которых являются управляющими разгибанием пальцев протеза кисти и встроены в верхнем слое стельки в зоне движения пальцев ноги, а четыре других датчика управления поворотом кисти в запястье размещены по бокам нижнего слоя стельки, в зоне пятки стопы и в зоне подушечки стопы, также в стельке в зоне свода стопы размещены микроконтроллер, приемопередатчик и питающая их батарейка, кроме того, в протезе кисти руки расположены электрический аккумулятор, приемопередатчик и микроконтроллер, который связан с сервоприводом тяг и механизмом поворота кисти посредством многоканального проводного кабеля культе.
Устройство заявленного протеза представлено на следующих фигурах:
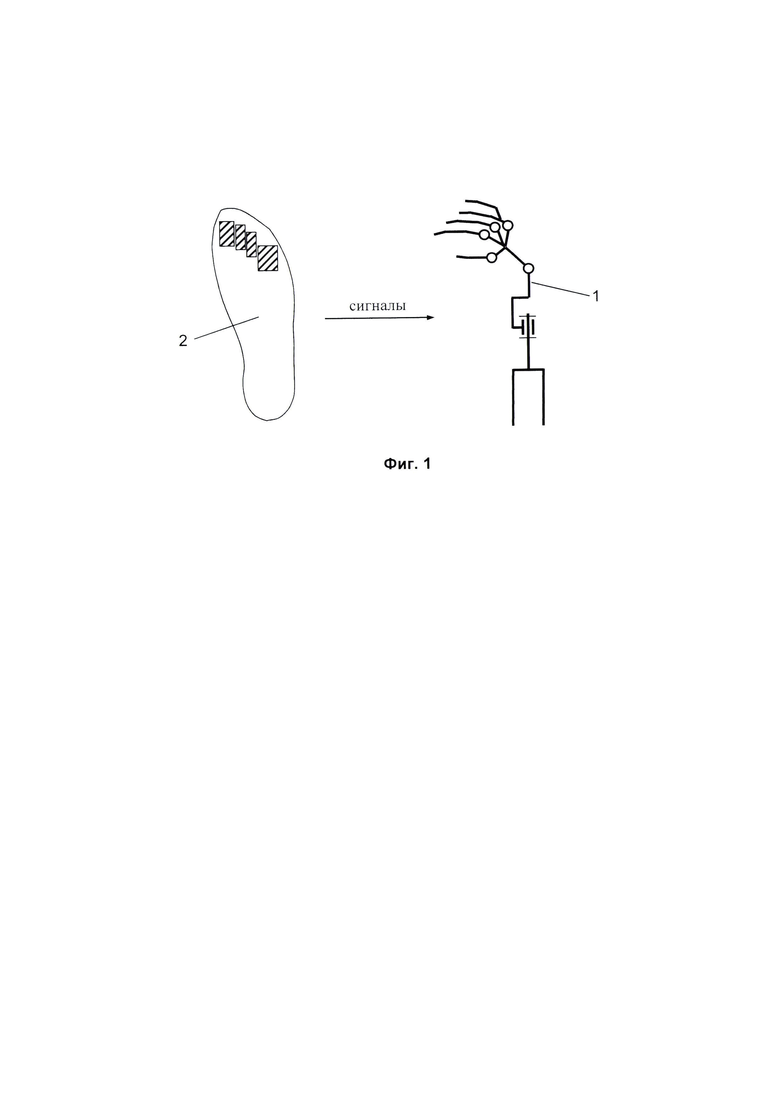
фиг. 1 - Принципиальная схема управления протезом предплечья;
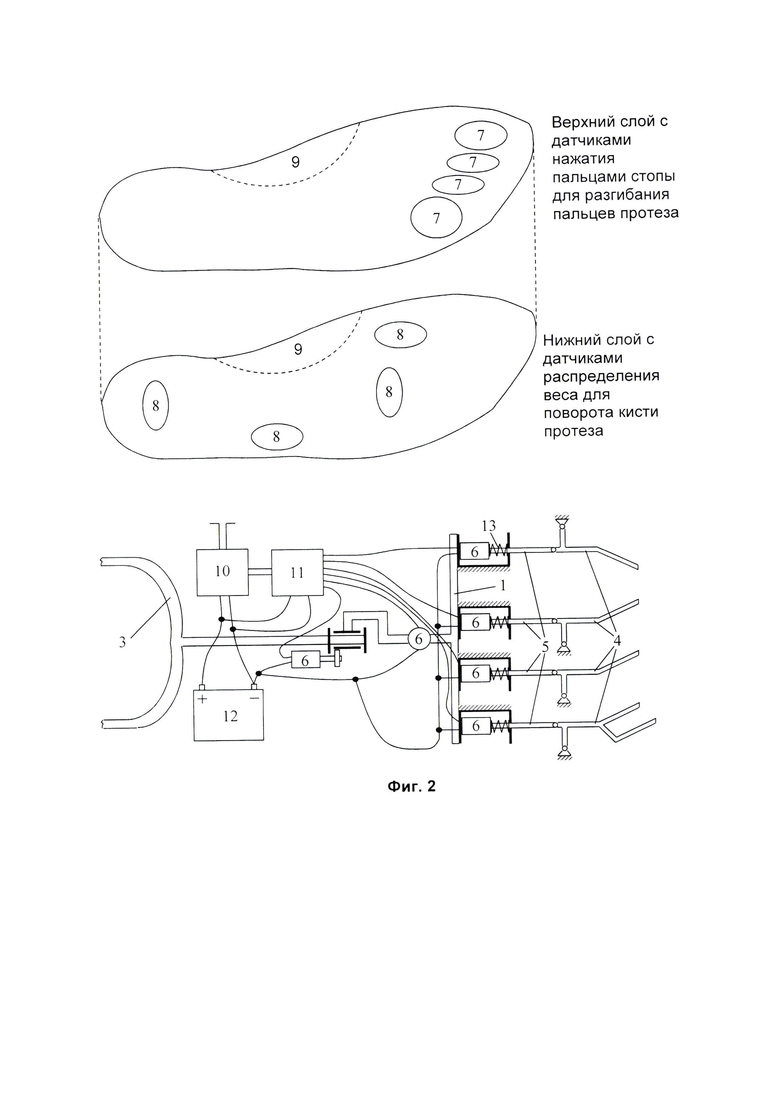
фиг. 2 - Стелька двухслойная и протез предплечья;
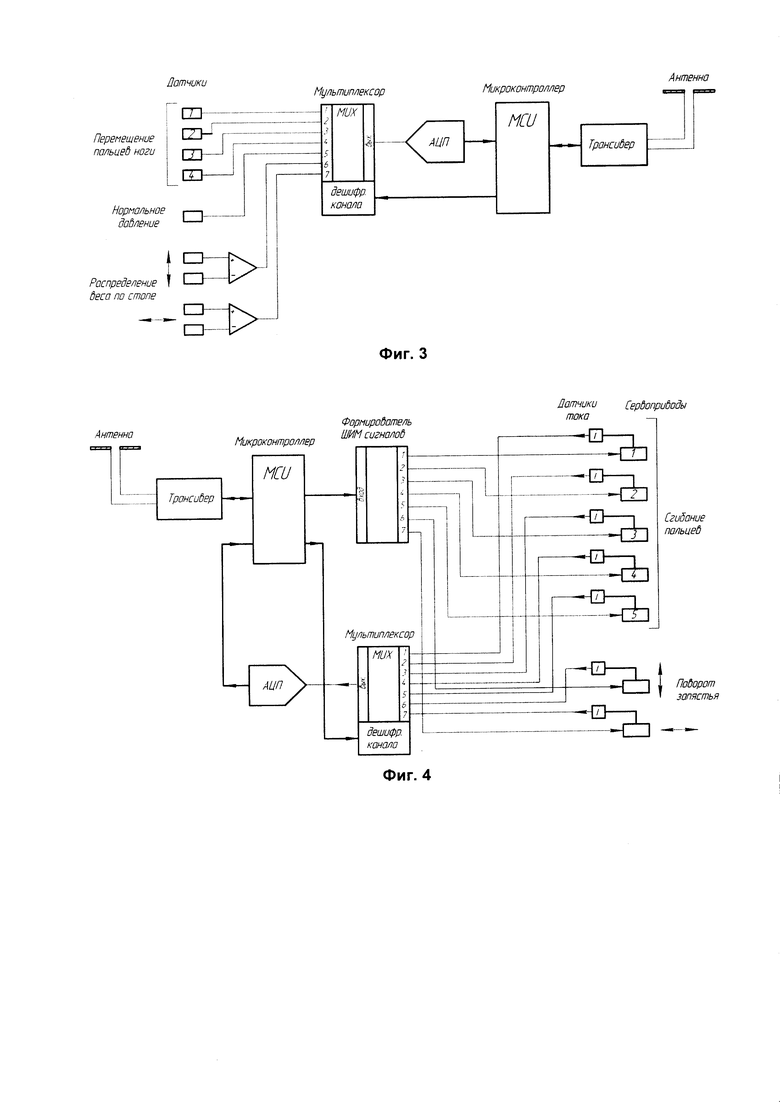
фиг. 3 - Схема управляющей стельки;
фиг. 4 - Схема управляемого протеза предплечья;
фиг. 5 - Общий вид опытной системы;
фиг. 6 - Управляющая стелька, опытный образец
Устройство управляемого протеза кисти руки представляет собой протез кисти руки 1 (фиг. 1) с подвижными запястьем и пальцами, управляемыми от стельки 2, надет на культе предплечье руки с помощью обхвата 3. (фиг. 2.) Пальцы протеза кисти выполнены в виде подпружиненных звеньев-фаланг 4 и оснащены механическими тягами 5, которые соединены с расположенными в кисти, дистанционно управляемыми сервоприводами 6 тяг и расположенными в запястье сервоприводами поворота и наклона кисти. Дистанционное управление состоит из сенсорных датчиков 7 и 8 управляющих сигналов, микроконтроллера, приемопередатчика в стельке и плоской батарейки.
Датчики расположены в двухслойной стельке 2 обуви таким образом, что четыре датчика 7 из восьми, которые являются управляющими сгибанием пальцев протеза кисти, встроены в верхнем слое стельки 2 в зоне движения пальцев ноги, а четыре других датчика 8 управления поворотом кисти в запястье размещены по бокам нижнего слоя стельки 2 в зонах пятки и подушечки стопы, также в стельке 2 в зоне свода стопы 9 размещены микроконтроллер, приемопередатчик (трансивер) и питающая их плоская батарейка. Кроме того, в протезе кисти 1 расположены приемопередатчик (трансивер) 10, микроконтроллер 11 и электрический аккумулятор 12. Микроконтроллер 11 и аккумулятор 12 связаны с сервоприводом 6 тяг и механизмом поворота кисти посредством многоканального проводного кабеля.
Действие и управление протезом руки осуществляется следующим образом.
Управление осуществляется от двуслойной стельки 2 в обуви, в которую встроены сенсорные датчики 7 верхнего слоя для управления пальцами протеза кисти 1 и датчики 8 нижнего слоя для управления поворотом кисти. Приведение в действие датчиков 7 осуществляется нажатием пальцами ноги для управления пальцами протеза, причем один крайний датчик сделан общим под безымянный палец и мизинец стопы, и соответственно управляет безымянным пальцем и мизинцем протеза. Команды на поворот кисти в запястье отдаются при помощи перераспределения веса на стопе на датчики веса 8. Для снятия сигналов с датчиков, в стельке, в зоне своды стопы 9 расположены плоские батарейка, микроконтроллер и приемопередатчик. Для приема сигналов со стельки 2 и включения сервопривода 6 в протезе 1 расположены, приемопередатчик 10, второй микроконтроллер 11 и электрический аккумулятор 12. Крепление протеза на культе предплечья выполнено посредством обхвата 3, к которому крепится запястье кистевого протеза 1, при этом пальцы протеза кисти 1 оснащены звеньями с пружинами 13 с механическими тягами 5, соединенными с расположенным в запястье кисти дистанционно управляемым сервоприводом тяг 6.
Пальцы кисти протеза 1 в исходном состоянии сжаты пружинами 13. При нажатии одного из четырех датчиков 7 на стельке пальцами стопы включаются сервопривода 6 одноименных пальцев на протезе, разжимая их. Причем один крайний датчик 7 сделан общим под безымянный палец и мизинец стопы, и соответственно управляет безымянным пальцем и мизинцем протеза.
При нажатии подушечкой стопы на передний датчик веса 8, в запястье протеза включается привод 6, опускающий кисть.
При нажатии пяткой на задний датчик веса 8, в запястье протеза включается соответствующий привод 6, поднимающий кисть.
При нажатии левым краем стопы на левый датчик веса из группы датчиков 8, в запястье протеза включается соответствующий привод, поворачивающий кисть протеза против часовой стрелки.
При нажатии правым краем стопы на правый датчик веса из группы датчиков 8, в запястье включается привод, отвечающий повороту кисти протеза по часовой стрелке.
Если давление на любой датчик веса становится слишком большим, то происходит отключение протеза, это означает, что человек идет, то есть на время ходьбы протез отключается. Чтобы протез снова включился нужно снять вес тела со стельки и ждать три секунды. Пороговое давление, вызывающее отключение протеза настраивается в управляющей программе, в зависимости от веса человека.
Для удобства управления протезом построена дистанционная система управления от стопы посредством радиопередатчика (фиг. 3, 4). Но управление также возможно через проводное соединение, без использования радиопередатчика.
Общий вид опытной системы показан на фиг. 5, и образец опытной стельки показан на фиг. 6.
В результате внедрения данной разработки, пациент получает протез с независимым движением пальцев без проведения хирургических операций и простого способа установки органа управления в виде стельки, вставляемой в любую обувь.
| название | год | авторы | номер документа |
|---|---|---|---|
| БИОМЕХАНИЧЕСКИЙ КИСТЕВОЙ ПРОТЕЗ | 2019 |
|
RU2731607C1 |
| Функционально-косметический протез кисти | 2021 |
|
RU2775647C1 |
| Способ жестового управления и устройство для его реализации | 2021 |
|
RU2777910C1 |
| ИСКУССТВЕННАЯ БИОЭЛЕКТРИЧЕСКАЯ КИСТЬ РУКИ | 2021 |
|
RU2779492C1 |
| СПОСОБ БИОНИЧЕСКОГО УПРАВЛЕНИЯ ТЕХНИЧЕСКИМИ УСТРОЙСТВАМИ | 2017 |
|
RU2673151C1 |
| Многофункциональный активный протез руки | 1981 |
|
SU1009456A1 |
| Пассивный реабилитационный экзоскелет | 2017 |
|
RU2665386C1 |
| АНТРОПОМОРФНЫЙ МАНИПУЛЯТОР ДЛЯ ИСПОЛЬЗОВАНИЯ НА БЕСПИЛОТНОМ ЛЕТАТЕЛЬНОМ АППАРАТЕ | 2019 |
|
RU2712972C1 |
| Мышечный интерпретатор | 2023 |
|
RU2826231C1 |
| Искусственная механическая рука | 1945 |
|
SU67476A1 |

Изобретение относится к медицине, а именно к управляемым протезам кисти руки. Протез выполнен с возможностью крепления на культе предплечья посредством обхвата. Протез содержит подвижные пальцы и оснащен дистанционным механизмом управления движениями пальцев и поворота кисти. Пальцы протеза кисти выполнены в виде подпружиненных звеньев фаланг, оснащенных механическими тягами, которые соединены с расположенными в запястье, дистанционно управляемыми сервоприводами тяг. Дистанционное управление включает в себя восемь сенсорных датчиков управляющих сигналов, микроконтроллеры, радиопередатчик, радиоприемник и источники электропитания. Датчики расположены в двухслойной стельке обуви таким образом, что четыре датчика из восьми являются управляющими сгибанием пальцев протеза кисти и встроены в верхнем слое стельки в зоне движения пальцев ноги, а четыре других датчика управления поворотом кисти в запястье размещены по бокам нижнего слоя стельки в зонах пятки и подушечки стопы. В стельке в зоне свода стопы размещены микроконтроллер, радиопередатчик и питающая их батарейка. В протезе кисти руки расположены электрический аккумулятор, радиоприемник и микроконтроллер, который связан с сервоприводом тяг и механизмом поворота кисти посредством многоканального проводного кабеля. Достигается повышение удобства управления протезом. 6 ил.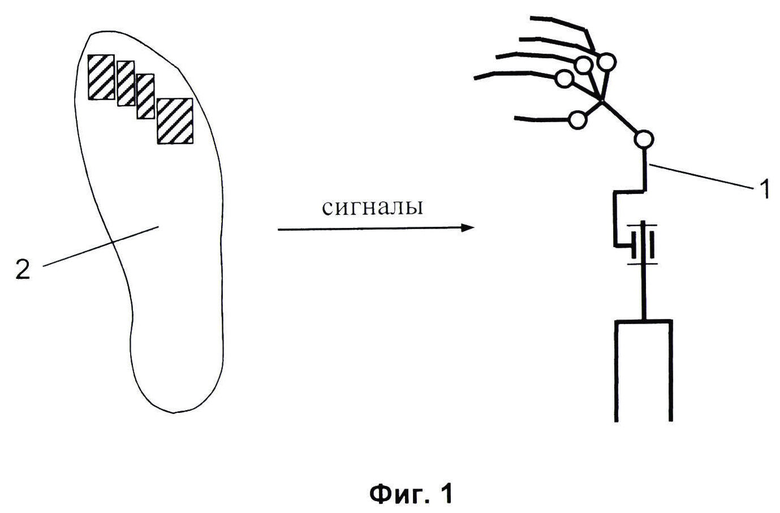
Управляемый протез кисти руки, выполненный с возможностью крепления на культе предплечья посредством обхвата, содержит подвижные пальцы и оснащен дистанционным механизмом управления движениями пальцев и поворота кисти, отличающийся тем, что пальцы протеза кисти выполнены в виде подпружиненных звеньев фаланг, оснащенных механическими тягами, которые соединены с расположенными в запястье, дистанционно управляемыми сервоприводами тяг и механизмом поворота кисти, при этом дистанционное управление включает в себя восемь сенсорных датчиков управляющих сигналов, микроконтроллеры, радиопередатчик, радиоприемник и источники электропитания, причем датчики расположены в двухслойной стельке обуви таким образом, что четыре датчика из восьми являются управляющими сгибанием пальцев протеза кисти и встроены в верхнем слое стельки в зоне движения пальцев ноги, а четыре других датчика управления поворотом кисти в запястье размещены по бокам нижнего слоя стельки в зонах пятки и подушечки стопы, причем в стельке в зоне свода стопы размещены микроконтроллер, радиопередатчик и питающая их батарейка, кроме того, в протезе кисти руки расположены электрический аккумулятор, радиоприемник и микроконтроллер, который связан с сервоприводом тяг и механизмом поворота кисти посредством многоканального проводного кабеля.
| US 9114030 B2, 25.08.2015 | |||
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ИНТЕЛЛЕКТУАЛЬНОЙ БИОНИЧЕСКОЙ КОНЕЧНОСТЬЮ | 2016 |
|
RU2635632C1 |
| СПОСОБ ПРОИЗВОДСТВА ФРУКТОВОГО СОУСА | 2015 |
|
RU2592842C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ И ОХЛАЖДЕНИЯЖИДКОСТЕЙ | 0 |
|
SU192179A1 |
| Сребренная поверхность теплообмена | 1958 |
|
SU127620A1 |

